Изобретение относится к измеритель но-информационной технике, а именно к способам и устройствам неразрушаю- щего контроля физико-механических свойств изделий из ферромагнитных материалов, и может быть использовано для контроля остаточной эксплуатационной прочности изделий в машиностроительной и авиационной промышленности.
Цель изобретения - расширение облас ти применения за счет контроля величины остаточного ресурса, времени эксплуатации контролируемых ферромагнитных изделий и определение остаточной эксплуатационной прочности.
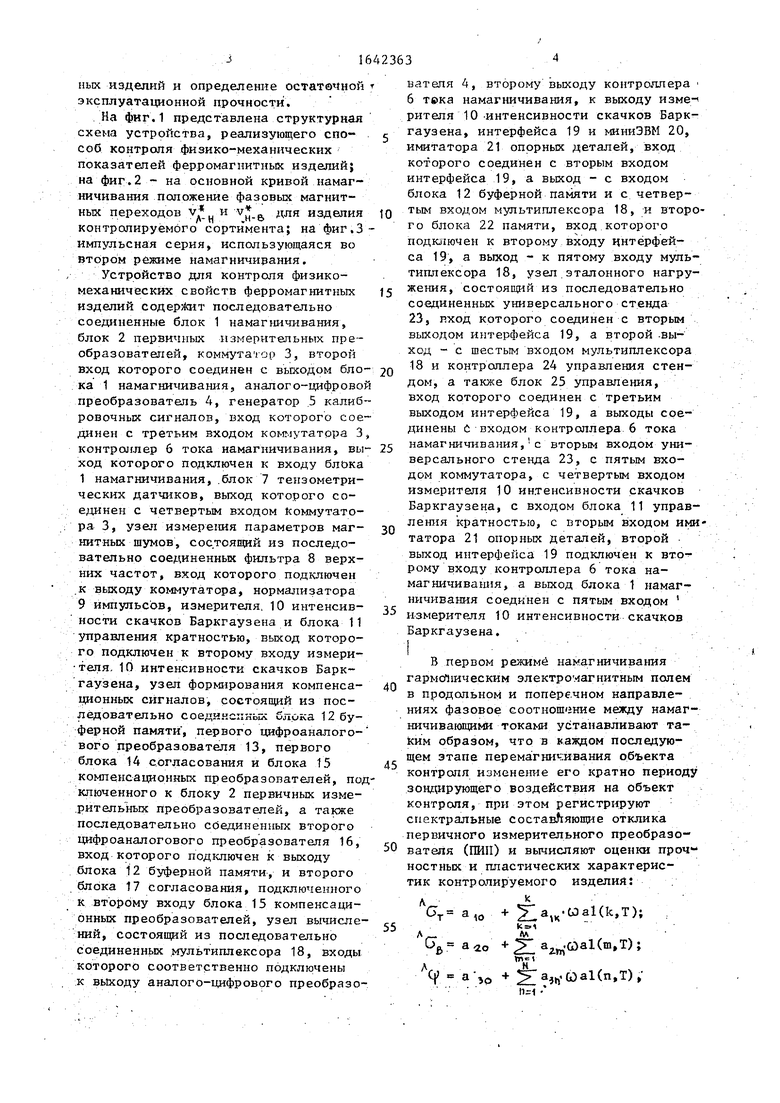
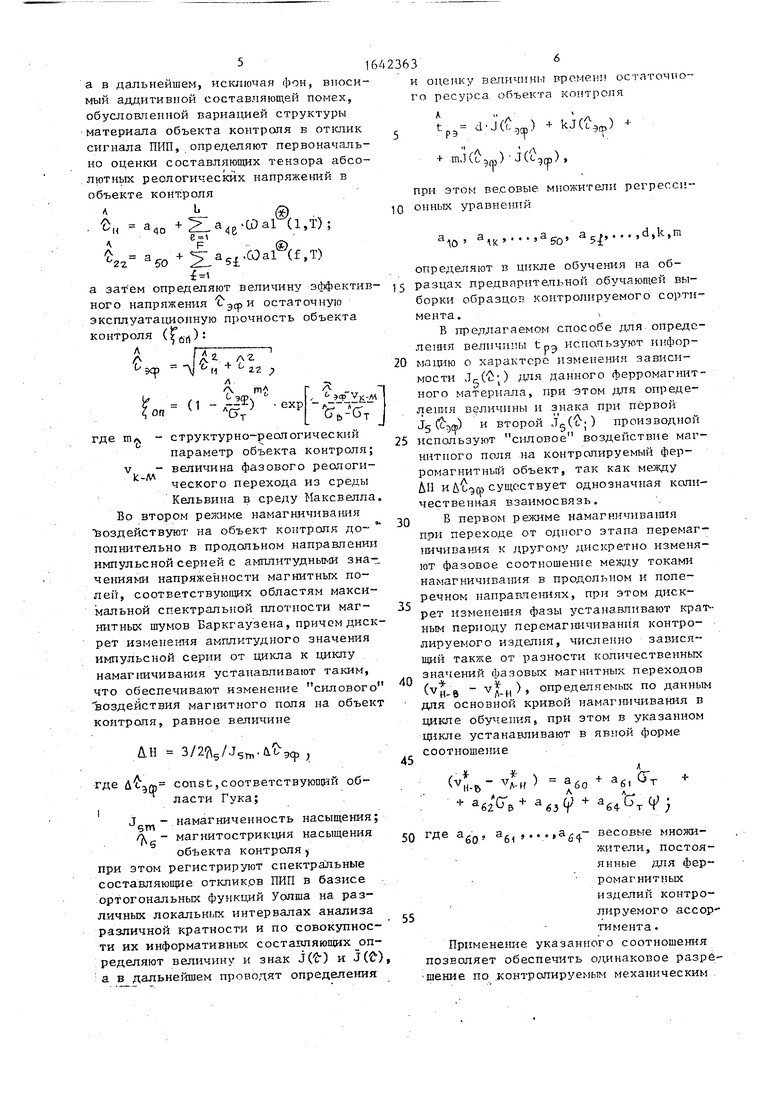
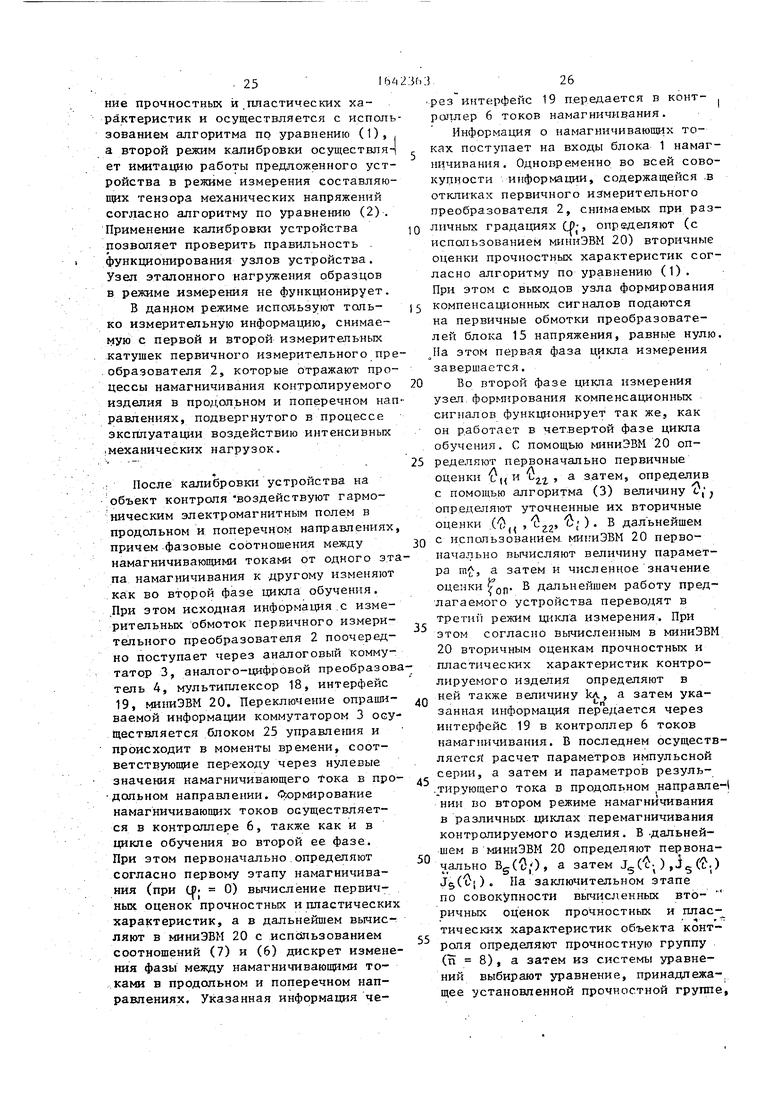
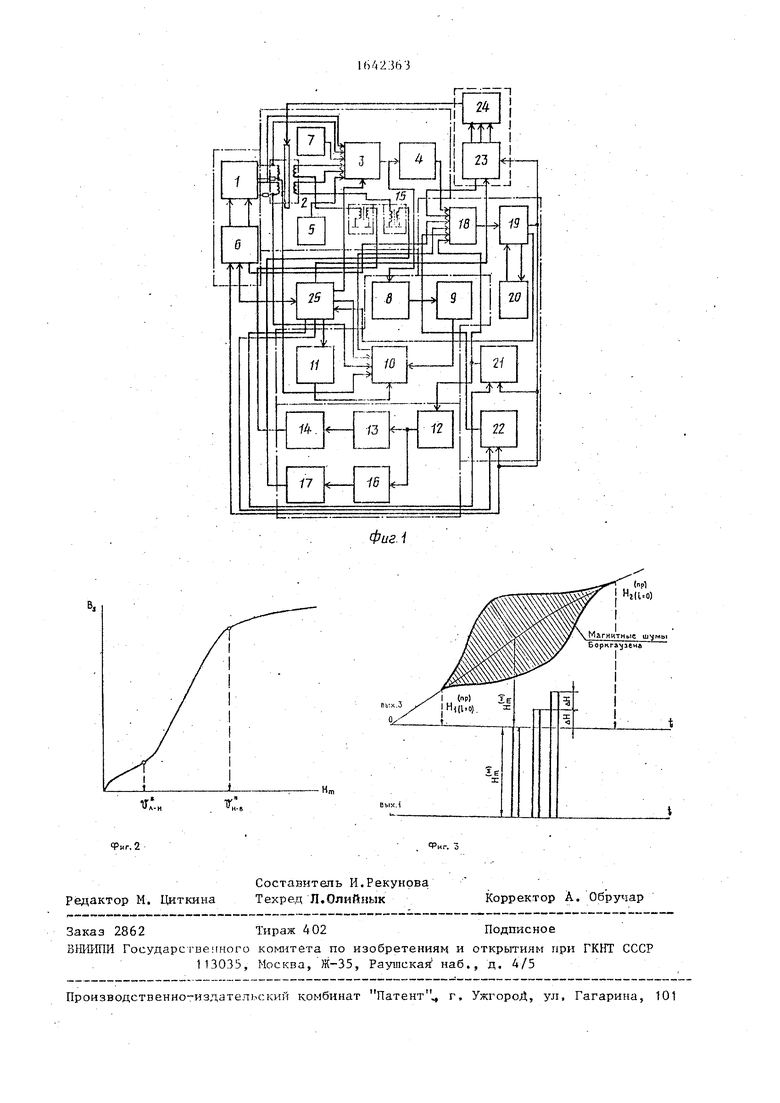
На фиг.1 представлена структурная схема устройства, реализующего спо- соб контроля физико-механических показателей ферромагнитных изделий; на фиг.2 на основной кривой намагничивания положение фазовых магнитных переходов V и для изделия контролируемого сортимента; на фиг.З- импульсная серия, использующаяся во втором режиме намагничирания.
Устройство для контроля физико- механических свойств ферромагнитных изделий содержит последовательно соединенные блок 1 намагничивания, блок 2 первичных измерительных преобразователей, коммута1 л 3, второй вход которого соединен с выходом бло- ка 1 намагничивания, аналого-цифровой преобразователь 4, генератор 5 калибровочных сигналов, вход которого соединен с третьим входом коммутатора 3 контроллер 6 тока намагничивания, вы- ход которого подключен к входу блока 1 намагничивания, блок 7 тензометри- ческих датчиков, выход которого соединен с четвертым входом Коммутатора 3, узел измерения параметров маг- нитных шумов, состоящий из последовательно соединенных фильтра 8 верхних частот, вход которого подключен к выходу коммутатора, нормализатора 9 импульсов, измерителя 10 интенсив- ности скачков Баркгаузена и блока 11 управления кратностью, выход которого подключен к второму входу измерителя 10 интенсивности скачков Баркгаузена, узел формирования компенса- ционных сигналов, состоящий из последовательно соединенных блика буферной памяти, первого цифроаналого- вого преобразователя 13, первого блока 14 согласования и блока 15 компенсационных преобразователей, подключенного к блоку 2 первичных измерительных преобразователей, а также последовательно соединенных второго цифроаналогового преобразователя 16, вход которого подключен к выходу блока 12 буферной памяти, и второго блока 17 согласования, подключенного к второму входу блока 15 компенсационных преобразователей, узел вычислений, состоящий из последовательно соединенных мультиплексора 18, входы которого соответственно подключены к выходу аналого-цифрового преобразо
вателя 4, второму выходу контроллера 6 тека намагничивания, к выходу изме-ч рителя 10 интенсивности скачков Баркгаузена, интерфейса 19 и миниЭВМ 20, имитатора 21 опорных деталей, вход которого соединен с вторым входом интерфейса 19, а выход - с входом блока 12 буферной памяти и с четвертым входом мультиплексора 18, и второго блока 22 памяти, вход которого подключен к второму входу интерфейса 19, а выход - к пятому входу мультиплексора 18, узел эталонного нагру- жения, состоящий из последовательно соединенных универсального стенда 23, РХОД которого соединен с вторым выходом интерфейса 19, а второй выход - с шестым входом мультиплексора 18 и контроллера 24 управления стендом, а также блок 25 управления, вход которого соединен с третьим выходом интерфейса 19, а выходы соединены С входом контроллера 6 тока намагничивания, с вторым входом универсального стенда 23, с пятым входом коммутатора, с четвертым входом измерителя 10 интенсивности скачков Баркгаузена, с входом блока 11 управления кратностью, с вторым входом имитатора 21 опорных деталей, второй выход интерфейса 19 подключен к второму входу контроллера 6 тока намагничивания, а выход блока 1 намагничивания соединен с пятым входом измерителя 10 интенсивности скачков Баркгаузена.
В первом режиме намагничивания гармоническим электромагнитным полем в продольном и поперечном направлениях фазовое соотношение между намагничивающими токами устанавливают таким образом, что в каждом последующем этапе перемагню-ивания объекта контроля изменение его кратно периоду зондирующего воздействия на объект контроля, при этом регистрируют спектральные составляющие отклика первичного измерительного преобразователя (ПИИ) и вычисляют оценки прочностных и пластических характеристик контролируемого изделия:
а в дальнейшем, исключая фон, вносимый аддитивной составляющей помех, обусловленной вариацией структуры материала объекта контроля в отклик сигнала ПИП, определяют первоначально оценки составляющих тензора абсолютных реологических напряжений в объекте контроля
L,©,
Л °н Мо
а4е-СОа (1,Т);
L2-z а50
Ffi)
+ a5i-COaAf,T)
f
а затем определяют величину эффективного напряжения с эср и остаточную эксплуатационную прочность объекта контроля (6rt):
$г
лг zz .
л
Л. гпл
(1 - --22) U ЛСГТ;
Г , Эф Vv-M
ехр Ь&-0Т
где т - структурно-реологический
параметр объекта контроля;
v - величина фазового реологи- k-M
ческого перехода из среды
Кельвина в среду Максвелла. Во втором режиме намагничивания воздействуют на объект контроля до- полнителъно в продольном направлении импульсной серией с амплитудными зна- чениями напряженности магнитных по лей, соответствующих областям максимальной спектральной плотности магнитных шумов Баркгаузена, причем дискрет изменения амплитудного значения импульсной серии от цикла к циклу намагничивания устанавливают таким, что обеспечивают изменение силового воздействия магнитного поля на объект контроля, равное величине
АН 3/2ft5/J5n,.uЈ9q, }
где , const,соответствующий области Гука; I
J намагниченность насыщения;
А - магнитострикция насыщения 1 S
объекта контроля)
при этом регистрируют спектральные составляющие откликов ПИП в базисе ортогональных функций Уолша на различных локальных интервалах анализа различной кратности и по совокупности их информативных; составляющих определяют величину и знак J№) и J(CO, а в дальнейшем проводят определения
и оценку величины времени ос сточного ресурса объекта контроля
рэ
d
А
kjtf
ЭФ
)
пит(& ) Jtf9(f),
10
при этом весовые множители регрессионных уравнений
МО
lu
5-0 а$1
,. .. , d, k, ш
определяют в цикле обучения на об- разцах предварительной обучающей выборки образцов контролируемого сортимента.,
В предлагаемом способе для опреде- ления величины tp используют инфор- мацию о характере изменения зависимости ) для данного ферромагнитного материала, при этом для определения величины и знака при первой JA (ЈЧа)) т (
J5 y и второй ) производной используют силовое воздействие магнитного поля на контролируемый ферромагнитный объект, так как между АН и й Ь эф существует однозначная количественная взаимосвязь.
В первом режиме намагничивания при переходе от одного этапа перемаг- ничивания к другому дискретно изменяют фазовое соотношение между токами намагничивания в продольном и поперечном направлениях, при этом дискрет изменения фазы устанавливают кратным периоду персмагничивания контролируемого изделия, численно зависящий также от разности количественных значений фазовых магнитных переходов ( - vЈH), определяемых по данным для основной кривой намагничивания в цикле обученияs при этом в указанном цикле устанавливают в явной форме соотношение
Н-&
+ а
VA-H
+
16о
+ а
б2и&
63
V +
6Ф
6i
К
огт
V)
где або afi1 ,...,
абГ
весовые множи- жители, постоя- янные для ферромагнитныхизделий контролируемого ассортимента .
Применение указанного соотношения позволяет обеспечить одинаковое разрешение по контролируемым механическим
16
напряжениям для ферромагнитных изде-
лий из различных ферромагнитных материалов.
Длительность импульсов серии намагничивания во втором режиме намагничивания устанавливают такой, при которой уже практически не сказывается влияние магнитной вязкости на процесс намагничивания контролируемого изделия.
В первом режиме намагничивания аплитуды полей в продольном и поперечном направлениях устанавливают такими, что обеспечивают перемагничива ние изделий контролируемого ассортимента по предельным петлям (И g мд 50-150 кА/м)„ Выбор диапазона изменения амплитудных значений импульсной серии намагничивания во вто ром режиме зондирования объекта контроля осуществляется на основе определения диапазона напряженностей магнитных полей, соответствующих протеканию интенсивных процессов смещения доменных границ (по скачкам Баркга- узена), и осуществляется на образцах представительной обучающей выборки.
В данном способе, обеспечивающем измерение величины остаточной эксплуатационной прочности и остаточного ресурса -времени безаварийной эксплуатации объекта контроля, величину определяют в режиме обучения на представительной обучающей выборке образцов различных прочностных групп, при этом на последние поочередно воздействуют эталонными нагружениями в области Гука, одновременно его зондируют магнитным полем в продольном направлении, регистрируют деформации в последних и отклики сигналов первичных измерительных преобразователей, при этом используя информацию о приращении намагничивания объекта контроля, обусловленных реологическим полем (Сдда), определяют величины s для образцов представительной обучающей выборки, а в дальнейшем опре/ 5 деляют зависимость величины (--) от
JSn
х прочностных и пластических харакеристик:
- 5 - к + к + -- ЬЛ + b (.--; +
А
k и
+ Ь,
JSm
/Л v (vJ.j- B - V5;H7
Jgm
Jsm
+ Ъ
12.
A Vr-v
VH vr-v,
г-к
0
t - весовые множители, определяемые н цикле обучения;
i i структурно-прочностные параметры, зависящие от свойств материала изделий контролируемого сортимента, также определяется в цикле обучения на совокупности эталонных образцов, принадлежащих различным
л прочностным группам;
оценка величины реологического поля, соответствующая фазовому реоло-k0 + k(
гическому переходу,
+ ьисг,
где k0, k,,,
k , k-j-j- весовые множители, определяемые в цикле обучения.
Устройство работает следующим образом.
Первоначально осуществляют цикл обучения, который содержит восемь фаз обучения.
В первой фазе обучения на сменные эталонные образцы различных прочностных групп контролируемого сортимента поочередно воздействуют гармоническим полем в диапазоне от нуля до 120кА/м на частоте анализе (fq 20-300 Гц) с дискретом изменения амплитуды поля 5 кА/м, регистрируют индукцию насыщения ВЈ
на указанных дискретах и устанавливают в дальнейшем с использованием миниЭВК 20 в явной форме основные кривые намагничивания для эталонных образцов различных прочностных групп, при этом определяют Н5, а также характерные точки излома указанных кривых намагничивания в областях слабых и сильных зондирующих полей ( , ун-0) (фиг.2). При определении BS используют информацию о среднем значении сигналов откликов первичного измерительного преобразователя 2 (продольной и поперечной компоненты), которые определяют по совокупности дискретных отсчетов, при этом частоту квантования измеряемого интервала анализа (периода сигнала) устанавливают кратной периоду сигналов откликов первичного измерительного преоб916
разователя 2. Одновременно с помощью узлов устройства устанавливают в первой фазе обучения граничные значения напряженностей магнитных полей, соответствующих области существования магнитных шумов для различных прочностных групп. Одновременно переключают диапазоны интервалов обзора с помощью блока 11 управления кратностью интервала анализа и блока 25 управления, причем последний обеспечивает при переходе к последующему периоду перемагничивания эталонного изделии уменьшения кратно двум интервала обзора магнитных шумов. В дальнейшем измеряют на указанных интервалах анализа с помощью измерителя 10 интенсивность скачков Баркгаузе
чально определяют их аномальные значения в области слабых и сильных попей, а затем и численные значения фазовых магнитных переходов , (фиг.2) Указанная информация записывается в дальнейшем также в имитатор 21 опорных эталонных деталей, представляющий по конструктивному исполнению ППЗУ, при этом адресную часть сообщения определяют дачные о пределе текучести (младший байт), об относительном суждении (средний байт), а порядковый номер дискретного сообщения, отражающего текущие значения откликов первичного измерительного преобразователя при (Уг - const,
на. При этом выдешиот интервалы полей 20 (i) const и Ј 0 содержится в старшем байте адресной части информационного слова (N ; Ј. 64) . В ячейках
„(пр)
Н.,,., Н,.. (верхний и нижний
порого- максималыюй
(
вые значения полей) с интенсивностью скачков Баркгаузена для различных прочностных групп образ-25 цов контролируемого сортимента, а по завершению этой операции заносят укам
1 (Пр) (ПО)
занные значения Н и II в имитатор 21. Указанная информация с конт- - роллера 6 тока намагничивания через перепрограммированный параллельный интерфейс 19 поступает в имитатор 21, при этом запись и считывание информации с него во времени синхрони-35 зируется блоком 25 управления.
Сбор измерительной информации и преобразование в цифровую форму исходного сообщения осуществляется следующим образом.40
Исходная измерительная информация с выходных обмоток первичного измерительного преобразователя 2 поочередно поступает через аналоговый 45 коммутатор 3 на вход аналого-цифрового преобразователя 4. С выхода последнего измерительная информация, представленная в цифровой форме, пос- тупает далее через мультиплексор 18 50 и перепрограммируемый параллельный интерфейс 19 в миниЭВМ 20. Согласно указанной информации с помощью последней определяется зависимость Bg f(H ) (где Н - амплитудное значе- 55 ние магнитного поля) в явной форме, в дальнейшем в миниЭВМ 20 вычисляются также текущие значения производимитатора 21j соответствующих (для старшего байта указанного информационного слова) хранится информа, ..
ция о числовых значениях v
л-н vn-6
Кроме того, в ячейках указанной адресной части хранится также информа 5
ция о числовых значениях --, опредеJS
ляемая в четвертой фазе цикла обучения для каждого эталонного образца, принадлежащего к обучающей представительной выборке образцов.
Во второй фазе цикла обучения используют исходные образцы обучающей выборки, принадлежащие различным прочностным группам изделий контролируемого сортимента, при этом на указанные эталонные образцы поочередно с помощью блока 1 намагничивания воздействуют электромагнитным гармоническим полем на частоте анализа (ffl). Амплитудное значение токов намагничивания устанавливают с по- . мощью контроллера 6 тока намагничивания равным величине фазовое соотношение С| (между током намагничивания в продольном и поперечном направлениях) в каждом 1акте намагничивания изменяют.
Для каждого образца контролируют поочередно продольную и поперечную iсоставляющие отклика сигналов первичного измерительного преобразователя 2. Определяют первоначально гармоники Уолша различной кратности (n - 0,1S2S3)S а на мнительном этапе второй фазы цикла обучения
10
ных ---- на основании которыхпррвонаdnm
5
чально определяют их аномальные значения в области слабых и сильных попей, а затем и численные значения фазовых магнитных переходов , (фиг.2) Указанная информация записывается в дальнейшем также в имитатор 21 опорных эталонных деталей, представляющий по конструктивному исполнению ППЗУ, при этом адресную часть сообщения определяют дачные о пределе текучести (младший байт), об относительном суждении (средний байт), а порядковый номер дискретного сообщения, отражающего текущие значения откликов первичного измерительного преобразователя при (Уг - const,
(i) const и Ј 0 содержится в старшем байте адресной части информационного слова (N ; Ј. 64) . В ячейках
имитатора 21j соответствующих (для старшего байта указанного информационного слова) хранится информа, ..
ция о числовых значениях v
л-н vn-6
Кроме того, в ячейках указанной адресной части хранится также информа 5
ция о числовых значениях --, опредеJS
ляемая в четвертой фазе цикла обучения для каждого эталонного образца, принадлежащего к обучающей представительной выборке образцов.
Во второй фазе цикла обучения используют исходные образцы обучающей выборки, принадлежащие различным прочностным группам изделий конролируемого сортимента, при этом на указанные эталонные образцы поочередно с помощью блока 1 намагничивания воздействуют электромагнитным гармоническим полем на частоте анализа (ffl). Амплитудное значение токов намагничивания устанавливают с по- . мощью контроллера 6 тока намагничивания равным величине фазовое соотношение С| (между током намагничивания в продольном и поперечном направлениях) в каждом 1акте намагничивания изменяют.
Для каждого образца контролируют поочередно продольную и поперечную iсоставляющие отклика сигналов первичного измерительного преобразователя 2. Определяют первоначально гармоники Уолша различной кратности (n - 0,1S2S3)S а на мнительном этапе второй фазы цикла обучения
(с использованием регрессионной процедуры) устанавливают в явной форме соотношения, обеспечивающие много- параметровый контроль прочностных и пластических характеристик объекта исследований (Gr ,01, (р) . При этом для более полного отображения информации о структуре материала (характера распределения по слоям) используется в предлагаемом изобретении дискретное изменение фазы между намагничивающими токами (ДСр- 7,2-36°) , кратное периоду намагничивающего тока,от одного этапа намагничивания к другому, что позволяет выявлять в матрице основного металла наличие включений,существенно влияющих на прочностные и пластические свойства контролируемых изделий При этом величину ДЦ( устанавливают из
условия кратности величине
it-яv«l. . ъ - Л CD- -- H(nwxl - ЛЧ|
и выбирают ближайшее по значению, при которых выполняется условие кратности их периоду леремагничива- ния. Выполнение соотношения (7) обеспечивает, в свою очередь, выполнение условия одинаковой разрешающей способности по указанным контролируемым параметрам для изделий различных сор- тотипов, имеющих существенное различие в характеристиках, отражающих динамику процесса перемагничивания деталей, которые, в свою очередь, неразрывно связаны с характером формирования реоменных мезоструктур в объеме исследуемого объекта в силу проявления механизма магнитореологи- ческой аналогии в области слабых и средних зондирующих полей. При этом контроллер 6 тока намагничивания обеспечивает при переходе от одного цикла намагничивания к другому изменения фазы намагничивающего тока в поперечном направлении относительного продольного направления намагничивания с приращением на постоянную величину Д( . Последнее достигается тем, что в контроллере 6 изменение фазового угла реализуется путем сдвига адресной части информационных слов в ППЗУ на п (т.е. N(j N; + п) ; при этом последнее реализуется путем использования микропроцессора в контроллере 6 тока намагничивания.
Выходная информация через цифро- аналоговые преобразователи контроллера 6 тока намагничивания в аналого1642363
12
вой форме поступает на блок 1 намагничивания, представляющий собой конструктивно два усилителя тока, нагруженные на намагничивающие обмотки первичного измерительного преобразователя 2. Во второй фазе цикла обучения информация в виде дискретных выборок (при различных градациях фазы
между токами намагничивания) одновременно поступает через интерфейс 19 в миниЭВМ 20 и в имитатор 21 опорных эталонных деталей, что позволяет в дальнейшем при измерении напряжен5 ного состояния объекта контроля исключить влияние аддитивной составляющей погрешности, обусловленной вариацией структуры материала изделий контролируемого сортимента. На завершающем
0 этапе второй фазы цикла обучения с использованием миниЭВМ 20 устанавливают в явной форме составляющие уравнения, используемые для контроля величины Vjjt6- . Квантование исход5 ного сообщения осуществляется с частотой, равной частоте формирования сигналов намагничивания в контроллере 6 токов намагничивания. Переход на другой режим намагничивания осущест0 вляется с помощью управляющей миниЭВМ 20, которая через перепрограммируемый параллельный интерфейс 19 воздействует на блок 25 управления и синхронизации, который, в свою очередь, запоминает принятую команду и дискрет изменения по фазе между намагничивающими токами. После завершения выполнения команды формирования намагничивающих токов на зацанном интервале зцндирования объекта контроля (кратном периоду намагничивания) контроллером 6 токов намагничивания принимается исходное сообщение о новом режиме намагничивания и осуществляется в дальнейшем указанная сортировка адресной части в ППЗУ контроллера 6 токов намагничивания соответствующей части, где осуществляется хранение информации о намагничивающем токе, осуществляющем зондирование объекта в поперечном направлении. При этом блок 25 управления и синхронизации после приема команды первоначально дешифрирует адрес обращения (контроллер 6 токов намагничивания или контрллер 24 управления стендом и т.д.), а в дальнейшем, определив объект, к которому обращается управляющая миниЭВМ 20, запрашива
5
0
5
0
ет его о готовности принять сообщение и после подтверждения им запроса готовности на прием информации блок 25 управления передает указанное сообщение по адресу обрапения. При обращении периферийного блока, например контроллера 6 токов намагничивания, о завершении выполнения заданного режима намагничивания блок 25 управления обеспечивает передачу сообщения в управляющую миниЭВМ 20 через мультиплексор 18 и интерфейс 19. При одновременном обращении к управляющей миниЭБМ 20 несколько периферийных блоков она их запоминает и производит перезоначально связь с блоком, имеющим высокий приоритет (контроллером 24 управления стендом или контроллером 6 токов намагничивания), а затем имеющим нижние приоритеты (аналоговый коммутатор 3 измерителя 10 интенсивности скачков Баркгаузена, блок 22 памяти, имитатор 21 опорных эталонных деталей).-
Одновременно с вычислением в микро ЭВМ 20 спектральных составляющих Уол- ша в измерителе 10 определяются на локальных двоичных интервалах, соответствующих максимальной спектральной плотности магнитных шумов, интенсивность скачков Баркгаузена путем подсчета их количества на указанных локальных интервалах, определяемых
значениями Н. и .ч , где
КО
2(0
1
0,1,2,3,4 - кратность двоичных интервалов, кратных интервалу (Н - наличия магнитных шумов в спектре сигналов - откликов преобразователя 2. Первоначально исходная информация О СОВОКУПНОСТИ J 7Г1 И
Н,плД заносится по команде, поступающей из блока 25 управления, из имита
тора 21 опонных эталонных изделий в измеритель 10 интенсивности скач- ков Баркгаузена в его буферную память С выхода,1 коммутатора 3 информация об откликах сигналов преобразователя 2 поступает на фильтр 8 верхних частот, на выходе которого присутствует информация только о магнитных шумах. В дальнейшем информация нормализуется по амплитуде в нормализаторе 9, с которого она поступает на вход измерителя 10. На другой вход последнего поступает информация с выхода блока 1 намагничивания о текущих значениях намагничивающих токов, обеспе чивающнх намагничивание сменного
10
25
20
0
эталонного образца в продольном и | поперечном направлениях. Кодосостоя- ние блока 15 управления кратностью определяется номером цикла перемагни- чивания при исходных начальных условиях намагничивания. После завершения вычисления интенсивности магнитных шумов на локальных интервалах кратности m 3 измеритель 10 интенсивности скачков Баркгаузена сигнализирует о завершении указанной фазы измерения в миниЭВМ 20 через мультиплексор 18 и интерфейс 19„ МиниЭВМ j 20 через блок 22 управления и синхронизации воздействует на контроллер 6 токов намагничивания, который, в свою очередь, переводит работу блока 1 намагничивания на последующий режим намагничивания (другой последующий дискрет фазы между намагничивающими токами). Смену эталонного образца одной прочностной группы на образец последующей прочностной группы осуществля- .ют после изменения режимов намагничивания по фазе всей совокупности ее дискретов (в пределах 360°). При этом для всей совокупности откликов первичного измерительного преобразователя 2 в миниЭВМ 20 вычисляют спектральные составляющие Уолша различной кратности, а в измерителе 10 интенсивности скачков Баркгаузена определяют интенсивности скачков Баркгаузена на различных интервалах анализа магнитных шумов, при этом указанную информацию одновременно записывают через мультиплексор 18 и интерфейс 19 в ми- ниЭВМ 20 и имитатор 21 эталонных опорных изделий.
На основании указанной информации и данных о прочностных и пластических характеристиках (Gr , Of , М ) для сменных эталонных образцов, принадлежащих обучающей выборке в мини- ЭВМ 20 с использованием регрессионной процедуры определяют явный вид уравнений (1), обеспечивающих неразрушаю- щий электромагнитный контроль чин GI т , (Гв , (р . В первой и второй фазе обучения на первичные обмотки компенсационных первичных преобразователей блока 15 подают с соответствующих цифроаналоговых преобразователей 13 и 16 через согласующие устрой- - ства 14 и 17 (эмиттерные повторители) напряжения, равные нулю, так как исходная информация, хранимая в буфер- ной памяти 12, соответствует в данном
30
35
40
5
I
1Ь164
случае числу нуль1 . Измерительные обмотки первичного измерительного преобразователя 2 включены встречно с обмотками измерительных катушек компенсационных первичных преобразовате лей блока 15.
В третьей фазе цикла обучения совокупность сменных эталонных изделий подвергают поочередно с помощью уни- нереального стенда 23 эталонному погружению в диапазоне изменения механических напряжений, соответствующем области Гука. При этом дискретность изменения механических напряжений ус- танавливают равной 10-20 МПа и определяют с помощью миниЭВМ 20 численные значения фазовых реологических переходов из среды Гука в среду Кельвина (v ) для эталонных образцов различ- ных прочностных групп, принадлежащих обучающей выборке. Для этого используют информацию о продольной У1 п и поперечной У 0,. составляющей, снимаемой с блока 7 тензометрических датчиков, которая через аналоговый коммутатор
3,аналого-цифровой преобразователь
4,интерфейс 19, мультиплексор 18 поступает в миниЭВМ 20. В последней вычисляется результирующая деформация
i 2. ч
согласно алгоритму - JJfnp + If пп а в дальнейшем по вычисленным значениям первой производной dtf; /dC; определяют величину Vj-.для сменных эталонных образцов обучающей выборки, при- надлежащих различным прочностным группам, при этом используют критерий отличия указанной производной от нулевого значения.
В третьей фазе цикла обучения на указанные образцы не воздействуют электромагнитным полем. Управление универсальным стендом 23 осуществляется контроллером 24 управления стендом.
Начальные условия нагружения сменных эталонных изделий обучающей выборки задаются программным обеспечением миниЭВМ 20, которые через интерфейс 19 поступают в контроллер 24 управления стендом, при этом первоначально передается адресная часть, а затем информативная часть сообщения по шине ША/ШД.
По конструктивному исполнению конт роллер 24 управления стендом соответствует контроллеру 24 управпения K1-IO, в который дополнительно введены цчфроаналоговые преобразователи,
Ь
с помощью которых осуществляется управление сервомеханизмами универсального стенда 23. После определения величин эталонных образцов различных прочностных групп осуществляют поочередно дальнейшее нагружение части сменных эталонных образцов, при этом охватывают динамику изменения прочностных и пластических характеристик для изделий контролируемого сортимента (в области Кельвина), причем воздействуют на последние одинаковыми по величине реологическими полями в продольном и поперечном направлениях. В дальнейшем определяют соглас но алгоритму (7) в миниЭВМ 20 величины Y в дискретных точках нагружения эталонных образцов, а затем по анома, df;
лиям производной определяют и
dV«
величину фазовых реологических переходов из среды Кельвина в среду Максвелла () . После выполнения указанной операции осуществляют определение в явной форме зависимости CP(Cj) для эталонных образцов различных прочностных групп и сравнивают последние с зависимостями JJ (0(Нв)для указанных сменных образцов, определяемых в первой фазе обучения, и устанавливают интервалы полей (магнитных и реологических), для которых указанные зависимости связаны линейными
соотношениями (от нуля до Y ., Н.). В четвертой фазе обучения опредеД$ч
ляют ь явной форме величину (--;,
J5
при этом используют сменные эталонные образцы, не подвергавшиеся ранее нагружению (в третьей фазе цикла обучения) . На последние воздействуют гармоническими электромагнитными полями с приращением по Нт (от цикла к циклу перепагничивания эталонных изделий), равным 0,50 кА/м, при этом определяют вносимые магнитным полем магнито- стрикционные деформации насыщения У5(гп) , а с помощью первичного измерительного преобразователя 2 выделяют информацию о Jg(m). В миниЭВМ 20 определяют первоначально магнитострик- цию насыщения 7х№ (ш) так как габаритные размеры контролируемого изделия известны, а затем вычисляют отftsCm)
ношение которое позволяет ус- Js(m)
танавливать зависимость между магнитным и реологическими полями сбгласно выражению (4).
После достижения Н Hm вычисляют с использованием всей совокупнос- ти усредненное значение
Ьъ
К
3/2
М
«
(т
где J5 - i Z. & M
В данной фазе обучения узел формирования компенсационных сигналов функционирует аналогично, как в первых двух фазах обучения. Узел эталонного нагружения образцов не функционирует На первичные обмотки компенсационных преобразователей блока 15 поступают компенсационные напряжения с выходов цифроаналоговых преобразователей
13,16 через согласующие устройства
14,17, равные нулю. В дальнейшем устанавливают в явной форме вид уравнения (6) с использованием миниЭВМ20
В последующей фазе цикла обучения определяют в явном виде регрессионное уравнение (2), позволяющее контролировать в цикле измерения составляющие механических напряжений гн и Ј2z при этом узел формирования компенса- ционных сигналов обеспечивает синхронно с шагом квантования исходного континуального сигнала в аналого-цифровом преобразователе 4 и выдачу в виде дискретных выборок (поступающих на входы цифроаналоговых преобразова- телей 13,16, через буферную память 12 из соответствующих ячеек имитатора 21 опорных эталонных изделий) фоновой составляющей отклика первичного измерительного преобразователя, обусловленной вариацией структуры металла изделий контролируемого сортимента, устанавливаемой во второй фазе цикла обучения. Указанная информация через согласующие устройства 14, 17 поступает на первичные катушки компенсационных первичных преобразователей блока 15, тем самым обеспечивает исключение аддитивной составляющей погрешности измерения Ј( и с 2z обусловленной вариацией структуры (прочностных и пластических характеристик) для изделий контролируемого сортимента. В данной фазе узел формирования зондирующего воздействия на объект контроля функционирует так же, как и во второй фазе цикла обучения. Отличие заключается в том,
10
jr0
.
25
40
45
55
что после смены режима эталонного на- нагружения сменных образцов, принадлежащих представительной обучающей выборке, оно вновь по запросу контроллера 24 управления стендом запускается ка повторный режим работы. При этом запрос на повторный режим работы узла формирования зондирующего воздействия поступает по шине управления в блок 25 управления, который, в свою очередь, оповещает контроллер 24 управления стендом о приеме им данного запроса. В свою очередь, блок 25 управления согласно принятому запросу разрешает передачу указанной команды через мультиплексор 18, интерфейс 19 в контроллер 6 намагничивания. После получения сообщения контроллером 6 тока намагничивания последний подтверждает получение запроса от контроллера 24 управления стендом.
Одновременно с передачей компенсационных напряжений с выхода узла формирования компенсационных сигналов на первичные обмотки преобразователей блока 15 осуществляется выдача с соответствующих ячеек памяти имитатора 21 численных значений интен- сивностей скачков Баркгаузена, полученных на локальных интервалах анализа различной кратности магнитных шумов во второй фазе цикла обучения (при x/j 0) в соответствующие разряды буферной памяти измерителя 10 интенсивности скачков Баркгаузена. Использование указанной информации позволяют исключить влияние аддитивной составляющей погрешности, обусловленной вариацией структуры, при контроле составляющих тензора механических напряженийЈм и L-22 . Указанные фоновые составляющие в дальнейшем вычи- , таются (в измерителе 10 интенсивности) из суммарной интенсивности скачков Баркгаузена на указанных интервалах анализа магнитных шумов, когда jна объект контроля воздрйствуют механические напряжения (Ј, 0). Сменные эталонные образцы, принадлежащие представительной обучающей выборке, используемые также в четвертой фазе цикла обучения, нагружают циклически с помощью универсального стенда 23 нагрузками, изменяющимися во времени по треугольному закону, с дискретом изменения реологических полей 10- 20 МПа. Амплитуду нагружения от цик- ,ла к циклу нагружения увеличивают
10-20 МПа.
такке на вечичину, равную начиная со значения 10-20 МДа, тем самым создают в объекте контроля реологические поля, обусловленные растягивающими и сжимающими нагрузками, Нагружения сменных эталонных об- рачцов, принадлежащих различным прочностным группой, осуществляют с помощью универсал йог о с рнда 23 в двух ортогональных направлениях, при этом управление последнего осуществляют с 2юмощыо контроллера 24 управления стендом на основе начальных условий нагружений.в данной фазе цикла обучения, задаваемых с помощью миниЭВМ 20 (согласно ее программному обеспечению) . В данной фазе никла обучения при нагруженпи сменных образцов, в отличие от предыдущей фазы обучения, используют по одному образцу, принадлежащему каждой прочностной г руппе изделий контролируемого сортимента при одной градации асимметрии нчгруже нш.. Максимальную амплитуду ния устанавливают равной 0,95 i (деформации Гриффитсона). В качестве инфор тативных составляющих использу- inr гармоники Уолша, определяемые на интервалах анализа различной кратности с помощью миниЭВМ 20, причем используют только те гармоники, которые соответствуют зондирующим магнитным полям Н С П., т.е. в области полей, где в большей мере проявляется механизм магнитореологической аналогии в изделиях на ферромагнитной основе. При нагру енин эталонных образцов различных прочностных групп используют следующие градации асимметрии цикла нагруления:
гдг
Дпя всей совокупности откликов сигналов первичного измерительного преобразовате 1Ч 2, несущих измерительную информацию о напряженном состоянии, создаваемом л теле эталонных образцов при различных условиях их нагружения с использованием регрессионной процедуры, устанавливают с помощью миниЭВМ 20 явный вид урав- нений (2), согласно которому в цикле измерения осуществляют измерение величин Ј, и Ј„,.В связи с гем, что в
области слабых и средних полей (до
И, и, соответственно, до) между
i
магнитными и реологическими свойствами ферромагнитных материалов наблюдается линейные заьисимости, а при Н ; II и tN с. между ними наблюдаются только однозначные зависимости (прежде всего, между параметрами И: п f|), цоттому для повышения
тц
Л
точнос- многопараметрового контроля Ј
5
0
и . электР°магнитными методами необходимо осуществлять вычисление вто- оценок величин Јм(Ји) и t- ( t-22) . При установлении в явном виде уточненных регрессионных оценок величин реологических полей используются исходные информативные составляющие Исходных уравнений, производят только перенормировку весовых множи-
5
телеи при них , ,..., а, а. Перенормировку указанных весовых множителей осуществляют с использованием регрессионной процедуры по совокупности информативных составляющих соответственно при уровнях нагружения
.
С
которые реализуют раз0
5
дельно.
Определение структурно-реологического параметра тл, зависящего однозначно от степени потери несущей способности контролируемого изделия в процессе его эксплуатации (изготовленного из данной марки стали), осно-4- вано на вычислении в данно.м цикле
в данном
,JTJ
лсгриср
обучения параметра л
7от 1 оторый отражает степень потери несущей способности объекта контро0ля. Величина ) совпадает количествен чо с величиной оп в области Гука и Кельвина, а в области Максвелла наблюдается некоторое их различие, так как не учитывается в этом случае
с Имеющий место в этой области нагружения временной фактор разрушения
С
контролируемого изделия. L учетом указанного фактора величина гГ . , . Ј: ,
0
L « V1/ (8 где ui 1 -(/fejXj-C -tp + Clax
хК }
м)
5
f г - L « Ч
время эксплуатации контролируемого изделия}
весовые множители, определяемые в шестой фазе цикла обучения, зависящие| от структурно-реологичес-i
ких свойств материала контролируемых изделий. При этом вторая составляющая уравнения (8) отражает вклад в потерю несущей способности объекта контроля от времени эксплуатации tp, которая зависит от его прочностных и пластических характеристик (CTr,Gg, Q) , а., третья составляющая указанного уравнения отражает изменение указанных его свойств от асимметрии нагружения объекта контроля. В указанной (пятой) фазе цикла обучения па завершающем ее этапе устанавливают в явной форме численное значение тл ДОЯ области нагружения эталонных образцов соответствующей области Гука и Кельвина, причем используют информацию о деформациях для всей совокупности эталонных образцов. Величина тпл для указанной области нагружения эталонных образцов совпадает с величиной тЛ. Указанную операцию осуществляют с использованием миниЭВМ 25.
| В последующей (шестой) фазе цик- ла обучения определяют в явной форме вид зависимости, описываемой уравнением (8)„ Для этого первоначально осуществляют нагруженив дополш тель- ных образцов обучающей выборки различных прочностных групп при следующих условиях: k{ л 1 и 0; (1,1-1,2)vk const и устанавливают по указанной совокупности деформаций, в функции от дискретов времени (t.max 30-60 мин) величину весового множителя С,, . В дальнейшем исполь зуют дополнительные эталонные образцы, принадлежащие средней прочностной группе, и осуществляют их поочередное нагружение при различных градациях асимметрии нагружения с помощью универсального стенда 23. При этом осуществляют нагружение каждого из указанной совокупности образцов только при одной градации асимметрии нагружения. В дальнейшем с помощью мини- ЭВМ 20 устанавливают величину весового множителя С.пуравнения (8). На заключительном этапе указанной фазы обучения устанавливают в явной форме параметр
-4 4/G-B)-(J ..vtp +
+ d.vkA л .tp(9)
Ј ьИ1ьп Г
при этом используют информацию- о де
формациях эталонных образцов, принадлежащих различным прочностным группам, полученных при различных режимах нагружения последних (по данным пятой и шестой фаз цикла обучения). В тестой фазе узел формирования зондирующего воздействия (электромагнитного) не функционирует. На осно- ве указанной информации с помощью миниЭВМ 20 определяют в явном виде весовые множители d 1( и d.
В седьмой фазе цикла обучения ра- J5 боту узла формирования зондирующим воздействием переводят на второй ре- шм зондирования, при этом дополнительно в отличие от первого режима намагничивания воздействуют импульс- 20 ной серией в прод.ольном направлении, соответствующей области максимальной спектральной плотности магнитных шумов Баркгаузена на интервале анализа их кратностью, равной m 3. 25 При этом амплитудные значения импульсной серии от цикла перемагничивания увеличивают на величину Дн 3/2 --
, ПРИ эт°м величину берут
30 Равной А ьэф 10-20 МПа. В отличие от режима намагничивания сменных образцов гармоническую составляющую намагничивающего тока в продольном и поперечном направлениях используют такую, при которой величина ЦЬ О (между составляющими токов в продольном и поперечном направлении). При этом узел формирования компенсационных сигналов работает, как и в пятой
дфазе цикла обучения. Результирующее электромагнитное зондирование сменных эталонных образцов обучающей выборки в продольном направлении с учетом импульсной компоненты намагничивания
.,.их формируют на основе использования контроллера 6 токов намагничивания. При э-ввм начальные условия для формирования указанной импульсной серии зондирования задаются на основе ис пользования управляющей миниЭВМ 20. На основе указанной информации, содержащейся в откликах сигналов первичного измерительного преобразователя, определяют первоначально Bs(0(-), а затем определяют и Jg(0;) при различных уровнях нагружения сменных эталонных образцов различных прочности ных групп. При этом используют дополнительные сменные эталонные образцы,
,MILO не подвергавшиеся нигружению, Иагруженпе указанных образцов осуществляют в данном режиме, как и в четвертой фазе обучения. В дальнейшем ус танавливают (с 1 омощью м нч ЗНМ 20) и явном виде зависимость составляющей J5, обусловленной реологическими полями fS , т.е., Jv C| aCi}| ) дчя эталонны: -С j/jjj Б сы ) ,т юго гор- тимента различных прочностных ipyun. Одновременно в мипиЭВМ 20, используя устатювленные зависимости, определяют тающее их производные J(;), ) при -различных градациях реоло- гических полей, вычисленных с шагом, равным Ф; 10-20 МПа.
На заключительной фазе цшсла обучения определяют явный вид реграсси- онного уравнения (5), с помощью кото- рого в режиме изменения определяют оценку остаточного ресурса времени безаварийной работы контролируемого изделия (tp5) , подвергнутого в процессе эксплуатации воздействию интен- сивных механических нагрузок. При этом используются сменные эталонные образцы различных прочностных групп, ранее не подвергавшиеся нагружению. На них поочередно воздействуют на
каждый const () в диапазоне изменения tp вплоть до разрушения последних. Каждый образец, принадлежащий одной прочностной группе, подвергают индивидуальному статичес- кому нагружению (Ј; const). Количество образцов одной прочностной группы определяется необходимым дискретом по Ј в ди-япазоне изменения ), где v& - фазовый реоло- гическкй 0 огезнйный) переход в среду Бильгама (при этом п - ). Одновременно на объект контроля воздействуют электромагнитными полями, как и в предыдущей фазе цикла обуче- ния. Узел формирования компенсационных сигналов в данной фазе цикла обучения работает, как и в предыдущей фазе цикла обучения, а узел измерения параметров магнитных шумов в данной и предыдущей фазе цикла обучения не функционирует. При этом для каждого дискрета статического нагружепия Cb - const) для сменных эталонных
изделий, принадлежащих одной прочностной группе, устанавливают в явной форме уравнение (5), осуа ествляя указанную операцию с использованием миниЭВМ 20. Указанную операцию осущесгвнягаг для тс ей совокупности прочностных групп. В резулыате этого получают систему уравнений (10), использующуюся в режиме измерения для определения величины L р :
t(;l-do)j5(o.). л5((. (fi;) i.tf;)5
1прочностная группа -7 (при
СТ,,С,(«1
. +
+ (C,0-Js(Ј|);
2прочностная группа -э (при
G(rn,G,(p(i))do)
(e)jc(fl:) +ics-j.(0,)
рз
(el:
S40(
J5 ч S
+ m;W a5(i};).J5(C;)
0 5 Q
,- 0 з ,-п
5
8 прочностная группа - (при
,
После выполнения цикла обучения исходная информация, содержащаяся в ОЗУ миниЭВЫ 20 и имитаторе 21 опорных эталонных деталей, касающаяся данного сортимента изделий, записывается в соответствующее ячейки блока 22 памяти, в которых хранится также информация но изделиям других сортиментов.
В цикле измерения устройство, реализующее предлагаемый способ,функционирует следующим образом.
Первоначально в имитатор 21 заносится вся исходная информацияXнакапливаемая в цикле обучения для деталей контролируемого ассортимента) блока 22 памяти через интерфейс 19, мультиплексор 18. При этом первоначально миниЭВМ 20 выдает управляющее слово в блок 25 управления, который в свою очередь, обеспечивает пере™ ключение мультиплексора 18 на прием информации через интерфейс 19 в имитатор 21 опорных эталонных деталей нз соответствующих разрядов блока 22. В дальнейшем в предлагаемом устройстве осуществляется калибровка, причем используется два режима работы гене- ратора 5 калиброванных сигналов. Перт вый режим работы его имитирует измере25
ние прочностных и пластических характеристик и осуществляется с использованием алгоритма по уравнению (1), а второй режим калибровки осуществля-1 ет имитацию работы предложенного устройства в режиме измерения составляющих тензора механических напряжений согласно алгоритму по уравнению (2). Применение калибровки устройства позволяет проверить правильность функционирования узлов устройства. Узел эталонного нагружения образцов в режиме измерения не функционирует.
В данном режиме используют толь- ко измерительную информацию, снимаемую с первой и второй измерительных катушек первичного измерительного преобразователя 2, которые отражают процессы намагничивания контролируемого изделия в продольном и поперечном направлениях, подвергнутого в процессе эксплуатации воздействию интенсивных .механических нагрузок.
После калибровки устройства на объект контроля воздействуют гармоническим электромагнитным полем в продольном и поперечном направлениях, причем фазовые соотношения между намагничивающими токами от одного этапа намагничивания к другому изменяют как во второй фазе цикла обучения. При этом исходная информация с измерительных обмоток первичного измери- тельного преобразователя 2 поочередно поступает через аналоговый коммутатор 3, аналого-цифровой преобразователь 4, мультиплексор 18, интерфейс 19, миниЭВМ 20. Переключение опраши- ваемой информации коммутатором 3 осуществляется блоком 25 управления и происходит в моменты времени, соответствующие переходу через нулевые значения намагничивающего Тока в про- дольном направлении. Формирование намагничивающих токов осуществляется в контроллере 6, также как и в цикле обучения во второй ее фазе. При этом первоначально определяют согласно первому этапу намагничивания (при 0) вычисление первичных оценок прочностных и пластических характеристик, а в дальнейшем вычисляют в миниЭВМ 20 с использованием соотношений (7) и (6) дискрет изменения фазы между намагничивающими токами в продольном и поперечном направлениях. Указанная информация че
5
1ю
15 2025
, 30 аа40д$50 23М26
рез интерфейс 19 передается в конт- .
55
роллер 6 токов намагничивания.
Информация о намагничивающих токах поступает на входы блока 1 намагничивания. Одновременно во всей совокупности информации, содержащейся в откликах первичного измерительного преобразователя 2, снимаемых при различных градациях (, определяют (с использованием миниЭВМ 20) вторичные оценки прочностных характеристик согласно алгоритму по уравнению (1). При этом с выходов узла формирования компенсационных сигналов подаются на первичные обмотки преобразователей блока 15 напряжения, равные нулю. tHa этом первая фаза цикла измерения завершается.
Во второй фазе цикла измерения узел формирования компенсационных сигналов функционирует так же, как он работает в четвертой фазе цикла обучения. С помощью миниЭВМ 20 определяют первоначально первичные оценки {;« и ьгг , а затем, определив с помощью алгоритма (3) величину с, } определяют уточненные их вторичные оценки (ф 22 ()« В дальнейшем с использованием миниЭВМ 20 первоначально вычисляют величину параметра тЈ, а затем и численное значение оценки . В дальнейшем работу предлагаемого устройства переводят в третий режим цикла измерения. При этом согласно вычисленным в миниЭВМ 20 вторичным оценкам прочностных и пластических характеристик контролируемого изделия определяют в ней также величину кл, а затем указанная информация передается через интерфейс 19 в контроллер 6 токов намагничивания. В последнем осуществляется расчет параметров импульсной серии, а затем и параметров результирующего тока в продольном аправлеЧ нип во втором режиме намагничивания в различных циклах перемагничивания контролируемого изделия. В .дальнейшем в миниЭВМ 20 определяют первоначально BS(Q), а затем Js(-,) ,is (Ј.) ). На заключительном этапе по совокупности вычисленных вто- ричных оценок прочностных и пластических характеристик объекта контроля определяют прочностную группу (п 8), а затем из системы уравнений выбирают уравнение, принадлежащее установленной прочностной группе,
например третьей, решают его и определяют оценку остаточного ресурса времени безаварийной эксплуатации контролируемого изделия. Данные о
степени изменения интенсивности магнитных шумов используютсялв режиме изл л
мерения при определении
i
22
при этом при их измерении узел измерения параметров магнитных шумов работает, как в пятой фазе цикла обучения. После определения изме рения завершается и осуществляется ; мерение t0-периодически во времени.
-pv
1
Ф
о р м у л а изобретения 1. Способ контроля физико-м гх.т- нических свойств ферромагнитных изд..- лий заключающийся в том, что на KOHJ- ролируемое изделие воздействуют в продольном направлении гармоническим магнитным полем и регистрируют спектральные составляющие Уолша различной кратности сигнала отклика первичного измерительного преобразователя (ПИП) и по совокупности информативных гармонических составляющих ПИП определяют оценки физико-механических характеристик ферромагнитных изделий, отличающийся тем, что, с целью расширения области применения за счет контроля величины остаточного ресурса tp ,- времени эксплуатации контролируемых ферромагнитных изделий и определения остаточной эксплуатационной прочности г дп , в первом режиме намагничивания на контролируемое изделие воздействуют электромагнитным гармоническим полем в поперечном направлении, при этом фазовое соотношение между намагничивающими токами в продольном и поперечном направлениях устанавливают таким образом, что в
COal(f,T) - спектральная составляющая Уолша, в отсутствии фона, вносимого вариацией структуры в отклик сигнала ПИП, во втором режиме намагничивания в продольном направлении
каждом последующем периоде перомагни- 45 ВОЗдейСтвуют дополнительно импульсчивания контролируемого изделия указанную фазу увеличивают на постоянную величину, кратную периоду пере- магничивания контролируемого ферромагнитного изделия, при о гом регистрируют спектральные составляющие отклика сигналов ПИП и вычисляют оценки прочностных и пластических характеристик контролируемого изделия
к
GT
20
|Lalf,CO aUk(T); а2т.ы аНи/Г);
ной серией с амплитудными напряжен- ностями магнитных полей, соответству ющими области максимальной спектраль ной плотности магнитных шумов Бзрк50 гаузена, причем изменения амплитуд- ного значения импульсной серии от цикла перемагничивания к последующему циклу устанавливают таким, что обеспечивают изменения воздействия
55 магнитного поля на объект контроля на величину, равную
tf,
4 rf 3/2 Т
Э.
so
и
ZLa
n
U al(n,T) ,
0
где а.; - коэффициент разложения по
функциям Уолша; CaalCkjT), foal (m Т),
(Wal(n(T) - спектральные составляющие Уолша; М - целые числа;
- период возбуждения, вносимый вариацией структуры в отклик сигнала ПИП, используя ранее определенные зависимости выходных сигналов ПИП от величины Cfr , GJ, и Ц , определяют первоначально оценки составляющих Чс it тензора абсолютных реологических напряжений в объекте контроля
1 Чо aag G3al(k,T);
К, N, Т исключают фон,
Л
Ц,
г-1.
л
LZ1 а
50
bt
a.tOaKf ,Т)
а затем величину эффективного напряжения ЈЭЈр и fon
0
0
г
т
-Л«г
11
Јг
сгг
;
х ехр
где
тЈ v
k-M
Ф mt
А illJSZ-Y
ь-СЗт
структурно-реологический параметр объекта контроля; величина фазового реологил.
Г -ХИ-м П I
ческого перехода из среды ь Кельвина в среду Максвелла; (Ual()
COal(f,T) - спектральная составляющая Уолша, в отсутствии фона, вносимого вариацией структуры в отклик сигнала ПИП, во втором режиме намагничивания в продольном направлении
5 ВОЗдейСтвуют дополнительно импульсной серией с амплитудными напряжен- ностями магнитных полей, соответствующими области максимальной спектральной плотности магнитных шумов Бзркгаузена, причем изменения амплитуд- ного значения импульсной серии от цикла перемагничивания к последующему циклу устанавливают таким, что обеспечивают изменения воздействия
магнитного поля на объект контроля на величину, равную
tf,
4 rf 3/2 Т
где ut эф const;
J - намагниченность насьпцения;
Д - магнитострикционная насыщения контролируемого изделия регистрируют спектральные составляюшие откликов ПИП в базисе ортогональных функций Уолша на различных интервалах анализа и по их совокупности первоначально определяют величину и знак производных намагничен- ности изделия и J а затем и
оценку величины tp dJ (t) + KJ(/, +
+ mJ(fv J(Јj, причем весовые множители id, k, m устанавливают в цикле обуче |ния из условия минимальной дисперсии ошибки измерения t рэ .
1
2. Устройство для контроля физико-механических свойств ферромагнитных изделий, содержащее последовательно соединенные блок намагничивания, блок первичных измерительных преобразователей, коммутаторов, второй вход которого соединен с выходом блока намагничивания, и аналого-цифровой преобразователь, генератор калибровочных сигналов, вход которого соединен с третьим входом коммутатора, и контроллер тока намагничивания, выход которого подключен к входу блока намагничивания, отличающееся тем, что, с целью повышения точности контроля, оно (снабжено блоком тензометрических датчиков, выход которого соединен с четвертым входом коммутатора, узлом измерения параметров магнитных шумов, состоящим из последовательно соединенных фильтра верхних частот, вход которого подключен к выходу коммутатора, нормализатора импульсов и измерителя интенсивности скачков Барк- гаузена, а также блока управления кратностью, выход которого подключен к второму входу измерителя интенсивности скачков Баркгаузена, узлом формирования компенсационных сигналов, состоящим из последовательно соединенных блока буферной памяти,
первого цифроаналогового преобразователя, первого блока согласования и блока компенсационных преобразова- ,- телей, подключенного к блоку первичных измерительных преобразователей, а также последовательно соединенных второго цифроаналогового преобразователя, вход которого подключен к
Q выходу блока буферной памяти и второго блока согласования, подключенного к второму входу блока компенсационных преобразователей узлом вычислений, состоящим из последовательно
5 соединенных мультиплексора, входы которого соответственно подключены к выходу аналого-цифрового преобразователя, второму выходу контроллера тока намагничивания, к выходу измери0 теля интенсивности скачков Баркгаузена, интерфейса и миниЭВМ, имитатора опорных деталей, вход которого соединен с вторым выходом интерфейса, а выход - с входом блока буферной памя5 ти и с четвертым входом мультиплексора второго блока памяти, вход которого подключен к второму выходу интерфейса, а выход - к пятому входу мультиплексора, узлом эталонного
Q нагружения, состоящим из последовательно соединенных универсального стенда, вход которого соединен с вторым выходом интерфейса, а второй выход - с шестым входом мультиплексора, и контроллера управления стендом, а также блоком управления, вход которого соединен с третьим выходом интерфейса, а выходы соответственно соединены с входом контроллера тока
д намагничивания, с вторым входом универсального стенда, с пятым входом коммутатора, с четвертым входом измерителя интенсивности скачков Баркгаузена, с входом блока управления
кратностью, с вторым входом имитатора опорных деталей, второй выход интерфейса подключен к второму входу контроллера тока намагничивания, а выход блока намагничивания соединен
Q с пятым входом измерителя интенсивности скачков Баркгаузена.
/ иД е
ie

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля физико-механических показателей ферромагнитных изделий и устройство для его осуществления | 1985 |
|
SU1325347A1 |
| Способ контроля физико-механических параметров ферромагнитных изделий и устройство для его осуществления | 1987 |
|
SU1532863A1 |
| Устройство многопараметрового контроля физико-механических показателей ферромагнитных изделий | 1984 |
|
SU1379711A1 |
| Способ многопараметрового электромагнитного контроля ферромагнитных изделий и устройство для его осуществления | 1985 |
|
SU1288579A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕХАНИЧЕСКИХ НАПРЯЖЕНИЙ И МАГНИТОУПРУГИЙ ДАТЧИК ДЛЯ ОПРЕДЕЛЕНИЯ МЕХАНИЧЕСКИХ НАПРЯЖЕНИЙ | 1992 |
|
RU2073856C1 |
| Способ контроля механических свойств металлопроката, изготовленного из ферромагнитных металлических сплавов и устройство для его осуществления | 2023 |
|
RU2807964C1 |
| Устройство для определения товарной сортности табачного сырья | 1984 |
|
SU1275287A1 |
| Способ неразрушающего контроля ферромагнитных материалов на основе эффекта баркгаузена | 1977 |
|
SU726477A1 |
| Способ измерения остаточных и приложенных напряжений в ферромагнитных изделиях и устройство для его осуществления | 1985 |
|
SU1474537A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПРОЧНОСТНЫХ ХАРАКТЕРИСТИК НАСОСНЫХ ШТАНГ НЕФТЕДОБЫВАЮЩИХ СКВАЖИН | 2014 |
|
RU2572402C1 |
Изобретение относится к измерительно-информационной технике. Цель изобретения - расширение области применения. Цель достигается тем, что в предложенном способе на контролируемое изделие воздействуют в продольном и поперечном направлениях гармоническим магнитным полем таким образом, что в каждом последующем периоде перемагничивания контролируемого изделия указанную фазу увеличивают на постоянную величину, кратную периоду перемагничивания контролируемого ферромагнитного изделия, при этом регистрируют спектральные составляющие отклика сигналов первичного измерительного преобразователя (ПИП) и определяют, используя их совокупность, прочностные и пластические характеристики. В дальнейшем, исключая фон, вносимый вариацией структуры в отклики сигналов ПИП, определяют первичные оценки составляющих тензора механических напряжений, величины остаточной эксплуатационной прочности объекта контроля. Устройство содержит блок компенсационных преобразователей, блок тен-1 зометрпческих датчиков, мультиплексор блок памяти, имитатор опорных деталей узел эталонного нагружения образцов, состоящий из универсального стенда, . контроллера управления стендом, узел измерения параметров магнитных шумов, состоящий из фильтра верхних частот, нормализатора импульсов, измерителя интенсивности скачков Барк- гаузена и блока управления кратности а также узел формирования компенсационных сигналов5 состоящий из буферной памяти, цифроаналоговьтх преобразователей и согласующих устройства. 2 с.п. ф-лы, 3 ил-. о Ш о Јь ГО со С& со
iC
ТУ
ин-в
Фнг,2
Редактор М. Циткина
Составитель И.Рекунова Техред Л.ОлиЙнык
Вых i
ЧРиг. 3
Корректор А. Обручар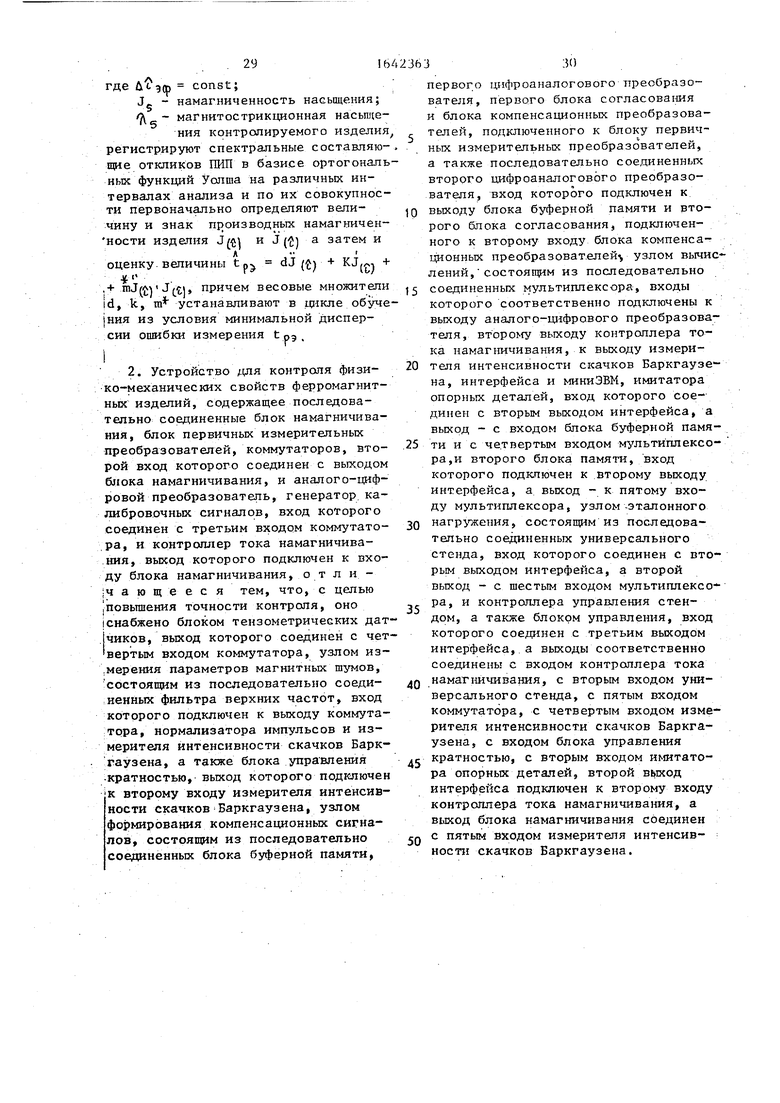
| Способ многопараметрового электромагнитного контроля ферромагнитных изделий | 1981 |
|
SU978029A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство контроля физико-механических показателей ферромагнитных изделий | 1981 |
|
SU1128156A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ,(54) СПОСОБ КОНТРОЛЯ ФИЗИКО-МЕХАНИЧЕСКИХ СВОЙСТВ ФЕРРОМАГНИТНЫХ ИЗДЕЛИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | |||
