Изобретение относится к области прикладной геофизики и может быть использовано для создания свип-сигнала сейсмическим источником.
Известна конструкция вибровозбудителя с регулируемым дебалансом сейсмического вибратора [1] , включающая приводной двигатель, соединенный с регулируемым дебалансом и систему управления величиной эксцентриситета.
В этой конструкции раскрученный до максимальной скорости вращения дебаланс сам уменьшает число оборотов, если позволит поршню увеличивать эксцентриситет. Это облегчает режим отслеживания задаваемых программой частоты и фазы, т. е. получения программного даун-сигнала.
Основными недостатками такого устройства для получения свип-сигнала с постоянной амплитудой силы являются жесткая взаимосвязь между частотой вращения и величиной эксцентриситета дебаланса, что значительно снижает диапазон перекрытия частот (т. е. соотношение между минимальной и максимальной частотой свип-сигнала), узкий диапазон частот, на котором можно получить амплитуды силы, существенно отличающиеся друг от друга без изменения конструкционных параметров вибровозбудителя. Указанные особенности усложняют реализацию программного управления разверткой частоты при заданном темпе изменения частоты, что ухудшает качество регулирования и снижает точность отработки свип-сигнала.
Наиболее близким по технической сущности к изобретению является скважинный источник сейсмических колебаний [2] , состоящий из наземного и скважинного блоков и содержащий источник гидравлической энергии питания, электродвигатель с насосом, гидропневмоаккумуляторы с гидромотором, объемный пульсатор, обратный клапан, тормоз, маховик и упругий излучатель, а скважинный блок снабжен герметичным корпусом, в который введен механизм компенсации внешнего давления, соединенный через дроссель с внутренней полостью объемного пульсатора, внешняя полость которого соединена с упругим излучателем, электродвигатель с насосом, всасывающая полость которого соединена с гидроаккумулятором, нагнетательная полость через обратный клапан - с вторым гидропневмоаккумулятором, гидропневмоаккумуляторы связаны с гидромотором, соединенным с объемным пульсатором, а электродвигатель через гермоввод и каротажный кабель соединен с источником питания.
Основными недостатками такого источника сейсмических колебаний являются следующие: невозможность управления разверткой частоты и ее коррекции, что снижает качество регулирования динамической системы источник колебаний - упругий излучатель (исполнительный механизм), снижение функциональных возможностей из-за невозможности использовать некоторые системы для приема сейсмического свип-сигнала, так как получаемый сигнал нерегулируемый.
Цель изобретения - повышение точности отработки сигнала и расширение функциональных возможностей за счет обеспечения управления разверткой частоты и ее коррекции.
Поставленная цель достигается тем, что гидравлический вибровозбудитель для получения свип-сигнала включает маховик, гидромотор, источник гидравлической энергии, золотник, объемный пульсатор, исполнительный механизм, выполненный в виде упругого излучателя, причем величина момента инерции маховика регулируется системой управления.
Предлагаемая конструкция позволяет корректировать темп изменения частоты вибровозбудителя до величины, задаваемой системой управления за счет управления величиной момента инерции маховика.
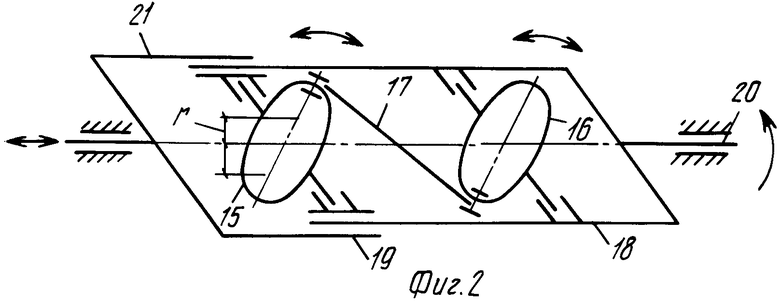
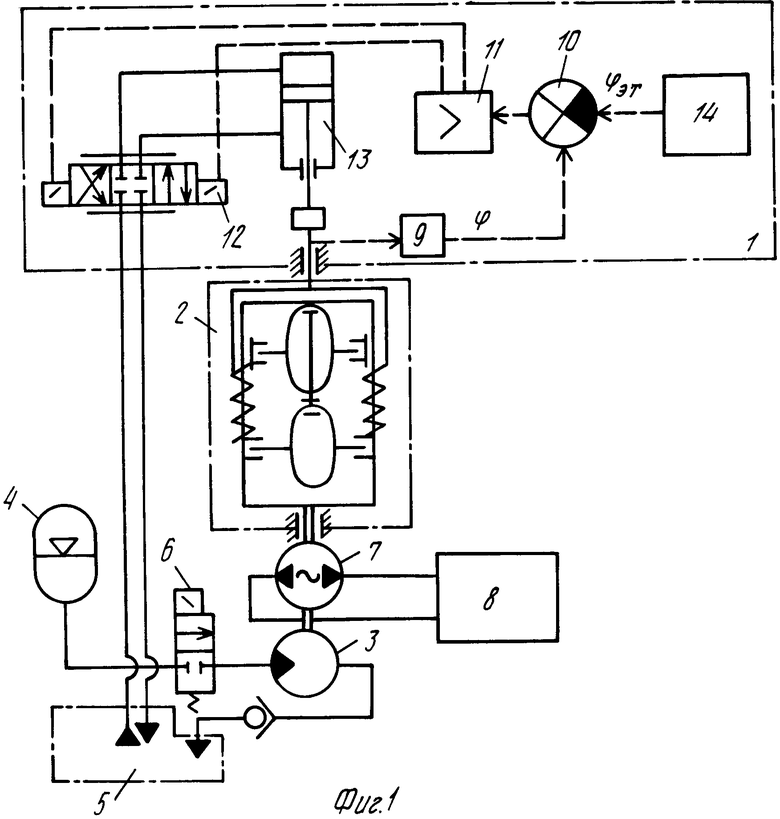
На фиг. 1 показан вибровозбудитель для получения свип-сигнала; на фиг. 2 - кинематическая схема маховика с переменным моментом инерции.
Гидравлический вибровозбудитель для получения свип-сигнала включает систему 1 управления величиной момента инерции на валу гидромотора 1, маховик 2 с переменным (управляемым) моментом инерции, вращаемый гидромотором 3, который соединен через гидромагистрали и коммутирующий золотник 6 с гидроакумулятором 4, а также источник 5 гидравлической энергии, соединенный с гидроаккумулятором. На валу, соединенном с гидромотором 3 и управляемым маховиком 2, находится гидрообъемный пульсатор 7, генерирующий переменный поток жидкости в исполнительный механизм, выполненный, например, в виде эластичной упругой оболочки.
При такой конструкции обеспечивается максимальный КПД излучаемой источником энергии.
Система управления содержит датчик 9 углового текущего положения ϕ, блок 10 сравнения текущего положения с эталонным ϕэт, усилитель 11 мощности, сервозолотник 12, гидроцилиндр 13, программоноситель 14, задающий темп изменения частоты или угловое положение вибропривода во времени ϕэт.
Программоноситель может быть выполнен, например, в виде задающего генератора, реализующего необходимый закон изменения угла.
Кинематическая схема маховика с регулируемым (управляемым) моментом инерции I = f(ϕэт) приведена на фиг. 2 и включает в себя звенья 15, 16, выполненные в виде дисков, связанных тягой 17, при этом звено 16 имеет неподвижную опору 18, а звено 15 подвижную опору 19. Вся конструкция маховика с переменным моментом инерции вращается вокруг оси 20 и включает толкатель 21.
Устройство работает следующим образом. После зарядки гидроаккумулятора 4 до заданного давления Ро от источника 5 гидравлической энергии включается золотник 6, коммутирующий гидромотор 3 с гидропневомаккумулятором 4. Возникший на валу гидромотора постоянный крутящий момент Мо = Ро Ψ (Ψ - характерный объем гидромотора) разгоняет маховик и пульсатор с темпом, определяемым инерционно-диссипативными параметрами системы маховик-пульсатор-упругий излучатель, т. е. величиной маховой массы маховика 2, коэффициентом трения в системе, а также характером внешней нагрузки, действующей на привод через пульсатор 7 от упругого излучателя 8.
Указанный темп разгона фиксируется в виде сигнала от датчика 9 текущего положения и сопоставляется с эталонным сигналом. Если величины указанных сигналов совпадают, то управляющих воздействий на маховик от усилителя 11 мощности не формируется. Если темп разгона вибровозбудителя ϕ оказывается отличным от заданного программоносителем ϕэт, т. е. d2ϕ/dt2 ≠ d2 ϕэт/dt2, то формируется сигнал, пропорциональный разности Δϕ= ϕ- ϕэт, поступающий через усилитель мощности 11, на сервозолотник 12, что соответственно вызывает смещение штока гидроцилиндра 13 в сторону, определяемую знаком Δϕ. При этом гидроцилиндр, воздействуя на толкатель 21 маховика изменяет момент инерции последнего за счет поворота вокруг своих опор-звеньев 15 и 16 и соответственно изменения радиуса-вектора r от центра масс звеньев до оси 20 вращения.
Вследствие изменения момента инерции I = Io ±Δ I возникает дополнительный крутящий момент ΔM ≈ d2 Δϕ/dt2, который ускоряет или замедляет темп разгона (изменения частоты) вибровозбудителя до величины, определяемой программным темпом разгона.
Предлагаемое устройство позволяет повысить точность сеймсмических исследований, а также расширяет функциональные возможности сейсмического источника. (56) 1. Егоров Г. В. и др. Вибровозбудитель с регулируемым дебалансом для сейсмического вибратора. Сб. науч. трудов ИГ и ГСОАН СССР - Техника и методика вибрационного возбуждения и регистрации сейсмических волн. Новосибирск, 1987, с. 172.
2. Авторское свидетельство СССР N 1681289, кл. G 01 V 1/135, 1991.
| название | год | авторы | номер документа |
|---|---|---|---|
| Скважинный источник сейсмических колебаний | 1989 |
|
SU1681289A1 |
| ВИБРОИМПУЛЬСНЫЙ ИСТОЧНИК СЕЙСМИЧЕСКИХ СИГНАЛОВ | 2000 |
|
RU2171479C1 |
| ИСТОЧНИК СЕЙСМИЧЕСКИХ СИГНАЛОВ | 2010 |
|
RU2436128C1 |
| Способ генерации вибросейсмического сигнала в скважине и устройство для его осуществления | 1990 |
|
SU1787277A3 |
| ВИБРОИМПУЛЬСНЫЙ ИСТОЧНИК ЭНЕРГИИ | 2003 |
|
RU2240582C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ ВИБРАЦИОННЫХ КОЛЕБАНИЙ ДЛЯ ПРОВЕДЕНИЯ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ И ДЕБАЛАНСНЫЙ ВИБРОВОЗБУДИТЕЛЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2387488C1 |
| ВИБРОИМПУЛЬСНЫЙ ИСТОЧНИК | 2006 |
|
RU2324954C1 |
| СПОСОБ ВИБРАЦИОННОЙ СЕЙСМОРАЗВЕДКИ | 2014 |
|
RU2570587C1 |
| Устройство для вибрационного возбуждения сейсмических волн | 1989 |
|
SU1778719A1 |
| ОБЪЕМНЫЙ ГИДРОПРИВОД ВЫГРЕБНОЙ ЦЕПИ ПУТЕВОЙ ЩЕБНЕОЧИСТИТЕЛЬНОЙ МАШИНЫ | 2003 |
|
RU2235161C1 |
Использование: возбуждение свип-сигнала сейсмическим источником. Сущность изобретения: гидравлический гидровозбудитель для получения сейсмического свип-сигнала включает источник гидравлической энергии, гидропневмоаккумулятор, гидромотор, золотник, гидрообъемный пульсатор, маховик, установленный на валу гидромотора, и исполнительный механизм, выполненный в виде упругого излучателя, при этом маховик выполнен с регулируемым моментом инерции и связан с системой его управления. Маховик содержит два соосно установленных на раме диска, связанных между собой тягой, один из которых имеет подвижную опору, а другой - неподвижную, причем маховик связан с системой управления посредством толкателя. Система управления содержит датчик углового положения маховика, блок сравнения текущего угла с эталонным, усилитель мощности, сервозолотник, гидроцилиндр, программоноситель, задающий изменение угла, причем гидроцилиндр связан с толкателем маховика. 2 з. п. ф-лы, 2 ил.
