Изобретение относится к телемеханике и предназначено для централизованного дистанционного контроля и управления объектами контролируемых пунктов (КП), расположенных вдоль линии связи. Оно может использоваться в системах охраны, для контроля состояния трубомагистралей, в системах контроля за вождением машин по определенным трассам и т. д.
Широко известны системы телемеханики с применением способов разделения сигналов [1] , позволяющих осуществить управление по двухпроводной линии связи.
Известны также устройства определения адресов объектов, сосредоточенных вдоль линии связи [2] .
Известные устройства сложны и в отдельных случаях неудобны в эксплуатации. Сложность их состоит в содержании надстройки при уплотнении линии связи, т. е. в наличии генераторов импульсов, устройств синхронизации импульсов, блоков сброса, элементов И и т. д. на каждом КП. Линия связи излишне перегружена синхронизирующими, контрольными, адресными и иными импульсами, что ведет к сокращению надежности передачи или к увеличению аппаратуры и времени передачи полезной информации в сообщении. Неудобство эксплуатации в этих системах заключается в изменении кода адреса при перестановке аппаратуры из одного КП в другой.
Наиболее близким к изобретению является способ передачи и приема информации о состоянии КП, заключающийся в формировании сигнала запроса на пункте управления (ПУ), передаче его на все КП, приеме на первом КП, формировании ответного сигнала и передача его на ПУ на заданном временном интервале передачи [1] .
Цель изобретения состоит в увеличении объема передаваемой информации с использованием общей линии связи и улучшении качества контроля за состоянием линии связи без существенного увеличения аппаратуры в КП и на ПУ, так и с КП к ПУ обеспечивается введением выборочного управления.
Способ может быть осуществлен устройством в виде телемеханической системы.
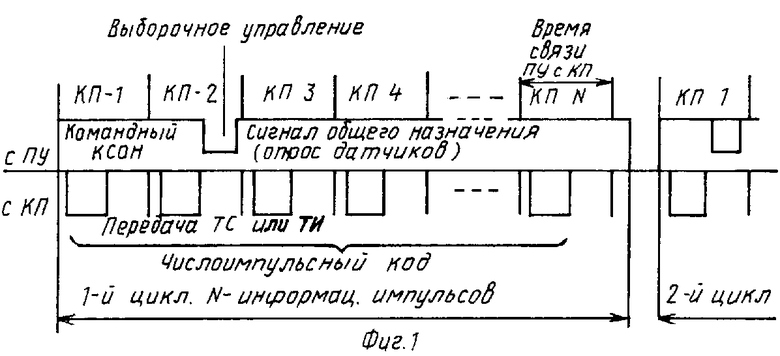
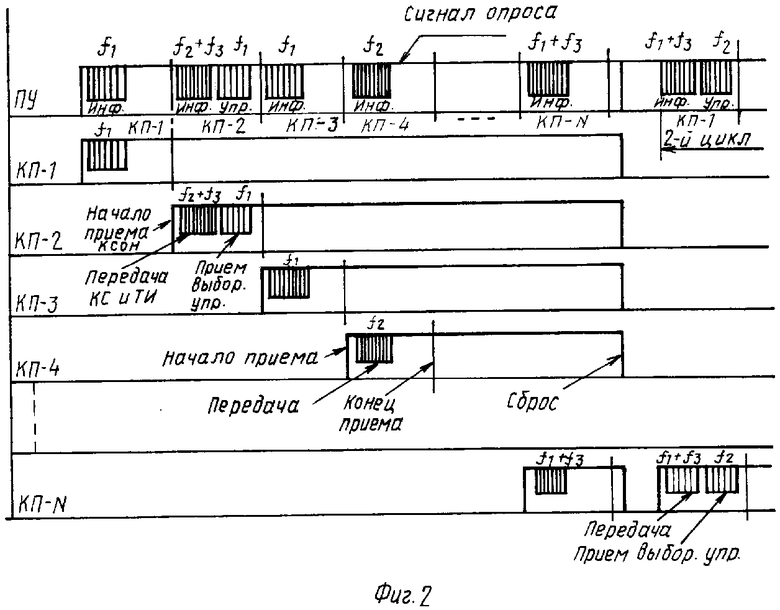
Способ поясняется структурой передаваемых сигналов в системе на фиг. 1 и диаграммами прохождения сигналов на фиг. 2 с вариантом подачи командного сигнала общего назначения с признаком обтекания линии постоянным током, который одновременно используется в качестве источника электрической энергии для аппаратуры КП; на фиг. 3 - функциональная схема системы.
Система содержит ПУ 1 и КП 2, расположенные вдоль линии связи 3. На каждом КП имеются элемент 4 выдержки времени, передатчик 5 с подключенными к нему датчиками 6 и линейный коммутатор 7, через замыкающие контакты а, b которого участок линии связи 3 последующего КП соединен с предыдущим участком линии связи, а на ПУ расположены передатчик, выполненный в виде источника 8 питания, соединенный через ключи 9 управления с линией связи 3, приемник 10 и средство воспроизведения, включающие элементы 11 сигнализации.
Система, реализующая способ, работает следующим образом.
Для передачи информации между КП и ПУ с момента получения командного сигнала общего назначения (сигнала запроса) до момента его передачи в последующий КП элемент 4 выдержки времени соединен входом с линией связи 3 ПУ через контакты а, с линейного коммутатора 7, управляющий вход которого соединен с последним по выдержке времени выходом элемента 4, тогда как его первый выход соединен с управляющим входом передатчика 5, соединенного через линию связи 3 с ПУ. Такая электрическая связь на КП обеспечивает и выдержку времени, и обособленное подключение любого КП к линии связи. При этом адрес КП, с которым автоматически устанавливается индивидуальная связь в момент передачи командного сигнала общего назначения из одного КП в другой, определяется считыванием числоимпульсного кода приемником 10 ПУ, снабженного средствами телемеханики, в данном случае счетчиком-распределителем 12, со средствами блока 13 элементов индикации и селектором 14, соединенных так, что селектор 14 подключен к выходу приемника 10, а выходами к элементам 11 сигнализации и к входам счетчика-распределителя 12.
На каждом КП 2 установлен приемник 15, для выборочного управления исполнительными элементами объекта 16, соединенный с линией связи 3 ПУ 1 через ключ 17, который может входить в состав коммутатора 7. На ПУ для формирования командных сигналов используются шифратор 18 и коммутатор 19, соединенный входами с выходами счетчика-распределителя 12 и выходом с входом элемента И 20, второй вход которого соединен через инвертор (элемент согласования) 21 со счетным с входом счетчика-распределителя 12, при этом шифратор 18, включенный в линию передачи командных сигналов, соединен входами с ключами 9 управления, а элемент И 20 выходом соединен с управляющим входом шифратора 18 для разрешения передачи команд выборочного управления.
Система снабжена на ПУ блоком 22 регистрации, подключенным входами адресной записи к выходу счетчика-распределителя 12, входом разрешения записи к выходу селектора 14 и входами считывания и установки нуля к ключам 9 управления, а выходами к блоку 23 адресного воспроизведения записанной информации. Для повышения достоверности принимаемой информации и упрощения аппаратуры приемник 10 ПУ подключен к линии связи 3 через ключ 24, управляющий вход которого соединен с выходом элемента И 20.
С целью исключения умышленной блокировки КП, например, в системах охраны, т. е. с целью повышения достоверности информации о состоянии линии связи и полученной информации с объектов, применяют режим разделения сигналов от двух соседних КП, для чего на КП с четным номером (по мере удаления его от ПУ) формируют признак информационного (ответного) сигнала одного вида, а для нечетных КП - другого. Это может достигаться, например, различным временем включения передатчика 5 на передачу при установке выдержки времени элементом 4 или изменением параметра выходного сигнала датчика 25, предназначенного для специальной подачи контрольного информационного сигнала через передатчик 5 в линию связи 3.
Подачу командного сигнала общего назначения с ПУ 1 для всех КП 2, например, для проверки состояния датчиков и линии связи 3 осуществляют путем включения в линию связи 3 источника 8 питания одним из ключей 9 управления. Через контакты а и с линейного коммутатора 7 первого КП командный сигнал поступает на вход элемента 4 выдержки времени, который включается в работу, и на его первом выходе появляется сигнал управления, включающий передатчик 5 на передачу информации. Если на одном из элементов объекта 16 не произошло никаких изменений, то передатчик сообщает контрольную информацию с датчика 25 в виде сигнала сообщения с определенным признаком. В данном случае носителем сигнала является командный сигнал общего назначения в виде постоянного тока, как показано на фиг. 1, 2, и передатчик 5 осуществляет лишь модуляцию этого сигнала, которая принимается на ПУ 1 приемником 10, фильтруется, усиливается до определенного уровня и подается на селектор 14, где проходит качественную селекцию по признаку датчика 25 и в форме электрического импульса поступает на вход соответствующего элемента 11 сигнализации и на счетный вход с счетчика-распределителя 12. Счетчик-распределитель при помощи блока 13 элементов фиксирует номер КП, а соответствующий сигнальный элемент 11 отображает вид принятой информации, что свидетельствует о состоянии целостности тракта приема и передачи информации до первого КП в полном объеме. С истечением времени передачи элемент 4 выдержки времени включает передатчик 5 и, если с ПУ нет приема командного сигнала для выборочного управления, то после выдержки времени с последующего выхода элемент 4 подает командный сигнал на управляющий вход коммутатора 7, который срабатывает и становится на самоблокировку. В данном случае блокировка осуществляется через линию связи источником 8 питания. Участок линии связи ПУ отключается от приемной аппаратуры первого КП и подключается контактами а, b коммутатора 7 к участку линии связи 3 следующего КП, т. е. второго КП. Так как командный сигнал общего назначения (источник 8) не отключался, то сигнал через контакты а и с коммутатора 7 следующего (второго) КП поступает на вход элемента 4 выдержки времени, который включается в работу и включает передатчик 5. Если на объекте произошло нарушение (изменение состояния объекта), то датчик 61 совместно с датчиком 25 образует кодовую комбинацию известительного сигнала и через передатчик 5 передает его к ПУ. Так как приемник 15 первого КП отключен, то эта информация принимается только приемником 10 на ПУ и после обработки подается на селектор 14, в котором кодовая комбинация сигналов датчиков 61 и 25 расшифровывается по качественным признакам (например, по частоте, фазе, полярности, длительности импульса и т. д. ), преобразуется в электрические импульсы, которые поступают на соответствующий элемент 11 сигнализации (для звукового и светового воспроизведения), на счетный вход с счетчика-распределителя 12, на блок 13 элементов индикации и на адресные входы записи блока 22 регистрации. Блоком 22 система может комплектоваться при необходимости хранения записи о нарушениях в объектах. Разрешение записи осуществляется при наличии сигнала нарушения на объекте, поэтому выход селектора 14 для звуковой, световой сигнализации соответствующего элемента 11 соединен с входом разрешения "Запись". Записанная информация при нажатии соответствующей кнопки или включении тумблера "Считывание" (ключи 9 управления на ПУ) обеспечивает выдачу информации на блок 23 адресного воспроизведения информации. В данном случае ячейка, соответствующая элементу индикации второго КП, включается и воспроизводится адрес соответствующего датчика 61. С истечением времени передачи элемент 4 выключает передатчик 5 и при отсутствии командного сигнала выборочного управления с ПУ после выдержки времени переключает линейный коммутатор 7. Участок линии связи 3 ПУ отключается от приемника второго КП и подключается к участку линии связи третьего КП. Такой опрос датчика и линии связи всех КП происходит автоматически до последнего КП. Если в линии связи обнаружится обрыв линии или короткое замыкание, то опрос прекращается и на ПУ селектор 14 не подает сигналов информации, счетчик-распределитель 12 останавливается, в блоке 13 элементов индикации высвечивается номер того КП, с которого была принята информация перед обнаруженной неисправностью. При коротком замыкании линия связи перегружается, на ПУ срабатывает токовое реле, его сигнал воспроизводится в элементах 11 сигнализации, что дает отличительный признак от обрыва линии, при этом элементы индикации блока 13 указывают, как и при обрыве линии, номер КП. От перегрузки линии срабатывают ключи 9 управления, приводящие к включению сигнализации, оповещающей о месте неисправности. При повторном запуске системы и опросе, даже если не устранена неисправность в линии связи, весь цикл передачи и приема информации повторяется.
Для системы охраны объектов недостаточно обнаружения нарушения в определенном исполнительном элементе объекта 16 соответствующего КП или умышленного повреждения линии, необходимо предотвратить блокирование линии связи какого-либо КП, т. е. возможность перемыкания КП в месте его подключения. Для обнаружения места блокировки соответствующего КП применяют режим, при котором во всех четных номерах КП датчикам 25 устанавливают один признак контрольного информационного сигнала, например задают частоту колебаний f1, а для всех нечетных КП - частоту f2, тогда при опросе датчиков всех КП, как уже было описано выше, приемник 10 ПУ благодаря селектору 14 ПУ принимает информационную последовательность только с чередующимися признаками частот f1 и f2. Если блокируют КП с частотой датчика f2, то на ПУ проходит последовательность числоимпульсного кода с частотами f2 в двух импульсах подряд. Такая информация не принимается селектором 14 и на вход счетчика-распределителя 12 не подается сигнал счета или дается сигнал запрета счета, срабатывают элементы 11 сигнализации, а элементы индикации блок 13 указывают на место блокировки объекта. То же происходит и с блокировкой объекта КП с частотой f2. Кроме того, любая блокировка при опросе датчиков обнаруживается при считывании всех датчиков КП при помощи элементов индикации блока 13. Отчет неполного числа объектов, взятых под контроль в линии, всегда предупреждает о нарушении.
Для выборочного управления исполнительными элементами объекта 16 в цикле информационной последовательности числоимпульсного кода подают командный сигнал. Такой командный сигнал может иметь лишь один признак сигнала для всех одноименных объектов всех КП, но подается он в выбранный КП на такте получения из него информационного сигнала. Такой командный сигнал формируется при помощи ключей 9 управления и шифратора 18. Например, во втором КП необходимо отключить исполнительный элемент под номером пять в объекте 16 и включить под номером два (на фиг. 3 показан только один объект 16, состоящий из нескольких исполнительных элементов). Тогда второй ключ 9 выборочного управления ставят в положение включить, а пятый ключ - в положение выключить. В шифраторе 18 устанавливается соответствующая кодовая комбинация сигнала управления для передачи. При помощи коммутатора 19 и ключей 9 управления второй выход счетчика-распределителя 12 подключается к первому входу элемента И 20. После такой подготовительной операции осуществляют режим опроса датчиков. Опрос датчиков проходит в последовательности, описанной выше. С получением ответного сигнала из второго КП на втором выходе счетчика-распределителя 12 (с приходом второго тактового импульса) появляется сигнал, который поступает через коммутатор 19 на вход элемента И 20. С истечением времени передачи во втором КП передатчик 5 выключается и на счетном входе с счетчика-распределителя 12 образуется сигнал низкого логического уровня, который инвертируется инвертором 21 в высокий уровень, и на выходе элемента И 20 появляется сигнал управления, который поступает на вход управления шифратора 18 и на управляющий вход ключа 24. Приемник 10 отключается от линии связи, а с шифратора 18 в линию связи передается информация выбранных команд. Так как к этому времени установлена связь только с вторым КП (первый КП после опроса отключился, а последующие еще не подключились), то вся информация поступает через ключ 17, включенный после отключения передатчика 5, на вход приемника 15, где расшифровывается и подается на соответствующие исполнительные элементы для включения второго исполнительного элемента объекта 16 и выключения пятого исполнительного элемента. С концом принятия командной информации на управляющий вход линейного коммутатора 7 с последующего выхода элемента 4 выдержки времени подается сигнал, который отключает участок линии связи 3 ПУ от приемника 15 второго КП и подключает его к участку линии связи третьего КП. Для выборочного управления исполнительными элементами объекта 16 другого КП необходимо провести перечисленные операции повторно.
Система управления может обеспечивать дежурный режим работы, например, при охране объектов, при этом не требуется каких-либо дополнительных устройств, достаточно лишь, чтобы датчик 62 при наличии на нем сигнала включал передатчик 5 на передачу. В дежурном режиме, когда после опроса всех датчиков к линии связи 3 подключены все передатчики КП, наличие информации на датчике 6 какого-либо КП передается по общей линии связи к ПУ. Принятая информация, пройдя качественную селекцию в селекторе 14, вызывает срабатывание элемента 11 сигнализации, от которого автоматически (или оператором) осуществляется опрос датчиков, при котором линия связи сначала обесточивается, все коммутаторы 7 КП приходят в исходное состояние и после подачи командного сигнала общего назначения начинается адресный опрос датчиков всех КП, как было описано выше. При включении номера КП, из которого пришел аварийный или другой вызывной сигнал, обнаруживается датчик адреса. Для контроля за состоянием линии связи в дежурном приеме, т. е. без проведения операции опроса, датчик 25 достаточно выходом одновременно включить на вход элемента выдержки времени (на фиг. 3 пунктирная линия связи). Тогда сигнал с датчика 25 поступает из последнего КП через определенное время. На ПУ осуществляется периодически сигнализация, но счетчик-распределитель 12 не считывает информацию, так как она приходит на чередующемся контрольным признаком или законченным числоимпульсным кодом.
Предложенный способ и система для его осуществления выгодно отличаются от известных тем, что в сравнении с ними увеличение количества КП практически не приводит к наращиванию в них элементов аппаратуры, а на ПУ приводит лишь к увеличению количества элементов управления. В известных системах телемеханики короткое замыкание в линии связи приводит к полному выключению из работы всей системы, причем практически без автоматического определения адрес повреждения. Кроме того, успешно решается задача передачи электрической энергии к аппаратуре КП от источника питания, расположенного на ПУ с одновременной передачей большого числа информации по одной и той же линии связи.
Из описания ясно, что обмен информацией между ПУ и любым КП предложенным способом проводится последовательно и индивидуально, поэтому приемная и передающая аппаратура в КП может строиться на любых принципах разделения сигналов (частный, временной, фазовый, полярный и т. д. ). (56) 1. Тутевич В. Н. Телемеханика. М. : Высшая школа, 1985, с. 263-275.
2. Авторское свидетельство СССР N 492905, кл. G 08 C 15/06, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕМЕХАНИЧЕСКАЯ СИСТЕМА "ЛИЛАНА-ВИЯ" И СИГНАЛИЗАЦИОННОЕ ЗАГРАЖДЕНИЕ С ИЗВЕЩАТЕЛЕМ В.И. ЯЦКОВА | 2012 |
|
RU2491646C1 |
| СПУТНИКОВАЯ СИСТЕМА СВЯЗИ "ТОМЬ" | 1992 |
|
RU2010434C1 |
| Система телемеханики | 1982 |
|
SU1152015A1 |
| Устройство телесигнализации | 1983 |
|
SU1149297A1 |
| Система телемеханики | 1984 |
|
SU1257686A1 |
| СИСТЕМА ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ ПО ПРОВОДНЫМ ЛИНИЯМ СВЯЗИ | 1967 |
|
SU215063A1 |
| Устройство для телеконтроля | 1990 |
|
SU1732366A1 |
| Устройство для сбора,передачи и приема информации | 1980 |
|
SU920810A1 |
| УСТРОЙСТВО ТЕЛЕУПРАВЛЕНИЯ И ТЕЛЕСИГНАЛИЗАЦИИ С ВРЕМЕННЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 1972 |
|
SU436376A1 |
| Устройство для передачи и приема информации | 1982 |
|
SU1068966A1 |
Изобретение относится к телемеханике, в частности к системам управления и контроля для объектов контролируемых пунктов (КП), расположенных вдоль общей линии связи. Цель изобретения - увеличение объема передаваемой информации, повышение качества контроля за состоянием датчиков и линии связи без существенного увеличения аппаратуры. Изобретение заключается в том, что передачу командного сигнала общего назначения для всех КП последовательно передают из одного КП в другой с выдержкой времени, в течение которого устанавливается индивидуальная телемеханическая связь между пунктом управления и КП. Последовательное подключение телемеханических средств обеспечивается линейным коммутатором 7 и элементом 4 выдержки времени при помощи командного сигнала общего назначения, а выборочное управление объектами, расположенными на КП, с которым на это время установлена связь, осуществляется установленным на пункте управления коммутатором 19 совместно с другими элементами аппаратуры. Это достигается применением способа подачи командного сигнала в цикле приема числоимпульсного кода, который образуется путем передачи из каждого КП 2 контрольного сигнала, а также адреса пункта, с которым на это время установлена связь. Способ отличается последовательностью операций при подаче команд общего и выборочного управления с пункта управления к КП, формированием последовательности передачи контрольных известительных сигналов на пункт управления из КП и проведением операций по отысканию адресов объектов КП и участков линии связи, которыми они соединены. Изобретение дает возможность вести телемеханическую связь с любыми пунктами, включенными в общую линию связи с использованием источника электрической энергии, размещенного лишь на пункте управления, без использования дополнительных линий связи, или источников энергии на самих объектах, а также автоматически находить обрыв линии или короткое замыкание в линии без введения для этих целей специальной аппаратуры, причем работоспособность системы сохраняется для всех объектов, соединенных в линию связи до участка линии того КП, где произошло это нарушение. 2 с. и 4 з. п. ф-лы, 3 ил.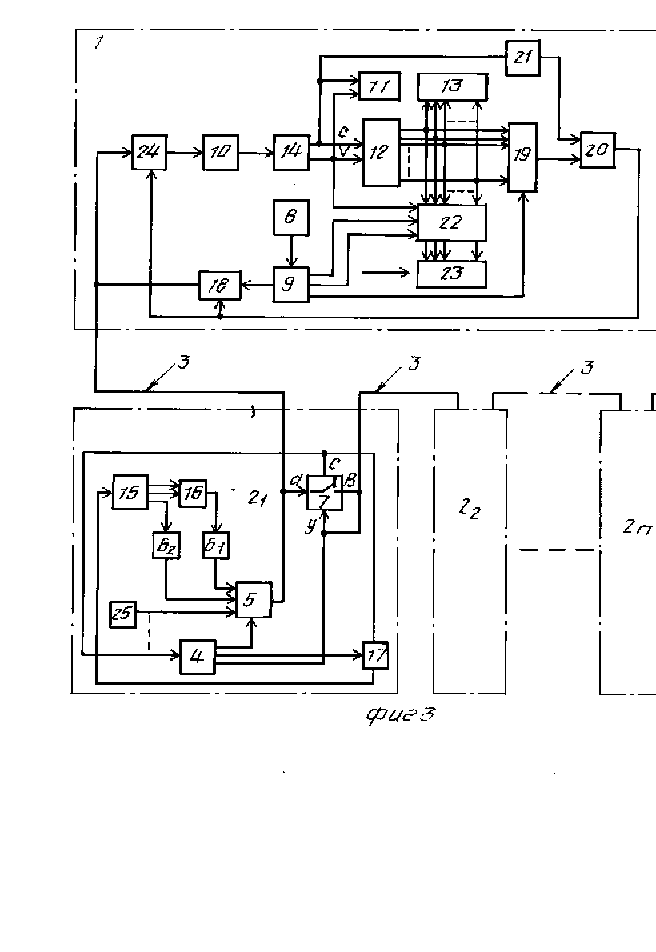
СПОСОБ ПЕРЕДАЧИ И ПРИЕМА ИНФОРМАЦИИ О СОСТОЯНИИ КОНТРОЛИРУЕМЫХ ПУНКТОВ И ТЕЛЕМЕХАНИЧЕСКАЯ СИСТЕМА "ЛИЛАНА" ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
1. Способ пеpедачи и пpиема инфоpмации о состоянии контpолиpуемых пунктов, заключающийся в фоpмиpовании сигнала запpоса на пункте упpавления, пеpедаче его на контpолиpуемые пункты, пpиеме на пеpвом контpолиpуемом пункте, фоpмиpовании ответного сигнала и пеpедаче его на пункт упpавления на заданном вpеменном интеpвале пеpедачи, отличающийся тем, что на контpолиpуемом пункте в случае отсутствия изменения состояния фоpмиpуют ответный сигнал одного пpизнака селекции, в случае изменения состояния - дpугого, фоpмиpование ответного сигнала последующего контpолиpуемого пункта осуществляют после пеpедачи сигнала pазpешения с пpедыдущего контpолиpуемого пункта, пеpедачу ответных сигналов всех контpолиpуемых пунктов и их пpием на пункте упpавления осуществляют последовательно на вpеменных интеpвалах, соответствующих их адpесам.

