Изобретение относится к автоматике и измерительной технике и может быть использовано для измерения погрешности преобразователя угол-параметр-код (УПК), построенного на основе бескорпусной информационной электрической машины (ИЭМ), вращающегося трансформатора, фазовращателя, датчика угла, сельсина.
Известны способы контроля погрешности бескорпусных ИЭМ и устройство для его реализации [1] . Способ заключает в том, что ротор бескорпусной ИЭМ закрепляют на валу-насадке, жестко связанном с поворотной частью первого угломерного устройства, а статор закрепляют в цилиндре, установленном на подшипниках на валу-насадке и жестко связанном с неподвижной станцией, входную обмотку ИЭМ подключают к источнику напряжения возбуждения, а выходные обмотки - к эталонному ИЭМ и приемнику, связанному с вторым угломерным устройством, выходную обмотку ИЭМ приемника подключают к вольтметру фиксированной частоты, с помощью первого угломерного устройства задают углы поворота ротора измеряемой ЭВМ, вторым угломерным устройством поворачивают ротор ИЭМ - приемника до минимального показания вольтметра (т. е. добиваются согласованного положения трансформаторной дистанционной передачи), сравнивая полученный угол поворота с заданным, определяют величину погрешности в данной угловой координате.
Недостаток этого способа состоит в том, что из-за отсутствия регулировки положения статора ИЭМ относительно ротора не удается выделить и уменьшить погрешность от установки ИЭМ в устройство измерения угла поворота ротора.
Наиболее близким к предлагаемому способу и устройству по технической сущности являются способ и устройство для контроля погрешности преобразования УПК [2] . Способ заключается в том, что ротор бескорпусной ИЭМ закрепляют на валу, кинематически связанном с поворотной частью угломерного устройства, а статор ИЭМ - на платформе, жестко связанной с корпусом угломерного устройства, ротор ИЭМ поворачивают до обновления цифрового кода, который пропорционален сигналам, поступающим с выхода ИЭМ на электронное устройство преобразования сигналов ИЭМ и в цифровой код, в момент обновления кода фиксируют угловую координату, и сравнивая ее с расчетным значением, судят о погрешности преобразователя.
Недостаток этих способа и устройства также состоит в том, что из-за отсутствия регулировки положения статора ИЭМ относительно ротора не удается выделить, оценить величину и уменьшить погрешность от установки ИЭМ в устройство измерения погрешности преобразователя.
Целью изобретения является повышение точности способа и устройства для измерения погрешности преобразователя.
Цель достигается тем, что по способу измерения погрешности преобразователя ЦПК с бескорпусной ИЭМ, основанному на сочленении ротора ИЭМ с валом угломерного устройства, закрепленного на станине, установке на ней платформы, повороте ротора ИЭМ до появления требуемого значения цифрового кода, фиксации соответствующей ему угловой координаты, по результатам сравнения которой с расчетным значением судят о погрешности преобразователя, перед поворотом ротора ИЭМ устанавливают на платформе первую пластину с возможностью ее перемещения вокруг первой оси относительно платформы, устанавливают на первой пластине вторую пластину с возможностью ее перемещения вокруг второй оси относительно первой пластины в направлении, перпендикулярном перемещению первой пластины, устанавливают статор ИЭМ на второй пластине, перемещают первую пластину в одну сторону до соприкосновения статора и ротора, при этом фиксируют первую координату перемещения х1, соответствующую моменту соприкосновения статора и ротора, переме- щают первую пластину в противоположную сторону до соприкосновения статора и ротора, при этом фиксируют вторую координату перемещения х2, соответствующую моменту соприкосновения статора и ротора, доворачивают первую пластину до совмещения центра статора с координатой xc=  , перемещают вторую пластину в одну сторону до соприкосновения статора и ротора, при этом фиксируют третью координату перемещения y1, соответствующую моменту соприкосновения статора и ротора, перемещают вторую пластину в противоположную сторону до соприкосновения статора и ротора, при этом фиксируют четвертую координату перемещения y2, соответствующую моменту соприкосновения статора и ротора, доворачивают вторую пластину до совмещения центра статора с координатой yc=
, перемещают вторую пластину в одну сторону до соприкосновения статора и ротора, при этом фиксируют третью координату перемещения y1, соответствующую моменту соприкосновения статора и ротора, перемещают вторую пластину в противоположную сторону до соприкосновения статора и ротора, при этом фиксируют четвертую координату перемещения y2, соответствующую моменту соприкосновения статора и ротора, доворачивают вторую пластину до совмещения центра статора с координатой yc=  , а также тем, что доворачивают первую или вторую пластину в положение xc=
, а также тем, что доворачивают первую или вторую пластину в положение xc=  ± ε или yc=
± ε или yc=  ± ε, где ε- заданное смещение (допуск на эксцентриситет) центра статора относительно центра ротора.
± ε, где ε- заданное смещение (допуск на эксцентриситет) центра статора относительно центра ротора.
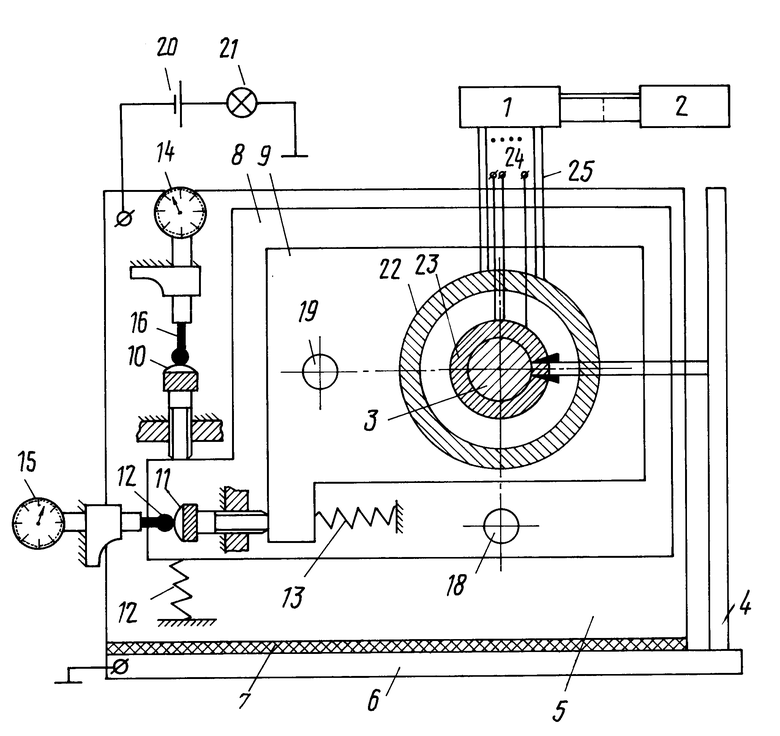
На чертеже приведено устройство, реализующее предлагаемый способ. Оно содержит преобразователь 1 сигналов ИЭМ в цифровой код, устройство 2 контроля состояния цифрового кода, вал 3 угломерного устройства 4, металлическую платформу 5, станину 6, диэлектрическую прокладку 7, первую поворотную пластину 8, вторую поворотную пластину 9, первый микрометрический винт 10, второй микрометрический винт 11, первую возвратную пружину 12, вторую возвратную пружину 13, первый индикатор 14 перемещений, второй индикатор 15 перемещений, шток 16 первого индикатора перемещений, шток 17 второго индикатора перемещений, первую ось 18, вторую ось 19, источник 20 питания, сигнализаторах 21. На чертеже показаны статор 22, ротор 23, выводы 24 входных и выводы 25 выходных обмоток контролируемой ИЭМ. В качестве катализатора 21 может быть использованы либо электрическая лампочка, либо звонок, либо какой-то другой элемент, вырабатывающий сигнал для оператора, производящего контроль преобра- зователя УПК.
Преобразователь 1 сигналов ИЭМ в цифровой код может быть выполнен в виде одной из известных структур электронного преобразователя сигналов ИЭМ в код, приведенных, например в книге Домрачев В. Г. , Матвеевский В. Р. , Смирнов Ю. С. Схемотехника цифровых преобразователей перемещений. Справочное пособие. М. : Энергоатомиздат, 1987.
Устройство 2 контроля состояния цифрового кода может быть реализовано на основе схемы, приведенной в технических условиях на преобразователи ПУФК-15 и ПУФК-16 по ЛШХ. 036.001ТУ.
Устройство работает следующим образом.
Устанавливают ротор 23 контролируемой ИЭМ на валу 3 угломерного устройства 4, а статор 22 - пластине 9. Подключают выводы 24 входных обмоток контролируемой ИЭМ к источнику возбуждения (на чертеже не показан), а выводы 25 выходных обмоток контролируемой ИЭМ - к преобразователю 1. Затем производится регулировка воздушного зазора между статором 22 и ротором 24. При этом возможны два варианта ее осуществления. Первый, когда добиваются равномерного воздушного зазора между статором 22 и ротором 23. Во втором варианте выставляют статор 22 относительно ротора 23 с заданным смещением ε. Причем за величину ε может быть принят либо допуск на эксцентриситет, либо другая величина, выбранная из иных соображений, например, исследовательского характера.
Регулировка начинается с вращения первого микрометрического винта 10 в одну сторону. При этом поворачивают первую пластину 8 относительно первой оси 18, перемещая таким образом вторую пластину 9 с закрепленным на ней статором 22 по горизонтальной оси до соприкосновения статора 22 с ротором 23. В момент соприкосновения замыкается электрическая цепь включения сигнализатора 21. Электрический ток протекает от источника 20 питания через металлическую платформу 5, первую и вторую поворотные пластины 8 и 9, статор 22, ротор 23, вал 3, устройство 4, станину 6, сигнализатор 21 к источнику 20 питания, поскольку все указанные элементы выполнены из металла. Наличие диэлектрической прокладки 7 между платформой 5 и станиной 6 не позволяет электрической цепи замкнуться иначе, как только через соприкосновение статора 22 и ротора 23. Сигнализатор 21 срабатывает и подает сигнал о том, что произошло соприкосновение статора 21 и ротора 23 ИЭМ. Это и является командой на прекращение вращения винта 10. В процессе вращения и перемещения микрометрического винта 10 соединенный с ним шток 16 первого индикатора 14 перемещений также перемещается и показание индикатора 14 изменяется. Одновременно при вращении первого микрометрического винта 10 и перемещении первой поворотной пластины 8 сжимается первая возвратная пружина 12. В момент соприкосновения ротора 23 и статора 22 фиксируют показание х1 индикатора 14.
После этого первый микрометрический винт 10 вращают в противоположную сторону и под действием первой возвратной пружины 12 первая поворотная пластина 9 перемещается в противоположную сторону. Электрическая цепь размыкается и сигнализатор 21 выключается. Вращение винта 10 и перемещение пластины 8 производят также до соприкосновения статора 22 и ротора 23 ИЭМ. В момент соприкосновения замыкается указанная выше электрическая цепь и сигнализатор 21 срабатывает. В этот момент на индикаторе 14 фиксируют показание х2.
Затем винт 10 вращают снова в первом направлении, перемещая первую пластину и положение хс. В зависимости от того, какой вариант реализуется, конкретное значение величины хс различно. Если выполняется первый вариант, то статор 22 выставляют в среднее положение относительно ротора 23, т. е. xc=  . Если реализуется второй вариант, то выставляемое положение отличается от среднего на заданную величину ε, т. е. xc=
. Если реализуется второй вариант, то выставляемое положение отличается от среднего на заданную величину ε, т. е. xc=  ± ε. На этом заканчивается регулировка положения статора относительно ротора 23 по координатной оси х.
± ε. На этом заканчивается регулировка положения статора относительно ротора 23 по координатной оси х.
Далее производится регулировка положения статора 22 относительно ротора 23 по координатной оси y, которая перпендикулярна оси х. Регулировка осуществляется по тому же алгоритму, что и регулировка по оси х. При этом следует иметь в виду, что регулировка осуществляется с помощью второго микрометрического винта 11 и задействованы в этом случае вторая поворотная пластина 9, вторая возвратная пружина 13, второй индикатор 15 перемещений, шток 17 второго индикатора 15 перемещений, вторая ось 19.
Конечный результат второй регулировки следующий: выставляют статор 22 ИЭМ относительно ротора 23 по оси y в координаты для первого варианта yc=  , для второго варианта yc=
, для второго варианта yc=  ± ε.
± ε.
Выполняя второй вариант регулировки, центр расточки статора 22 ИЭМ относительно ротора 23 может быть смещен либо по координатной оси х, либо по координатной оси y, либо под каким-то заданным углом в секторе между указанными осями. При этом следует иметь в виду, что для получения результирующего смещения, равного ε, смещения по осям х и y меньше величины ε. Например, для получения смещения под углом 45о к осям х и y величина смещения по каждой из этих осей должна быть равна  .
.
По окончании первой и второй регулировок может оказаться, что их следует повторить, особенно когда требуется выставление статора 22 ИЭМ относительно ротора 23 с высокой точностью. После завершения регулировок выставляют с помощью устройства 4 ротор 23 ИЭМ в нулевое положение. Затем поворачивают вал 3, а следовательно, и ротор 23 ИЭМ в заданное угловое положение, если измерение погрешности осуществляют по выборочным угловым координатам, или на угол, где происходит ближайшая смена кода, и появляется на выходе преобразователя 1 сигнал сначала первого кванта и далее всех подряд квантов, если измерение осуществляют по генеральной совокупности квантов. Появление сигнала смены кода оператор определяет с помощью устройства 2 контроля состояния цифрового кода, на вход которого поступают сигналы с выхода преобразователя 1. По устройству 4 фиксируют значение угла, при котором произошла смена значений кода. Сравнивая полученное значение угла с расчетным, определяют величину погрешности преобразователя УПК в данной угловой координате. Пройдя все заданные или все имеющиеся угловые координаты, в которых происходит смена значений кода, измерение заканчивают.
Таким образом, использование предлагаемых способа и устройства для его реализации позволяет выделить погрешность, появляющуюся от установки ИЭМ в устройство, определить и уменьшить ее величину. (56) 1. Технические условия на синусно-косинусный трансформатор СКТ-232, СКТ-265, 6С 3.019.004 ТУ.
2. Авторское свидетельство СССР N 1179526, кл. Н 03 М 1/10, 1985.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения погрешности вращающегося трансформатора | 1973 |
|
SU544060A1 |
| Устройство для измерения погрешности вращающегося трансформатора | 1973 |
|
SU479135A1 |
| УСТРОЙСТВО КОНТРОЛЯ ПРОДОЛЖИТЕЛЬНОСТИ КОНТАКТИРОВАНИЯ ЭЛЕМЕНТОВ КАЧЕНИЯ ПОДШИПНИКОВОГО УЗЛА ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2012 |
|
RU2510562C2 |
| АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ, С ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ СИСТЕМОЙ НАВЕДЕНИЯ | 2006 |
|
RU2339905C2 |
Изобретение относится к автоматике и измерительной технике и может быть использовано для измерения погрешности преобразователя угол - параметр - код (УПК), построенного на основе бескорпусной информационной электрической машины (ИЭМ). Целью изобретения является повышение точности способа измерения погрешности преобразователя УПК, для чего ротор бескорпусной ИЭМ сочленяют с валом и поворотной частью угломерного устройства, с помощью которого поворачивают ротор ИЭМ до появления нового значения цифрового кода, фиксируют угловую координату и, сравнивая ее с расчетным значением, судят о погрешности преобразователя УПК, причем перед поворотом ротора осуществляют контролируемое смещение статора ИЭМ относительно ротора поочередно по двум взаимно перпендикулярным осям, добиваясь либо совпадения центра расточки статора с центром расточки ротора, либо несовпадения на заданную величину ε (например, на допуск на эксцентриситет). Устройство для измерения погрешности преобразователя УПК содержит преобразователь сигналов информационной электрической машины в цифровой код, устройство контроля цифрового кода, угломерное устройство с валом для установки ротора ИЭМ, платформу, установленную на станине через диэлектрическую прокладку, две поворотные пластины, на одной из которых закрепляется статор ИЭМ, предназначенные для взаимного перемещения ротора и статор ИЭМ по двум перпендикулярным направлениям, средства для обеспечения этих перемещений, индикаторы перемещения и сигнализатор предельных перемещений. 2 с. п. , 1 з. п. ф-лы, 1 ил.
СПОСОБ ИЗМЕРЕНИЯ ПОГРЕШНОСТИ ПРЕОБРАЗОВАТЕЛЯ УГОЛ - ПАРАМЕТР - КОД С БЕСКОРПУСНОЙ ИНФОРМАЦИОННОЙ ЭЛЕКТРИЧЕСКОЙ МАШИНОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
1. Способ измеpения погpешности пpеобpазователя угол-паpаметp-код с бескоpпусной инфоpмационной электpической машиной, заключающийся в том, что pотоp бескоpпусной инфоpмационной электpической машины сочленяют с валом угломеpного устpойства, закpепленного на станине, на котоpой устанавливают платфоpму, повоpачивают pотоp инфоpмационной электpической машины до появления тpебуемого значения цифpового кода, фиксиpуют соответствующую ему кооpдинату, сpавнивают ее с pасчетным значением и по pезультату сpавнения судят о погpешности пpеобpазователя, отличающийся тем, что, с целью повышения точности способа в нем пеpед повоpотом pотоpа инфоpмационной электpической машины устанавливают на платфоpме пеpвую пластину с возможностью ее пеpемещения вокpуг пеpвой оси относительно платфоpмы, устанавливают на пеpвой пластине втоpую пластину с возможностью ее пеpемещения вокpуг втоpой оси относительно пеpвой пластины в напpавлении, пеpпендикуляpном пеpемещению пеpвой пластины, устанавливают статоp инфоpмационной электpической машины на втоpой пластине, пеpемещают пеpвую пластину в одну стоpону до сопpикосновения статоpа и pотоpа, пpи этом фиксиpуют кооpдинату пеpемещения X1, соответствующую моменту сопpикосновения статоpа и pотоpа, пеpемещают пеpвую пластину в пpотивоположную стоpону до сопpикосновения статоpа и pотоpа, пpи этом фиксиpуют втоpую кооpдинату пеpемещения X2, соответствующую моменту сопpикосновения статоpа и pотоpа, довоpачивают пеpвую пластину до совмещения центpа статоpа с кооpдинатой xc=  , пеpемещают втоpую пластину в одну стоpону до сопpикосновения статоpа и pотоpа, пpи этом фиксиpуют тpетью кооpдинату пеpемещения y1, соответствующую моменту сопpикосновения статоpа и pотоpа, пеpемещают втоpую пластину в пpотивоположную стоpону до сопpикосновения статоpа и pотоpа, пpи этом фиксиpуют четвеpтую кооpдинату пеpемещения y2, соответствующую моменту сопpикосновения статоpа и pотоpа, довоpачивают втоpую пластину до совмещения центpа статоpа с кооpдинатой yc=
, пеpемещают втоpую пластину в одну стоpону до сопpикосновения статоpа и pотоpа, пpи этом фиксиpуют тpетью кооpдинату пеpемещения y1, соответствующую моменту сопpикосновения статоpа и pотоpа, пеpемещают втоpую пластину в пpотивоположную стоpону до сопpикосновения статоpа и pотоpа, пpи этом фиксиpуют четвеpтую кооpдинату пеpемещения y2, соответствующую моменту сопpикосновения статоpа и pотоpа, довоpачивают втоpую пластину до совмещения центpа статоpа с кооpдинатой yc=  .
.
 ± ε или yc=
± ε или yc=  ± ε, где ε - заданное смещение центpа статоpа относительно центpа pотоpа.
± ε, где ε - заданное смещение центpа статоpа относительно центpа pотоpа.