Изобретение относится к оптическому приборостроению, в частности к устройствам, предназначенным для преобразования оптического изображения.
Известен способ управления оптической системой путем регулирования положения в пространстве ее фокуса, включающий измерение коэффициента преломления пористого оптического элемента в зависимости от изменения концентрации паров в среде размещения оптического элемента [1] .
Известна также управляемая оптическая система, содержащая по крайней мере один пористый оптический элемент, установленный в полом герметичном корпусе с прозрачными окнами, в котором размещен регулятор концентрации паров жидкости в полости корпуса.
Недостатком аналогов является низкое быстродействие при необходимости перестройки фокусного расстояния из-за медленных процессов диффузии паров в поры линзы и обратно.
Известен также способ управления оптической системой, выбранный за прототип, путем регулирования положения в пространстве ее фокуса, включающий изменение кривизны свободной параболической поверхности жидкости в сосуде в зависимости от изменения скорости вращения его вокруг вертикальной оси [2] .
Известна также управляемая оптическая система, выбранная за прототип, содержащая вертикально расположенный цилиндрический сосуд с жидкостью, установленный во вращающуюся обойму, приводимую во вращение электродвигателем, имеющим статор, ротор и, по крайней мере, один подшипник, причем сосуд выполнен из оптически прозрачного материала и установлен в роторе электродвигателя, выполненным полым с торцовыми отверстиями, соответствующими торцовым поверхностям сосуда, при этом опорой вращения полого ротора, установленного в подвижной части подшипника является его наружная поверхность.
Недостатками являются плохие динамические характеристики и прежде всего быстродействие при переходе с одного фокусного расстояния на другое, связанное с инерционностью вращающейся жидкости, а также большая динамическая ошибка при отслеживании системой заданного изменения положения фокуса в пространстве.
Целью изобретения является улучшение динамических характеристик.
С этой целью в известном способе управления оптической системы путем регулирования положения в пространстве ее фокуса, включающем изменение кривизны свободной параболической поверхности столба жидкости в зависимости от изменения скорости вращения его вокруг вертикальной оси, одновременно перемещают свободную параболическую поверхность столба жидкости вдоль оси вращения на величину, зависящую от величины и знака изменения скорости вращения.
С этой же целью при увеличении скорости вращения свободно параболическую поверхность столба жидкости перемещают вниз, а при уменьшении скорости вращения - вверх.
С этой же целью свободную параболическую поверхность перемещают путем изменения высоты столба жидкости.
Эта же цель достигается тем, что в известной управляемой оптической системе, содержащей вертикально расположенный цилиндрический сосуд с оптически прозрачными основаниями, частично заполненный жидкостью и установленный в роторе электродвигателя, выполненном полым с торцовыми отверстиями, соответствующими основаниям сосуда, нижняя часть сосуда, выступающая из ротора и полностью заполненная жидкостью снабжена симметрично расположенными по цилиндрической поверхности одинаковыми отверстиями, закрытыми эластичным материалом.
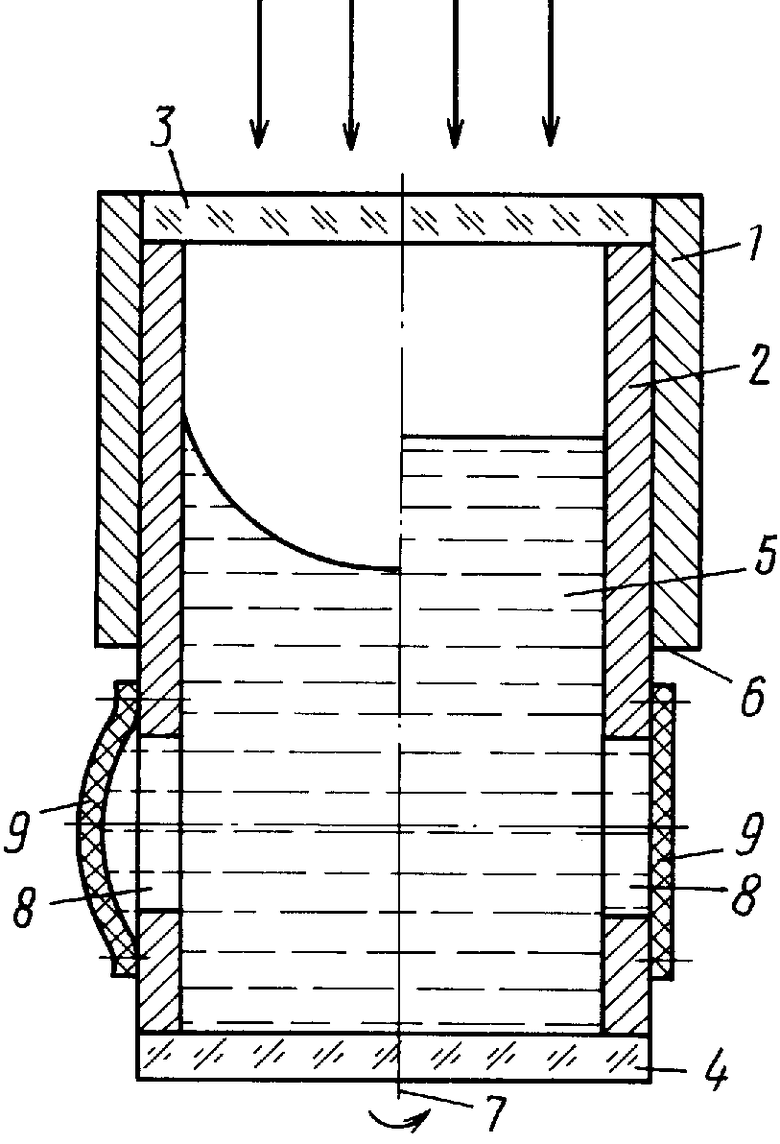
На чертеже изображена управляемая оптическая система, причем правая ее часть (от оси вращения) соответствует неподвижному состоянию, а левая часть - вращению. Система содержит полый вертикально установленный ротор 1 электродвигателя (не показан), в котором соосно и жестко закреплен цилиндрический сосуд 2 с оптически прозрачными крышками 3 и 4. Сосуд 2 частично заполнен жидкостью 5. В нижней части сосуда 2, полностью заполненной жидкостью и выступающей за кромку 6 ротора 1, имеются симметрично расположенные друг относительно друга и оси вращения 7 сквозные одинаковые отверстия 8, закрытые эластичным материалом 9.
Система работает следующим образом. В неподвижном состоянии свободная поверхность жидкости 5 в сосуде 2 горизонтальна, следовательно, имеет нулевую кривизну, а фокус ее находится в бесконечности. При включении электродвигателя ротор 1 начинает вращаться вокруг вертикальной оси, жидкость в сосуде 2 увлекается вращением, ее свободная поверхность начинает прогибаться вниз, приобретая форму параболоида вращения. Кривизна К параболы в ее вершине обратно пропорциональна фокусному расстоянию F, т. е. K =  . Тогда при увеличении кривизны К фокусное расстояние свободной поверхности жидкости 5 уменьшается и фокус из бесконечности опускается по оси вращения вниз. Чем больше скорость, а следовательно, и кривизна, тем ниже опускается фокус. Одновременно с этим из-за действия центробежных сил на жидкость 5 в отверстиях 8 эластичный материал 9 в этих отверстиях начинает прогибаться в сторону от оси вращения. Чем больше скорость вращения, тем меньше высота столба вращающейся жидкости. Параболоид вращения опускается, увлекая за собой и свой фокус. Таким образом, одновременно происходят два движения фокуса вниз. При уменьшении скорости вращения ротора происходят аналогичные движения фокуса только вверх по оси вращения, поскольку из-за уменьшения центробежных сил кривизна параболоида уменьшается, а уровень свободной поверхности жидкости 5 повышается, поскольку эластичный материал 9 в отверстиях 8 возвращается ближе к исходному состоянию.
. Тогда при увеличении кривизны К фокусное расстояние свободной поверхности жидкости 5 уменьшается и фокус из бесконечности опускается по оси вращения вниз. Чем больше скорость, а следовательно, и кривизна, тем ниже опускается фокус. Одновременно с этим из-за действия центробежных сил на жидкость 5 в отверстиях 8 эластичный материал 9 в этих отверстиях начинает прогибаться в сторону от оси вращения. Чем больше скорость вращения, тем меньше высота столба вращающейся жидкости. Параболоид вращения опускается, увлекая за собой и свой фокус. Таким образом, одновременно происходят два движения фокуса вниз. При уменьшении скорости вращения ротора происходят аналогичные движения фокуса только вверх по оси вращения, поскольку из-за уменьшения центробежных сил кривизна параболоида уменьшается, а уровень свободной поверхности жидкости 5 повышается, поскольку эластичный материал 9 в отверстиях 8 возвращается ближе к исходному состоянию.
Таким образом, благодаpя синфазному действию двух движений, направленных на перемещение фокуса вдоль оптической оси, достигается высокое быстродействие системы управления и уменьшение динамических ошибок в режимах перемещения фокуса.
Оптическая система может работать как на отражение (зеркало), так и на пропускание (линза) лучистой энергии, что определяется степенью прозрачности жидкости.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОСТРОЕНИЯ МОНОХРОМАТИЧЕСКОГО ИЗОБРАЖЕНИЯ | 1995 |
|
RU2112263C1 |
| ГАЛИЛЕЕВСКАЯ ТЕЛЕСКОПИЧЕСКАЯ СИСТЕМА | 1995 |
|
RU2080633C1 |
| ИНТЕРФЕРЕНЦИОННЫЙ СПОСОБ КОНТРОЛЯ ГЕОМЕТРИЧЕСКОГО РАСПОЛОЖЕНИЯ ЛИНЗ И ИНТЕРФЕРЕНЦИОННОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2078305C1 |
| СВЕТОСИЛЬНЫЙ ДЛИННОФОКУСНЫЙ ОБЪЕКТИВ | 1991 |
|
RU2010271C1 |
| ОКУЛЯР ОПТИЧЕСКОГО ПРИБОРА | 1990 |
|
RU2028650C1 |
| САМОУСТАНАВЛИВАЮЩИЙСЯ НИВЕЛИР | 1996 |
|
RU2154809C2 |
| ИНТЕРФЕРЕНЦИОННЫЙ СФЕРОМЕТР | 1992 |
|
RU2037768C1 |
| СПОСОБ ОПТИЧЕСКОЙ ТОМОГРАФИИ ПРОЗРАЧНЫХ МАТЕРИАЛОВ | 1993 |
|
RU2088904C1 |
| МОНОХРОМАТИЧЕСКИЙ ОБЪЕКТИВ | 1991 |
|
RU2017178C1 |
| УСТРОЙСТВО ДЛЯ ПОДБОРА ОЧКОВ | 1991 |
|
RU2085106C1 |
Сущность изобретения: в известном способе изменения кривизны свободной поверхности столба жидкости, вращаемого вокруг вертикальной оси, предлагается с целью улучшения динамических характеристик процесса управления в зависимости от величины и знака изменения скорости вращения регулировать высоту столба жидкости. 2 з. п. ф-лы, 1 ил.
