Изобретение относится к электротехнике и может быть использовано для улучшения пусковых характеристик синхронного двигателя в режимах пуска и самозапуска за счет увеличения асинхронного момента синхронного двигателя путем изменения параметров цепи обмотки возбуждения.
Синхронные двигатели чувствительны к кратковременным нарушениям нормального питания, в результате чего могут выпадать из синхронизма с последующим отключением от сети. Номинально загруженный синхронный двигатель не всегда самозапускается и ресинхронизируется после восстановления питания в результате действия устройств АПВ, АВР.
Повторный пуск номинально нагруженного синхронного двигателя не всегда происходит успешно. Особенно это справедливо для тихоходных синхронных двигателей с пониженными значениями момента во всем диапазоне скольжений. Актуальными поэтому являются мероприятия, направленные на повышение электромагнитного момента синхронного двигателя, которые приводят к улучшению его пусковых характеристик, особенно на этапе разгона.
Известны способы повышения электромагнитного момента синхронного двигателя, основанные на однократном и непрерывном изменении кратности пускового сопротивления на этапе разгона [1].
Недостатком этих способов является относительно небольшое увеличение момента.
Известны также вентильно-конденсаторные системы возбуждения при асинхронном пуске, в которых осуществляют последовательное включение конденсатора с пусковым активным сопротивлением. Этим способом достигается увеличение пускового момента при одновременном уменьшении входного, что затрудняет синхронизацию двигателя после достижения подсинхронной скорости [2].
Способу присущ тот недостаток, что для его реализации требуется применение неэлектролитических конденсаторов большой емкости с высоким рабочим напряжением. Поэтому для высоковольтных синхронных двигателей большой мощности этот способ практического значения не имеет.
Наиболее эффективными являются способы разгона синхронных двигателей, основанные на подключении к обмотке возбуждения возбудителей с изменяющимися во времени по определенным законам напряжению на обмотке возбуждения или сопротивлению в цепи этой обмотки [3-5].
Однако, способы эти применимы к возбудителям конкретного исполнения и при решении вопросов пуска и самозапуска синхронных двигателей не всегда обеспечивают необходимое повышение электромагнитного момента во всем рабочем диапазоне скольжений.
Наиболее близким к заявляемому является способ пуска и самозапуска синхронного двигателя, по которому работает устройство, описанное в [6]. Данный способ позволяет оптимальным образом управлять параметрами цепи возбуждения по критерию максимума электромагнитного момента при всех скольжениях независимо от конкретного исполнения возбудителя. Комбинация различных законов управления синхронным двигателем на нескольких диапазонах изменения скольжения позволяет, изменяя напряжение Uв на кольцах обмотки возбуждения и добавочное активное сопротивление в цепи обмотки возбуждения, добиться того, что среднее значение момента m, обусловленного взаимодействием тока в обмотке возбуждения if с потокосцеплением статора, максимально при ограничениях на Uf и на действующее значение if. В способе-прототипе при изменении скольжения S в диапазоне от 100% до некоторого первого заданного значения происходит разгон двигателя с обмоткой возбуждения, замкнутой на активное сопротивление, а после достижения скольжением некоторого второго заданного значения происходит синхронизация двигателя по углу θ между сходящимися магнитными полями статора и ротора и скольжению S. Что касается до диапазона скольжений от первого заданного значения до второго заданного значения, то путем расчетов и в результате решения вариационной задачи было определено следующее: в этом диапазоне скольжений наиболее оптимальным является такое управление параметрами цепи возбуждения, при котором напряжение возбуждения должно изменяться скачком, принимая граничные значения в функции от угла θ и скольжения S в моменты времени, когда изменяется знак синуса угла, состоящего из двух слагаемых: угла θ и угла α =arctg STd', где Td' - постоянная времени затухания переходной составляющей тока статора по продольной оси. Добавочное активное сопротивление Rдоб в этом диапазоне скольжений также должно изменяться скачком, принимая граничные значения 0 и Rдоб в функции от угла θ, скольжения S и тока в обмотке возбуждения if. В диапазоне скольжений, меньших второго заданного значения на кольца обмотки возбуждения подается постоянное по знаку напряжение возбуждения. Устройство, реализующее пуск и самозапуск синхронного двигателя в соответствии с описанным выше способом, содержит возбудитель, устройство измерения угла θ и скольжения S, формирователи углов коммутации на включение максимального напряжения возбуждения и его отключение, блок логики для управления структурой возбудителя, выходные формирователи импульсов. Так как на разных интервалах скольжений применяются различные способы управления возбуждением, устройство обеспечивает переход одного к другому в функции от скольжения S. При пуске сначала происходит разгон с применением пускового сопротивления, затем на среднем диапазоне скольжений осуществляется циклическая подача возбуждения, чередующаяся с гашением поля на сопротивление, и затем синхронизация по углу θ и скольжению S. При самозапуске устройство гасит магнитное поле обмотки возбуждения выпавшего из синхронизма двигателя, а затем осуществляется разгон и синхронизация синхронного двигателя так же, как это происходит во время пуска.
Недостатком способа-прототипа является необходимость определения угла θ между сходящимися полями статора и обмотки возбуждения и угла α. Определение θ требует или установки на валу синхронного двигателя датчика положения ротора, а это не всегда технически возможно (там, где эксплуатируются синхронные двигатели закрытого исполнения без свободного доступа к валу), или применения косвенных способов определения θ, как в прототипе. При косвенном определении θ необходимо знать параметры синхронного двигателя и учитывать зависимость активных и индуктивных сопротивлений обмоток статора и ротора от температуры, вытеснения тока, насыщения и других факторов, что усложняет устройство для определения θ и понижает точность определения этого угла, требует введения коррекций и так далее. При этом погрешность в косвенном определении θ может достигать 15о. Определение угла α также связано с необходимостью учета изменения параметров обмотки возбуждения синхронного двигателя в зависимости от скольжения, вытеснения токов, температуры и других факторов. Все это может существенно снижать точность управления возбуждением и эффективность способа.
В основу заявляемого решения положена задача повышения эффективности способа за счет более простого и точного определения моментов переключения обмотки возбуждения с возбудителя с формированным напряжением на добавочное активное сопротивление и обратно (циклическая подача возбуждения, чередующаяся с гашением поля обмотки возбуждения) в течение каждого проворота ротора относительно поля статора.
Сущность изобретения заключается в том, что в способе, при котором подключают обмотку возбуждения к активному добавочному сопротивлению, а обмотку статора - к напряжению питающей сети, измеряют мгновенные значения напряжений на статоре и тока в обмотке возбуждения, определяют скольжение ротора, при достижении скольжением первого заданного значения при каждом провороте ротора относительно поля статора определяют моменты времени для переключений обмотки возбуждения, в соответствии с которыми и чередуют ее подключение к возбудителю с двухполярным форсированным напряжением с подключением к добавочному активному сопротивлению, при достижении скольжением второго заданного значения обмотку возбуждения подключают к возбудителю с постоянным по знаку напряжением, дополнительно измеряют мгновенные значения токов в статоре, определяют знак производной тока в обмотке возбуждения, вычисляют мгновенные значения вращающего электромагнитного момента и фиксируют его максимальные и минимальные значения в течение каждого проворота ротора относительно поля статора, при этом обмотку возбуждения подключают к добавочному активному сопротивлению в моменты фиксации каждого максимального значения вращающего электромагнитного момента, а к возбудителю с форсированным напряжением, полярность которого выбирают совпадающей со знаком производной тока в обмотке возбуждения, подключают в моменты фиксации каждого минимального значения вращающего электромагнитного момента, а подключение обмотки возбуждения к возбудителю с постоянным по знаку напряжением, полярность которого выбирают совпадающей со знаком производной тока в обмотке возбуждения, производят при достижении скольжением второго заданного значения после фиксирования минимального значения вращающего электромагнитного момента, причем вращающий электромагнитный момент m определяют по формуле
m=(Ua-ia Ra)ia+(Ub-ib Rb)ib+
+(Uc-ic Rc)ic, (1) где Ua, Ub и Uc - фазные напряжение статора, В,
ia, ib и ic - фазные токи статора, А,
Ra, Rb и Rc - активные сопротивления обмоток статора, Ом.
Из существующего уровня техники не известно использование максимальных и минимальных мгновенных значений электромагнитного момента синхронного двигателя в асинхронном режиме в течение одного проворота ротора для чередующегося переключения обмотки возбуждения с активного сопротивления на возбудитель с форсированным возбуждением и обратно в режимах пуска и самозапуска. Следовательно, заявляемое техническое решение имеет изобретательский уровень.
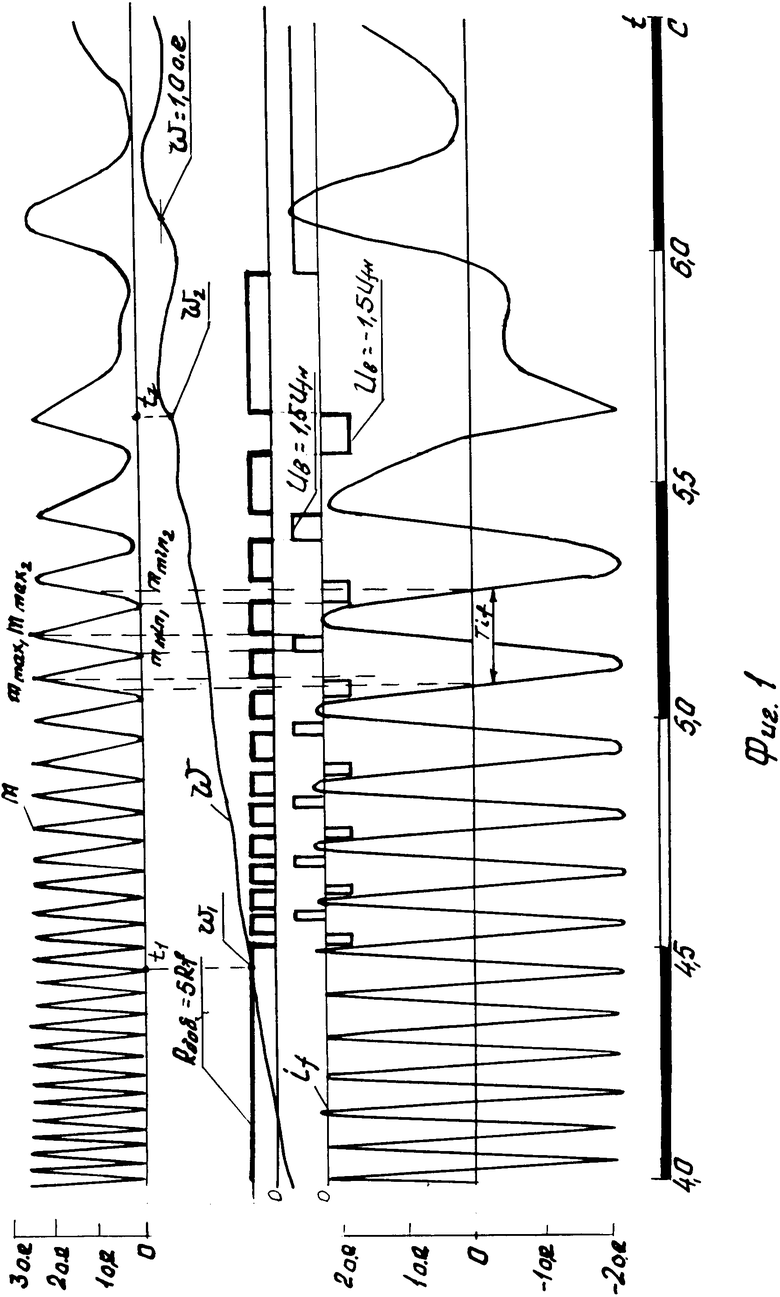
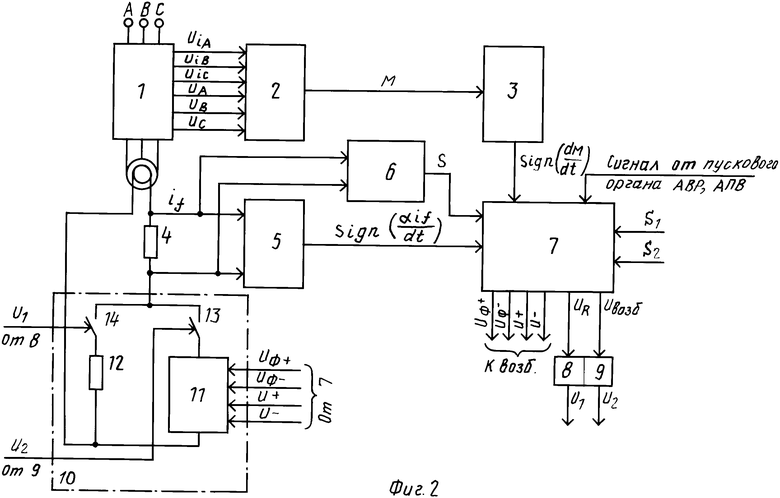
На фиг. 1 представлен фрагмент временной диаграммы пуска синхронного двигателя с использованием предлагаемого способа; на фиг. 2 - устройство, реализующее предлагаемый способ.
Временная диаграмма получена в результате работы математической модели синхронного двигателя с параметрами двигателя типа СТЗ-2460 (загрузка 80%, кратность пускового сопротивления равна 5, коэффициент форсировки 1,5).
Способ заключается в следующем.
При пуске на неподвижный синхронный двигатель подают питание от сети, обмотку возбуждения предварительно замыкают на активное сопротивление Rдоб. Начинается разгон двигателя, в процессе которого измеряют мгновенные значения фазных токов ia, ib и ic и напряжений Ua, Ub и Uc статора, по которым определяют мгновенные значения вращающего электромагнитного момента m по (1) (активные сопротивления обмоток статора Ra, Rb и Rc должны быть заранее известны). При этом фиксируют максимальные и минимальные значения момента m. Измеряют также мгновенные значения тока в обмотке возбуждения if. По длительности периода тока в обмотке возбуждения можно определить скольжения синхронного двигателя S. В процессе разгона двигателя уменьшается скольжения и (на временной диаграмме это момент времени t1, скольжению S1 соответствует скорость w1), когда оно достигает первого заданного значения S1 начинают производить операции переключения обмотки возбуждения в соответствии с моментами фиксации максимумов и минимумов вращающего электромагнитного момента m. Как видно из фиг. 1, электромагнитный момент m во время пуска имеет ярко выраженный колебательный характер, частота колебаний момента относительно его среднего значения зависит от скольжения S и в два раза выше частоты изменения тока if в обмотке возбуждения. На один проворот ротора относительно поля статора (это соответствует первому периоду изменения токов в обмотке возбуждения) приходится два периода изменения момента m.
В течение одного проворота ротора, длительность которого равна Tif, кривая m изменяется таким образом, что имеет два максимума (mmax1 и mmax2) и два минимума (mmin1 и mmin2), и, следовательно, два интервала убывания момента и два интервала возрастания его. Добавочное активное сопротивление Rдоб подключают к обмотке возбуждения каждый раз, когда зафиксируют, что момент m максимален, в течение последующего за этим интервала убывания момента обмотка возбуждения оказывается замкнутой на активное сопротивление и происходит гашение поля обмотки возбуждения. При фиксации минимума момента в процессе его изменения к обмотке возбуждения каждый раз подключают возбудитель с форсированным напряжением на выходе, полярность напряжения возбуждения выбирается такой, чтобы увеличивать ток в обмотке возбуждения. Включение добавочного активного сопротивления Rдоб в цепь обмотки возбуждения при убывании момента m способствует уменьшению фазового сдвига между током if и наводимой вращающимся полем статора в обмотке возбуждения ЭДС, и, следовательно, замедлению убывания m. Подключение возбудителя с форсированным напряжением к обмотке возбуждения на интервалах возрастания момента обеспечивает введение в цепь обмотки возбуждения ЭДС, включенной согласно с ЭДС, наводимой вращающимся полем статора, что обеспечивает дополнительный рост тока if, а значит и момента m. Указанные мероприятия позволяют повысить среднее значение m в течение одного проворота ротора и в целом за время действия циклического возбуждения, чередующегося с гашением поля обмотки возбуждения. При достижении скольжением S второго заданного значения S2 (на временной диаграмме это момент t2 достижения скоростью вращения двигателя значения w2) обмотку возбуждения подключают к возбудителю с постоянным по знаку напряжением, выбирая для этого ближайший по времени момент фиксации минимума m. Полярность напряжения возбудителя в момент этого подключения выбирается совпадающей со знаком производной тока в обмотке возбуждения. Подача постоянного по знаку напряжения возбуждения приводит к втягиванию двигателя в синхронизм. При самозапуске при скольжениях, больших первого заданного значения, обмотка возбуждения должна быть замкнута на Rдоб, при скольжениях, меньших первого заданного значения, все происходит так же, как при пуске.
Устройство состоит из блока 1 измерительных преобразователей (БИП), датчика 2 момента (ДМ), блока 3 дифференцирования момента (БДМ), измерительного шунта (Ш) 4, блока 5 дифференцирования тока в обмотке возбуждения (БДТ), датчика 6 скольжения (ДС), блока 7 логики (БЛ), формирователей 8 и 9 управляющих напряжений (Ф), возбудителя (В) 10, состоящего из управляемого источника 11 напряжения (УИН), добавочного сопротивления R 12, быстродействующих коммутаторов (К) 13 и 14. БИП 1 содержит трансформаторы тока и напряжения, с выходов его напряжения UiA, UiB, UiC, UA, UB, UC, пропорциональные мгновенным значениям фазных токов и напряжений статора, поступают на входы ДМ 2, с помощью которого вычисляются мгновенные значения момента m в соответствии с формулой (1). ДМ 2 содержит блоки перемножения и суммирующие операционные усилители. С выхода ДМ 2 напряжение, пропорциональное m, поступает на вход БДМ 3, имеющего компаратор на выходе. Выходным сигналом этого блока является напряжение, принимающее два дискретных значения в процессе своего изменения: ОВ, когда момент возрастает и отличное от ОВ, когда момент убывает. Это напряжение поступает на один из входов БЛ 7. На другие входы блока логики поступают следующие сигналы: напряжение, пропорциональное скольжению S с ДС 6 (предполагается, что скольжение определяется путем измерения длительности периода Тif тока if в обмотке возбуждения), напряжение с БДТ 5 в обмотке возбуждения (так же, как в БДМ 3, выходное напряжение БДТ 5 принимает два дискретных значения), напряжения соответствующие уставкам по скольжению S1 и S2, сигнал от пускового органа АВР, АПВ. БЛ 7 осуществляет управление работой В 10 в соответствии с заявляемым способом. Он содержит схемы сравнения, которые определяют в каждом из трех диапазонов изменяется текущее скольжение S и в соответствии с результатами сравнения осуществляет, учитывая знак производной момента и производной тока в обмотке возбуждения выдачу на выходы сигналов Uф+, Uф-, U+, U-, UR, Uвозб, управляющих работой В 10. Первые четыре сигнала управляют работой УИН 14, настраивая его соответственно на выдачу положительного или отрицательного, форсированного или нефорсированного напряжения возбуждения. Сигналы UR, Uвозб, проходя через Ф8 9, попадают на управляющие органы быстродействующих К 12 и 11. Таким образом обеспечиваются два режима работы В 10 - гашение и возбуждение. Работа устройства при самозапуске отличается от работы при пуске тем, что при перерыве питания синхронного двигателя на БЛ 7 поступает сигнал от пускового органа АВР, АПВ. Блок логики выдает сигнал UR, появление которого приводит к замыканию обмотки возбуждения на активное добавочное сопротивление и гашению поля обмотки возбуждения. После восстановления питания двигателя на выходе пускового органа АВР, АПВ сигнал исчезает и происходит разгон по схеме с пусковым сопротивлением, далее все происходит так же, как при пуске, который описан выше.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УМЕНЬШЕНИЯ ДЕЙСТВИЯ ПУСКОВОГО ТОКА СИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ НАПРЯЖЕНИЕМ ВЫШЕ 1000 В И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2357353C1 |
| СПОСОБ ПУСКА И БЕСЩЕТОЧНОГО ВОЗБУЖДЕНИЯ БЕСКОНТАКТНОЙ СИНХРОННОЙ МАШИНЫ | 2012 |
|
RU2498491C2 |
| СПОСОБ УПРАВЛЕНИЯ ВОЗБУЖДЕНИЕМ СИНХРОННОЙ МАШИНЫ | 2002 |
|
RU2242080C2 |
| Способ измерения индуктивности рассеяния обмотки статора синхронной машины | 1985 |
|
SU1330591A1 |
| Способ защиты синхронного электропривода насоса | 1990 |
|
SU1779793A1 |
| СПОСОБ КВАЗИЧАСТОТНОГО МЯГКОГО ПУСКА СИНХРОННОГО ДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2277289C1 |
| Способ защиты синхронных двигателей от асинхронного хода | 1986 |
|
SU1411874A1 |
| Способ определения индуктивных и активных сопротивлений электрической машины | 1990 |
|
SU1818601A1 |
| Способ определения индуктивного сопротивления рассеяния обмотки статора синхронной машины | 1990 |
|
SU1810849A1 |
| Способ пуска синхронного двигателя с блоком пуска | 1990 |
|
SU1753568A1 |
Использование: в электротехнике, а именно в системах возбуждения синхронного электропривода. Сущность: повышение асинхронного момента в режимах пуска достигается за счет оптимального управления возбуждением в функции от электромагнитного момента. При этом на интервале изменения скольжения до первого заданного значения происходит разгон двигателя с применением пускового сопротивления, на интервале изменения скольжения от первого до второго заданного значения циклически переключают обмотку возбуждения с активного сопротивления на возбудитель с двухполярным форсированным напряжением и обратно в моменты достижения вращающим электромагнитным моментом соответственно минимальных и максимальных мгновенных значений. Для вычисления вращающего электромагнитного момента используют мгновенные значения фазных токов и напряжений статора. На интервале скольжений, меньших второго заданного значения, осуществляют подачу постоянного по знаку напряжения возбуждения, благодаря чему двигатель втягивается в синхронизм. 2 ил.
СПОСОБ ПУСКА И САМОЗАПУСКА СИНХРОННОГО ДВИГАТЕЛЯ, при котором подключают обмотку возбуждения к активному добавочному сопротивлению, а обмотку статора к напряжению питающей сети, измеряют мгновенные значения напряжений на статоре и тока в обмотке возбуждения, определяют скольжение ротора, при достижении скольжением первого заданного значения при каждом провороте ротора относительно поля статора определяют моменты времени для переключений обмотки возбуждения, в соответствии с которыми и чередуют ее подключение к возбудителю с двухполярным форсированным напряжением с подключением к добавочному активному сопротивлению, при достижении скольжением второго заданного значения обмотку возбуждения подключают к возбудителю с постоянным по знаку напряжением, отличающийся тем, что дополнительно измеряют мгновенные значения токов в статоре, определяют знак производной тока в обмотке возбуждения, вычисляют мгновенные значения вращающего электромагнитного момента и фиксируют его максимальные и минимальные значения в течение каждого проворота ротора относительно поля статора, при этом обмотку возбуждения подключают к добавочному активному сопротивлению в моменты фиксации каждого максимального значения вращающего электромагнитного момента, а к возбудителю с форсированным напряжением, полярность которого выбирают совпадающей со знаком производной тока в обмотке возбуждения, подключают в моменты фиксации каждого минимального значения вращающего электромагнитного момента, а подключение обмотки возбуждения к возбудителю с постоянным по знаку напряжением, полярность которого выбирают совпадающей со знаком производной тока в обмотке возбуждения, производят при достижении скольжением второго заданного значения после фиксирования минимального значения вращающего электромагнитного момента, причем вращающий электромагнитный момент m определяют по формуле
m = (Uа - iа · Rа)iа + (Uв - iвRв)iв + (Uс - iсRс)iс,
где Uа, Uв, Uс - фазные напряжения статора, В;
iа, iв, iс - фазные точки статора, А;
Rа, Rв, Rс - активные сопротивления обмоток статора, Ом.
