Изобретение относится к автоматизированному электроприводу переменного тока с тиристорным регулятором напряжения, а именно к автоматическому регулированию напряжения асинхронных двигателей, работающих в условиях периодически изменяющейся нагрузки, и может быть использовано в электроприводе механизмов непрерывного грузопассажирского транспорта (эскалаторов метро, конвейеров, канатных дорог и т.п.) для экономии электроэнергии.
Известен ряд способов регулирования напряжения асинхронного двигателя, обеспечивающих рациональное энергопотребление. Все они сводятся к прямому или косвенному выявлению одного из пяти параметров асинхронного двигателя (скорости, скольжения, коэффициента мощности, КПД коэффициента статической перегружаемости) и построению системы стабилизации этого параметра для поддержания высоких значений коэффициентов мощности и полезного действия асинхронного двигателя при глубоком изменении нагрузки.
Однако, независимо от того, по какому параметру осуществляется регулирование напряжения двигателя, эффективность потребления электроэнергии в двигательном режиме и эффективность генерации энергии в тормозных режимах работы асинхронной машины определяется прежде всего способом фазового регулирования переменного напряжения.
Известен способ регулирования переменного напряжения, выполненного в виде двух встречно-параллельно соединенных тиристоров, включенных в каждую фазу обмотки статора асинхронного двигателя и устройства реализации способа регулирования угла включения тиристоров, например, в функции скорости двигателя или в функции коэффициента мощности двигателя.
Недостатком данного способа является то, что при управлении двигательными режимами работы асинхронной машины, регулирование напряжения осуществляется с отстающим фазовым сдвигом первой гармоники относительно напряжения сети, а в режиме генераторного торможения с опережающим сдвигом первой гармоники, что снижает коэффициент мощности сети как в двигательном, так и в генераторном режимах работы асинхронного электропривода.
За прототип выбран способ регулирования напряжения углом включения α и углом выключения β тиристоров полностью управляемых тиристорных ключей с двухсторонней проводимостью, при котором углы коммутации тиристоров связаны выражением β= π - α .
При данном способе обеспечивается регулирование напряжения питания асинхронного двигателя без сдвига первой гармоники относительно напряжения сети в процессе стабилизации угла ϕ двигателя при положительном и отрицательном скольжении, используя, например, систему регулирования с косвенным измерением скольжения через ток и напряжение статора.
В результате этого тиристорный ключ не ухудшает cos ϕ сети. Однако, он не улучшает его, так как при таком способе регулирования не достигается компенсация реактивной мощности сети.
Цель изобретения - улучшение коэффициента мощности сети.
Сущность изобретения заключается в том, что связь между углами включения α и выключения β тиристоров регулятора, связанных между собой выражением β= =π - α, устанавливают в режиме холостого хода двигателя, в котором значения углов , и α = αo, β = βo и αo < β фиксируют таким, что скорость двигателя сохраняется на уровне его номинального значения, а в двигательном режиме осуществляется изменением угла α в диапазоне от "+" αo до "-" β, и в генераторном режиме торможения изменением угла β в диапазоне от βo до π + αo , при этом изменение угла α производится в соответствии с рассогласованием сигналов, пропорциональных ctg ϕ и ctg ϕн1, а изменение угла β в соответствии с рассогласованием отрицательных сигналов, пропорциональных ctg ϕ и ctg ϕн2, где ϕ, ϕн1 и ϕн2 соответственно текущее значение угла между током и напряжением обмотки статора и его значения при положительном и отрицательном номинальном скольжении двигателя.
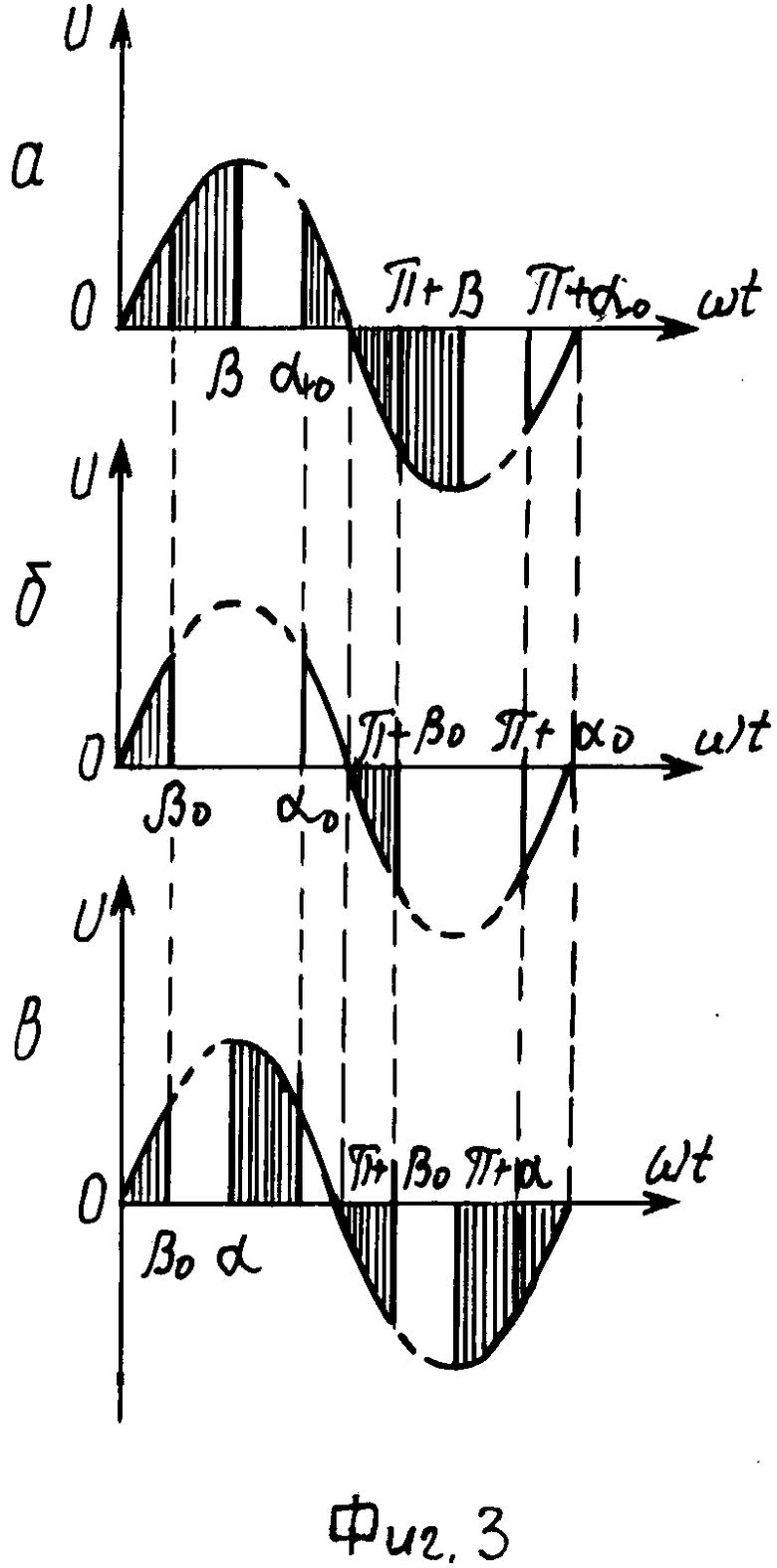
На фиг. 1 изображена схема одного из возможных устройств, реализующих предлагаемый способ; на фиг. 2 и 3 - временные диаграммы двух вариантов способа при αo < π / 2 и αo > π / 2 радиан, которые иллюстрируют принцип действия способа при работе асинхронной машины соответственно в двигательном режиме (фиг. 2а и 3а), в режиме потребления реактивной мощности (фиг. 2б и 3б) и в генераторном режиме торможения (фиг. 2в и 3в).
Устройство состоит из трехфазного тиристорного коммутатора 1, выполненного на трех однофазных полностью управляемых тиристорных ключах с двухсторонней проводимостью, системы импульсно-фазового управления тиристорами, состоящей из первого и второго блоков 2 и 3, формирующих соответственно импульсы с углом включения α и углом выключения β тиристоров полностью управляемых тиристорных ключей, двух элементов 4 и 5 сравнения, первого и второго диодов 6 и 7, двух однофазных трансформаторов 8 и 9 тока, датчика 10 котангенса угла между током и напряжением асинхронного двигателя 11.
Для реализации первого варианта способа на схеме (фиг. 1) связи между элементами 4 и 5 сравнения и блоками 2 и 3 системы управления показаны сплошными линиями, а для второго варианта - пунктирными.
Принцип действия способа заключается в следующем.
В режиме потребления асинхронным двигателем 11 реактивной мощности (фиг. 2б и 3б) углы коммутации связаны выражением β = π - α и соответственно равны α = αo и β = βo , при которых на двигатель 11 подается минимальное напряжение, близкое к нулю, с целью максимального снижения реактивной мощности. Этот режим возникает при переходе асинхронной машины из режима холостого хода в режим генераторного торможения, когда к валу двигателя 11 подводится механическая энергия Wо. Эта энергия поддерживает вращение машины со скоростью, близкой к скорости идеального холостого хода даже при минимальном напряжении, и создает возможность для снижения до минимума потребляемую из сети реактивную мощность.
Изменение механической энергии на валу двигателя 11 в сторону уменьшения (увеличения) от значения Wо переводит машину в двигательный фиг. 2а, фиг. 3а (генераторный фиг. 2в и 3в) режим, при котором сигнал с датчика 10 обратной связи, пропорциональный котангенсу угла ϕ между током и напряжением двигателя 11 от значения, равного нулю (ϕ=π/2), возрастает и имеет положительный (отрицательный) знак, так как ϕ< π/2 (ϕ> π/2). Сигнал с датчика 10 обратной связи с положительным (отрицательным) знаком и пропорциональный ctg ϕ сравнивается на элементе 4 (элементе 5) сравнения с заданным значением ctg ϕн1 (ctg ϕн2), которые соответствуют отношению активной мощности к реактивной при номинальном положительном (отрицательном) скольжении машины, и результирующий сигнал, пропорциональный разности ctg ϕ-ctg ϕн1 (ctg ϕ-ctg ϕн2), в первом варианте способа подается на блок 2 (блок 3) системы управления углом включения α (углом выключения β) тиристоров полностью управляемых тиристорных ключей трехфазного коммутатора 1.
Выявление положительного (отрицательного) сигнала обратной связи и его воздействие именно на угол включения α (угол выключения β) тиристоров может производиться, например, при помощи диода 6 (диода 7), включенного в прямом (обратном) направлении, как показано на фиг. 1.
Во втором варианте предлагаемого способа в процессе регулирования напряжения (см. фиг. 3) углы коммутации α и β меняются ролями. На схеме (фиг. 1) это отражено пунктирными линиями.
При таком управлении осуществляется регулирование амплитуды тока двигателя с постоянной фазой ϕн1 в двигательном (ϕн2 в генераторном) режиме работы машины, формируя вектор тока статора по касательной к семейству круговых диаграмм, а также компенсация реактивной мощности сети за счет опережения (отставания) первой гармоники напряжения питания асинхронного двигателя относительно напряжения сети и соответственно уменьшения (увеличения) при этом угла ϕ1 между током и напряжением сети в двигательном (генераторном) режиме, приближая его к 0 радианам (к π радианам). В результате осуществляется стабилизация коэффициента мощности асинхронного двигателя и его компенсация при работе привода на подъем и на спуск груза.
Первый и второй варианты способа требуют наладки привода, а именно: настройки углов α = αo и β = βo (см. фиг. 2б и 3б), контролируя, например, по нулю сигнала, снимаемого с датчика 10 обратной связи, режим потребления реактивной мощности. Это можно производить в условиях эксплуатации привода при работе, например, эскалаторов на спуск пассажиров, а горных транспортеров-брэмзбергов на опускание породы или в условиях стендовых испытаний с дополнительным гонным двигателем, что усложняет наладку.
Для упрощения наладки системы управления приводом при обеспечении устройством высокого значения коэффициента мощности сети предлагается еще вариант способа, в котором следует устанавливать связь между углами коммутации при работе устройства на двигатель, отключенный от механизма, так как на холостом ходу привода механизмов непрерывного транспорта двигатель загружен на 20-40%.
При реализации способа в качестве сигнала обратной связи используется сигнал, пропорциональный ctg ϕ. Это не единственное решение. В качестве сигнала обратной связи может быть использован сигнал, пропорциональный скольжению, коэффициенту мощности и др., который при переходе машины из двигательного режима в режим генераторного торможения меняет свой знак на противоположный и не имеет прерывистого характера.
Применение в заявляемом способе обратной связи собственно по ctg ϕ предпочтительнее из-за упрощения реализации и повышения точности регулирования.
Применение изобретения наиболее целесообразно для асинхронных электроприводов транспортных машин непрерывного действия, работающих как на подъем, так и на спуск груза в условиях периодически меняющейся нагрузки.


Использование: в электроприводах машин непрерывного действия: экскалаторов, канатных дорог, промышленных транспортеров и т.п. Сущность изобретения заключается в регулировании углов включения и выключения тиристоров полностью управляемых тиристорных ключей в функции ctgϕ между током и напряжением статора АД, причем положительный сигнал обратной связи, пропорциональный ctgϕ, воздействует на угол включения, а отрицательный - на угол выключения тиристоров таким образом, что обеспечивается стабилизация коэффициента мощности, асинхронного двигателя и его компенсация как в двигательном режиме, так и в режиме генераторного торможения. Наиболее целесообразной областью применения заявляемого способа является асинхронный электропривод машин грузопассажирского транспорта непрерывного действия, работающий на подъем и спуск груза в условиях периодически изменяющейся нагрузки. 3 ил.
СПОСОБ ФАЗОВОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ С ТИРИСТОРНЫМ РЕГУЛЯТОРОМ НАПРЯЖЕНИЯ, при котором осуществляют изменение угла включения α и угла выключения β тиристоров регулятора, связанных между собой выражением β = π-α , отличающийся тем, что, с целью повышения коэффициента мощности сети, связь между углами α и β устанавливают в режиме холостого хода двигателя, в котором значения углов α = α0 ; β = β0 ; α0< β0 фиксируют такими, чтобы скорость двигателя сохранялась на уровне его номинального значения, а в двигательном режиме осуществлялась изменением угла α в диапазоне от "+" α0 до "-" β0 и в генераторном режиме торможения изменением угла β в диапазоне от β0 до π+α0 , при этом изменение угла α производят в соответствии с рассогласованием сигналов, пропорциональных ctgϕ и ctg ϕn1 , а изменение угла β - в соответствии с рассогласованием сигналов, пропорциональных ctgϕ и ctgϕn2, где ϕ , ϕn1 и ϕn2 - соответственно текущее значение угла между током и напряжением обмотки статора и его значения при положительном и отрицательном номинальном скольжении двигателя.
