Изобретение относится к автоматическому управлению и регулированию и может быть использовано при создании систем управления приводами ротационных испытательных машин.
Целью изобретения является повышение точности воспроизведения заданной траектории движения планшайбы в динамических режимах.
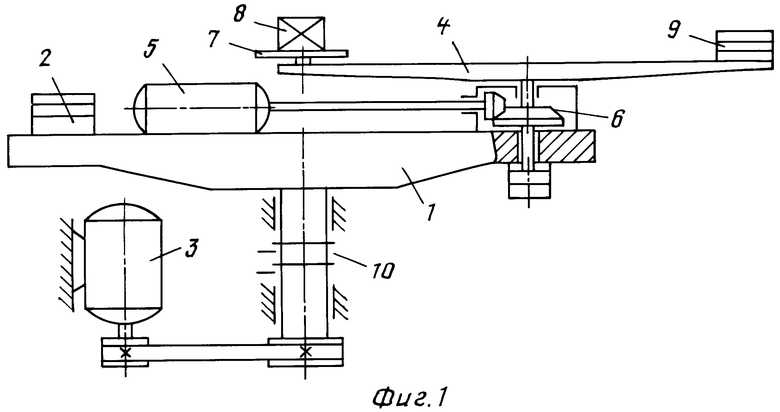
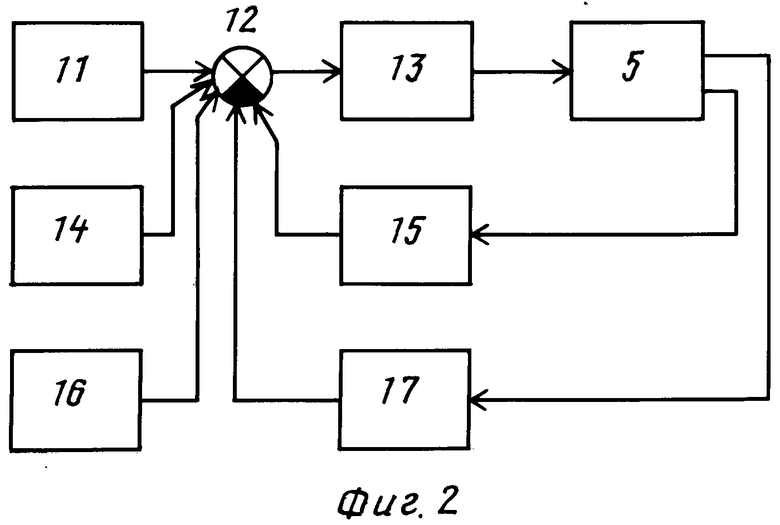
На фиг.1 показана ротационная машина, вид сбоку; на фиг.2 - система управления приводом планшайбы ротационной машины.
Ротационный стенд содержит платформу 1 с противовесом 2, приводимую во вращение приводом 3, установленную на периферии платформы 1 планшайбу 4, ось вращения которой параллельная оси вращения платформы, снабженная индивидуальным приводом в виде двигателя 5 постоянного тока, закрепленного на платформе 1 и связанного с планшайбой посредством редуктора 6.
На одном плече планшайбы установлен поворотный стол 7 для закрепления испытуемого изделия 8, а на другом - противовес 9. Съем и передача измерительной и управляющей информации осуществляются посредством токосъемника 10.
Стенд работает следующим образом.
Платформа 1 раскручивается приводом 3 до расчетной угловой скорости, которая в дальнейшем поддерживается постоянной. Приводом 5 программно изменяют угловое положение планшайбы 4, при этом по заранее рассчитанному закону от 0 до максимального значения изменяется радиус вращения изделия, на которое воздействует заданное линейное ускорение.
Система управления приводом планшайбы 4 размещена на неподвижном основании и включает задатчик 11 программного углового движения планшайбы 4, сумматор 12, усилитель 13, привод планшайбы в виде двигателя постоянного тока 5, задатчик 14 и датчик 15 углового положения планшайбы, задатчик 16 и датчик 17 угловой скорости планшайбы.
Воспроизводимое в расчетной точке изделия 8 абсолютное ускорение Wa(t) определяется параметрами движения платформы и планшайбы
Wa= F( , ϕ2,
, ϕ2,  ,
,  ), (1) где
), (1) где  - угловая скорость платформы,
- угловая скорость платформы,  = const;
= const;
ϕ2,  ,
,  - угловые перемещения, скорость и ускорения планшайбы 4.
- угловые перемещения, скорость и ускорения планшайбы 4.
По заданному закону изменения абсолютного ускорения из кинематической модели (1) определяют параметры движения планшайбы ϕ2(t),  (t),
(t),  (t).
(t).
Движение планшайбы описывается дифференциальным уравнением следующего вида: J2+G(ϕ2,
J2+G(ϕ2,  =U, (2) где I2 - момент инерции планшайбы;
=U, (2) где I2 - момент инерции планшайбы;
G - некоторая функция;
U - управление;
ϕ2,  ,
,  - параметры движения планшайбы (угол, скорость, ускорение).
- параметры движения планшайбы (угол, скорость, ускорение).
Подставляя полученные из (1) параметры движения в (2), определяют управление U(t), электрический аналог которого заносится в задатчик 11 программного движения планшайбы. В задатчики 14 и 16 заносится информация об угловых перемещениях и скорости планшайбы соответственно.
Система управления приводом планшайбы работает следующим образом.
При отсутствии в реальной системе диссипативных сил разомкнутая подсистема, состоящая из задатчика 11, усилителя 13 и двигателя 5, точно воспроизводит расчетные параметры движения планшайбы, так как расчет управления производится по полной динамической модели стенда.
Вследствие наличия в реальной системе диссипативных сил, вентиляторных нагрузок и помех воспроизводимый закон движения планшайбы отличается от расчетного.
При этом на выходе сумматора 12 появляются сигналы, пропорциональные ошибкам отработки угла и угловой скорости планшайбы, которые складываются с основным задающим воздействием задатчика 11, что позволяет уменьшить динамические ошибки движения планшайбы.
Применение подобной системы управления позволило уменьшить величину динамических ошибок приблизительно в 2 раза по сравнению с прототипом.
Изобретение относительно к автоматическому управлению и регулированию и может быть использовано при создании систем управления приводами ротационных испытательных машин. Целью изобретения является повышение точности воспроизведения заданной траектории движения планшайбы в динамических режимах. Система управления содержит задатчик программного углового движения планшайбы, сумматор, усилитель, привод планшайбы в виде двигателя постоянного тока, задатчик и датчик углового положения планшайбы, задатчик и датчик угловой скорости планшайбы. Применение системы управления позволяет уменьшить величину динамических ошибок приблизительно в 2 раза. 2 ил.
СИСТЕМА УПРАВЛЕНИЯ ПРИВОДОМ ПЛАНШАЙБЫ РОТАЦИОННОЙ МАШИНЫ, содержащая последовательно соединенные задатчик программного углового движения планшайбы, сумматор, усилитель, привод планшайбы, отличающаяся тем, что, с целью повышения точности воспроизведения заданной траектории движения планшайбы в динамических режимах, в систему введены задатчик и датчик углового положения планшайбы и задатчик и датчик угловой скорости планшайбы, выходы которых подключены к соответствующим входам сумматора, а входы датчиков углового положения и угловой скорости планшайбы соединены с выходами привода планшайбы.
| Попков С.Л | |||
| Следящие системы | |||
| М.: Высшая школа, 1963, с.85-86. |
