Изобретение относится к измерительной технике и может быть использовано в строительстве, в частности для оценки параметров углубления сваи в грунт. Важным параметром такой оценки, согласно существующим нормам, является углубление сваи в грунт за один или несколько ударов, число ударов молотом по свае, размер части сваи, углубленной в грунт.
Известны устройства для измерения линейных перемещений, разработанные с использованием различных физических закономерностей [1]. Существенный недостаток использования измерителей с применением лазеров - их низкая эффективность в условиях значительных вибраций. При использовании лазерных измерителей необходимо считаться с нестабильным вертикальным отклонением сваи от удара к удару, которое потребует постоянной ручной настройки или сложной системы слежения.
Наиболее близким техническим решением к изобретению является измерительный преобразователь перемещения [2], включающий резисторную дорожку с зажимами, ползунок, перемещающийся вдоль дорожки, подпружиненную фольгу, упруго прижимающуюся к зажимам резисторной дорожки при перемещении ползунка.
Недостатком этого решения является то, что устройство предназначено для измерения незначительных перемещений, поскольку фольга играет роль токопроводящей прокладки между ползунком и зажимом, должна быть достаточно тонкой, а следовательно, не может быть длинной. В условиях вибрации прижим фольги к зажиму не будет фиксированным, что внесет значительную ошибку при преобразовании перемещения в электрический сигнал и приведет к быстрому механическому износу фольги в зоне подвижного контакта фольги и зажима. Все это не позволяет использовать известное устройство для оценки линейного перемещения сваи.
Цель изобретения вытекает из того, что в связи с массовой застройкой намывных и глинистых площадей имеющее место деформация или неравномерная осадка зданий увязывается, как правило, с некачественной забивкой свай или с их недостаточным количеством. Изобретение позволяет оценивать углубление сваи в грунт в рамках существующих норм по таким показателям, как величина допустимого углубления сваи в грунт за 10 ударов молотом, величина углубленной в грунт части сваи, общее число ударов по свае.
Сущность изобретения заключается в том, что прибор контроля параметров движения содержит орган слежения, выполненный в виде установленного с возможностью перемещения по направляющим ползунка, предназначенного для взаимодействия с подвижным объектом, измеритель перемещения, выполненный в виде резисторной дорожки, с присоединенным к нему источником питания и пультом управления. Прибор снабжен телескопически связанными раздвижными и опорной трубками, причем раздвижные трубки имеют полуцилиндрические пластины с токосъемными электродами и роликом скольжения, а на поверхности опорной трубки закреплены нормированная сетка токопроводящих полос и резисторная дорожка. Датчик удара закреплен на ползунке, который выполнен в виде пары установленных с зазором пластин и закрепленных на них двух магнитов. Пульт управления состоит из двух блоков управления, входы которых соединены гибким кабелем с резисторной дорожкой, нормированной сеткой токопроводящих полос и датчиком ударов, а также индикатора перемещения за один или несколько ударов и счетчики общего количества ударов, присоединенных к выходам соответствующего блока.
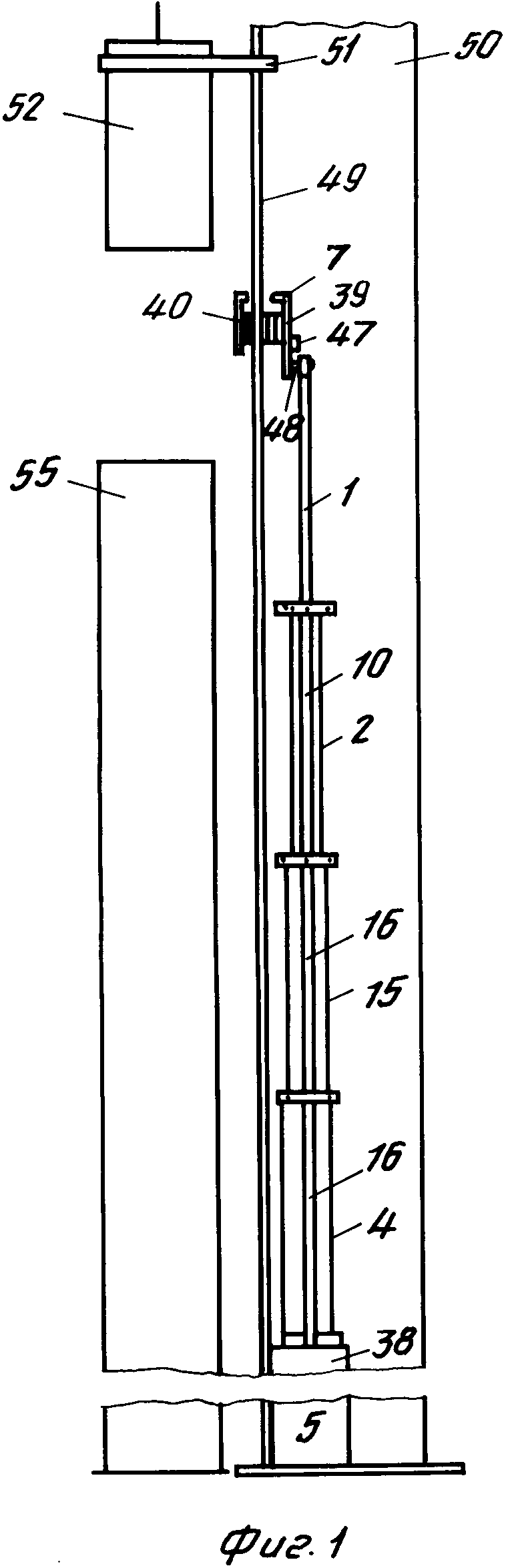
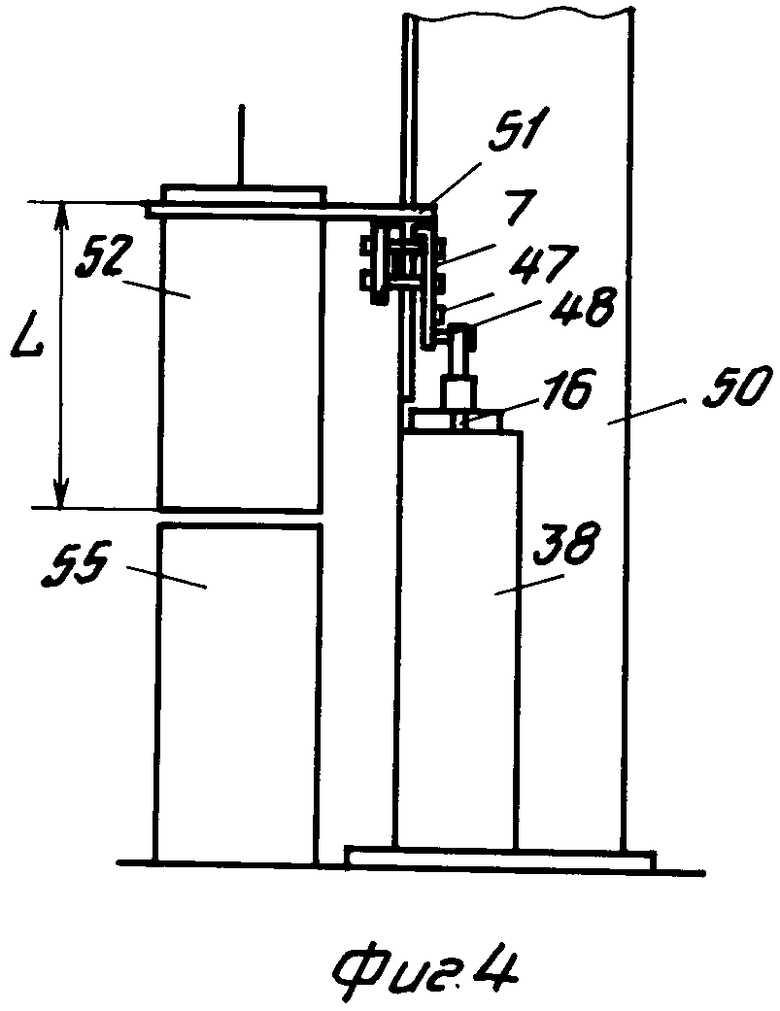
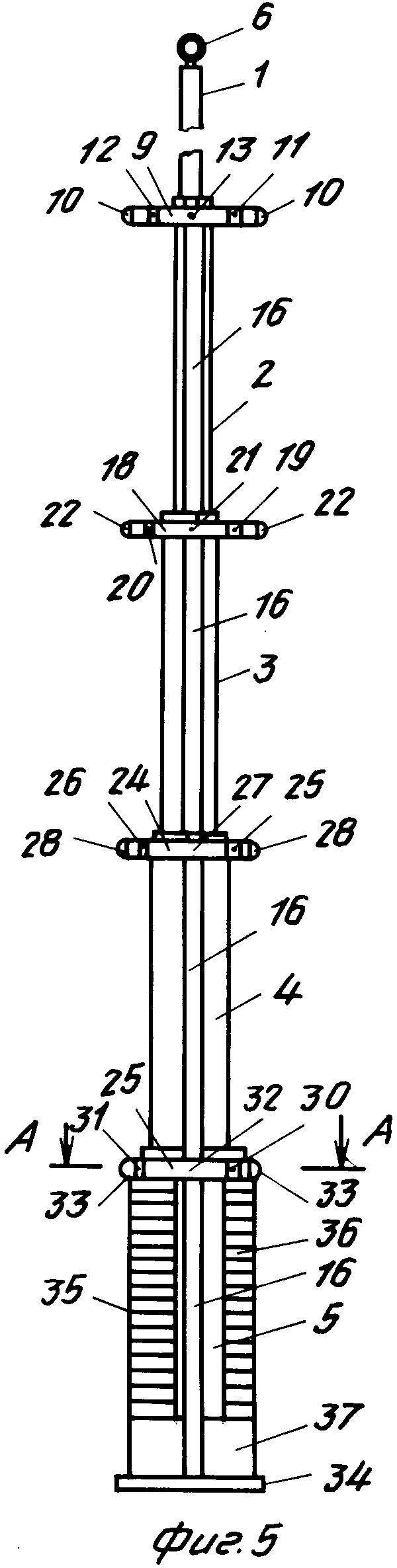
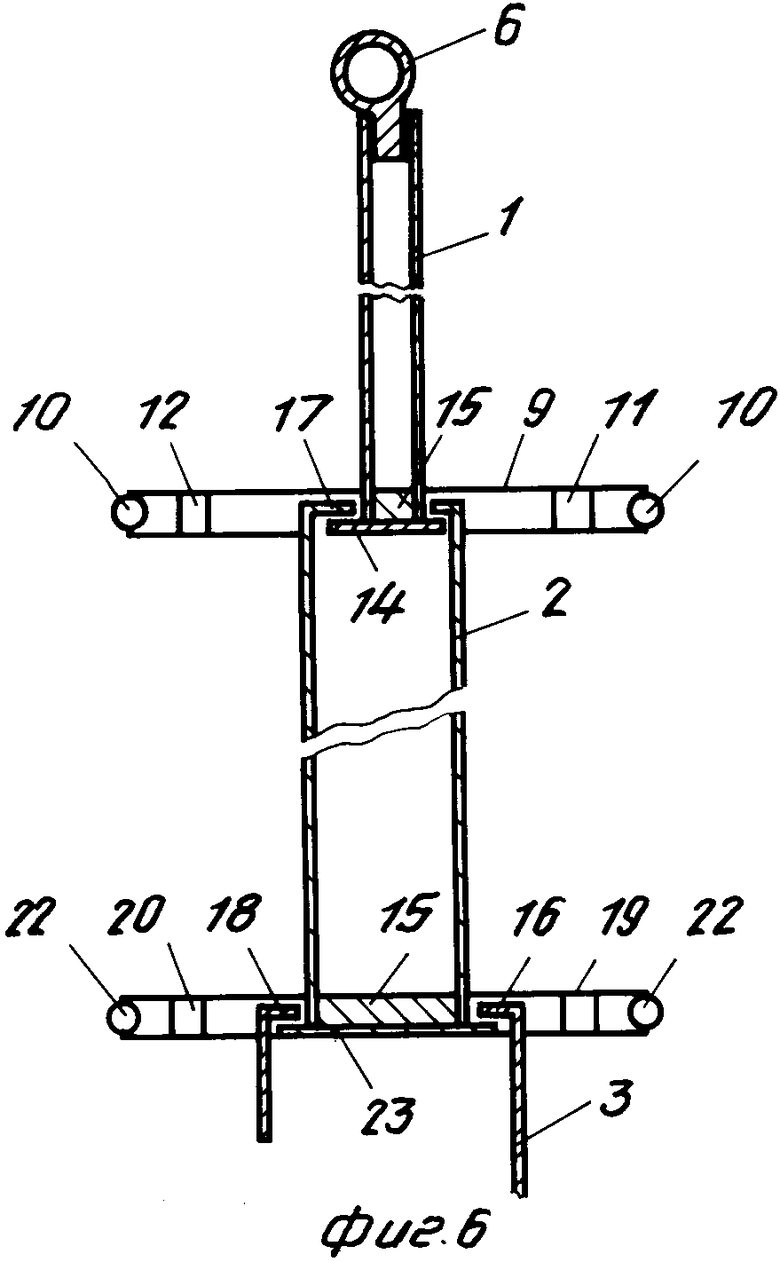
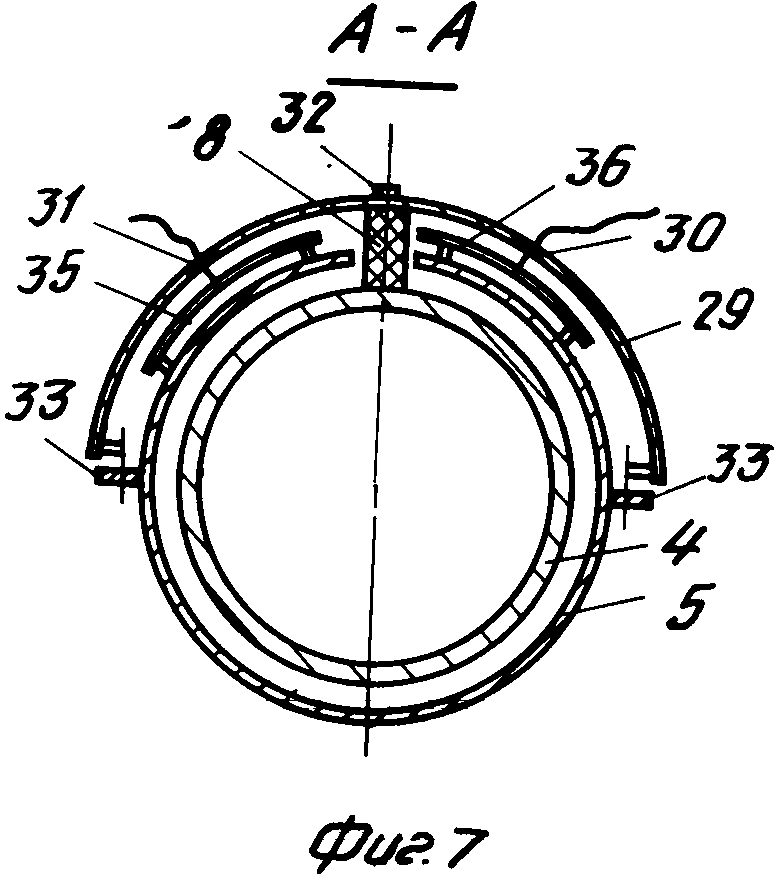
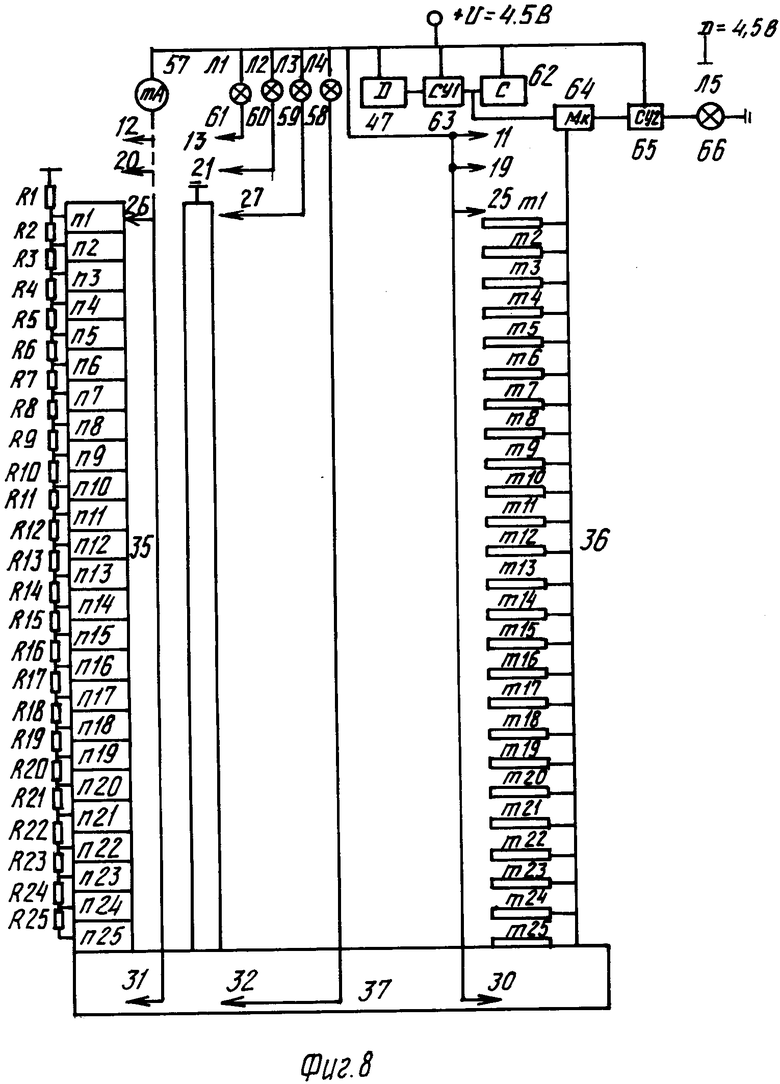
На фиг. 1 показано положение органа слежения прибора, когда высота незабитой в грунт части сваи превышает 2500 мм (начальная стадия измерения); на фиг.2-4 - то же, когда высота незабитой в грунт части сваи не превышает 500 мм (конечная стадия измерения); на фиг.5 и 6 - устройство раздвижных и токосъемных элементов прибора; на фиг.7 - разрез А-А на фиг.5; на фиг.8 - блок-схема прибора; на фиг.9 - принципиальная электрическая схема.
Прибор включает в себя орган слежения перемещения сваи в процессе ее углубления, состоящей из пяти телескопически связанных раздвижных трубок 1,2,3,4 и 5. Трубка 1 имеет наименьший диаметр. Верхняя ее часть соединена через отверстие 6 с магнитным ползунком 7. На нижнем конце трубки 1 закреплен штифт из диэлектрика 8. Устройство нижнего конца трубки 4 аналогично устройству трубок 1,2 и 3. На штифте 8 закреплена жесткая стальная полуцилиндрическая пластина 9, на концах которой имеются ролики скольжения 10, вмонтированы два токосъемных электрода 11 и 12 и корпусной зажим 13. С помощью фланца 14 трубка 1 соединена с трубкой 2. Трубки 1,2,3 и 4 имеют бронзовые пробки 15. В отличие от трубки 1 трубки 2,3,4 и 5 имеют продольные прорези 16, играющие роль направляющих перемещения штифтов 8 соответствующих трубок при их взаимном перемещении. Так, штифт 8 трубки 1 входит в прорезь 16 трубки 2, штифт 8 трубки 2 входит в прорезь 16 трубки 3, штифт 8 трубки 3 входит в прорезь 16 трубки 4, а штифт 8 трубки 4 входит в прорезь 16 трубки 5. Продольные прорези 16 - не сквозные. Они начинаются с верхнего торца и не доходят до нижних торцов на величину, позволяющую на поверхности трубок закрепить штифт 8. Трубка 5 имеет сквозную прорезь 16. Диаметры трубок подобраны так, чтобы они свободно входили одна в другую по мере их взаимного перемещения.
Трубка 2 в своей верхней части имеет фланец 17, который при взаимодействии с фланцем 14 обеспечивает связь трубок 1 и 2. В своей нижней части трубка 2 имеет штифт 8, на котором закреплена полуцилиндрическая пластина 18 с электродами 19 и 20, корпусной зажим 21 и ролики скольжения 22, а также фланец 23 для связи с трубкой 3.
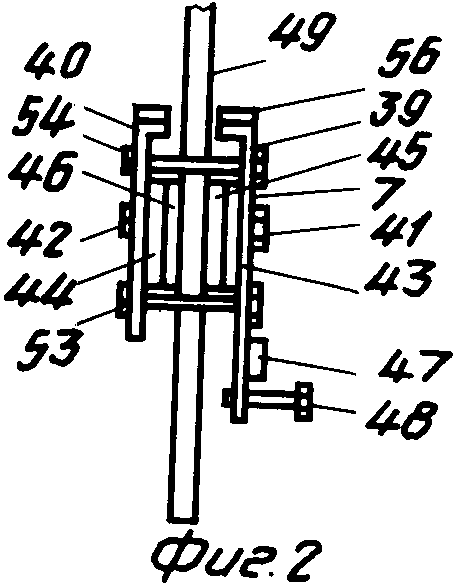
Устройство трубок 2,3 и 4 аналогично. Трубка 3 имеет полуцилиндрическую пластину 24, электроды 25 и 26, корпусной зажим 27, ролики скольжения 28. Трубка 4 имеет полуцилиндрическую пластину 29, электроды 30 и 31, корпусной зажим 32, ролики скольжения 33. На поверхности трубки 5 закреплена резисторная дорожка 35, состоящая из двадцати пяти токопроводящих полос n1-n25, соединенных между собой резисторами R1-R25, и плата 36, состоящая из изолированных токопроводящих полос m1-m25 (фиг.8). Ширина пластины n - 20 мм, ширина полосы m - 1 мм. Полосы разнесены на расстояние 20 мм. Система полос m1-m25 формирует нормальную сетку токопроводящих полос. В нижней части трубки 5 закреплены разрезной цилиндр 37 из диэлектрика. Вся поверхность трубки 5 имеет защитный кожух 38. В сечение А-А вошли стенки трубки 4 и 5, штифт 8 трубки 4 с полуцилиндрической пластиной 29, в которую вмонтированы электроды 30 и 31, корпусной зажим 32, ролики 33, скользящие по поверхности трубки 5 при вдвижении трубки 4 в объем трубки 5. Электрод 30 контактирует с платой 36, а электрод 31 - с платой 35. Ползунок 7 состоит из двух фигурных пластин 39 и 40, к которым с помощью болтов 41 и 42 крепятся кольцевые постоянные магниты 43 и 44 и стальные шайбы скольжения 45 и 46.
К пластине 39 крепятся датчик ударов 47 и штырь 48, с помощью которого ползунок 7 соединяется с системой трубок через отверстие 6. Магниты 43, 44 через шайбы 45, 46 прижимаются с двух сторон к направляющей 49 переносной опоры 50. Направляющая 49 опоры 50 является составной частью сваебойной машины (копра). По направляющей 49 скользит цапфа 51 молота 52 при его перемещении вверх и свободном падении вниз. Пластины 39 и 40 скреплены между собой болтами 53, 54 с зазором. При свободном падении молот 52 ударяет по вертикально установленной свае 55, а цапфой 51 - по верхней части ползунка 7. При углублении сваи 55 в грунт происходит перемещение вниз ползунка 7 по направляющей 49 переносной опоры 50. Резиновая пластина 56 в верхней части ползунка 7 смягчает механический контакт цапфы 51 с ползунком 7. Платы 35 и 36 закреплены на поверхности трубки 5. Поскольку плата 35 состоит из 25 токопроводящих пластин, шириной 20 мм каждая, то ширина всей пластины - платы 35 составляет 500 мм. По пластинам последовательно скользят электроды 31, 26, 20 и 12 по мере перемещения трубок 4,3,2,1 в объем трубки 5. Величина тока электродов 31, 26, 20 и 12 будет зависеть от числа и величины подключенных резисторов К1-К25 и оценивается индикатором перемещения 57. Происходит преобразование величины линейного перемещения электродов 31, 26, 20 и 12 в изменение тока цепи.
Точность этого преобразования - одно деление индикатора перемещения соответствует 20 мм перемещения сваи . Для удобства в приборе используется микроамперметр со шкалой от 0 до 500 μ А, градуированной в миллиметрах от 0 до 500 мм линейного перемещения электродов 31, 26, 20 и 12. Поскольку при перемещении одной трубки в объем трубки 5 (перемещение составляет 500 мм) ток изменяется по всей шкале, то введена индикация диапазонов линейного перемещения ползунка. На первом этапе происходит перемещение электродов 31 и 30 трубки 4 на 500 мм, что соответствует перемещению сваи также на 500 мм. При этом высота незабитой части сваи будет изменяться от 2,5 до 2,0 м за минусом L, где L - расстояние между верхней частью ползунка 7 и торцом сваи 56, т.е. перемещение ползунка 7 копирует перемещение сваи со сдвигом на величину L. Одновременно корпусной зажим 32 подключает лампу 56 к (-) источника, указывая, что изменение высоты сваи происходит в диапазоне (2,5-2,0)-L м. Зажим 32 контактирует с диэлектриком 37, т.е. лампа 58 отключена, а лампа 59 подключена к источнику, указывая, что изменение высоты сваи происходит в диапазоне (2,0-1,5)-L м. Электрод 26 через сопротивление R1 подключает к (-) источника индикатор 57, стрелка которого отклонится на максимальный угол, что соответствует 1975 - L мм высоте сваи над грунтом.
Аналогично происходит подключение сигнальных ламп 60 и 61, которые указывают, что изменение высоты сваи происходит соответственно в диапазоне (1,5-1,0)-L и в диапазоне (1,0-0,5)-L. Число ударов молотом учитывается счетчиком 62. В качестве счетчика используется бытовой калькулятор, путем введения при каждом ударе + 1. Блок управления 63 формирует два раздельных сигнала + и 1 при срабатывании контактного датчика 47. Одновременно сигнал 1 подается на микросхему типа К 561 ИЕ4-счетчик по модулю 10-64. При поступлении десятого импульса счетчик 64 формирует сигнал на запуск блока 65 с последующим подключением к источнику питания сигнальной лампы 66. Но это возможно, если за десять ударов молотом не пройдет импульс "сброс". Этот сигнал пройдет на микросхему только через одну или несколько полос m1-m25, разнесенных на расстояние 20 мм, при контакте с ней одного из электродов 30, 25, 19 и 11. Следовательно, сигнальная лампа 66 подключится к источнику, если один из электродов 30, 25, 19 и 11 не сместится на 20 мм за 10 ударов молотом, т. е. свая не углубится в грунт не более 20 мм. Включение сигнальной лампы 66 означает окончание забивки сваи, т.е. отказ сваи составляет менее 2 мм за 1 удар молотом. Пульт управления включает в себя источник питания, напряжением 4 и 5 В, индикатор перемещения 57, сигнальные лампы 58, 59, 60, 61 и 66, схему управления индикаторами, состоящую из двух блоков 63 и 65, связанных с платами 35 и 36 гибким кабелем через разъем.
Прибор работает следующим образом. Перед началом оценки параметров углубления сваи магнитный ползунок 7 перемещается вверх по направляющей 49 на всю длину телескопически связанных раздвижных трубок 1,2,3 и 4 и устанавливается на высоте (2,5-2,0)-L м от поверхности площадки.
Это положение показано на фиг.1. Трубки удерживаются от сдвига магнитным ползунком 7. С платой 35 и 36 контактируют электроды 30 и 31, вмонтированные в полуцилиндрическую пластину 29. При этом электрод 31 контактирует с пластиной n1 и в цепи индикатора перемещения 57 находится сопротивление R1. Электрод 30 контактирует с изоляционной частью платы 36, а зажим 32 подсоединяет к (-) источника лампу 58 диапазона (2,5-2,0)-L м. Ролики скольжения 38 скользят по поверхности трубки 5. Штифт 8 входит в прорезь 16 трубки 5. В начальный период углубления сваи, т.е. когда высота сваи над грунтом превышает 2,5-L м, включается только счетчик ударов 62 молотом 52 по свае 55. При подключении питания с каждым ударом молота срабатывает контактный датчик 47. Схема управления 63 формирует сигнал + 1, счетчик 62 изменяет каждый раз показания индикатора на + 1. Организация, производящая сваебойные работы, имеет информацию о расчетной длине сваи. В начальной стадии углубления сваи в грунт такие показатели, как величина углубления за один или несколько ударов значительны и не представляют интереса. Общее число ударов молотом представляет чисто экономический интерес (энергоемкость забивки, производительность работы машины) или выполняет контрольные функции (сравнение числа ударов разных сваебойных машин при забивке одинаковых по длине свай).
При приближении цапфы 51 к ползунку 7 подключается вся схема. Показание индикатора перемещения 57 будет наибольшим. При взаимодействии цапфы 51 и прокладки 56 ползунка 7, вся система трубок переместится вниз за счет входа трубки 4 в объем опорной трубки 5. Штифт 8 находится в прорези 16 опорной трубки 5, электроды 30 и 31 пластины 29 будут перемещаться по платам 35, 36, а зажим 32 контактирует с (-) источника на величину углубления сваи 55 в грунт за один удар молотом 52. При этом могут быть следующие варианты положения ползунка 7.
При перемещении ползунка 7 на более чем 0,5 м за один удар молотом электроды 30, 31 выйдут из контакта с пластинами 35, 36, а зажим 32 - с (-) источника и переместятся на диэлектрик 37. Если пластина 24 с электродами 25, 26 и зажим 27 займут позицию, показанную на фиг.8, стрелка индикатора перемещения 57 отклонится на максимальный угол при диапазоне (2,0-1,5)-L, что соответствует 1975-L мм высоте сваи над грунтом. Если же электрод будет контактировать с пластиной n2, то индикатор перемещения 57 покажет углубление сваи на 20 мм больше, т.е. высота ее составит 1950-L мм. Электрод 30, прежде чем выйдет на диэлектрик 37, будет иметь контакт с полосами m1-m25. Произойдет неоднократный проход сигнала на сброс на микросхему 64, возвращая ее в исходное состояние, несмотря на то, что будет введен сигнал + 1 от блока 63. Счетчик ударов изменит свою индикацию на + 1. Ничего не изменится в состоянии микросхемы 64, если электрод 25 займет любое положение на плате 35.
Перемещение ползунка 7 незначительно, в пределах 20 мм. При этом электрод 31 не выйдет из контакта с пластиной n1 и показание индикатора перемещений 57, с учетом подключенной к (-) источника лампы 58 диапазона (2,5-2,0)-L составит 2475-L мм. Поскольку электрод 30 не будет контактировать с полосой m1, то сигнал на "Сброс" не поступит от блока 63, не пройдет на микросхему 64 и последняя поменяет свое состояние с 0 на 1. Счетчик 62 сработает, показание его увеличится на + 1. Если в последующие 9 ударов молотом свая не углубится в грунт более чем на 20 мм, т.е. перемещение электродов 30 и 31 и зажима 32 будет находиться в пределах ширины полосы m1, то изменится показание счетчика 62 на + 9, а микросхема 64 будет иметь состояние + 10 и сформирует сигнал на запуск блока 65, что приведет к включению лампы 66, оценивающая окончание забивки сваи, так как за 10 ударов молотом свая не углубилась в грунт более чем на 20 мм. Счетчик 62 даст общее число ударов молотом по свае, а индикатор перемещения 57 с учетом работы лампы 58 даст высоту 2475-L мм незабитой части сваи.
При перемещении ползунка 7 на величину более 20 мм, но меньше чем 500 мм, электрод 31 будет контактировать с одной из пластин n2-n25. Индикатор перемещений 57 уменьшит свое показание за счет увеличения сопротивления от R1 до iR, где i = 2,3,4...25. Лампа 58 будет постоянно включена, указывая, что изменение высоты сваи над грунтом происходит в пределах (2,5-2,0)-L м, а электрод 30 будет последовательно контактировать с полосами m2-m25, проводя сигнал на "сброс" и возвращая микросхему 64 в состояние 0. Счетчик 62 изменит показание на + 1. Как и в первом варианте, углубление сваи в грунт значительное, и забивку необходимо продолжить до подключения лампы 66 к источнику, как в варианте 2. А это возможно, если один из электродов 30, 25, 19 или 11, последовательно контактирующий с платой 36, перемещается только до изоляционной части платы 36, т.е. величина линейного перемещения электрода не превысит 20 мм. При этом индикатор 57 не изменит своего показания при изменении показания счетчика 62 на + 10, что является дополнительным контролем правильной работы микросхемы 64, блока 65 и сигнальной лампы 66. После того, как пробка 15 трубки 4 достигнет фланца 34 трубки 5, положение трубки 4 зафиксируется в полости трубки 5, электроды 30 и 31 и зажим 32 переместятся на поверхность из диэлектрика 37, разорвав цепи их питания.
При дальнейшем перемещении ползунка 7 трубка 3 будет перемещаться в полость трубки 4. В этом случае с платой 36 и 35 будут контактировать электроды 25 и 26, а с (-) источника - зажим 27. После того, как пробка 15 трубки 3 достигнет фланца трубки 4 и зафиксируется в полости трубки 4, а электроды 25, 26 и зажим 27 переместятся на поверхность 37, начнет перемещаться трубка 2 в полость трубки 3, как результат перемещения ползунка 7.
При дальнейшем перемещении ползунка 7 трубка 2 зафиксирует свое положение в полости трубки 3, а электроды 11 и 12 и зажим 13 переместятся на поверхность цилиндра 37, начнет перемещаться трубка 1 в полость трубки 2. В отличие от трубок 2,3 и 4 фиксированное положение трубки 1 обеспечит контакт электрода 12 с пластиной n25 платы 35, электрод 11 с полосой m25 платы 35 и контакт 13 с (-) источника. Это положение соответствует минимальной высоте незабитой части сваи в грунт, равной 0,5-L м.
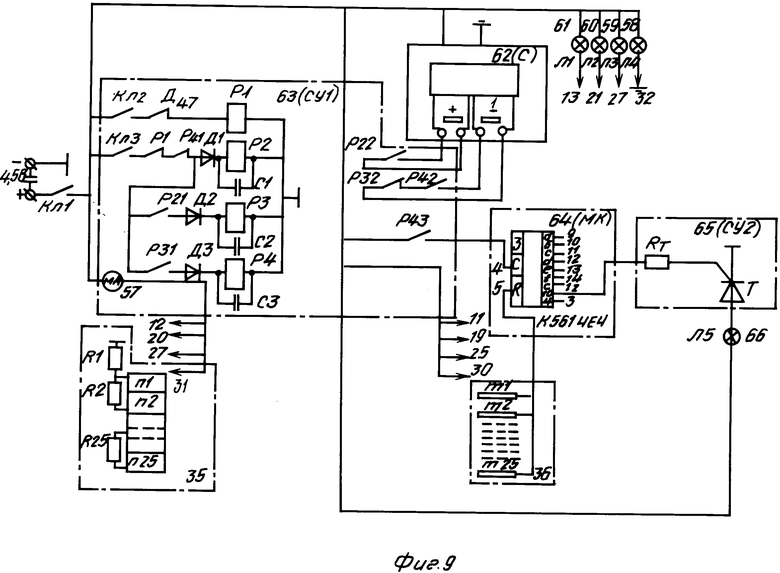
Принципиальная электрическая схема прибора включает в себя схему управления счетчиком числа ударов молотом, реализованном на бытовом калькуляторе, схему индикатора незабитой части сваи и схему контроля углубления сваи на 20 мм за 10 ударов молотом. Схема управления счетчиком числа ударов включает в себя контактный датчик 47 (Д), блок управления 63 (СУ 1) и счетчик 62 (С) - калькулятор МК-52. Схема учитывает особенность работы датчика 47 в условиях сильной вибрации опоры 50, как результат реакции связи 55 на удар молотом 52 (фиг.1), а также значительной инерционности в срабатывании бытовых калькуляторов, требующих при введении чисел значительных задержек по времени. Автоматический ввод в калькулятор значения + 1, при срабатывании датчика 47 (Д), реализуется срабатыванием контакта Р 22 реле Р 2 и контактов Р 32, Р 42 реле Р 3 и Р 4, имитирующих нажатие клавишей + и 1 калькулятора (фиг.9). Схема работает следующим образом. При замыкании последовательно ключей Кл.1, Кл.2, Кл.3 срабатывает только реле Р 1, разорвав контакты Р 1 в цепи обмотки реле Р 2 и подготовив тем самым схему к срабатыванию по сигналу датчика 47 (Д). В результате удара молотом датчик 47 (Д) разорвет цепь питания в обмотке реле Р 1, что вернет контакты Р 1 в цепи обмотки реле Р 2 в исходное состояние.
Срабатывание реле Р 2 повлечет за собой последовательное срабатывание реле Р 3 и Р 4 через замыкающие контакты Р 21 и Р 31, заряд конденсаторов С1, С2, С3, разрыв контактов Р 41 в цепи обмотки реле Р 2, исключая тем самым повторное срабатывание реле Р 2 при повторном срабатывании датчика 47 (Д) в результате вибрации опоры 50. Контакт Р 22 замыкается, имитируя нажатие клавиши (+) калькулятора, контакты Р 32 и Р 42 изменят свое состояние на противоположное, исключая одновременный ввод 1. Одновременно происходит разряд конденсатора С1 на сопротивление обмотки реле Р 2, конденсатора С2 - на сопротивление обмотки реле Р 3, конденсатора С3 - на сопротивление обмотки реле Р 4. Емкость конденсатора С1 подбирается такой, чтобы разряд ее на обмотку реле Р 2 проходил в течение 0,3 с, после чего реле Р 2 и контакты Р 21 и Р 22 вернутся в состояние, показанное на фиг.9. Время имитации нажатия клавиши + составит 0,3 с. Поскольку емкость С2 > С1, то разряд ее по времени на обмотку реле Р 3 будет превышать разряд конденсатора С1 на 0,2-0,3 с, чем реализуется интервал между вводом + и вводом 1. После того, как произойдет разряд конденсатора С2, реле Р 3 и контакты Р 31 и Р 32 вернутся в состояние, показанное на фиг.9, начнется имитация нажатия клавиши 1.
Поскольку емкость С3 > С2, то разряд ее на обмотку реле Р 4 будет превышать разряд конденсатора С2. Емкости конденсаторов подбираются так, чтобы их разряд составил С1 - 0,3 с, С2 - 0,5 с, С3 - 0,8-1,0 с. В этом случае время имитации нажатия клавиши 1 составит порядка 0,3 с. После разряда емкости С3 схема вернется в исходное состояние, показанное на фиг.7, счетчик 62 (С) изменит показание на + 1. Кроме того, поскольку контакты Р 41 остаются открытыми на все время разряда конденсатора С3 на обмотку реле Р 4, т. е. около 1 с, то на этот период исключается воздействие на схему повторные срабатывания датчика 47 (Д) при вибрации опоры 50. Схема оценки не погруженной в грунт части сваи включает в себя индикатор перемещения - микроамперметр 57 со шкалой от 0 до 500 μ А, градуированной в миллиметрах с точностью до 20 мм, резисторную дорожку R1-R25 с токопроводящими пластинами n1-n25, по которым перемещаются последовательно электроды 31, 26, 20 и 12 (фиг. 8). На фиг. 9 показаны только R1, R2, ...R25 и n1, n2, ...n25. Для того, чтобы использовать всю шкалу микроамперметра 57 при перемещении только одной из трубок 1,2,3 и 4 (фиг.1), что соответствует углублению сваи на 500 мм, необходимо принять R1 = 9 кОм, I = 4,5 В/9000 Ом = 500 μ А, что соответствует высоте незабитой части сваи в 500 мм.
Приняв R2 = R3 = ... R25 = 1500 Ом, можно перевести показания микроамперметра 57 в отсчет углубления сваи в мм. При перемещении сваи на 20 мм, т. е. высота незабитой части сваи составит 480 мм, в цепь индикатора подключится R1 + R2 = 10,5 кОм, ток I = 375 μА, при высоте незабитой части сваи в 440 мм, R1 + R3 = 13,5 кОм, I =335 μ А и т.д. Конечная высота сваи в 200 мм даст сопротивление R1 + 24R = 45 кОм, I = 100 μ А. Возможны и другие варианты градуировки. Поскольку преобразование перемещения сваи в показания тока реализуется на одной резисторной дорожке длиной 500 мм, то отсчет углубления сваи по индикатору 57 увязывается с индикацией диапазона незабитой части сваи, как пояснялось выше. Если высота незабитой части сваи изменяется от 2,5 до 2 м, то горит лампа Л4 (58) индикации этого диапазона и при отсчете 500 индикатора 57 реальная высота сваи составляет 2500-L мм, при отсчете 480 мм реальная высота соответствует 2480-L мм и т.д., при конечном значении 20 высота незабитой части составит 2020-L мм. Если высота незабитой части сваи изменяется от 2 до 1,5 м, то подключается лампа Л3 (59) и при отсчетах 500 или 480 индикатора 57 высота сваи над грунтом составит 2000-L мм и 1980-L мм, а при конечном значении 20 высота составит 1480-L мм. Аналогично, если горит лампа Л2 (60), то при отсчете 500 или 480 индикатора 57 высота сваи над грунтом составит 1500-L или 1480-L мм, а при конечном значении 20 - 1020-L мм.
Если горит лампа Л1 (61), то при отсчете 500 или 480 индикатора 57 высота сваи над поверхностью составит 1000-L мм или 980-L мм, а при конечном значении 20 высота сваи составит 520-L мм. Лампы 61, 60, 59 и 58 подключаются к источнику питания при последовательном контакте зажимов 32, 27, 21, 13 с корпусом, на который выведен "-" источника питания. Схема контроля углубления сваи на 20 мм за 10 ударов молотом включает в себя микросхему К 561тИЕ 4 (счетчик по модулю 10), тиристор КУ 102 А и лампу Л5 (66) подсветки "Отказ". При срабатывании реле Р 4 замыкается контакт Р 43, подавая импульс напряжения 4,5 В на счетный вход С (4) микросхемы. Посредством дешифратора информации о состоянии счетчика выводится на а (9), b (10), с (11), d (12), е (13), f (8), g (1) в виде кода, удобного для управления. На 10 (2) микросхемы выводится дешифрованная информация 10 состояния счетчика. Одновременно вход сброса R (5) будет подключен к + 4,5 В, если один из электродов 30, 25, 19 или 11 будет иметь контакт с одной из полос m1-m25 нормированной сетки 36. А поскольку полосы разнесены на расстояние 20 мм, то информация на выходе 10 (2) микросхемы будет иметь место только в случае, если за 10 ударов молотом, т.е. при подаче 10 импульсов на счетный вход С (4) не пройдет импульс на вход сброса R (5), что будет возможно, если перемещение одного из электродов 30, 25, 19 или 11 будет меньше 20 мм.
Появление сигнала на 10 (2) микросхемы через резистор Ктоткроет тиристор Т, подключая к источнику напряжения 4,5 В лампу 66 (Л5) подсветки табло "Отказ". Согласно действующего СНиП 3.02.01-87, если величина отказа забитой сваи не превышает 2 мм за 1 удар молотом или 20 мм за 10 ударов, то это соответствует предъявленным требованиям окончания забивки сваи. Следовательно, прибор оценки углубления сваи в грунт определяет общее число ударов молотом по свае, высоту незабитой части сваи не последних 2500-L мм с точностью 20 мм, состояние отказа, не превышающего 20 мм за 10 ударов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ ПРОЧНОСТИ СЦЕПЛЕНИЯ КАМЕННОГО МАТЕРИАЛА С ВЯЖУЩИМ | 1992 |
|
RU2020482C1 |
| УСТРОЙСТВО ДЛЯ ВОЗВЕДЕНИЯ СВАЙ В ГРУНТЕ | 1993 |
|
RU2049855C1 |
| Устройство для контроля заданного уровня погружения сваи | 1981 |
|
SU1059065A2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЛИНЫ ЗАГЛУБЛЕННОЙ В СРЕДУ ЭЛЕКТРОПРОВОДЯЩЕЙ СВАИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2190865C2 |
| АППАРАТ ДЛЯ ИОНИЗАЦИИ ВОЗДУХА | 1991 |
|
RU2005550C1 |
| Способ испытания свай динамической нагрузкой | 1972 |
|
SU575536A1 |
| СПОСОБ ОЧИСТКИ СТОЧНЫХ ВОД ОТ НЕФТЕПРОДУКТОВ | 1992 |
|
RU2010008C1 |
| СПОСОБ ПОГРУЖЕНИЯ СВАЙ В ГРУНТ МЕХАНИЧЕСКИМ МНОГОИМПУЛЬСНЫМ МОЛОТОМ | 2004 |
|
RU2272103C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПОДЗЕМНЫХ КОНСТРУКЦИЙ ИЗ ЗАКРЕПЛЕННОГО ГРУНТА | 1992 |
|
RU2008396C1 |
| ФУНДАМЕНТ ДЛЯ СЛАБЫХ И ВОДОНАСЫЩЕННЫХ ОСНОВАНИЙ | 2000 |
|
RU2188906C2 |

Использование: для контроля параметров углубления сваи в грунт. Прибор контроля параметров движения содержит орган слежения за перемещением сваи, измеритель перемещения, выполненный в виде резисторной дорожки, и пульт управления. Орган слежения выполнен в виде перемещающегося по направляющей магнитного ползунка, контролирующего углубления сваи. система раздвижных и опорной трубок преобразует перемещения ползунка в перемещение токосъемных электродов, взаимодействующих с резисторной дорожкой и нормированной сеткой токопроводящих полос. Пульт управления связан с измерителем перемещений гибким кабелем. 9 ил.
ПРИБОР КОНТРОЛЯ ПАРАМЕТРОВ ДВИЖЕНИЯ, содержащий орган слежения, выполненный в виде установленного с возможностью перемещения по направляющим ползунка, предназначенного для взаимодействия с подвижным объектом, измеритель перемещения, выполненный в виде резисторной дорожки, и присоединенные к нему источник питания и пульт управления, отличающийся тем, что он снабжен телескопически связанными раздвижными и опорной трубками, закрепленными на раздвижных трубках полуцилиндрическими пластинами с токосъемными электродами и роликами скольжения, нормированной сеткой токопроводящих полос, закрепленной вместе с резисторной дорожкой на поверхности опорной трубки, и датчиком ударов, закрепленным на ползунке, который выполнен в виде пары установленных с зазором пластин и закрепленных на них двух магнитов, а пульт управления выполнен в виде двух блоков управления, входы которых соединены гибким кабелем с резисторной дорожкой, нормированной сеткой токопроводящих полос и датчиком ударов, индикатора перемещения за один или несколько ударов и счетчика общего количества ударов, которые присоединены к выходам соответствующего блока управления.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент ФРГ N 3710286, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
