Изобретение относится к электротехнике, в частности к электроприводу и устройству электрических машин.
Известны преимущества, создаваемые в электроприводе использованием электрических машин непосредственного привода - с низкой частотой вращения ротора [1]. Однако машины двойного движения недостаточно технологичны, особенно для особо низких частот вращения.
Существенно ограничены в этой области и машины с разделенными фазами [2] из-за минимально допустимого соотношения между расстоянием по дуге расточки статора соседних полюсов 2 τ к зазору δ [2 τ≥ (16÷20) δ] и допустимом по технологическим соображениям отношением диаметра D к зазору δ D/δ ≅ 1000.
Действительно, πD = 2Рτ = Р 20 δ ; D =  ≅ 1000;; число пар полюсов Р ≅ 50 π, или округлено Р ≅ 160. Так как частота вращения nоб/мин =
≅ 1000;; число пар полюсов Р ≅ 50 π, или округлено Р ≅ 160. Так как частота вращения nоб/мин =  , то исходя из основных физических и технологических соображений nоб/мин ≥
, то исходя из основных физических и технологических соображений nоб/мин ≥  =
=  при частоте тока f = 50 Гц n ≥ 18 об/мин. Лишь при повышении точности изготовления, когда можно принять D/δ ≃ 1800, удается выполнить n = 10 об/мин. Для решения конкретного безредукторного электропривода с частотой вращения в 1 об/мин для машины непрерывной разливки стали (по техническим требованиям ВНИИМЕТМАШа) потребовалось применить специальный источник питания с частотой тока f = 5 Гц.
при частоте тока f = 50 Гц n ≥ 18 об/мин. Лишь при повышении точности изготовления, когда можно принять D/δ ≃ 1800, удается выполнить n = 10 об/мин. Для решения конкретного безредукторного электропривода с частотой вращения в 1 об/мин для машины непрерывной разливки стали (по техническим требованиям ВНИИМЕТМАШа) потребовалось применить специальный источник питания с частотой тока f = 5 Гц.
Цель изобретения - устранение указанных недостатков, существенного, во много раз при той же частоте питания, снижения нижнего предела частоты вращения машины. Для этой цели предлагается сверхнизкоростная электрическая машина, содержащая обмотку с разделенными фазами, расположенными последовательно вдоль оси машины коаксиально ротору и состоящими из нескольких секций, магнитопроводы с явно выраженными полюсами, охватывающими обмотки. С целью повышения надежности и улучшения технологичности секции каждой фазы смещены друг относительно друга вдоль оси машины на расстояние, соответствующее длинам магнитопроводов предыдущих фаз. Расстояние между соседними одноименными полюсами по дуге окружности активной поверхности статора или ротора выбрано равным αp=Z , где D - диаметр расточки статора или ротора; Р - число пар полюсов; Z - число секций в каждой фазе.
, где D - диаметр расточки статора или ротора; Р - число пар полюсов; Z - число секций в каждой фазе.
Выполнение предлагаемой машины возможно практически в любой, известной для обычных явнополюсных машин, модификации: реактивной - когда в качестве ротора (вторичной части) применяются замыкающие ферромагнитные пластины - полюсы; синхронной - когда вместе с ротором вращается ось магнитного поля постоянного направления; автосинхронный - с характеристиками машины постоянного тока, когда имеются датчики положения, переключающие токи в обмотках статора в зависимости от положения оси потока ротора относительно фаз статора; шагового двигателя с весьма малой величиной единичного перемещения, - когда последовательность подачи тока в обмотки статора задается от специального источника вместо многофазной сети; асинхронной, в том числе с фазным ротором, когда многофазные статор и ротор выполняются идентичными и обмотки ротора подключаются (обычно через кольца) - к системе реостатов с последующим замыканием их накоротко - либо, в случае работы в режиме двойного питания обмотки статора и ротора питаются от источников с разной частотой тока; работа в режиме сверхполюсного сельсина - дифференциального - при выполнении по типу асинхронной с фазным ротором - или обычного - при создании на роторе переменного однофазного потока.
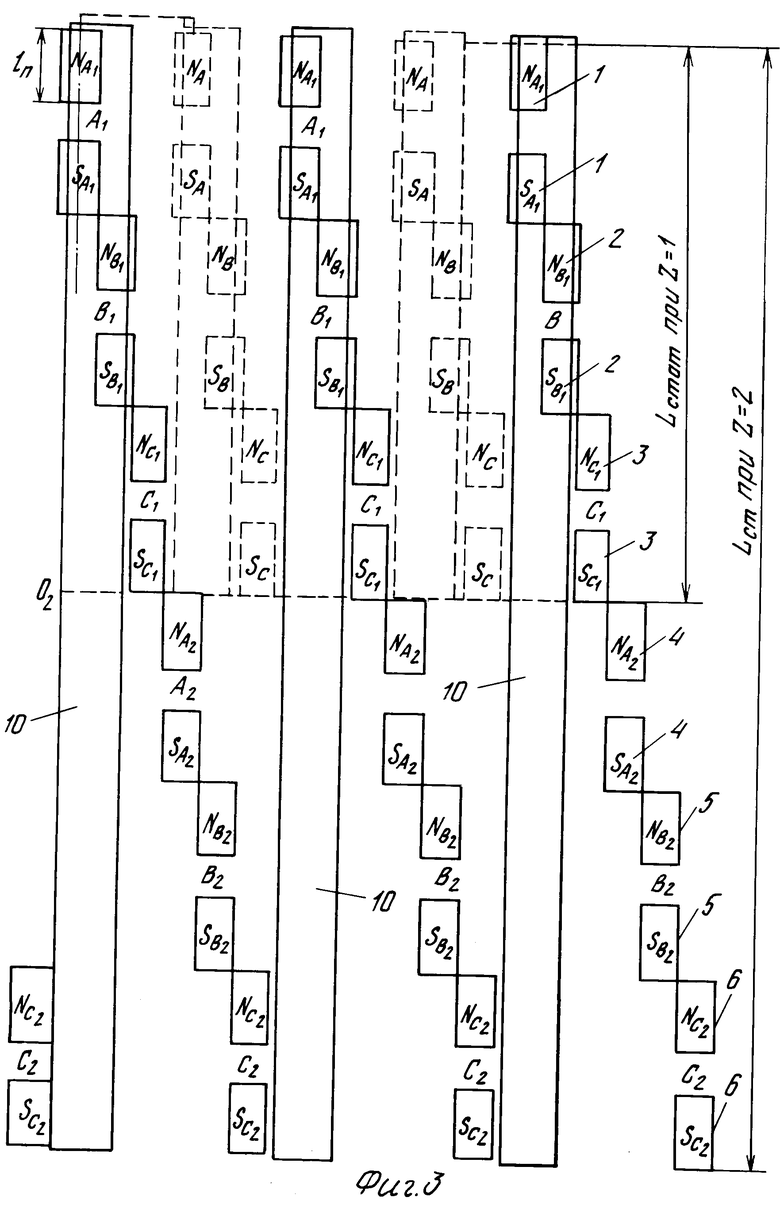
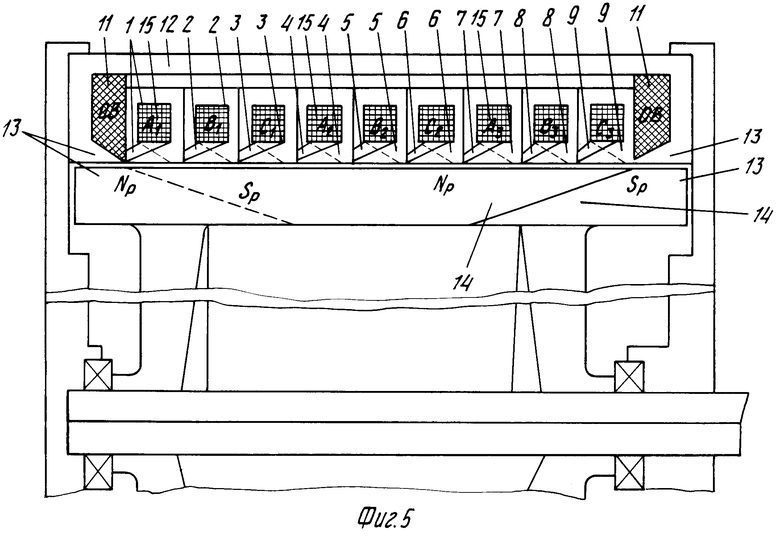
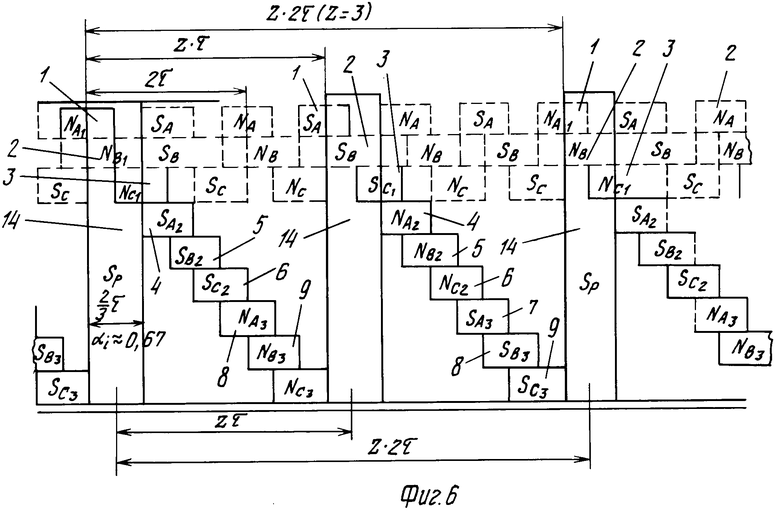
На фиг. 1 приводится простейший вариант выполнения машины - без консольного ротора реактивной машины с раздельными фазами, по прототипу; на фиг. 2 - аналогичное решение, по изобретению (при Z = 2); на фиг. 3 - в верхней части - развертка системы полюсов фаз модификации прототипа (при учете пунктирно обозначенных полюсов), сплошными линиями обозначены полюсы фаз и пластины (полюсы) ротора по изобретению (при Z = 2); на фиг. 4 - синхронная или асинхронная с фазным ротором машина с разделенными фазами; на фиг. 5 - синхронная машина (при Z = 3 с бесконтактным ротором); на фиг. 6 - развертка системы полюсов фаз.
На чертежах показаны: полюсы 1-й секции: 1 - фазы А, 2 - фазы В, 3 - фазы С; полюсы 2-й секции: 4 - фазы А, 5 - фазы В, 6 - фазы С; полюсы 3-й секции: 7 - фазы А, 8 - фазы В, 9 - фазы С. Машина содержит замыкающие пластины (полюсы) 10 ротора реактивной машины, обмотки 11 возбуждения бесконтактного варианта синхронной машины, статорную часть 12 магнитопровода возбуждения, потокопередающие кольца 13 системы возбуждения, полюсы 14 системы возбуждения, последовательно соединенные обмотки 15 секции фазы А.
Машина работает следующим образом.
При вращении ротора пластины полюсы ротора 10 последовательно занимают место против осей секций А1, В1, С1 (1, 2, 3), затем А2, В2, С2(4, 5, 6) и снова А1, В1, С1 и т. д. Принципиально по характеру создания моментов на оси машины работа машины по фиг. 2 ничем не отличается от работы машины по фиг. 1. Для сохранения характера нагрузки в фазах обмотки секций каждой фазы включены последовательно при любом Z. Возможно также при этом питать все, например нечетные, секции каждой фазы от одних, например положительных, полуволн системы многофазного питания, а четные, соответственно, от отрицательных полуволн той же системы. В синхронном варианте (на фиг. 5 и 6 Z = 3) полюса ротора 14, следуя за вращающимся полом, занимают, например, по состоянию на фиг. 6, положение против оси вращающегося поля - против осей полюсов 2 первой секции фазы В1; вслед за осью вращающегося поля полюса 14 будут перемещаться к осям 3 первой секции фазы С1, затем 4 - второй секции А2, второй секции фазы В2 и т. д., постоянно сцепляясь с вращающимся полем многофазной системы аналогично работе машины по фиг. 4. Потеря в использовании габарита и меди (больше катушек в каждой фазе) только кажущаяся - для той же заданной частоты вращения и частоте питания из-за резкого (в Z раз) увеличения допустимого зазора - можно в Z раз увеличить диаметр машины при той же технологичности (отношения D/ δ) - а использование габарита возрастает с увеличением диаметра в D2 раз, а длины l - лишь в первой степени: =
=  .
.
Улучшается и использование массы: при тех же αlABδ сохраняется высота кольца статора, т. е. масса растет пропорционально D, а мощность - пропорционально D2). Затем резко уменьшается количество меди и потери в системе возбуждения; без данного предполагаемого изобретения вообще невозможно построить сверхнизкоскоростную машину с nоб/мин≅  ; значительные мощности все равно требуют многосекционности фаз. При высокой многополюсности в шаговом или сельсинном варианте можно получить разрешающую способность в угловые секунды, совершенно недостигаемые другими безредукторными электромашинными решениями. Кроме того, при одной и той же длине в расчетной полюсной дуге площадь каждого полюса больше.
; значительные мощности все равно требуют многосекционности фаз. При высокой многополюсности в шаговом или сельсинном варианте можно получить разрешающую способность в угловые секунды, совершенно недостигаемые другими безредукторными электромашинными решениями. Кроме того, при одной и той же длине в расчетной полюсной дуге площадь каждого полюса больше.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1990 |
|
RU2037940C1 |
| МНОГОФАЗНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1992 |
|
RU2065243C1 |
| МАШИННО-ТРАНСФОРМАТОРНЫЙ АГРЕГАТ | 1995 |
|
RU2096893C1 |
| Электрическая машина | 1979 |
|
SU845238A1 |
| Электрическая машина с разделенными магнитопроводами фаз | 1988 |
|
SU1580492A1 |
| СИНХРОННЫЙ ГЕНЕРАТОР С РАЗДЕЛЬНЫМИ ФАЗАМИ | 1994 |
|
RU2065658C1 |
| Электрическая машина | 1978 |
|
SU792512A1 |
| Линейная электрическая машина | 1989 |
|
SU1713041A1 |
| ОДНОФАЗНЫЙ БЕСКОЛЛЕКТОРНЫЙ ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1994 |
|
RU2091968C1 |
| Электрическая машина | 1978 |
|
SU748707A1 |



Сущность изобретения: сверхнизкоскоростная электрическая машина с раздельными фазами, состоящими каждая из нескольких секций, снабженных едиными для данной секции обмотками, ось которых коаксиальна оси вращения ротора машины, охватывающими обмотки магнитопроводами с явно выраженными полюсами. У каждой из секций расстояние между соседними одноименными полюсами по дуге окружности внутренней поверхности статора или наружной поверхности ротора равно величине  , где D - диаметр окружности, P - число пар полюсов. τ - расчетное расстояние по дуге между соседними разноименными полюсами статора или ротора, Z > 1, а число секций в каждой фазе равно или кратно Z. 2 з.п.ф-лы, 6 ил.
, где D - диаметр окружности, P - число пар полюсов. τ - расчетное расстояние по дуге между соседними разноименными полюсами статора или ротора, Z > 1, а число секций в каждой фазе равно или кратно Z. 2 з.п.ф-лы, 6 ил.
ap=Z ,
,
где D - диаметр ласточки статора или ротора;
p - число пар полюсов;
z - число секций в каждой фазе.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электрическая машина с разделенными магнитопроводами фаз | 1988 |
|
SU1580492A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
