Изобретение относится к авиации и касается, в частности, транспортных самолетов вертикального взлета и посадки (СВВП), служащих для перевозки пассажиров и грузов.
Известно несколько компоновочных схем СВВП [1]. Одна из них - это однофюзеляжный высокоплан "нормальной" схемы. Двигатели с двумя легконагруженными винтами установлены на концах крыла, по одну на каждом конце, в поворотных мотогондолах. Кили установлены на концах горизонтального оперения. Основные и передняя стойки шасси крепятся к фюзеляжу.
Недостатком такого решения является потеря тяги винтов при вертикальном взлете и посадке, вызванная обдувом неподвижного крыла винтами, что ведет к необходимости увеличения потребной стартовой тяговооруженности, а значит, к увеличению относительных весов силовой установки и топлива. Обдув крыла, горизонтального оперения и килей винтами при горизонтальном полете приводит к увеличению их аэродинамического сопротивления, а значит, к уменьшению аэродинамического качества СВВП в целом. Крепление основных стоек шасси к фюзеляжу увеличивает их относительный вес (из-за необходимости иметь определенное значение колеи шасси). Размещение двигателей с винтами на концах крыла и необходимость иметь в целях безопасности полета на режиме висения и переходном режиме соединительную трансмиссию между ними приводит к увеличению относительных весов крыла и силовой установки.
Другая схема - однофюзеляжный высокоплан "нормальной" схемы с Т-образным оперением. Двигатели с двумя тяжелонагруженными винтами установлены на поворотном крыле, по одному с каждой стороны фюзеляжа (в середине размаха консоли). В горизонтальном оперении установлен вентилятор, служащий для управления СВВП по тангажу на режиме висения и переходном режиме. Основные и передняя стойки шасси крепятся к фюзеляжу.
Недостатком данной схемы является срыв потока с крыла на переходном режиме (из-за большого значения угла атаки крыла), что заставляет иметь мощную механизацию крыла и более высокую тяговооруженность. Все это приводит к увеличению относительных весов крыла и силовой установки. Крепление основных стоек шасси к фюзеляжу увеличивает относительный вес шасси (из-за необходимости иметь определенное значение колеи шасси). Требование обеспечения безопасности полета на режиме висения и переходном режиме вынуждает иметь соединительную трансмиссию между двигателями, установленными на разных консолях крыла, что увеличивает относительные веса крыла и силовой установки. Наличие вентилятора в горизонтальном оперении приводит к дополнительным затратам мощности, что увеличивает относительные веса силовой установки и горизонтального оперения, снижает безопасность полета на режиме висения и переходном режиме. Обдув крыла и горизонтального оперения винтами в горизонтальном полете приводит к уменьшению аэродинамического качества СВВП.
Из результатов исследования самолетов двухфюзеляжных схем [2] следует, что такие самолеты на крейсерском режиме имеют изгибающие моменты в корне крыла на 51% меньше, чем эквивалентные по массе однофюзеляжные самолеты. При этом уменьшаются взлетная масса самолета на 6,4%, потребный запас топлива на 13,5%, потребная тяга двигателей на 11,7%, стоимость самолета на 10% , прямые эксплуатационные расходы на 11%.
Наиболее близким к заявляемому решению является самолет [3]. Он имеет два фюзеляжа (Ф), три тандемно расположенные несущие поверхности (НП), двигатели (Д) с общим тянущим винтом, кили (К). Д с тянущим винтом прикреплены к средней НП между Ф в плоскости симметрии самолета. Для сокращения взлетной дистанции Д с тянущим винтом выполнены поворачивающимися в плоскости симметрии самолета. У данной компоновки вектор тяги всегда лежит в плоскости симметрии самолета (в независимости от отказа одного из двигателей), что повышает безопасность полета. Этот самолет имеет высокое аэродинамическое качество, так как при горизонтальном полете в спутном потоке от винта находятся не все НП. Принятое расположение Д и винта позволяет иметь общий редуктор, минимальный вес соединительной трансмиссии, а значит, минимальный относительный вес силовой установки в целом.
Недостатками такого решения являются нерешенность задачи обеспечения управляемости самолета на нулевых скоростях полета (на режиме висения), потеря тяги винта от обдува сверху неподвижной НП, к которой он прикреплен (когда поворот винта применяется для сокращения взлетной дистанции).
Целью изобретения является устранение вышеназванных недостатков прототипа.
Очевидно, что если такая задача может быть осуществлена, то это "неочевидное" решение для сведущего в авиации специалиста, поскольку в рассмотренном прототипе она не решена.
Заявляемое решение имеет общие элементы с прототипом, такие как НП 1,2,3,4 и 5 (фиг.1 и 2), Ф 6 и 7 (фиг.1 и 2), К6 и 7 (фиг.2), Д10 (фиг.2), прикрепленные к НП 3 между Ф 6 и 7.
Отличительные признаки следующие. Двигатели 10 имеют общие тандемно расположенные воздушные подъемно-маршевые винты (ВПМВ) противоположного вращения 11 и 12 (фиг.1 и 3), прикрепленные к НП 3, и их суммарный вектор тяги лежит в плоскости симметрии СВВП; НП 3 (вместе с прикрепленными к ней двигателями 10 и ВПМВ 11 и 12) при вертикальном взлете и посадке устанавливается в вертикальное положение; управление СВВП на режиме висения осуществляется по крену и тангажу - наклоном векторов тяги ВПМВ 11 и 12 в разные стороны в плоскостях YOZ (фиг.2) и XOY (фиг.3) соответственно, по рысканию - дифференциальным изменением общего шага ВПМВ 11 и 12.
Принятое расположение двигателей 10 и ВПМВ 11 и 12 обеспечивает управляемость и высокую безопасность полета СВВП на режиме висения и переходном режиме. В силу того, что суммарный вектор тяги обеих ВПМВ 11 и 12 (на любом режиме полета) имеет свое начало на оси OZ, то для поворота НП 3 относительно этой оси необходимо иметь силовые приводы минимальной мощности, что уменьшает потребную величину стартовой тяговооруженности и, значит, уменьшает относительный вес силовой установки. Поворот при вертикальном взлете и посадке вместе с ВПМВ 11 и 12 и НП 3 уменьшает потери их тяги на этом режиме, что также ведет к снижению относительного веса силовой установки.
Таким образом в заявляемом СВВП решены задачи обеспечения управляемости и устранены потери тяги ВПМВ 11 и 12 на нулевых скоростях полета (на режиме висения), сохраняя при этом все преимущества, присущие прототипу.
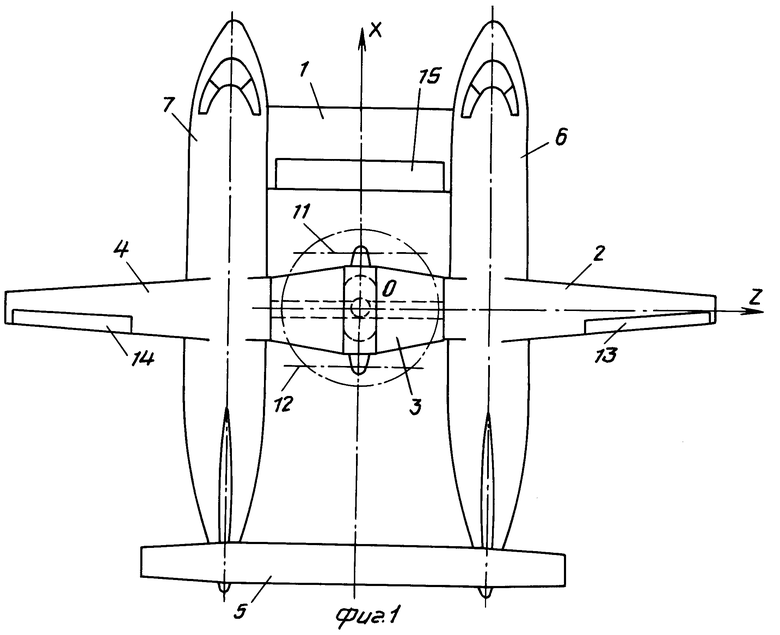
На фиг.1 изображен СВВП, вид сверху. Цифрами обозначены: 1-5 - несущие поверхности; 6 и 7 - фюзеляжи, 11 и 12 - ВПМВ, 13 и 14 - элероны (Э), 15 - руль высоты (РВ). Нанесены оси OX и OZ системы координат.
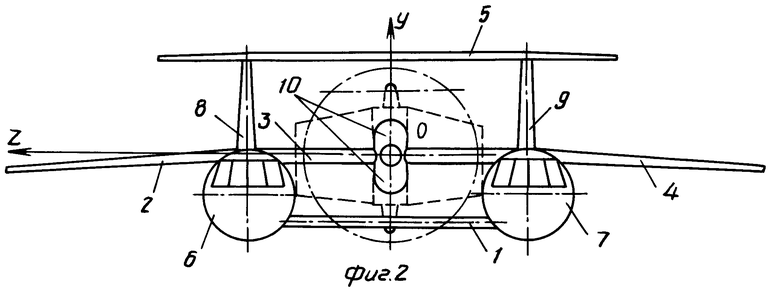
На фиг.2 изображен СВВП, вид спереди, где цифрами обозначены: 1-5 - НП; 6 и 7 - Ф, 8 и 9 - К, 10 - Д. Нанесены оси OY и OZ системы координат.
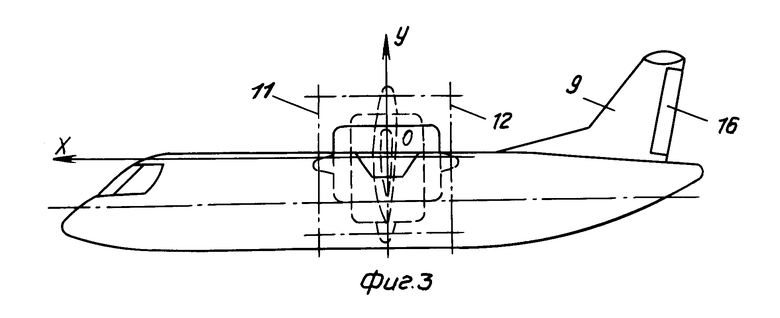
На фиг.3 изображен СВВП, вид сбоку. Цифрами обозначены: 9 - К, 11 и 12 ВПМВ, 16 - руль направления (РН). Нанесены оси OX и OY системы координат.
Предлагаемый СВВП имеет НП 1-5 (фиг.1 и 2), Ф 6 и 7, К 8 и 9 (фиг.2 и 3), Д 10 (фиг.2), ВПМВ 11 и 12 (фиг.1 и 3) противоположного вращения, Э 13 и 14 (фиг.1), РВ 15, РН 16 (фиг.3).
При вертикальном взлете и посадке НП 3 (вместе с прикрепленными к ней Д 10 и ВПМВ 11 и 12) устанавливается в вертикальное положение так, как показано пунктирными линиями на фиг.1-3.
Вертикальные взлет и посадка осуществляются одновременным изменением (в одном направлении) общего шага ВПМВ 11 и 12, управление по рысканию на режиме висения осуществляется дифференциальным изменением общего шага ВПМВ 11 и 12.
Управление по тангажу на режиме висения осуществляется наклоном векторов тяги ВПМВ 11 и 12 в разные стороны в плоскости XOY (фиг.3), управление по крену на этом режиме - наклоном векторов тяги ВПМВ 11 и 12 в разные стороны в плоскости YOZ (фиг.2). Наклон векторов тяги ВПМВ 11 и 12 осуществляется наклоном в нужную сторону плоскостей вращения этих винтов.
В горизонтальном полете все НП создают положительную подъемную силу. Управление СВВП в горизонтальном полете осуществляется по тангажу - РВ 15 и переставной НП 5 (фиш.1), по крену - Э 13 и 14 (фиг.1), по рысканию РН 16 (фиг.3).
Переход из режима висения в горизонтальный полет (и наоборот) производится путем изменения угла установки НП 3 в плоскости XOY (фиг.3). Управление СВВП на переходном режиме осуществляется как с помощью аэродинамических органов управления - переставной НП 5, Э 13 и 14, РВ 15 (фиг.1) и РН 16 (фиг.3), так и с помощью изменения направления векторов тяги ВПМВ 11 и 12 в соответствующих плоскостях.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОЛЕТ ВЕРТИКАЛЬНОГО ИЛИ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 1994 |
|
RU2086477C1 |
| САМОЛЕТ КОРОТКОГО И/ИЛИ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2013 |
|
RU2531792C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2012 |
|
RU2495796C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2014 |
|
RU2562259C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2014 |
|
RU2577824C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ (ВАРИАНТЫ) | 2012 |
|
RU2486105C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2015 |
|
RU2607037C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2017 |
|
RU2672308C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2639352C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2012 |
|
RU2509033C1 |
Изобретение относится к авиационной технике, в частности к самолетам вертикального взлета и посадки. Сущность изобретения: самолет вертикального взлета и посадки содержит два фюзеляжа, три тандемно расположенные несущие поверхности, два киля. На средней несущей поверхности закреплена подъемно-маршевая силовая установка, вектор тяги которой лежит в плоскости симметрии самолета. На режиме взлета и посадки силовая установка, включающая два тандемно расположенных винта противоположного вращения, поворачивается в вертикальное положение. Управление на режиме висения осуществляется по тангажу и крену наклоном векторов тяги винтов в разные стороны, а по рысканью - дифференциальным изменением общего шага винтов. 3 ил.
САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ, содержащий два фюзеляжа, соединенные между собой тремя тандемно расположенными по их длине несущими поверхностями, два киля, каждый из которых закреплен на хвостовой части фюзеляжа, и закрепленную на средней несущей поверхности винтовую подъемно-маршевую силовую установку с возможностью ее поворота на режиме вертикального взлета и посадки в вертикальное положение, причем вектор тяги винтовой подъемно-маршевой силовой установки лежит в плоскости симметрии самолета, отличающийся тем, что винтовая подъемно-маршевая силовая установка включает два тандемно расположенных винта противоположного вращения и по крайней мере два двигателя, а ее поворот в вертикальное положение осуществляется средней несущей поверхностью, выполненной поворотной, при этом управление самолетом на режиме висения осуществляется по тангажу и крену наклоном векторов тяги винтов в разные стороны в продольной и поперечной плоскостях самолета соответственно, а по рысканью - дифференциальным изменением общего шага винтов.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Моделист-конструктор, N 9, 1989, с.21. | |||
