Изобретение относится к буровой технике, в частности касается управления режимом работы забойных гидравлических двигателей при бурении скважин.
Известен способ управления режимом бурения путем регулирования осевой нагрузки на долото посредством ленточного тормоза лебедки на основе показаний наземного индикатора веса, с помощью которого осуществляется измерение веса на крюке [1].
При всей своей простоте указанный споcоб хотя и позволяет судить о работе турбобура на забое скважины, но в то же время не обеспечивает его отработку в области максимума механической мощности. Объясняется это по крайней мере двумя основными причинами. Во-первых, информация, получаемая с помощью индикатора веса, особенно при наклонно направленном бурении, неточна, так как при этом не учитывается сила трения бурильной колонны о стенки скважины. Во-вторых, при бурении гидравлическими двигателями осевая нагрузка без точной информации о физико-механических свойствах проходимых горных пород не характеризует ни частоту вращения, ни развиваемый момент, т.е. мощность на валу двигателя, которая при прочих равных условиях определяет механическую скорость бурения.
Известен также способ управления режимом работы турбобура путем автоматического поддержания постоянной величины осевой нагрузки на долото с помощью электропорошкового тормоза типа ТЭП-45, связанного механически с валом лебедки [2].
Как и в предыдущем способе, при данном методе не учитываются физико-механические свойства проходимых горных пород, в результате чего не обеспечивается отработка турбобура в области максимума механической мощности.
Наиболее близким по технической сущности к предлагаемому является способ и устройство для автоматического управления режимом работы турбобура [3] .
Такой способ включает вращение забойного двигателя и долота за счет циркуляции бурового раствора, создание в буровом растворе колонны бурильных труб импульсов давления с периодом следования, пропорциональным частоте вращения вала забойного двигателя, передачу их по буровому раствору на поверхность и формирование на основе поступающих импульсов давления сигналов управления тормозом барабана лебедки для поддержания постоянной частоты вращения вала. Реализация указанного способа осуществляется посредством устройства автоматического управления, содержащего глубинный импульсный датчик давления, подключенный ко входу аппаратурного блока наземного комплекса, выполненного в виде последовательно соединенных электромеханического приемника импульсов давления, фильтра-усилителя и компаратора и последовательно соединенных микропроцессорного блока управления и формирователя управляющего сигнала, выход которого подключен ко входу регулятора нагрузки на долото.
Недостатком этого технического решения является отсутствие возможности автоматической идентификации рабочей частоты вращения, соответствующей максимуму механической мощности на долоте, что крайне необходимо, так как даже забойные движители одного и того же типа имеют существенный разброс характеристик.
Целью изобретения является повышение эффективности бурения скважин за счет определения режима максимальной мощности конкретного типа забойного гидравлического двигателя.
Цель достигается тем, что в способе управления режимом работы забойного гидравлического двигателя при бурении скважин, включающем создание в буровом растворе колонны бурильных труб импульсов давления с периодом, пропорциональным частоте вращения вала забойного двигателя, передачу их по буровому раствору на поверхность и формирование на основе поступающих импульсов давления сигналов управления тормозом барабана лебедки для поддержания постоянной частоты вращения вала, колонну бурильных труб приподнимают над забоем скважины, осуществляют измерение частоты вращения вала забойного двигателя в режиме холостого хода и автоматически производят идентификацию рабочей частоты вращения, соответствующей режиму максимальной механической мощности, передаваемой долоту, запоминают выбранное значение этой частоты в качестве уставки, затем опускают колонну бурильных труб на забой. В процессе бурения текущие значения частоты вращения сравнивают со значением уставки, и сигнал управления тормозом формируют в зависимости от полученного в результате сравнения сигнала рассогласования. Кроме того, момент проведения очередной идентификации осуществляют по величине расхода прокачиваемого бурового раствора на входе в бурильную колонну или по величине давления бурового раствора в нагнетательной линии скважины.
Для реализации данного способа уcтройcтво для управления режимом работы гидравлического забойного двигателя, содержащее глубинный импульсный датчик измерения и передачи на поверхность по буровому раствору импульсов давления, подключенный ко входу аппаратурного блока, выполненного в виде последовательно соединенных электромеханических приемника-преобразователя импульсов давления, фильтра-усилителя и компаратора, и последовательно соединенных микропроцессорного блока управления и формирователя управляющего сигнала, выход которого подключен ко входу регулятора нагрузки на долото, снабжено блоком идентификации рабочей частоты вращения, ко входу которого подключен выход компаратора, а выход блока идентификации соединен со входом микропроцессорного блока управления.
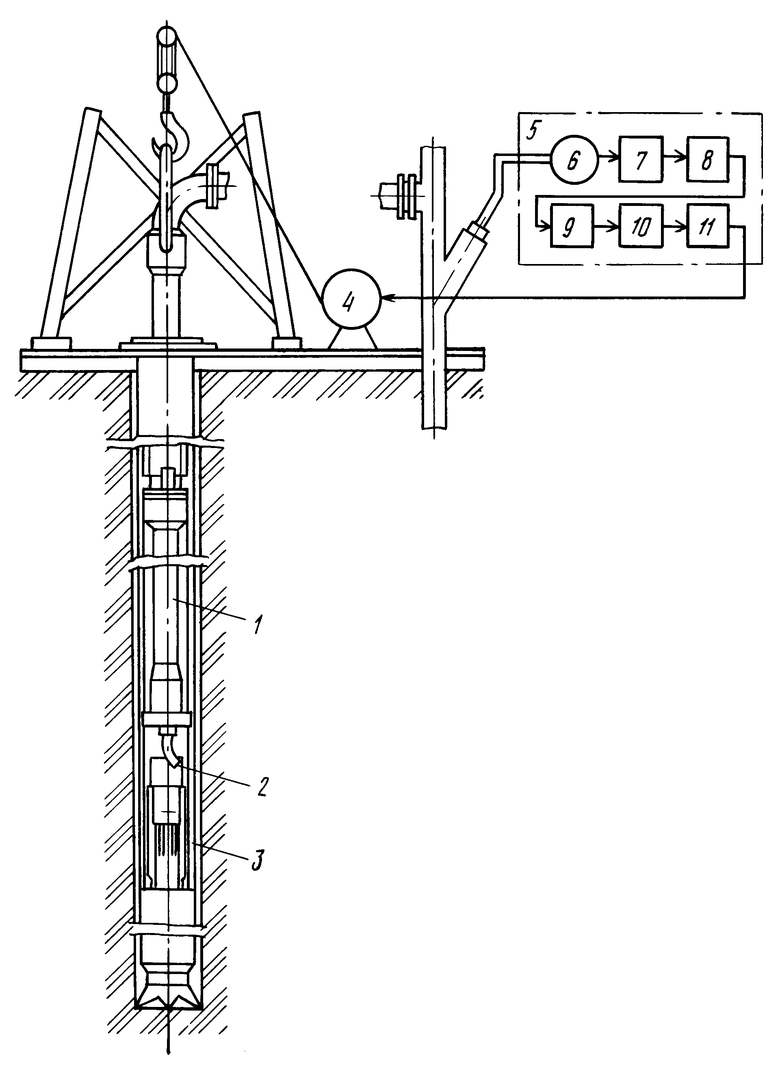
На чертеже показана структурная схема устройства.
Устройство для управления режимом работы гидравлического забойного двигателя состоит из глубинного датчика 1, входная ось 2 которого связана с валом забойного двигателя 3, регулятора 4 нагрузки на долото и аппаратурного блока 5, содержащего электромеханический приемник-преобразователь 6 импульсов давления, фильтр-усилитель 7, компаратор 8, блок 9 идентификации, микропроцессорный блок 10 управления и преобразователь 11.
При включении буровых насосов (бурильная колонна приподнята над забоем) начинает вращаться забойный двигатель 3, приводя в действие через входную ось 2 механизм глубинного датчика 1. Через определенное число оборотов вала забойного двигателя глубинный датчик генерирует в буровом растворе импульсы давления с периодом следования, пропорциональным частоте вращения, которые, поступая на устье скважины, преобразуются электромеханическим приемником-преобразователем 6 в электрические сигналы. Пройдя через фильтр-усилитель 7, эти сигналы отфильтровываются от помех и поступают на компаратор 8, на выходе которого формируются прямоугольные импульсы. Сформированные прямоугольные импульсы поступают в блок 9 идентификации, где в режиме идентификации осуществляется анализ частоты вращения вала турбобура в режиме холостого хода, определяется и запоминается рабочая частота вращения, соответствующая максимуму механической мощности конкретного типа забойного двигателя.
Значение выбранной рабочей частоты вращения передается в микропроцессорный блок 10 управления и запоминается в нем в качестве уставки. В рабочем режиме в блоке 10 осуществляется сопоставление фактических (текущих) значений частоты вращения забойного двигателя и значения уставки, на основе которого формируется сигнал рассогласования, поступающий на вход преобразователя 11. Сформированный в преобразователе 11 сигнал управления поступает на регулятор 4 подачи долота, посредством которого осуществляется необходимое изменение тормозного усилия на барабане лебедки. Так, например, при значении частоты вращения забойного двигателя в рабочем режиме выше уставки посредством сформированного сигнала управления осуществляется более интенсивное растормаживание барабана лебедки до момента достижения забойным двигателем частоты вращения, равной значению уставки. И наоборот, при значении частоты вращения ниже уставки осуществляется подтормаживание барабана лебедки до момента достижения забойным двигателем частоты вращения, равной значению уставки.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ НАКЛОННЫХ УЧАСТКОВ СКВАЖИНЫ | 1992 |
|
RU2057923C1 |
| ЗАБОЙНЫЙ АВТОНОМНЫЙ ИНДИКАТОР ДЛЯ ИССЛЕДОВАНИЯ СКВАЖИН | 1991 |
|
RU2026974C1 |
| КОМПОНОВКА ДЛЯ БУРЕНИЯ СКВАЖИНЫ | 1996 |
|
RU2107816C1 |
| СПОСОБ УПРАВЛЕНИЯ ОТКЛОНИТЕЛЕМ ПРИ БУРЕНИИ СКВАЖИНЫ КОМПОНОВКОЙ С ЗАБОЙНЫМ ДВИГАТЕЛЕМ | 1998 |
|
RU2144604C1 |
| КОМПОНОВКА ДЛЯ БУРЕНИЯ СКВАЖИНЫ | 1993 |
|
RU2085692C1 |
| УСТРОЙСТВО ДЛЯ ОТБОРА ПРОБ ИЗ ШЛАМА В ПРИЗАБОЙНОЙ ЧАСТИ СКВАЖИНЫ | 1996 |
|
RU2109919C1 |
| ГИДРАВЛИЧЕСКИЙ ЗАБОЙНЫЙ ДВИГАТЕЛЬ | 2002 |
|
RU2232859C2 |
| ЗАБОЙНАЯ ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА С НАДДОЛОТНЫМ МОДУЛЕМ И СПОСОБ БЕСПРОВОДНОЙ ПЕРЕДАЧИ ЕЕ ДАННЫХ НА ЗЕМНУЮ ПОВЕРХНОСТЬ | 2013 |
|
RU2549622C2 |
| КОМПОНОВКА НИЗА БУРИЛЬНОЙ КОЛОННЫ ДЛЯ НАПРАВЛЕННОГО БУРЕНИЯ СКВАЖИНЫ | 1998 |
|
RU2148696C1 |
| СПОСОБ И СИСТЕМА ДЛЯ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ БУРЕНИЕМ СКВАЖИНЫ | 2019 |
|
RU2697988C1 |
Использование: изобретение относится к буровой технике и предназначено для управления режимом работы забойных гидравлических двигателей при бурении скважин. Сущность изобретения: для повышения эффективности бурения колонну бурильных труб приподнимают над забоем скважины, осуществляют измерение частоты вращения вала забойного двигателя в режиме холостого хода, производят автоматически идентификацию рабочей частоты вращения, соответствующей режиму максимальной механической мощности, передаваемой долоту, который поддерживают в процессе бурения. При этом момент проведения очередной идентификации определяют по величине расхода прокачиваемого бурового раствора на входе в бурильную колонну или по величине давления бурового раствора в нагнетательной линии скважины. Для осуществления способа предназначено устройство, которое снабжено блоком идентификации рабочей частоты вращения, соединенным по входу с компаратором, а по выходу с микропроцессорным блоком управления. 2 с. и 2 з.п. ф-лы, 1 ил.
СПОСОБ УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ЗАБОЙНОГО ГИДРАВЛИЧЕСКОГО ДВИГАТЕЛЯ ПРИ БУРЕНИИ СКВАЖИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Патент США N 4491186, кл | |||
| Ручной прибор для загибания кромок листового металла | 1921 |
|
SU175A1 |

