Изобретение относится к оборудованию лесной промышленности и может быть использовано на лесопромышленных складах для раскряжевки хлыстов и разделки долготья. Станок обеспечивает поперечную распиловку одного или нескольких хлыстов (долготья), расположенных в щеть.
Известен круглопильный станок, содержащий приводной двигатель на станине, который соединен гибкой передачей с входным валом планетарного механизма, при этом вал сателлита установлен в балансирной раме и соединен кинематической передачей с пильным валом, а водило выполнено в виде шкива и снабжено тормозом, причем цепи управления тормозов включены в цепь питания приводного двигателя (авт.св. СССР N 1085816, кл. B 27 B 5/00).
Недостатком станка является несогласованность приводов пильного механизма и транспортера подачи хлыстов под пилу, что требует высокой внимательности оператора. Включать транспортер хлыстов приходится только после полной остановки пильного механизма, что увеличивает время выполнения одного пропила и соответственно снижает производительность раскряжевки.
Известен также круглопильный станок, содержащий транспортер, станину, балансирную раму с дисковой пилой, планетарный механизм привода и надвигания пилы с тормозами, электродвигатель, дополнительный планетарный механизм, вал водила которого кинематически связан с подающим транспортером.
Однако этот станок характеризуется недостаточной синхронностью работы двух планетарных механизмов, а также громоздкостью конструкции открытых зубчатых передач, что ведет к усложнению конструкции станка и низкой надежности работы планетарных механизмов.
Цель изобретения - повышение синхронизации движения пильного механизма и транспортера подачи лесоматериала.
Цель достигается тем, что между планетарным пильным механизмом станка и ведущим шкивом транспортера установлена коробка перемены передач, у которой один выходной вал кинематически (через блок шестерен) связан с планетарным механизмом, а другой выходной вал через блок шестерен связан с валом ведущего шкива транспортера. В планетарном пильном механизме центральное колесо внутреннего зацепления выполнено неподвижным. Входной вал коробки перемены передач соединен с электродвигателем клиноременной передачей.
Сущность изобретения заключается в использовании коробки передач для изменения скорости подачи пилы на хлыст и одновременно скорости подачи хлыста под пилу. Совокупность признаков обладает новизной и позволяет получать целостную конструкцию станка, обеспечивающую жесткую синхронизацию перемещения инструмента и предмета обработки. Один планетарный механизм исключен, а в оставшемся оставлены только два тормоза: для фиксации рамы пилы в заданном месте и для фиксации транспортера.
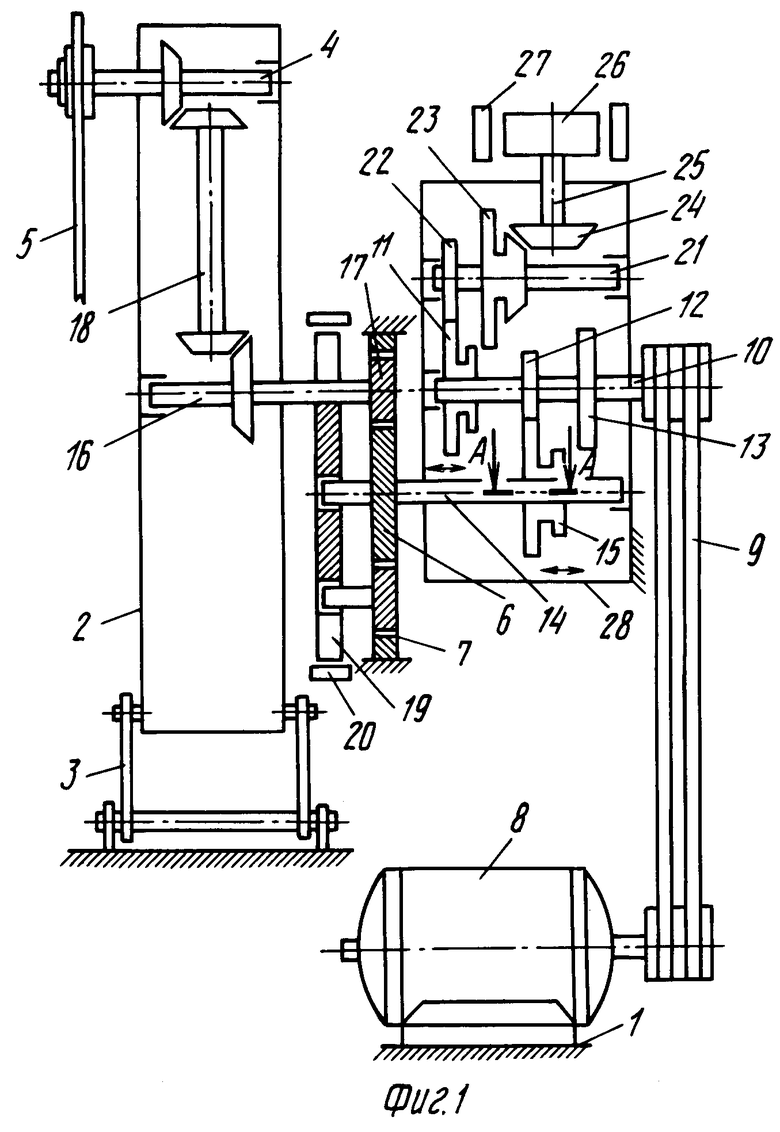
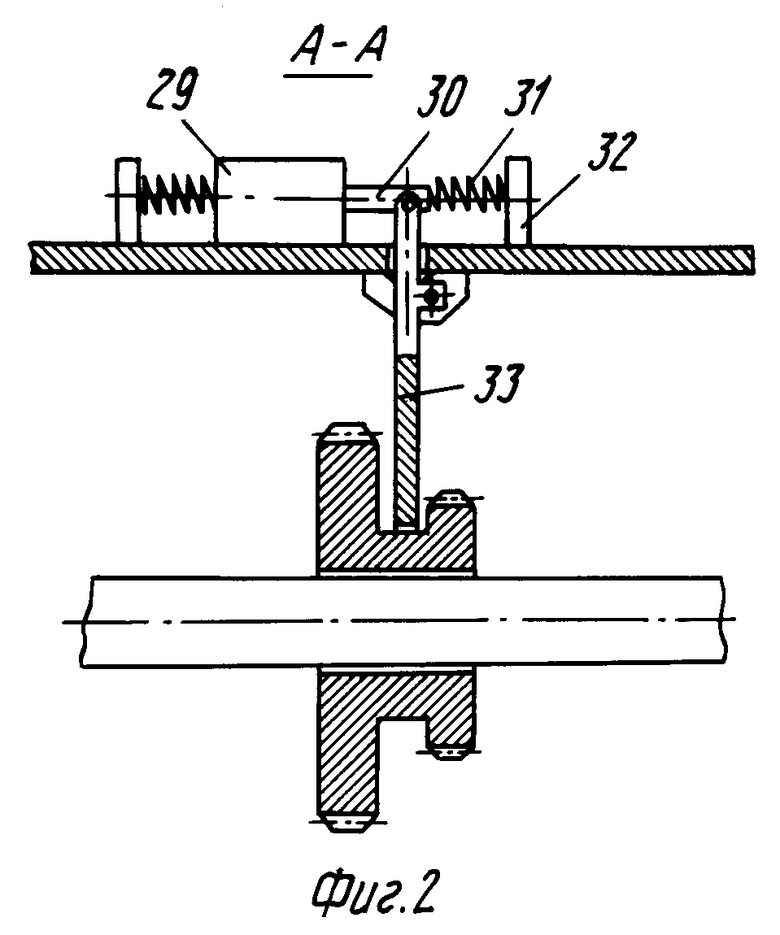
На фиг.1 изображена кинематическая схема круглопильного станка; на фиг. 2 - разрез А-А на фиг.1.
Круглопильный станок включает станину 1, балансирную раму 2 с коромыслом 3. На конце рамы смонтирован вал 1 с дисковой пилой 5. Станок включает коробку перемены передач и планетарный механизм.
Планетарный механизм надвигания пилы на хлыст содержит центральное колесо 6 внешнего зацепления, центральное неподвижное колесо 7 внутреннего зацепления.
Приводной двигатель 8 установлен на станине 1 и соединен гибкой передачей 9 с входным валом 10 коробки перемены передач, на котором установлены подвижный блок шестерен 11 и неподвижные шестерни 12 и 13. Входной вал 14 планетарного механизма, на котором подвижно установлен блок шестерен 15, является одним из выходных валов коробки передач. Вал 16 одного из сателлитов 17 установлен в балансирной раме 2 и соединен с помощью кинематической передачи 18 с пильным валом 4. Водило 19 планетарного механизма выполнено в виде шкива и снабжено тормозом 20. Кинематическая передача 18 выполнена ускоряющей зубчато-конической.
На втором выходном валу 21 коробки перемены передач неподвижно установлены шестерня 22 и блок шестерен 23. Вал 21 через одну из шестерен 23 с помощью зубчато-конической передачи 24 связан с валом 25 ведущего шкива 26 транспортера подачи лесоматериала. Причем зубчато-коническая передача 24 и подшипники вала 25 установлены в корпусе 28 коробки перемены передач.
Подвижные блоки шестерен 11 и 15 могут быть выполнены многоступенчатыми с дополнительными валами, например, по аналогии с конструкцией коробки скоростей автомобиля или токарного станка. Это позволяет менять режим резания в зависимости от свойств распиливаемой древесины.
Электромагнит 29 (фиг.2) крепится к корпусу 28 коробки переменных передач. Сердечник 30 электромагнита 29 соединен с пружиной 31, которая крепится к опоре 32. Сердечник 30 также соединен с вилкой 33, которая переключает блок шестерен 15. Вилка 33 шарнирно соединена с корпусом 28.
Станок работает следующим образом.
В исходном состоянии блоки шестерен 11 и 15 выведены из зацепления. При включении двигателя движение поступает через передачу 9 на входной вал 10 коробки перемены передач. Одновременно с включением двигателя 8 подается электропитание на схему управления станком. При этом срабатывают тормоз 20 водила 19 и тормоз 27 транспортера. Для подачи хлыста под пилу вводится в зацепление блок шестерен 11 (фиг.2). Вращение передается через блок шестерен 23 на шестерню 24 и ведущему шкиву 26 транспортера. После подачи хлыста на заданную длину выводится из зацепления блок шестерен 11 и включается тормоз 27.
Для надвигания пилы 5 на заготовку выключают тормоз 20 и вводят в зацепление блок шестерен 15 с шестерней 12 или 13. Вращение передается на вал 14 и далее к центральному колесу 6. Далее вращение передается на сателлит 17, который перекатывается по неподвижному колесу 7, увлекая за собой водило 19 и вал 16 вместе с балансирной рамой 2. Балансирная рама 2 совершает качательное движение по эллипсной траектории, пила 5 распиливает заготовку (один хлыст или несколько хлыстов, расположенные в щеть). После возвращения пилы 5 в исходное положение выводится из зацепления блок шестерен 15 и включается тормоз 20. Если вращение передается от шестерни с наименьшим радиусом к шестерне с большим радиусом, то пила 5 получает наименьшую скорость, если наоборот, то пила 5 получает наибольшую скорость подачи. Если выводить из зацепления весь блок шестерен 15 от шестерни 12 или 13, то пила 5 остановится. Таким образом, скорость вращения пилы согласуется со скоростью ее подачи на хлыст, что позволяет принимать оптимальные режимы стружкообразования и получать качественную щепу вместо опилок.
Скорость подачи заготовки регулируют за счет изменения передаточного отношения блока шестерни 11 с шестерней 22 и с блоком шестерен 23. Если передаточное отношение большое, то хлыст получает максимальную скорость подачи, это дает возможность плавной и быстрой подачи заготовки. В начале подачи заготовки передаточное отношение малое и хлыст трогается с малой скоростью, затем, меняя передаточное отношение, скорость подачи ускоряется до максимальной и к концу подачи, уменьшая передаточное отношение, скорость подачи уменьшается.
Для автоматического ввода и вывода в зацепление шестерен применяют электромагниты, которые от нагрузки меняют передаточное отношение путем ввода и вывода в зацепление шестерен. Тормоз 20 работает автоматически и регулируется с электромагнитом блока шестерен 15.
Предлагаемый круглопильный станок имеет высокую производительность за счет синхронизации движения, наложения их во вращении. Так, например, после выполнения пропила вал 4 пилы 5 по эллипсной траектории опускается и зубья пилы выходят из пропила. В этот момент можно выводить из зацепления блок шестерен 15, включать тормоз, вводить в зацепление блок шестерен 11 и далее начинать движение хлыста. Возможна подача хлыста на длину оптимального сортимента за время обратного хода пилы до исходного положения. В этом случае следующий пропил выполняется без остановки движения вала 4 по эллипсной траектории, но с синхронизацией пути движения рамы с блоком шестерен 11.
Благодаря единому приводу механизмов пиления и подачи заготовки предлагаемый круглопильный станок обладает высокой производительностью, качеством вырабатываемой стружки. Кроме того, достигнута простота конструкции за счет введения серийных коробок перемены передач, их узлов и деталей.
Электродвигатель 8 и вал 10 постоянно вращаются, и при наличии маховика пиковые нагрузки от включения и выключения пилы 5, рамы 2 и транспортера 26 преодолеваются энергией маховика. Синхронизация достигается по всем трем движениям: вращения пилы, подачи ее на хлыст, движения хлыста под пилу.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРУГЛОПИЛЬНЫЙ СТАНОК | 1997 |
|
RU2141893C1 |
| КРУГЛОПИЛЬНЫЙ СТАНОК | 2005 |
|
RU2286875C2 |
| Круглопильный станок | 1982 |
|
SU1074714A1 |
| КРУГЛОПИЛЬНЫЙ СТАНОК | 1998 |
|
RU2137597C1 |
| КРУГЛОПИЛЬНЫЙ СТАНОК | 1997 |
|
RU2117573C1 |
| КРУГЛОПИЛЬНЫЙ СТАНОК | 2002 |
|
RU2232673C2 |
| КРУГЛОПИЛЬНЫЙ СТАНОК | 2000 |
|
RU2175286C1 |
| Круглопильный станок | 1987 |
|
SU1713801A1 |
| Круглопильный станок | 1979 |
|
SU859150A1 |
| Круглопильный станок | 1988 |
|
SU1569236A1 |
Использование: в лесной промышленности для распиловки лесоматериалов. Сущность изобретения: в круглопильном станке между планетарным механизмом надвигания пилы и транспортером установлена коробка перемены передач, обеспечивающая синхронизацию движений пильного механизма и ведущего шкива транспортера. 1 з.п. ф-лы, 2 ил.
| Круглопильный станок | 1988 |
|
SU1569236A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
