Изобретение применимо в электромобилях, в авто-, авиа-, вело-, судостроении и других областях, где конструкция аппарата подвергается механическим колебаниям.
Известно устройство для преобразования веса живого тела в энергию, приводимое в действие весом тела человека или животного, например лошади, к которому прикреплено устройство (например, к ногам человека или рядом с копытом лошади), вырабатывающее механическую энергию, которая затем переводится в электрическую, используемую для нужд человека или животного (например, в приборах, прикрепленных к одежде человека) [1]
Первое отличие аналога от заявляемого способа заключается в применении такого внешнего воздействия, как вес, в узкой области "аппаратов" (человек, животное), которые при своем движении (ходьбе, беге) создают колебания частей или всего устройства. Механическая энергия этих колебаний затем преобразуется в электрическую. В заявляемом способе нет такого ограничения: воздействие весом применяют к различным аппаратам, например к автомобилю (деформация покрышки колеса, колебания частей при движении автомобиля).
Второе отличие заключается в использовании только одного внешнего воздействия веса, возбуждающего механические колебания конструкции аппарата. В заявляемом способе такого ограничения нет: в качестве внешних воздействий могут рассматриваться ветер, акустическое и электромагнитное поля и т.п.
Третье отличие заключается в том, что в заявленном способе механические колебания, преобразуемые в электрическую энергию, могут возбуждаться не только внешними, но и внутренними воздействиями, порождаемыми при работе аппарата, например вибрации кузова самоходного аппарата при работе его двигателя. При этом причиной возникновения механических колебаний в конструкции могут одновременно служить и внешние, и внутренние воздействия.
Четвертое отличие заключается в использовании в заявленном способе эффекта уменьшения энергии механических колебаний при трансформации ее в электрическую для подавления непредусмотренных (паразитных) колебаний в конструкции аппарата.
Известны методы получения сигнала на приемных устройствах акустических станций [2]
Общим признаком здесь является механическая деформация приемного устройства акустическим полем, преобразуемым в электрическую энергию сигнала элементом из пьезомагнитострикционных материалов.
Прототипом способа является по своей технической сущности и достигаемому результату [3]
Отличие заключается в том, что в нашем случае пьезоэлемент работает при любых амплитудах вибрации, момент съема устанавливается независимо от амплитуды вибрации, а съем энергии производят непосредственно с пьезоэлемента. Устройство работает при амплитудах, не меньших заданным, определяемых элементами конструкции, например величиной и формой L-образной прорези для пальца.
Задача, которую решает изобретение, возвращение части энергии, рассеиваемой при механических колебаниях конструкции, за счет установки в деформируемых и вибрирующих ее деталях пьезомагнитострикционных элементов (элементов первой группы), играющих роль механоэлектрических преобразователей энергии. Снимая энергию с таких элементов, пополняют запас энергии на аппарате.
Второй задачей является подавление паразитных колебаний конструкции в процессе пополнения запаса энергии на аппарате с помощью элемента второй группы. При объяснении механизма действия такого "комбинированного" режима необходимо учесть, что механические напряжения в элементе создаются внешними воздействиями окружающей среды, соседних деталей конструкции, а также электрическим полем зарядов, возникших на элементе при его механической деформации. Иными словами возникающее при деформации элемента электростатическое или электромагнитное поле создает в материале элемента соответствующие механические напряжения σэ. При снятии с элемента ("исчезновении") этого поля напряжение σэ, оказавшись нескомпенсированным электрической напряжен- ностью, вызывает деформацию элемента, которая передается на соседние детали конструкции. Электрический разряд элемента осуществляется в течение некоторого интервала времени, зависящего от постоянной времени τс схемы съема электрической энергии с элемента. Переменная сила, обусловленная σэ, действует на соседние детали конструкции в течение, по крайней мере, этого интервала времени. Поэтому, выбирая фазу паразитного колебания элемента, при которой начинается съем с него электрической энергии, можно подействовать на соседние детали импульсом силы, ослабляющим их паразитное колебание. Группа таких элементов ослабляет и пространственное паразитное колебание.
При ослаблении паразитного колебания уменьшается и мощность электрической энергии, снимаемой с указанной группы элементов. Это приводит к уменьшению импульса противодействующей паразитным колебаниям силы, что может приводить к снижению затухания паразитного колебания. При этом если мощность этих колебаний ослабляется ниже допустимого для конструкции уровня, то энергетически выгодней перейти к режиму пополнения запаса энергии на аппарате (первая задача изобретения). Для этого выбирают фазу паразитного колебания для начала разряда элемента, исходя из условия съема с него наибольшей в имеющейся ситуации электрической энергии. Если после этого мощность паразитного колебания начинает опять возрастать и превосходит допустимый для конструкции предел, то необходимо указанную группу элементов опять перевести в режим подавления паразитного колебания и т.д. В случае возникновения процесса многократного переключения указанных режимов работы для уменьшения частоты этих переключений указанный допустимый уровень (порог) мощности, снимаемой с группы элементов, расщепляют на два верхний и нижний.
При заявляемом способе за счет возвращения части непроизводительно расходуемой на аппарате энергии диссипация ее относительно сокращается, благодаря чему уменьшается загрязнение окружающей среды.
Согласно ГОСТ 13927-80 для пьезокерамики ЦТСНВ-1 при продольном пьезоэффекте коэффициент электромеханической связи Кэмс равен 0,72 (для магнитостриктора материал пермендюр Кэмс равен 0,49). Таким образом, с учетом того, что Кэмс2 равен 0,515 (Кэмс2 0,249), заключают, что элементы из этих и подобных им материалов могут трансформировать в электрическую от 25 до 50% энергии механических колебаний.
В процессе механических деформаций элемента количество электрической энергии, которое можно снять с него, изменяется в течение цикла деформации. Например, таким образом меняется напряжение на пьезоэлементе. Энергетически выгодно начинать снимать его в моменты, предшествующие моментам достижения модулем напряжения своих наибольших значений. При этом величина такого упреждения зависит от τc постоянной времени системы съема.
Задачу подавления паразитных колебаний решают, исходя из общего принципа: интервал съема напряжения должен располагаться в пределах цикла колебаний таким образом, чтобы упомянутое нескомпенсированное механическое напряжение σэ действовало в противофазе с механическим напряжением, обусловленным действием на элемент внешней среды и соседних деталей конструкции.
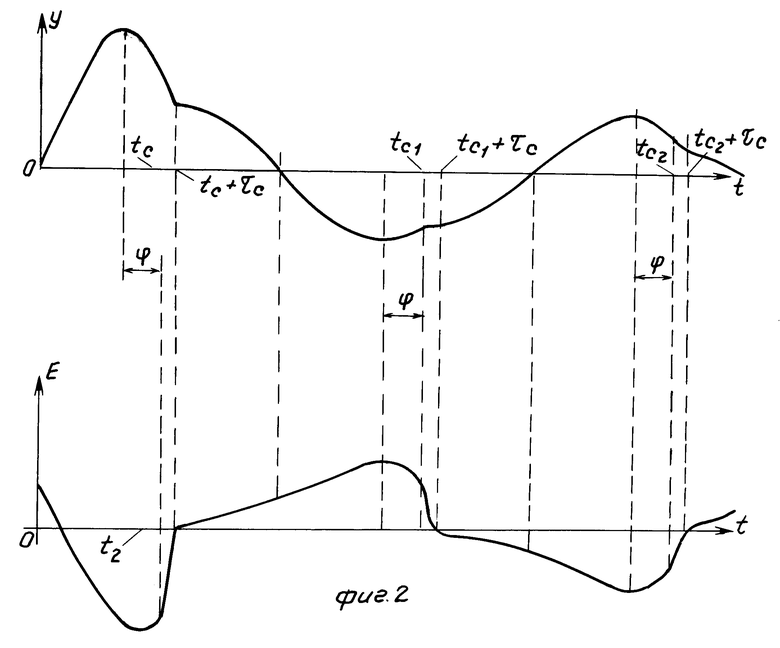
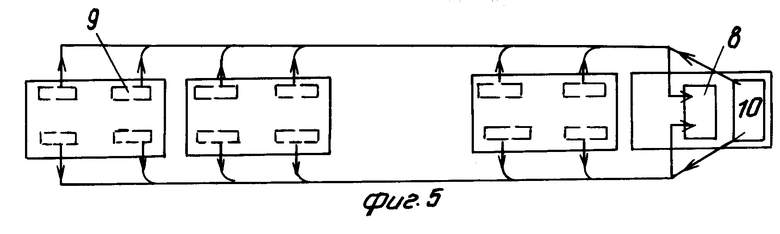
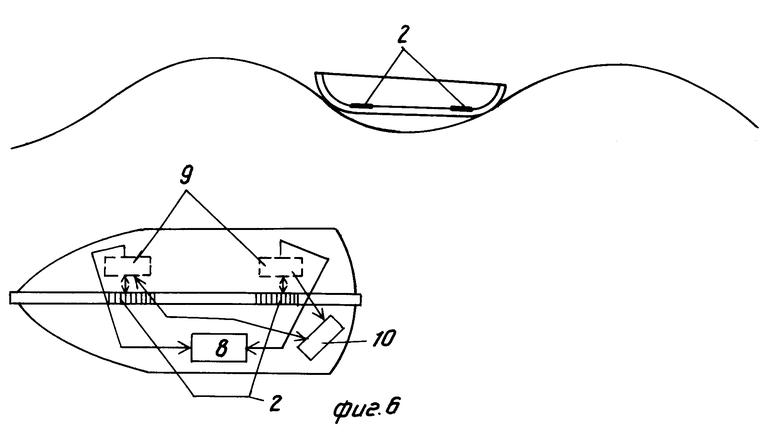
На фиг. 1 схематично изображена рессора с пьезокерамическим слоем для снятия энергии с одновременным демпфированием; на фиг. 2 изображены временные графики демпфирования колебаний рессоры со снятием электрической энергии; на фиг. 3 изображен автомобиль; на фиг. 4 показано размещение элементов первой и второй групп на автомобиле; на фиг. 5 изображена схема съема энергии с рессор колес поезда; на фиг. 6 схема съема энергии на катере.
При расположении в каждом поршне цилиндров мотоцикла ИЖ-ЮЗ керамического стержня из ЦТСНВ-1 диаметром 60 мм и длиной 50 мм мощность, снимаемая с них на максимальных оборотах (6500 об/мин), составляет около 7 Вт. Эту мощность можно использовать в электросистемах мотоцикла.
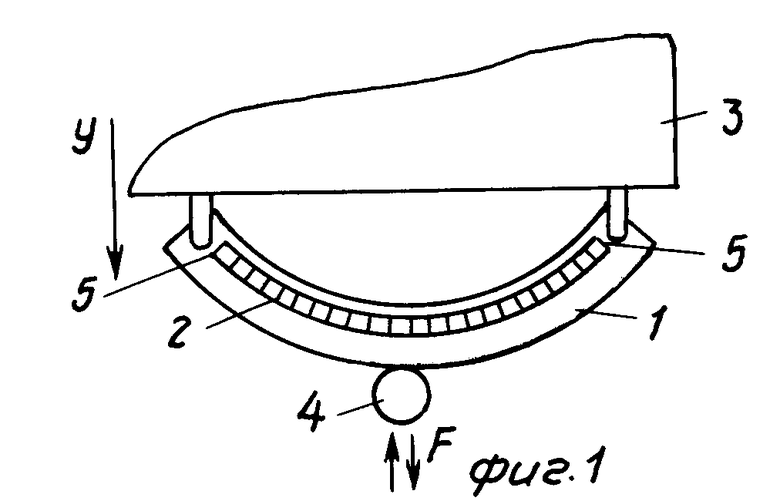
Рессора на фиг. 1 служит кроме демпфирования для получения электрической энергии при демпфировании колебаний экипажа. Она содержит корпус 1 с вмонтированной в него пьезокерамической прокладкой 2, которая может скользить по цилиндрической поверхности корпуса и упирается своими торцами 5 в корпус. Рессора закреплена на корпусе 3 экипажа, который воздействует на нее с силой F через ось 4.
При воздействии импульсов силы F рессора изгибается и колеблется, при этом прокладка 2 может сжиматься и расправляться. При колебаниях Y рессоры на торцах прокладки 2 возникает электрическое переменное напряжение Е, которое снимается в моменты tc, tc1,tc2, (фиг. 2), благодаря чему амплитуда Y колебаний уменьшается примерно в cos2ϕраз, а собственная частота ωэтих колебаний в 1 + ϕ/π раз, где ϕ- фазовый угол между максимальным значением и точкой съема напряжения.
Если сила F является гармоникой с частотой ωF, большей ω, то уменьшение амплитуды колебаний достигается за счет выбора такого угла ϕ, который отдаляет частоту ωот резонансного значения ωF. В качестве одной из схем, наиболее характерно реализующих заявленный способ, представлено устройство (фиг. 4), установленное на автомобиле. Устройство содержит рессоры 1 с установленными в них пьезоэлектрическими элементами, поршневую группу 6 мотора автомобиля с вмонтированными в каждый поршень каждого цилиндра пьезоэлектрическими элементами. Для снятия энергии с поршней в схеме предусмотрены съемники с преобразователями 7, подсоединенные к аккумулятору 8. Пьезоэлементы поршней отнесены к первой группе элементов, а пьезоэлементы рессор к второй. Для управления работой пьезоэлементов рессор в схеме предусмотрены схемы 9 управления, режим работы которых задает центральный распределитель 10, который использует фазу, амплитуду и скорость колебаний рессор, полученные от измерителя 11. Для выдачи команд на рессоры предусмотрен формирователь 12 величины τc и размещения временных интервалов съема.
Если снимаемая мощность колебаний рессор больше высокого порога Pmax или меньше низкого порога Рmin, то распределитель 10 меняет режим работы рессор. Если подавление колебаний происходит эффективно, то после падения снимаемой мощности за установленный низкий порог Pmin пьезокерамическая прокладка 2 начинает работать в режиме съема энергии. Этого можно достигнуть, например, за счет сдвига момента tc в положение t2 (фиг. 2), где Е при t2 принимает свое наибольшее значение. При этом уменьшается угол ϕи из-за этого может увеличиться собственная частота ω, благодаря чему через время переходного процесса может возникнуть колебание с увеличенной амплитудой и после превышения снимаемой мощностью верхнего порога Рmax вновь происходит переключение работы элемента в режим подавления колебаний.
Эффективное подавление вибраций может быть получено и в случае распределенных систем. Примером таких систем является поезд (состав, фиг. 5) и катер (фиг. 6). В первом случае периодические силы появляются из-за периодического изменения жесткости полотна железной дороги (стыки рельс, середины рельса) при движении поезда с некоторой скоростью. Легче оснастить вагоны управляемыми рессорами, чем переделывать полотно железной дороги. Во втором случае периодические силы могут возникнуть за счет движения катера при периодическом волнении вдали от изрезанных берегов. В случае поезда указанное уменьшение амплитуды приводит к увеличению безопасности движения, в случае катера к уменьшению деформации его корпуса и тем самым к возможности движения его с той же скоростью при большем волнении моря. Частота вынужденных колебаний изменяется при изменении скорости движения поезда или катера, изменении курса движения катера.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДАВЛЕНИЯ ПАРАЗИТНЫХ КОЛЕБАНИЙ КОНСТРУКЦИИ | 1991 |
|
RU2044170C1 |
| КОЛЕСО С ТРАНСФОРМАЦИЕЙ ЭНЕРГИИ МЕХАНИЧЕСКОЙ ДЕФОРМАЦИИ В ЭЛЕКТРИЧЕСКУЮ | 1995 |
|
RU2085015C1 |
| СВЕТОИЗЛУЧАТЕЛЬ | 1993 |
|
RU2064712C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОЛЬЦЕОБРАЗНОГО ЛАЗЕРНОГО ИЗЛУЧЕНИЯ И ЛАЗЕРНОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2035099C1 |
| ИНДУКТОР ДЛЯ НАГРЕВА ФЕРРОМАГНИТНОГО МАТЕРИАЛА | 1995 |
|
RU2072118C1 |
| СПОСОБ ПОДАЧИ ЖИДКОСТЕЙ С РУЧНОЙ РЕГУЛИРОВКОЙ ВО ВНЕШНЮЮ СРЕДУ | 1992 |
|
RU2046675C1 |
| УСТРОЙСТВО ДЛЯ МНОГОКРАТНОЙ ПОДАЧИ ЖИДКОСТИ С РУЧНОЙ РЕГУЛИРОВКОЙ ВО ВНЕШНЮЮ СРЕДУ | 1993 |
|
RU2043790C1 |
| Устройство для измерения постоянной величины с аддитивным станционарным шумом | 1976 |
|
SU721761A1 |
| Гребенчатый фильтр-накопитель | 1977 |
|
SU653732A1 |
| ЛИНИЯ ПЕРЕДАЧИ И ПРИЕМА НА КОЛЬЦЕОБРАЗНОМ ИЗЛУЧЕНИИ ЛАЗЕРА | 1997 |
|
RU2113058C1 |


Использование: в энергетике, в частности в транспортной технике. Сущность изобретения: за счет съема энергии с размещенных в аппарате пьезо-и/или магнитострикционных элементов при механических колебаниях его конструкции решаются задачи выполнения запаса энергии на аппарате, подавления паразитных колебаний в его конструкции. Подавление паразитных колебаний производят на базе обратного пьезо-и/или магнитострикционного эффекта, снимая с элементов напряжение от действующих на них в противофазе паразитных механических колебаний. В зависимости от степени подавления этих колебаний и текущей ситуации все элементы на аппарате подразделяют на группы и устанавливают на каждой из них свои пороги, при превышении электрической мощностью, снимаемой с элементов группы, большего из которых группу переводят в режим подавления колебаний, а при падении указанной мощности ниже меньшего порога группу переводят в режим пополнения запаса энергии на аппарате. 6 ил.
СПОСОБ ПОЛЕЗНОГО ИСПОЛЬЗОВАНИЯ ЧАСТИ ЭНЕРГИИ, РАССЕИВАЕМОЙ ПРИ МЕХАНИЧЕСКИХ КОЛЕБАНИЯХ КОНСТРУКЦИИ АППАРАТА, заключающийся в размещении на корпусе аппарата рабочих пьезомагнитострикционных элементов с последующим снятием с них энергии деформации, отличающийся тем, что рабочие элементы в аппарате размещают в местах возникновения колебаний в виде двух групп, одна из которых является первой группой, с которой снимают энергию только для пополнения запаса энергии на аппарате, а другая является второй группой, на базе которой организуют два режима работы, где первый режим пополнения запаса энергии на аппарате и второй пополнение запаса энергии с подавлением паразитных колебаний его конструкции, причем рабочим элементом, входящим в группу первого вида, назначают постоянно первый режим работы, а для каждой из групп второго вида устанавливают свой низкий и свой высокий пороги, при превышении мощности, снимаемой с любой группы второго вида своего высокого порога, назначают второй режим работы элементам этой группы, при падении мощности ниже низкого порога назначают первый режим работы элементам этой группы, для реализации каждого заданного режима работы для каждого элемента группы выбирают продолжительность и расположение интервалов съема энергии в пределах каждого цикла механических колебаний, а снимают энергию с каждого элемента группы.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Патент США N 4297609, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
