Изобретение относится к машиностроению, конкретнее к автомобиле- и авиастроению и может быть использовано в качестве тяговой силовой установки и реверсивного тормоза на автомобилях, летательных аппаратах, индивидуальных транспортных средствах, приводимых в действие с помощью мускульной силы, а также при создании транспорта универсального типа на инерционной подвеске, движущегося по земле и в воздухе.
Известен инерцедвигатель, в котором неупорядоченные центробежные силы инерции преобразуются в линейную силу, энергия которой вызывает направленное движение, состоящее из четырех систем, в каждой системе установлено по одному дебалансному грузу и одной планетарной передаче общего для всех систем механизма привода.
Однако в указанном инерцедвигателе импульсы результирующей силы центробежных сил инерции (далее ЦСИ) дебалансных грузов, действующих попеременно в одном направлении, а также силы инерции второго порядка моментов инерции масс дебалансных грузов, возникающих при их вращении в плоскостях, перпендикулярных осям вращения систем, будут вызывать вибрационные нагрузки на инерцедвигатель и передавать их на транспортное средство, на котором инерцедвигатель установлен. Кроме того, в кинематической схеме инерцедвигателя диаметры планетарных шестерен не могут быть меньше двух радиусов вращения дебалансных грузов (точнее, длины рамок систем), в этом случае потребуются шестерни больших диаметров и дополнительные большие массы типа маховиков для уравновешивания каждой шестерни планетарной передачи, повышение прочности и увеличение размеров других деталей, что делает конструкцию инерцедвигателя громоздкой и значительно снижает эффективность его применения.
Целью изобретения является создание компактного, работоспособного и простого по конструкции инерцедвигателя с развитыми опорами скольжения дебалансных грузов и рамок, выдерживающими большие нагрузки ЦСИ при вращении дебалансных грузов, обеспечение дифференцирования их результирующей ЦСИ постоянной по величине и однонаправленного действия, а также устранение внешних проявлений вибрационных нагрузок.
Поставленная цель достигается тем, что в каждой системе инерцедвигателя применены дебалансные грузы безосевой конструкции сегментного типа, которые попарно, вместе с их планетарными передачами установлены непосредственно в рамках, опираются своими наружными цилиндрическими поверхностями скольжения на внутренние цилиндрические поверхности скольжения рамки и образуют системы, плоскости вращения дебалансных грузов двух систем повернуты относительно двух других систем на угол 90о, при этом импульсы результирующих сил ЦСИ пар систем смещаются по фазе и дифференцируются в постоянную силу, вызывающую однонаправленное движение инерцедвигателя, а возникающие силы инерции второго порядка моментов инерции вращения дебалансных грузов выравниваются по амплитуде колебаний. Полное устранение проявления силы инерции второго порядка достигается последовательной установкой четырех пар систем, повернутых одной пары относительно другой на угол 45о.
На фиг. 1 изображен инерцедвигатель состоящий из корпуса 1, двух правых систем А1, А3 и двух левых систем А2, А4, механизма вращения систем В. Каждая система состоит из рамки 2, двух дебалансных грузов 3, планетарной передачи С вращения дебалансных грузов 3.
Корпус 1 представляет собой прямоугольную коробчатую форму, в которой расточены четыре сквозных и четыре глухих отверстия, являющиеся опорными подшипниками для рамок 2 систем, со стороны сквозных отверстий крепится крышка 10 корпуса 1 с шестерней привода 9.
Рамка 2 выполнена в виде ротора с наружными опорами скольжения и перпендикулярно пересекающимся цилиндром, внутри которого на опорах скольжения расположены дебалансные грузы с планетарной передачей, фиксируемые от осевого смещения стопорными кольцами, вдоль оси рамки на концах выполнены отверстия для оси шестерни 5 планетарной передачи С и шестерня привода системы 6.
Дебалансный груз 3 представляет собой сектор круга, выполненный несколько больше полукруга, безосевого типа, опорой скольжения служит наружная цилиндрическая поверхность полукруга, которым он опирается на внутреннюю цилиндрическую поверхность скольжения рамки 2, вдоль оси его вращения выполнено отверстие для установки шестерни 4 планетарной передачи. Площади опор скольжения одного дебалансного груза 3 и рамки 2 этого груза на предложенном инерцедвигателе по расчетам могут выдерживать рабочую нагрузку ЦСИ более 1200 кг (при использовании в его конструкции материалов, применяемых в машиностроении).
Планетарная передача С состоит из двух конических шестерен 4, установленных в осевых отверстиях дебалансных грузов 3 и конической шестерни 5, которая своим концом наглухо крепится в отверстии корпуса 1. (В системах А1 и А3 для обеспечения вращения этих систем по часовой стрелке шестерни 5 развернуты на 180о по отношению к таким же шестерням систем А2 и А4, а оси первых удлинены).
Механизм вращения систем В состоит из шестерен привода систем 6, выполненных заодно с рамками 2, промежуточной шестерни 7, расположенной на оси 8 и закрепленной в крышке 10 корпуса 1 шестерни привода 9.
Привод устройства осуществляется от двигателя (или мускульной силой через редуктор) через муфту 11.
Устройство работает следующим образом.
В исходном положении дебалансные грузы 3 систем А1 и А2 направлены в противоположные стороны параллельно осям рамок 2, что соответствует положению центров масс дебалансных грузов 3 в точках 0 и 180о угла поворота систем, импульс результирующей силы ЦСИ вращения их дебалансных грузов 3 равен 0; дебалансные грузы 3 систем А3 и А4 смещены по фазе угла поворота относительно систем А1 и А2 на 90о, их радиусы перпендикулярны плоскости корпуса 1, а импульс результирующей силы ЦСИ имеет максимальную величину. Уменьшение импульса результирующей силы ЦСИ дебалансных грузов 3 систем А3 и А4 компенсируется приращением импульса равной результирующей силы ЦСИ дебалансных грузов 3 систем А1 и А2. Таким образом, смещение угла поворота систем А3 и А4 относительно систем А1 и А2 на 90о обеспечивает дифференцирование результирующих сил ЦСИ вращения дебалансных грузов 3 систем А1, А2, А3, А4 в силу непрерывную, постоянную по величине и однонаправленного действия (см. фиг. 5).
Вращение системам передается от приводного двигателя через муфту 11. При вращении системы конические шестерни 4 обкатываются вокруг шестерни 5 и вращают дебалансные грузы 3 в плоскостях, параллельных продольной оси рамки 2, в результате дебалансные грузы 3 вращаются в противоположные стороны и одновременно в двух перпендикулярных плоскостях: относительно рамки 2 и вместе с рамкой 2 относительно корпуса 1, центры масс дебалансных грузов 3 перемещаются по криволинейным траекториям шаровых поверхностей в зоне 0-180о с угловой скоростью, в два раза большей угловой скорости рамки, импульс результирующей силы ЦСИ вращения дебалансных грузов 3 систем всегда направлен перпендикулярно осям вращения рамок в сторону указанных полусфер. За угол поворота рамки 2 на 180о дебалансные грузы 3 повернутся на угол 360о (см. фиг. 3).
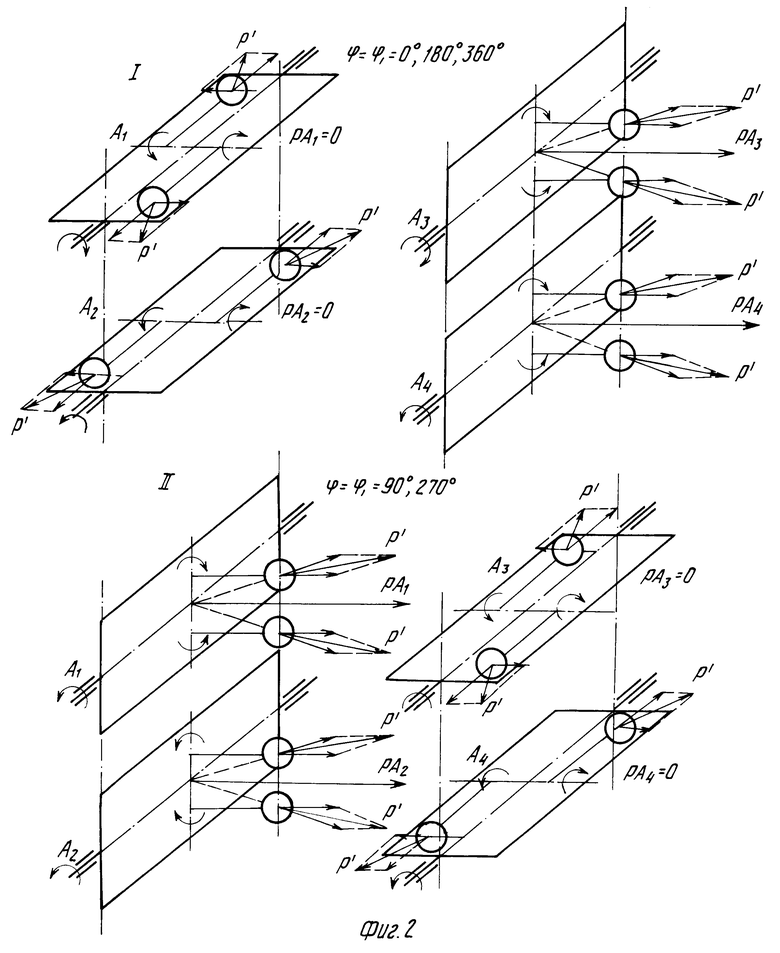
Вращая систему А1 по часовой стрелке (см. фиг. 2, I, II) система А2 вращается против часовой стрелки, угол поворота дебалансных грузов 3 растет и, достигнув угла 90о, радиусы центров их масс займут положение, перпендикулярное плоскости корпуса 1, а импульс результирующей силы дебалансных грузов систем А1 и А2 будет также направлен перпендикулярно плоскости корпуса 1 и приложен к его центру, в то же время системы А3 и А4 вращаются идентично относительно систем А1 и А2, их дебалансные грузы 3 достигнут угла поворота 180о и будут направлены в противоположные стороны, дебалансные грузы 3 вернутся в зону 0-180о, т.е. в исходное положение. Радиусы вращения центров масс дебалансных грузов 3 при нахождении их в положении угла поворота 90о и вращении в плоскости, перпендикулярной продольной оси рамки 2, длиннее реальных радиусов дебалансных грузов 3, составят величину r RSin ϕ˙ctgα за счет асимметрии расположения дебалансных грузов 3 относительно осей вращения рамок 2, и уменьшатся до размера асимметрии при углах поворота 0 и 180о(см. фиг. 3). В точках 0 и 180о массы дебалансных грузов 3 каждой системы создают моменты сил, стремящихся повернуть систему вокруг оси, перпендикулярной оси рамки 2. Моменты указанных сил уравновешиваются взаимным расположением дебалансных грузов 3 систем.
Согласно принципу независимости действия сил при вращении дебалансных грузов 3 систем в двух перпендикулярных плоскостях возникают следующие силы:
P1 результирующая сила ЦСИ вращения дебалансных грузов 3 в плоскостях, проходящих параллельно осям вращения рамок 2 систем А1 и А2;
P2 результирующая сила ЦСИ вращения дебалансных грузов 3 в плоскостях, проходящих перпендикулярно осям рамок 2 систем А1 и А2;
P3 результирующая сила ЦСИ вращения дебалансных грузов 3 систем А3 и А4, равная P1;
P4 результирующая сила ЦСИ вращения дебалансных грузов 3 систем А3 и А4, равная Р2;
P результирующая сила ЦСИ, равная сумме векторов сил P1, P2, P3, P4;
T результирующая сила инерции 2-го порядка, возникающая при вращении дебалансных грузов 3 с переменным радиусом r в плоскости, перпендикулярной оси вращения рамок 2, и смене орбит центрами масс дебалансных грузов 3.
На схеме фиг. 2 и 3 показаны положения дебалансных грузов 3 относительно рамок 2 и рамок 2 относительно плоскости корпуса 1 при вращении систем, а также силы инерции, возникающие в системах и их результирующие.
Величина силы инерции (см. фиг. 2) P1 4mR ω2 Sin2 ϕ где m масса одного дебалансного груза 3, в кг (масса всех дебалансных грузов 3 одинакова);
R радиус центра масс дебалансных грузов 3, в м, (радиус вращения "const");
ω угловая скорость дебалансных грузов 3 относительно собственной оси вращения, в рад/сек;
ϕ угол поворота дебалансных грузов 3 относительно плоскости рамки 2, равный углу поворота рамки 2 относительно плоскости корпуса 1;
Sin2 ϕ произведение синусов углов поворота дебалансных грузов 3 относительно плоскости рамки 2 и рамки 2 относительно плоскости корпуса 1.
Величина силы инерции (фиг. 2 и 3) P2 4mr ω2 2Sin ϕ 4mR ω22Sin2 ϕ т.к. r RSin ϕ . ctg α . cos β где m масса дебалансного груза 3, в кг;
r радиус вращения дебалансных грузов 3 перпендикулярно относительно оси рамки (величина переменная, изменяется от 0 до R), в м;
β угол наклона радиуса r к плоскости вращения дебалансных грузов;
ω угловая скорость дебалансных грузов 3 в рад/с;
ϕ угол поворота дебалансного груза 3 относительно плоскости рамки 2, равный углу поворота рамки 2 относительно плоскости корпуса 1, ϕ'.
Из формулы видно, что силы P1 и P2 равны по величине.
Величина силы инерции (см. фиг. 3)
T  · tgϕ/ где I
· tgϕ/ где I  где I момент инерции дебалансных грузов 3 при смене ими орбит вращения вокруг осей рамок 2, кг˙м/кв;
где I момент инерции дебалансных грузов 3 при смене ими орбит вращения вокруг осей рамок 2, кг˙м/кв;
ω угловая скорость дебалансных грузов 3 в рад/с;
tg ϕ период изменения I;
ϕ угол между радиусом вращения дебалансного груза 3 и вектором равнодействующей касательной и нормальной сил момента инерции I этого груза.
Сила инерции 2-го порядка T изменяется через каждые 90о угла поворота дебалансных грузов 3, эта сила направлена в противоположную сторону силы P и составляет 1-2% ЦСИ вращения дебалансных грузов 3.
Расчетные величины ЦСИ вращения дебалансных грузов 3 с массами m 0,1 кг и радиусе их вращения R 0,02 м, 4000 об/мин систем в описываемом инерцедвигателе сведены в таблицу (см. фиг. 4) и показаны на графике (см. фиг. 5), ориентировочные габаритные размеры инерцедвигателя 160х160х120 мм.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИОННОЕ ДВИЖУЩЕЕ УСТРОЙСТВО ИДУ-4 | 1993 |
|
RU2076241C1 |
| РЕАКТИВНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2003 |
|
RU2238416C2 |
| РЕАКТИВНЫЙ КОМПРЕССИОННЫЙ ДВИЖИТЕЛЬ | 2003 |
|
RU2240431C2 |
| АВТОМОБИЛЬНЫЙ РЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2004 |
|
RU2283435C2 |
| ДВИГАТЕЛЬ | 2005 |
|
RU2285138C1 |
| РОТОРНЫЙ МЕХАНИЗМ ГАЗОРАСПРЕДЕЛЕНИЯ ДВИГАТЕЛЯ | 2004 |
|
RU2276734C1 |
| ИНЕРЦИОННЫЙ ДВИГАТЕЛЬ | 1994 |
|
RU2078996C1 |
| РЕАКТИВНЫЙ ВАКУУМНО-КОМПРЕССИОННЫЙ ДВИЖИТЕЛЬ | 2005 |
|
RU2285817C1 |
| РАБОЧИЙ ОРГАН СМЕСИТЕЛЯ (ВАРИАНТЫ) | 1993 |
|
RU2048876C1 |
| ОБЪЕМНАЯ МАШИНА САВИНА | 1992 |
|
RU2016240C1 |




Использование: энергетика, а также может быть применен в транспортной технике. Сущность изобретения: в устройстве использован принцип взаимодействия пар дебалансных грузов вращающихся относительно друг друга в противоположные стороны и одновременно в перпендикулярных плоскостях. В результате комбинированного вращения дебалансные грузы перемещаются по криволинейным траекториям полусфер шаровых поверхностей, постоянно находясь в зоне 0 - 180 °, а результирующая сила вращения дебалансных грузов всегда направлена в одну сторону. 5 ил.
ИНЕРЦИОННЫЙ ЦЕНТРОБЕЖНЫЙ ДВИГАТЕЛЬ, содержащий корпус, кратные двум вращающиеся в противоположных направлениях в перпендикулярных плоскостях системы, связанные между собой через планетарную передачу, выходной вал которой соединен с приводом, каждая из вращающихся систем состоит из прямоугольных рамок, цапфами установленных на корпусе, в рамках установлены дебалансные грузы, на валах, связанных с передачей, дебалансные грузы установлены с возможностью вращения в противоположных направлениях с центрами масс, перемещающихся по криволинейной траектории, отличающийся тем, что в каждой вращающейся системе рамка выполнена в виде ротора, установленного в корпусе на опорах скольжения с перпендикулярно пересекающимся в нем цилиндром, внутри которого на опорах скольжения расположены дебалансные грузы с планетарной передачей, вращающиеся в цилиндре и выполненные по форме сектора круга, установленные в цилиндре параллельно, плоскости их вращения смещены относительно продольной оси рамки, при этом плоскости вращения дебалансных грузов вращающихся пар систем повернуты одна относительно другой на 90o, а центры масс дебалансных грузов одной пары систем попеременно направлены в противоположные стороны, а другой пары систем попеременно направлены в сторону однонаправленного движения.
| ВЕТРОВАЯ АККУМУЛИРУЮЩАЯ ЭЛЕКТРОСТАНЦИЯ | 1995 |
|
RU2101562C1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
