Изобретение относится к электротехнике и может быть использовано в автоматике, в системах регулирования и управления для контроля перемещения объектов.
Известен герконовый датчик перемещения, содержащий геркон и постоянный магнит, установленный параллельно продольной оси геркона на штанге, которая имеет возможность вращения на оси [1]
Такой герконовый датчик перемещения имеет большой дифференциал хода и вследствие этого узкие эксплуатационные возможности.
Наиболее близким по технической сущности к предлагаемому является герконовый датчик перемещения, содержащий геркон и стержневой постоянный магнит, намагниченный продольно и установленный перпендикулярно продольной оси геркона одним полюсом к области перекрытия контакт-деталей геркона с возможностью контролируемого перемещения вдоль продольной оси геркона [2]
Недостатком такого герконового датчика перемещения является то, что его рабочая характеристика "сигнал на выходе перемещение" несимметрична относительно перекрытия контакт-деталей геркона, что сужает эксплуатационные возможности датчика.
Целью изобретения является расширение эксплуатационных возможностей.
Поставленная цель достигается тем, что в качестве геркона выбран переключающий геркон с размыкающими контакт-деталями, выведенными на одну сторону торца баллона геркона, датчик снабжен штангой и дополнительным герконом, аналогичным основному, штанга установлена на оси вращения и прикреплена к постоянному магниту перпендикулярно к его оси намагничивания, дополнительный геркон расположен таким образом, что его продольная ось параллельна продольной оси основного геркона и перпендикулярна оси намагничивания постоянного магнита, причем оба геркона установлены по отношению друг к другу так, что их замыкающие контакт-детали расположены в противоположных торцах, постоянный магнит установлен таким образом, что области перекрытия контакт-деталей герконов расположены напротив его противоположных полюсов,а указанная ось вращения параллельна оси намагничивания постоянного магнита, причем размер полюсов постоянного магнита в направлении его контролируемого перемещения определяется как
D > 4 ˙ R ˙ tg (A/2), где D размер полюсов постоянного магнита в направлении контролируемого перемещения; R длина штанги; А контролируемый угол срабатывания.
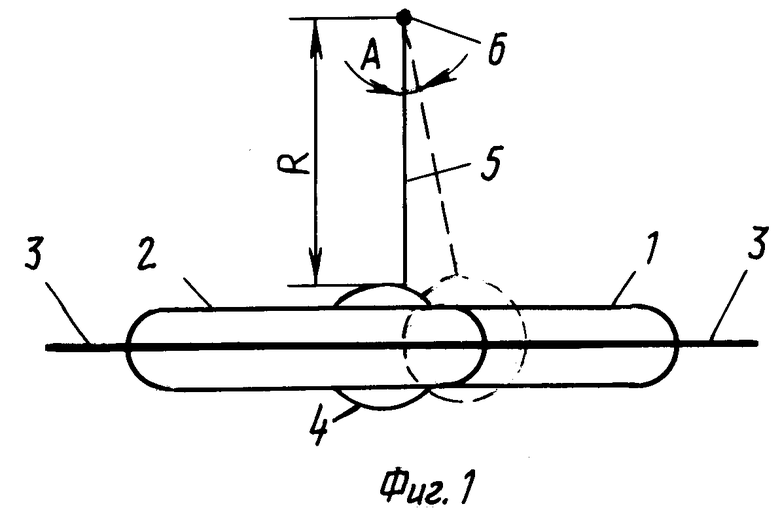
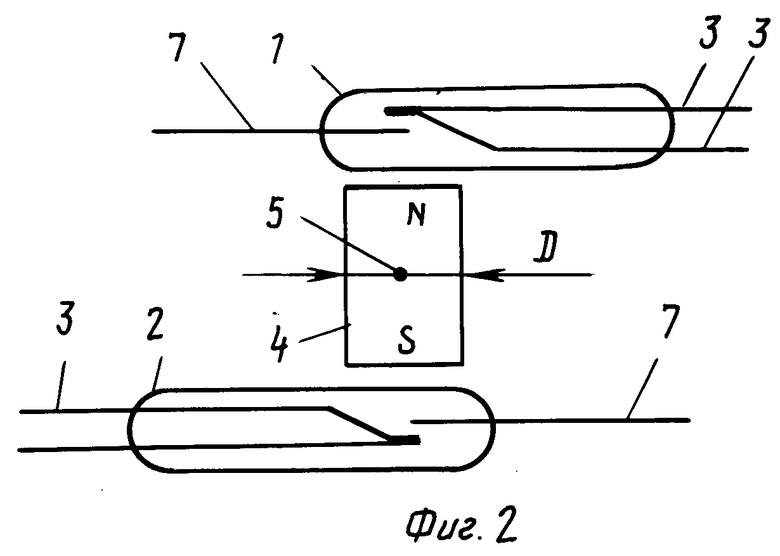
На фиг. 1 и 2 схематически показан герконовый датчик перемещения. На фиг. 1 вид спереди; на фиг. 2 вид сверху.
Герконовый датчик перемещения содержит основной переключающий геркон 1 и дополнительный переключающий геркон 2. Оба геркона имеют размыкаемые контакт-детали 3 выведенные на одну сторону баллона. Датчик также содержит стержневой постоянный магнит 4, намагниченный продольно, и установленный на штанге 5, которая вместе с постоянным магнитом 4 имеет возможность вращения вокруг оси 6 в плоскости, перпендикулярной оси намагничивания постоянного магнита 4. Герконы 1 и 2 установлены своими продольными осями параллельно друг другу и перпендикулярно оси намагничивания постоянного магнита 4, своими замыкаемыми контакт-деталями 7 в противоположные стороны по отношению к оси намагничивания постоянного магнита 4 таким образом, что перекрытие контакт-деталей основного геркона 1 расположено напротив одного полюса постоянного магнита 4 (например, N, как на фиг.2), а перекрытие контакт-деталей дополнительного геркона 2 расположенного напротив противоположного полюса постоянного магнита 4 (S, как на фиг. 2). Контролируемым перемещением постоянного магнита 4 является его вращательное движение на штанге 5 вокруг оси 6 в плоскости, проходящей через штангу 5 перпендикулярно оси намагничивания постоянного магнита 4. Размер D полюсов постоянного магнита в направлении его контролируемого перемещения (в случае цилиндрических полюсов это диаметр) определяется как:
D > 4 ˙R ˙ tg (A/2), где R длина штанги; А контролируемый угол срабатывания (угол поворота штанги от нейтрального положения, обеспечивающий срабатывание одного из герконов).
Работает датчик перемещения следующим образом. В исходном положении, изображенном на фиг. 1 и 2, постоянный магнит 4 расположен своими противоположными полюсами напротив перекрытий контакт-деталей герконов 1 и 2. В этом положении оба геркона отпущены (размыкаемые контакт-детали замкнуты). При повороте оси 6 на некоторый угол одновременно происходит поворот штанги 5 и перемещение постоянного магнита 4 вдоль герконов 1 и 2. Срабатывание геркона (1 или 2) произойдет когда постоянный магнит 4 сместится настолько, что перекрытие контакт-деталей окажется вблизи края полюса постоянного магнита. Причем следует иметь в виду, что при смещении постоянного магнита в сторону замыкаемой контакт-детали 7, расстояние, при котором происходит срабатывание, больше, чем аналогичное расстояние срабатывания при смещении постоянного магнита в сторону размыкаемых контакт-деталей 3 этого же геркона.
Регулировка угла срабатывания (угла поворота оси 6, при котором происходит срабатывание одного из герконов) осуществляется, например, смещением герконов вдоль своих продольных осей. Так, для уменьшения угла срабатывания необходимо основной геркон 1 сместить влево (см. фиг. 1,2), а дополнительный геркон 2 вправо. При таком расположении герконов отклонение постоянного магнита 4 вправо приведет к срабатыванию основного геркона 1, а отклонение постоянного магнита 4 влево приведет к срабатыванию дополнительного геркона 2.
Раздельная регулировка углов срабатывания вправо и влево позволяет изменять углы срабатывания в широких пределах от максимального угла А 2 ˙arctg (D/(4˙R) до минимального угла, определяемого дифференциалом хода постоянного магнита, причем углы срабатывания вправо и влево могут быть получены одинаковыми (даже при различных параметрах герконов), либо разными в указанных пределах.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГЕРКОНОВЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЯ | 1993 |
|
RU2032955C1 |
| Способ определения МДС срабатывания и МДС отпускания геркона | 1991 |
|
SU1787291A3 |
| Герконовое реле | 1988 |
|
SU1576926A1 |
| Коммутационное устройство | 1981 |
|
SU1032493A1 |
| Путевой переключатель | 1973 |
|
SU674112A1 |
| Переключатель | 1980 |
|
SU886094A1 |
| Способ управления гезаконом | 1988 |
|
SU1534533A1 |
| ПОЛЯРИЗОВАННЫЙ ГЕРКОН И ПОЛЯРИЗОВАННОЕ КОММУТАЦИОННОЕ УСТРОЙСТВО | 2011 |
|
RU2474000C1 |
| Переключатель | 1983 |
|
SU1152052A2 |
| ВЫКЛЮЧАТЕЛЬ КОНЦЕВОЙ ГЕРКОНОВЫЙ | 2005 |
|
RU2304820C2 |
Изобретение относится к электротехнике и может быть использовано в автоматике, в системах регулирования и управления для контроля перемещения объектов. Целью изобретения является расширение эксплуатационных возможностей. Герконовый датчик перемещения содержит два переключающих геркона с размыкаемыми контакт-деталями, выведенными на одну сторону баллона у каждого геркона, расположенные параллельно друг другу, постоянный магнит, намагниченный продольно и установленный между указанными герконами перпендикулярно их продольным осям на вращающейся штарге, а размер полюсов постоянного магнита в направлении его контролируемого перемещения определяется как: D>4 R tg (А/2), где D - размер полюсов постоянного магнита; R - длина штанги; А - контролируемый угол срабатывания. 2 ил.
ГЕРКОНОВЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЯ, содержащий геркон и стержневой постоянный магнит, намагниченный продольно и установленный перпендикулярно продольной оси геркона одним полюсом к области перекрытия контакт-деталей геркона с возможностью контролируемого перемещения вдоль продольной оси геркона, отличающийся тем, что в качестве геркона выбран переключающий геркон с размыкающими контакт-деталями, выведенными на одну сторону торца баллона геркона, датчик снабжен штангой и дополнительным герконом, аналогичным основному, штанга установлена на оси вращения и прикреплена к постоянному магниту перпендикулярно его оси намагничивания, дополнительный геркон расположен так что его продольная ось параллельна продольной оси основного геркона и перпендикулярна оси намагниченности постоянного магнита, причем оба геркона установлены так по отношению друг к другу, что их замыкающие контакт-детали расположены в противоположных торцах, постоянный магнит установлен так, что области перекрытия контакт-деталей герконов расположены напротив его противоположных полюсов, а указанная ось вращения параллельна оси намагничивания постоянного магнита, причем размер D полюсов постоянного магнита в направлении его контролируемого перемещения определяется как
D > 4 · R · tg (A/2),
где D размер полюсов постоянного магнита в направлении контролируемого перемещения;
R длина штанги;
A контролируемый угол срабатывания.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Коробков Ю.С., Флора В.Д | |||
| Электромеханические аппараты автоматики | |||
| М.: Энергоатомиздат, 1991, с.162, рис.3.32д. | |||
