Изобретение относится к электротехнике и может быть использовано для позиционирования устройств, например в фотошаблонах для изготовления микросхем.
Известен линейный электродвигатель (патент США N 3787716, кл. Н 02 К 41/02, 1972), содержащий статор, включающий один или два линейных ряда установленных на одинаковом расстоянии между собой магнитов, и якорь, отрегулированный для перемещения вдоль статора и содержащий один или два комплекта из шести способных намагничиваться катушек, взаимодействующих с полями потоков между магнитами и якорем. Для обеспечения последовательности намагничивания катушек и регулирования электрического тока, проходящего в катушке, предусмотрено автоматическое регулирование.
Недостатком являются большие габариты электродвигателя.
Известно также двухкоординатное позиционирующее устройство (патент США N 4555650, кл. G 05 B 1/06, 1983), содержащее магнитную группу, образованную из множества постоянных магнитов, расположенных в плоскости во взаимно перпендикулярных направлениях, и группу катушек, образованную двумя комплектами катушек для образования тяговых усилий в двух направлениях. Каждый комплект катушек содержит по меньшей мере три катушки, боковые стороны которых расположены на расстоянии, равном половине расстояния между центрами магнитов. При этом катушки каждого комплекта расположены на расстоянии одна от другой, равном расстоянию между магнитами в соответствующем направлении, так что в нейтральном положении каждая из катушек находится напротив магнита. Известное устройство дополнительно снабжено детекторным устройством для регистрации положения якоря, при этом генератор сигналов распределения тока представляет собой электронное счетно-решающее устройство (электронную вычислительную машину).
Известен линейный двигатель (патент США N 4485339, кл. G 05 B 1/06, 1983), содержащий две секции, установленные с возможностью взаимного перемещения вдоль оси двигателя. Первая секция содержит основание катушки, на котором расположена система катушек, витки которых ориентированы перпендикулярно оси двигателя, а вторая секция содержит основание магнита, на котором расположена по меньшей мере одна пара магнитов, намагниченных противоположно, расположенных вдоль оси двигателя на некотором расстоянии относительно друг друга и выполненных с возможностью взаимодействия с системой катушек через воздушный зазор. Линейный электродвигатель также содержит устройство определения и управления взаимного положения двух секций двигателя и управления направлением и силой тока в катушках в зависимости от взаимного положения двух секций двигателя для того, чтобы перемещать его вдоль его оси.
Такой линейный двигатель может осуществлять лишь небольшое перемещение по отношению к размерам двигателя, в частности размеру, если смотреть вдоль оси катушки, который требует сравнительно крупной и тяжелой конструкции позиционирующего устройства для заданного перемещения. Кроме того, в процессе работы сравнительно большие возбужденные части катушек не вносят эффективный вклад в образование тягового усилия, что вызывает необязательное рассеяние мощности.
Целью изобретения является уменьшение габаритов двигателя при сравнительно большом перемещении.
Цель достигается тем, что система катушек первой секции двигателя содержит комплект из трех катушек, установленных в ряд вдоль оси двигателя: два периферийных и одну центральную. Причем центральная катушка имеет длину, практически равную расстоянию между парой магнитов второй секции двигателя. При нейтральном положении секций двигателя относительно друг друга центральная катушка расположена, по меньшей мере, практически полностью напротив зазора между магнитами. При этом устройство определения и управления снабжено управляющим средством для обеспечения направления тока в витках одной периферийной катушки, противоположного направлению тока в витках другой периферийной катушки, и для обеспечения направления тока в витках центральной катушки при нахождении частично напротив одного из магнитов, которое одинаково с направлением тока в витках периферийной катушки, обращенной к соответствующему магниту.
При определенном возбуждении катушек линейного двигателя они могут очень эффективно создавать тяговую силу, позволяя получить большое перемещение секций двигателя относительно друг друга. При этом геометрический размер двигателя, по меньшей мере, вдоль оси двигателя может быть небольшим по отношению к необходимому перемещению в том же направлении. Дополнительное преимущество заключается в том, что паразитное рассеяние мощности сведено к минимуму, что уменьшает нагрев двигателя.
Известно позиционирующее устройство (патент США N 4485339, кл. G 05 B 1/06, 1983), содержащее раму, позиционирующий стол и линейные двигатели, причем опора катушки линейных двигателей закреплена на раме, а опора магнита линейных двигателей закреплена на позиционирующем столе, при этом рама выполнена в виде направляющей потока.
Второй целью изобретения является получение позиционирующего устройства меньших геометрических размеров, способного перемещать предмет на то же самое расстояние и с, по меньшей мере, той же самой точностью, что и известное позиционирующее устройство.
Для достижения цели позиционирующее устройство содержит четыре линейных двигателя, установленных попарно так, что оси одной пары двигателей ориентированы перпендикулярно осям двигателей другой пары.
Такое позиционирующее устройство обеспечивает приводные силы на позиционирующий стол в двух взаимно перпендикулярных направлениях (х,у), вдоль которых может перемещаться указанный стол. Кроме того, для вращения позициониpующего стола вокруг оси вращения, имеющей третье координатное измерение (Z), катушки могут приводиться в движение в зависимости от мгновенной нагрузки на них, позволяющей наиболее эффективно использовать отдельные двигатели.
Позиционирующее устройство имеет небольшие размеры за счет свойств используемого в нем линейного двигателя, что позволяет сводить к минимуму его массу и инерцию, что повышает как тяговое усилие, так и расширяет полосу пропускания системы управления им.
Смежные магниты двух двигателей, расположенных перпендикулярно друг другу, намагничены в одинаковых направлениях. Это сводит к минимуму перекрытие магнитных цепей различных двигателей, что предотвращает их нежелательное взаи- модействие.
На фиг. 1-6 изображен линейный двигатель в различных положениях; на фиг. 7 показано позиционирующее устройство, в аксонометрии; на фиг. 8 то же позиционирующее устройство, вид сверху; на фиг, 9 дан разрез А-А на фиг. 8; на фиг. 10 показано позиционирующее устройство, вид сбоку; на фиг. 11 представлена схема системы регулирования линейного двигателя.
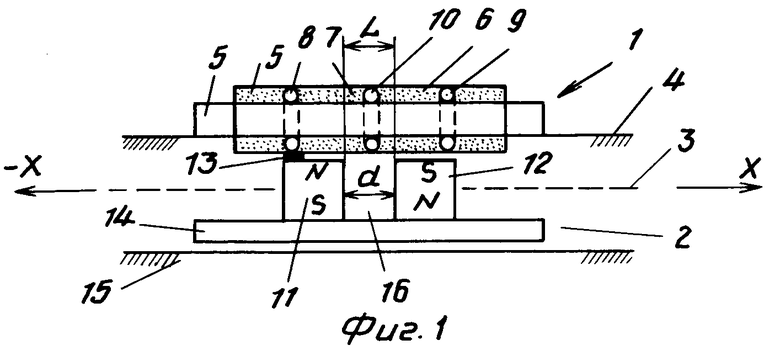
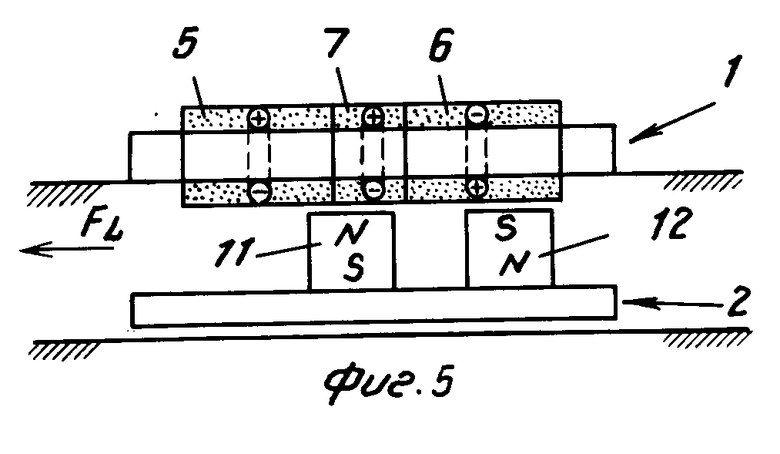
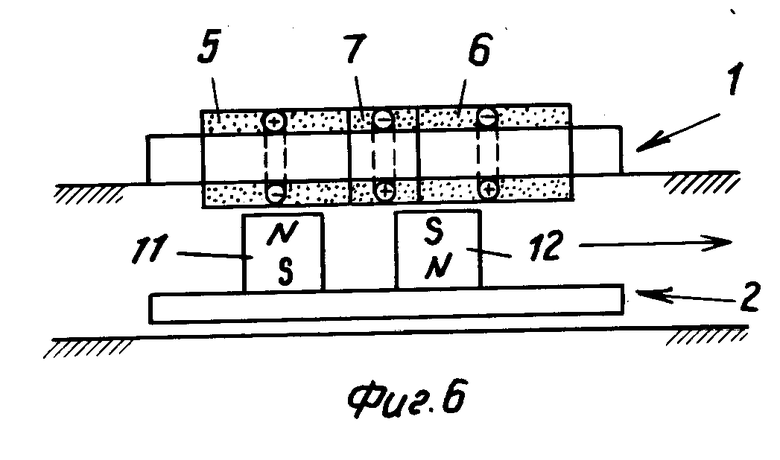
Линейный двигатель (фиг. 1-6) содержит неподвижную секцию 1 и подвижную секцию 2, которая может перемещаться вдоль продольной оси 3 двигателя. Неподвижная секция 1 двигателя содержит основание 4 катушки из слабого магнита, на котором установлены две периферийные катушки 5 и 6 и центральная катушка 7, расположенная между ними. Катушки 5, 6, 7 содержат витки 8, 9, 10, соответственно расположенные в плоскостях, которые ориентированы, по меньшей мере, практически перпендикулярно продольной оси 3 двигателя. В зависимости от их направлений намотки по отношению одна к другой периферийные катушки 5 и 6 могут быть электрически соединены между собой последовательно или в виде последовательной противофазы.
Подвижная секция 2 двигателя содержит два противоположно намагниченных постоянных магнита 11 и 12, магнитные полюса N и S каждого из которых соответственно обращены в сторону неподвижной секции 1 двигателя с целью взаимодействия с катушками 5, 6 и 7 через воздушный зазор 13. Магниты 11 и 12 прикреплены к основанию 14, которое выполнено, например, в виде стола или каретки и опирается на магнитопроводящее основание 15, например, посредством неподвижного газового подшипника.
Длина L центральной катушки 7 соответствует расстоянию между магнитами 11 и 12. В положении на фиг. 1 электрический ток не проходит через витки 8, 9 и 10, секция 2 двигателя занимает нейтральное положение, при котором центральная катушка 7 расположена строго против промежутка 16 между магнитами 11 и 12. Из этого положения подвижная секция 2 двигателя может быть передвинута относительно неподвижной секции 1 двигателя в направлении Х или в направлении -Х.
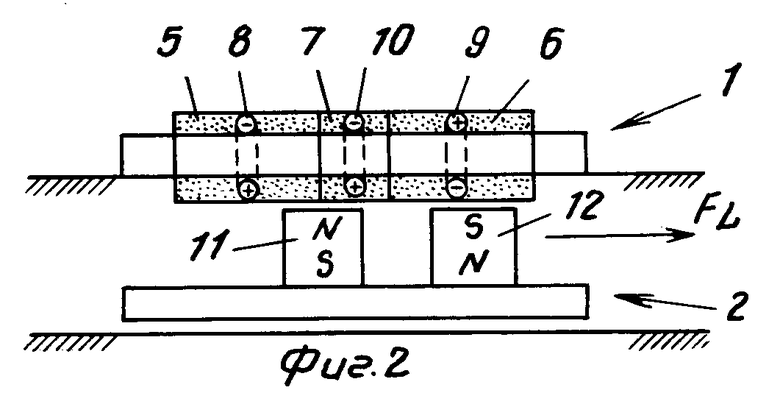
В положении на фиг. 2 на подвижную секцию 2 двигателя действует тяговая сила FL в направлении Х и подвижная секция 2 двигателя совершает движение относительно нейтрального положения в направлении Х. Периферийные катушки 5 и 6 после этого возбуждают таким образом, что направление электрического тока в витках 8 противоположно направлению электрического тока в витках 9. В этом положении центральную катушку 7 возбуждают таким путем, что направление электрического тока в витках 10 является одинаковым с направлением электрического тока в витках 8, что позволяет получить большее перемещение в направлении Х, а следовательно, большее максимальное перемещение. На фигурах направления электрического тока в витках 8, 9, и 10 обозначается знаками + и -. Электрический ток через три катушки может быть одинаков по абсолютной величине.
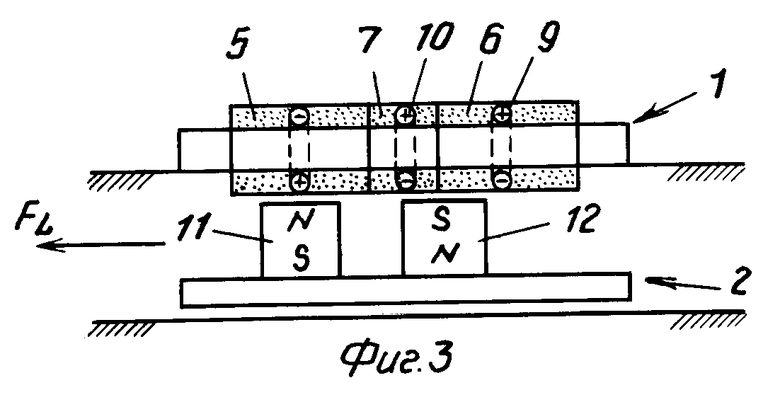
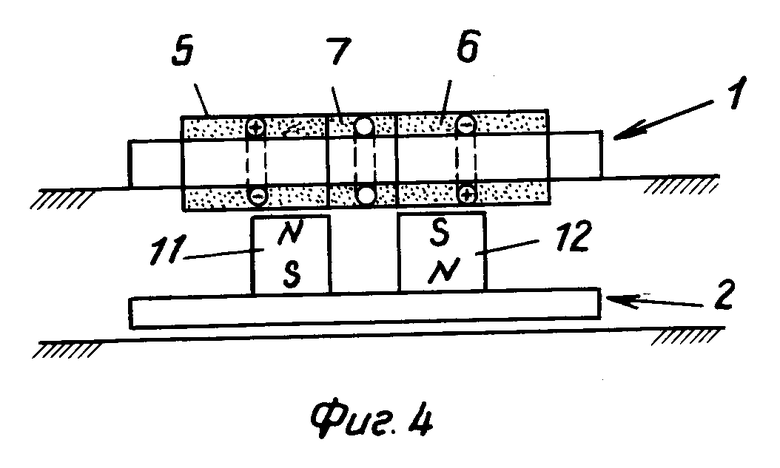
Для создания тяговой силы FL в направлении -Х, начинающемся из положения, достигнутого в результате возбуждения в соответствии с фиг. 1-6, направление электрического тока в катушках 5 и 6 и его направление в центральной катушке 7 одновременно реверсируют путем коммутации, приводя к направлениям электрического тока, приведенным на фиг. 5. Это возбуждение позволяет получить нейтральное положение, изображенное на фиг. 4. По достижении нейтрального положения центральная катушка 7 может быть обесточена.
Если необходимо, чтобы тяговая сила FL в направлении -Х начиналась из нейтрального положения, показанного на фиг. 4, то периферийные катушки 5 и 6 возбуждают одновременно, как это указано на фиг. 3, и как только подвижная секция 2 двигателя будет приведена в движение, центральная катушка 7 возбуждается, причем направление электрического тока в витках 10 одинаково с его направлением в витках 9. При практическом воплощении катушки 5, 6 и 7 в этом положении подвергаются возбуждению одновременно.
Для того, чтобы переместить подвижную секцию 2 двигателя в направлении Х, начиная из положения, достигнутого за счет возбуждения в соответствии с фиг. 3, катушки 5, 6 и 7 приводятся в возбуждение одновременно таким путем, как это показано на фиг. 6.
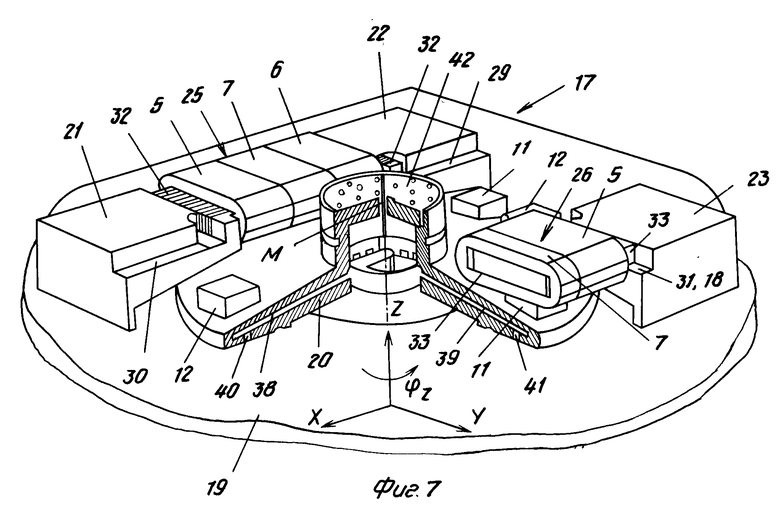
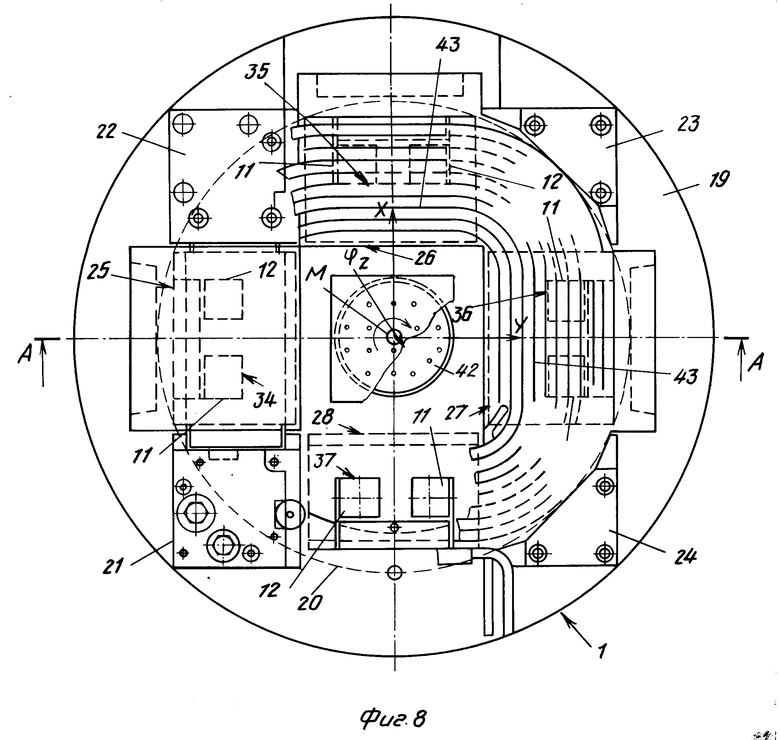
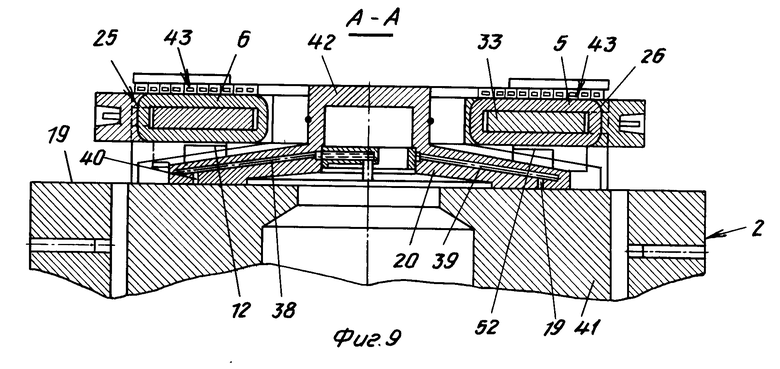
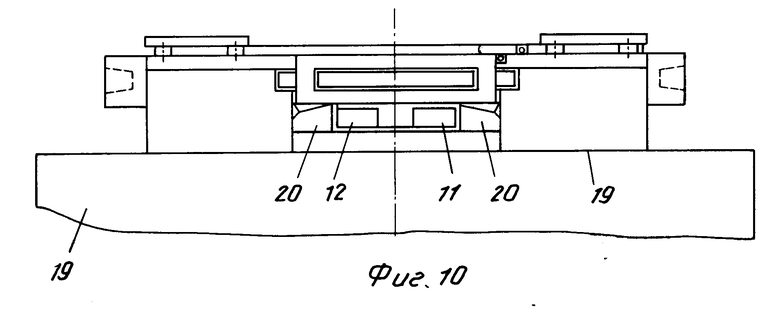
Позиционирующее устройство 17 (фиг. 7-10), содержит раму 18, включающую горизонтально расположенное плоское основание 19 из магнитопроводящего материала, например железо-кобальтового сплава, над которым выполнен круглый купол 20. При работе купол 20 опирается на основание 19 при помощи аэростатической опоры. Как видно, в частности, из фиг. 7 и 8, на основании 19 установлены четыре угловые опоры 21-24. Эти угловые опоры обpазованы несущими поверхностями для четырех систем катушек 25 и половины системы катушек 26, на фиг. 8 иллюстрируются системы катушек 25-28. Системы катушек 25-28 опираются на упомянутые несущие поверхности через (пластинчатые) каркасы катушек или основания катушек. Из несущих поверхностей на фиг. 7 видимы лишь несущие поверхности 29 и 30 систем катушек 27 и 28 и несущая поверхность 31 системы катушек 26. Из оснований катушек на фиг. 7 видны лишь два основания 32 и 33 катушек системы катушек 25 и 26 соответственно. Основание 32 опирается на несущие поверхности 29 и 30, основание 33 на несущую поверхность 31. Каждая из систем катушек 25-28 содержит две периферийные катушки 5 и 6 и одну центральную катушку 7. На фиг. 7 видны катушки 5-7 системы катушек 25 и лишь одна периферийная катушка 5 и половина центральной катушки 7 системы катушек 26. Магнитное устройство, прикрепленное к куполу 20, расположено ниже каждой системы катушек, направленных навстречу друг другу, и совместно с соответствующей системой катушек образует электрический линейный двигатель, предназначенный для перемещений в направлениях Х и У в соответствии с ортогональной системой координат, как изображено на фиг. 7.
Магнитные устройства 34-37 (фиг. 8) расположены напротив систем катушек 25-28 соответственно в воздушном куполе 20, выполняющем функцию основания магнита. В каждом из магнитных устройств 34-37 содержатся два постоянных магнита 11 и 12, которые противоположно намагничены в направлениях, перпендикулярных оси Z системы координат. Магниты расположены так по отношению друг другу, что пары, включающие магниты 11 и 12, имеют противоположные направления намагничивания. Из числа пар постоянных магнитов 11 и 12 на фиг. 7 показаны магнит 12, расположенный против катушечного устройства 34, магниты 11 и 12 напротив катушечного устройства 35 и магнит 12 напротив катушечного устройства 36. Магнитная цепь каждого из описанных линейных двигателей, чья работа идентична работе двигателя, описанного со ссылкой на фиг. 1-6, образована железо-кобальтовым сплавом между магнитами пары, постоянными магнитами и каркасами катушечных устройств. Ширина воздушного промежутка в магнитной цепи между катушечными устройствами и постоянными магнитами определяется шириной воздушного промежутка между основанием 19 и воздушным куполом 20 в аэростатической опорной поверхности. Поскольку магнитная цепь короткого замыкания между постоянными магнитами магнитного устройства образуется через основание 19, аэростатическая опорная поверхность магнита смещена.
Воздушный купол образован радиальными каналами, необходимыми для упомянутой опорной поверхности. На фиг. 7 и 9 показаны каналы 38 и 39. Воздух в аэростатической опорной поверхности достигает мест, где область высокого давления должна быть образована посредством поперечных каналов 40 и 41, которые сообщаются с каналами 38 и 39 и открыты в сторону воздушного промежутка между куполом 20 и основанием 19. Смещение аэростатической опорной поверхности также зависит от веса купола 20. Центральная часть купола может вызвать дополнительное смещение при помощи вакуума. Центральная часть купола, образованная цилиндром 42, должна быть изолирована от периферийной части купола 20, где расположена опорная поверхность. Цилиндр 42 образует стол позиционирующего устройства. Кроме того, каналы 38 и 39 соединены с источником воздуха посредством цилиндра 42.
На сторонах, которые удалены от магнитных устройств, системы катушек 25-28 находятся в тепловом контакте с охладителем 43, общим для всех систем катушек.
Возбуждение систем катушек 25 и 27 линейных электрических двигателей с идентичными токами таким путем, как это описано со ссылками на фиг. 1-6, для того, чтобы переместить купол 20 параллельно оси Х, приводит к чистому перемещению. Для оси Y это можно обеспечить аналогично. При нейтральном положении цилиндра 42, при котором подвижная секция каждого линейного двигателя занимает свое нейтральное положение по отношению к неподвижной, неперемещаемой секции, центр М цилиндра расположен на оси Z системы координат. Вращение цилиндра 42 вокруг оси Z без перемещений центра М можно обеспечить либо путем противоположного возбуждения двух линейных электрических двигателей для направления Х с помощью токов равной величины, либо путем приведения в действие линейных двигателей для направления Y аналогичным способом. Также возможно привести в действие все линейные двигатели с целью достижения вращения Z. Перемещения и вращения центра М можно осуществлять одновременно.
Позиционирующее устройство пригодно для изготовления фотошаблонов, предназначенных для изготовления интегральных схем. В процессе производства фотошаблоны подвергают одному или более обножениям в соответствии с очень точным изображением. В последующем фотошаблоны используют в оптическом микролитографическом устройстве для экспонирования полупроводниковых пластин (плат). В таком оптическом микролитографическом устройстве (установка фотолитографии с последовательным шаговым экспонированием) можно также использовать позиционирующее устройство. Возможны и другие пути использования.
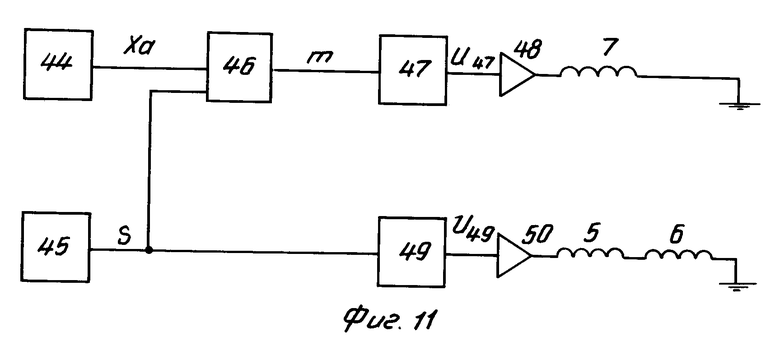
Система управления, используемая в линейном двигателе, описана со ссылкой на фиг. 11. Сигнал ха из детекторного блока 44, содержащего один или более позиционных преобразователей, и контрольный сигнал s из цифрового процессора 45 обработки сигналов поступают поступают к цифровому модулю 46 коммутации. Сигнал ха обеспечивает информацию о фактическом или мгновенном положении движущейся секции двигателя относительно ее нейтрального положения (х=0). Из модуля 46, в котором коммутируется сигнал в зависимости от сигнала ха, сигнал М поступает в цифроаналоговый преобразователь 47, который подает выходное напряжение V47 на управляемый напряжением усилитель 48 тока для возбуждения центральной катушки 7. Контрольный сигнал s от процессора 45 также поступает к цифроаналоговому преобразователю 49, который подает выходное напряжение V49. Выход цифроаналогового преобразователя 49 электрически соединен с вводом управляемого напряжением усилителя 50 тока для возбуждения катушек 5 и 6.
Изобретение не ограничено продемонстрированными вариантами. Например, для уменьшения мощности рассеяния в двигателе можно заменить каждую из периферийных катушек парой из отдельно возбуждаемых видоизмененных катушек, одна из которых из пары модифицированных катушек, если смотреть вдоль оси двигателя, имеет длину, соответствующую половине перемещения двигателя. Модифицированные периферийные катушки возбуждают избирательно в зависимости от их положения относительно магнитов.
Использование: в фотошаблонах при использовании интегральных плат. Сущность изобретения: линейный двигатель состоит из двух секций, которые могут перемещаться одна относительно другой вдоль оси двигателя. Первая секция содержит основание катушки, на котором размещается система из катушек, а вторая секция содержит основание магнита, на котором размещается по меньшей мере одна пара магнитов, которые, по меньшей мере, если смотреть вдоль оси двигателя, расположены на некотором расстоянии друг от друга с образованием зазора и выполнены с возможностью взаимодействия с системой катушек через воздушный зазор. Система катушек первой секции двигателя содержит комплект из трех катушек, установленных последовательно вдоль оси двигателя, а именно двух периферийных катушек и одной центральной катушки. Центральная катушка имеет длину, по меньшей мере, равную расстоянию между парой магнитов второй секции двигателя, причем центральная катушка расположена напротив зазора между магнитами при нейтральном положении секций двигателя одной относительно другой. 2 с. и 1 з.п. ф-лы, 11 ил.
| Патент США N 4485339, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
