Изобретение относится к горной технике и может быть использовано при проходке горных выработок.
Известны горные машины, погрузочный орган которых снабжен нагребающими лапами, изменяющими во время работы свою длину с помощью механизма перемещения, например, в виде силового цилиндра [1]
Недостатком таких горных машин является наличие сложного вращательного привода в виде зубчатых передач и кривошипа "Округлое" движение носка нагребающей лапы и, следовательно, нечеткая "внедряющаяся" траектория, сложность управления и связанное с этим отсутствие надежности работы конструкции.
Известны также горные машины, рабочий орган которых включает приемный стол с конвейером, нагребающие лапы, связанные с механизмом перемещения лап вправо-влево и механизм управления рабочим органом [2]
Недостатком этой конструкции является плохая погрузочная способность из-за движения только вправо-влево, такие нагребающие лапы могут как бы разваливать вправо и влево от себя горную массу, т.е. при движении к центру погрузочного органа подгребать, а при обратном движении отгребать горную массу от центра погрузочного органа, и нужно иметь как бы стенку, упираясь в которую, горная масса должна перевалиться через лапу, чтобы при следующем движении быть перемещенной в нужном направлении, что непроизводительно и, следовательно, нерационально из-за лишней затраты энергии.
Целью изобретения является увеличение погрузочной способности устройства за счет четкого и внедряющегося в штабель горной массы движения нагребающих лап по прямой линии и их траектории, позволяющей подгребать погружаемую горную массу только к центру погрузочного органа (к конвейеру).
Цель достигается тем, что каждая нагребающая выполнена в виде телескопического устройства, состоящего из подвижной и неподвижной частей, связанных между собой механизмом относительного их перемещения вперед-назад, при этом механизмы перемещения лап вправо-влево и вперед-назад соединены между собой посредством подвижной связи и через реле времени связаны с механизмом управления так, что их движение смещено по времени, а нагребающие лапы и конвейер независимы друг от друга.
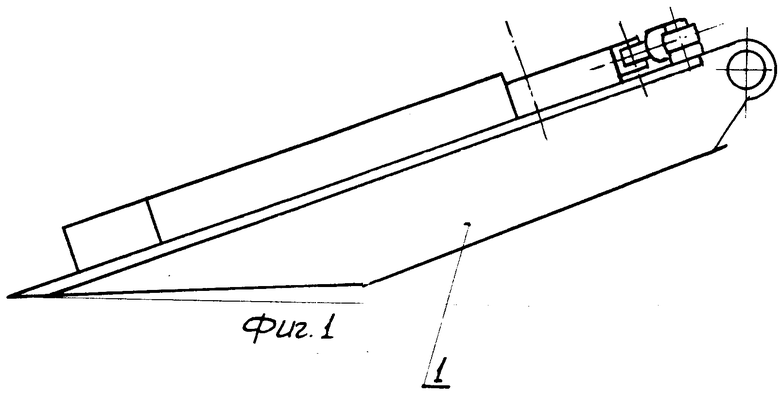
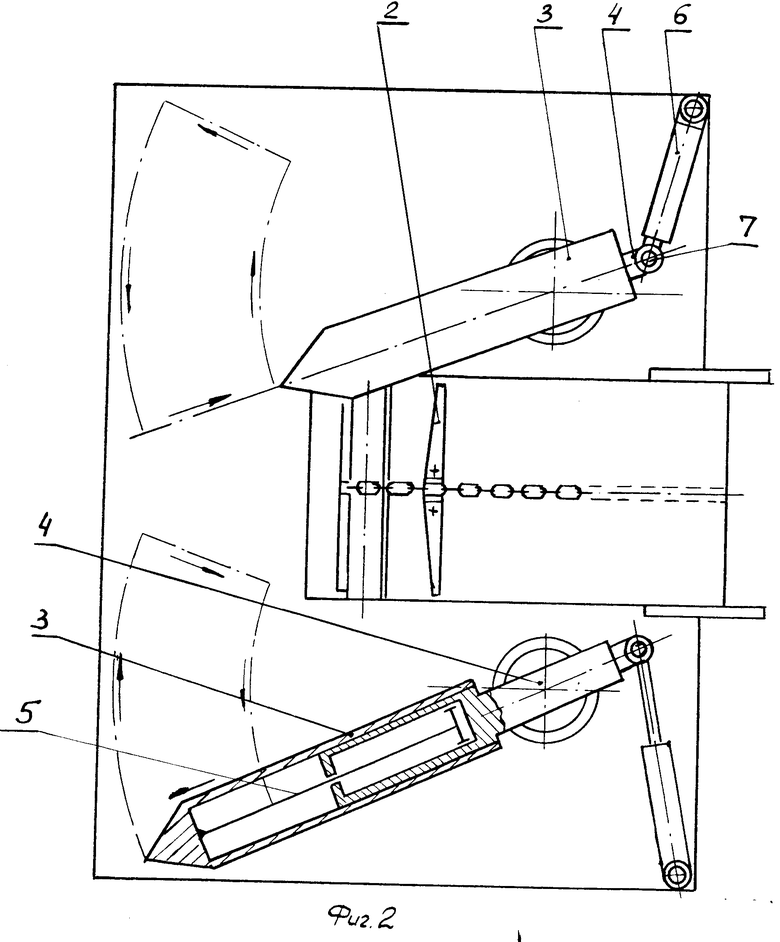
На фиг. 1 изображен погрузочный орган, вид сбоку; на фиг.2 то же, вид сверху; на фиг.3 схема управления.
Погрузочный орган горной машины включает приемный стол 1 с конвейером 2, нагребающие лапы, выполненные в виде телескопического устройства, состоящего из подвижной 3 и неподвижной 4 частей, связанных между собой механизмом 5 относительного их перемещения вперед-назад, например силовым цилиндром, а механизмы 6 перемещения лап вправо-влево, а также вперед-назад соединены между собой посредством подвижной связи 7, например в виде шарнира.
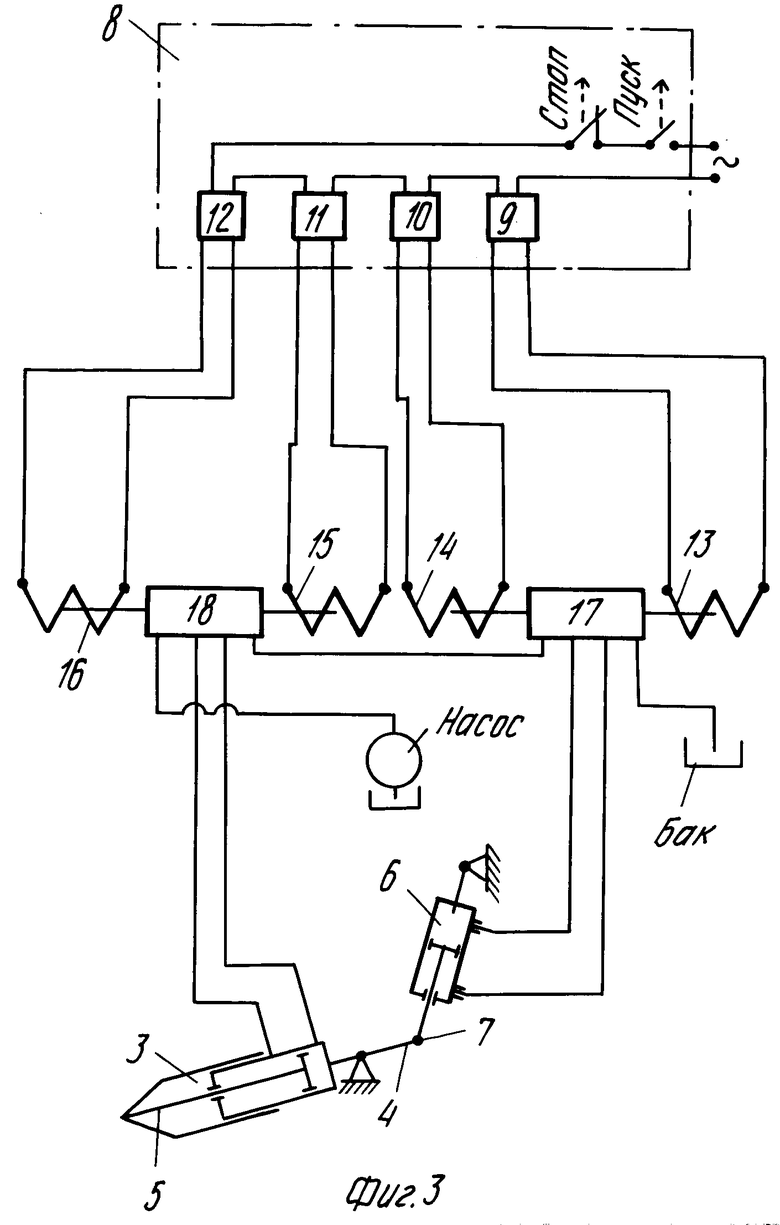
Управление погрузочным органом осуществляется с пульта 8 управления, имеющего реле 9,10,11,12 времени, через которые механизмы 5 и 6 перемещения лап связаны с пультом 8 управления так, что их движения смещены по времени друг относительно друга, а нагребающие лапы и конвейер независимы друг от друга.
В качестве одного из вариантов на фиг.3 представлена схема управления, включающая также соленоиды 13,14,15,16, которые через реле 9,10,11,12 времени управляют золотниками (распределителями) 17 и 18, подающими рабочую жидкость от насоса к механизмам перемещения 5 и 6.
Работает в одном из возможных вариантов исполнения погрузочный орган следующим образом.
При включении с пульта 8 управления, например, кнопкой "Пуск" управляющий импульс подает энергию через реле 9 времени на соленоид 13, переключающий золотник 17, и жидкость от насоса поступает в механизм 6 перемещения нагребающей лапы влево в течение времени настройки реле времени. Отработав, реле 9 времени включает реле 11 времени, которое через свой соленоид 15 переключает золотник 18, в результате чего происходит выдвижение части 3 лапы вперед, во время которого происходит внедрение лапы в штабель погружаемой горной массы до срабатывания реле 11 времени, которое включает реле 10 и, следовательно, золотник 17 для перемещения лапы вправо, во время которого происходит перемещение горной массы вправо или к центру погрузочного органа (к конвейеру). После отработки реле 10 времени включается реле 12 времени и, следовательно, соленоид 16 и золотник 18, благодаря чему лапа совершает движение назад, во время которого лапа как бы уходит от той порции горной массы, которую она переместила в предыдущем движении, т.е. начинается холостой ход. После того, как отработает реле 12 времени, вновь включается реле 9 времени и цикл начинается сначала.
Вторая нагребающая лапа на погрузочном органе может работать одновременно с первой и подключена к источнику энергии параллельно ей, может быть включена со смещением цикла или от отдельно установленного комплекта реле.
При этом включение в работу нагребающих лап и конвейера не зависит друг от друга.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОХОДЧЕСКИЙ АГРЕГАТ | 1993 |
|
RU2046190C1 |
| ЛЕНТОЧНЫЙ ПЕРЕГРУЖАТЕЛЬ | 1991 |
|
RU2013563C1 |
| УСТРОЙСТВО ДЛЯ ПОДВОДА ОРОШАЮЩЕЙ ЖИДКОСТИ К КОРОНКЕ ИСПОЛНИТЕЛЬНОГО ОРГАНА ГОРНОГО КОМБАЙНА | 1993 |
|
RU2054543C1 |
| АГРЕГАТ ДЛЯ БУРОШНЕКОВОЙ ВЫЕМКИ УГЛЯ | 1990 |
|
RU2011815C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕПЛОВЫХ ПОТЕРЬ МАШИН И УСТРОЙСТВ | 1992 |
|
RU2102711C1 |
| БЕТОНОВОЗ-СМЕСИТЕЛЬ | 1994 |
|
RU2078699C1 |
| БУРОВОЙ ИНСТРУМЕНТ ДЛЯ ВРАЩАТЕЛЬНОГО БУРЕНИЯ СКВАЖИН | 1994 |
|
RU2065021C1 |
| БЕТОНОВОЗ-СМЕСИТЕЛЬ | 1992 |
|
RU2036091C1 |
| БУНКЕР БЕТОНОНАСОСА | 1993 |
|
RU2040660C1 |
| Погрузочный орган горной машины | 1973 |
|
SU456083A1 |
Изобретение относится к горному делу и может быть использовано при проходке горных выработок. Погрузочный орган горной машины включает стол с конвейером, нагребающие лапы, выполненные в виде телескопического устройства, которое состоит из подвижной и неподвижной частей. Подвижная и неподвижная части связаны между собой механизмом относительного перемещения вперед-назад и соединены с механизмом перемещения вправо-влево посредством подвижной связи, в качестве которой может быть шарнир. Управление погрузочным органом осуществляется с пульта управления, имеющим реле времени, через которые механизмы перемещения лап связаны с пульта управления так, что их движения смещены по времени друг относительно друга. Нагребающие лапы и конвейер независимы друг от друга. 3 ил.
ПОГРУЗОЧНЫЙ ОРГАН ГОРНОЙ МАШИНЫ, включающий приемный стол с конвейером, нагребающие лапы, связанные с механизмом перемещения лап вправо-влево, и механизм управления погрузочным органом, отличающийся тем, что каждая нагребающая лапа выполнена в виде телескопического механизма, состоящего из неподвижной и подвижной частей, связанных между собой посредством механизма относительного их перемещения вперед-назад, при этом механизмы перемещения лап вправо-влево и вперед-назад соединены между собой посредством подвижной связи, и посредством реле времени связаны с механизмом управления с возможностью обеспечения движений, смещенных по времени, а нагребающие лапы и конвейер выполнены независимыми друг от друга.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Рабочи орган погрузочной машины | 1989 |
|
SU1686187A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
