Изобретение относится к радиолокации, в частности к основам построения и конструкции маловысотных РЛС, и может быть использовано, например, в наземных маловысотных радиолокационных высотомерах и трехкоординатных РЛС для подавления обратных помеховых отражений зондирующих сигналов от земли и измерения угла места маловысотных малоскоростных воздушных целей в области этих отражений.
Известен способ определения направления прихода электромагнитных колебаний на основе разности фаз между двумя пространственно разнесенными антеннами и устройство для его реализации, которое в случае измерения угла места целей состоит из двух разнесенных по высоте антенн [1] Измеряют сдвиг фаз эхо-сигналов, принимаемых этими антеннами, и по нему определяют угол места (или высоту) цели.
Однако такое устройство не защищено от обратных помеховых отражений зондирующих сигналов земной поверхностью и практически не может измерять угол места малоскоростных целей в области этих отражений.
Кроме того, данное устройство почти не может измерять угол места маловысотных целей из-за вредного влияния радиоволн, отраженных от земли в зеркальном направлении.
Известны способ и устройство подавления пассивных помех в допплеровском радиолокаторе, содержащее передатчик и приемник эхо-сигналов [2] Из принятых сигналов формируются сигналы, содержащие допплеровские частотные компоненты, которые подаются на устройство обработки сигналов, содержащее допплеровский процессор. Последний осуществляет избирательную частотную фильтрацию сигналов, а также формирует по крайней мере один отфильтрованный сигнал, который сравнивается с принятым сигналом в устройстве амплитудного сравнения. В результате сравнения последнее устройство вырабатывает выходные сигналы первого или второго уровня. Сигнал первого уровня вырабатывается в тех случаях, когда отношение интенсивностей сравниваемых сигналов лежит в пределах заданного диапазона величин. Сигнал второго уровня вырабатывается, когда указанное соотношение лежит вне заданного диапазона. Выходной сигнал из устройства амплитудного сравнения подается в стробирующее устройство, через которое избирательно пропускается второй сигнал радиолокатора с подавленными отражениями от пассивных помех. Сигнал проходит через стробирующее устройство только в том случае, когда отношение прошедшего через фильтр сигнала к принятому сигналу превышает заданный уровень.
Однако это устройство не может обнаруживать маловысотные малоскоростные и неподвижные воздушные цели на фоне обратных помеховых отражений зондирующих сигналов передатчика от земной поверхности. Эхо-сигналы таких целей почти не имеют допплеровского смещения частоты и не будут селектированы допплеровским процессором этого устройства. В результате эхо-сигнал цели не пройдет через стробирующее устройство и цель не будет обнаружена.
Наиболее близкой к изобретению является радиолокационная система сопровождения целей, находящихся на малых углах места, принимающая эхо-сигналы маловысотных целей двумя направленными антенными диаграммами специальной формы [3] При приеме определяется отношение сигналов, принятых указанной парой диаграмм направленности. Это отношение характеризует угол места цели. Для определения последнего в прототипе не требуется сканировать диаграммы направленности антенн в вертикальной плоскости. В состав устройства-прототипа входят антенная система в виде решетки из разнесенных по высоте излучающих элементов и диаграммообразующая схема, формирующая две диаграммы направленности специальной формы, связанные с двумя приемными каналами, на выходе которых установлены два умножителя, делитель напряжения и электрическая цепь с коэффициентом передачи, равным квадратному корню из входного напряжения. В состав прототипа входит также импульсный передатчик с передающей антенной, излучающей зондирующие сигналы в секторе малых углов места.
Приемная антенная система прототипа формирует две диаграммы направленности специальной формы таким образом, что отношение этих диаграмм четно-симметрично относительно горизонтальной оси антенны, в частности прямо пропорционально квадрату угла места. Это позволяет измерять угол места маловысотной цели без сканирования диаграммы направленности антенны в вертикальной плоскости путем определения отношения сигналов принятых указанной парой диаграммы направленности. При этом напряжение на выходе устройства-прототипа прямо пропорционально углу места маловысотной цели.
Однако данная радиолокационная система не защищена от обратных помеховых отражений зондирующих сигналов передатчика земной поверхностью и не может измерять угол места маловысотных малоскоростных целей в области этих отражений.
Задачей изобретения является подавление обратных помеховых отражений зондирующих сигналов от земной поверхности и обеспечение возможности измерения углов места маловысотных малоскоростных воздушных целей в области этих отражений.
Для этого в устройстве для измерения угла места, содержащем импульсный передатчик с передающей антенной, двухканальный приемник и приемную антенную систему, приемная антенная система выполнена из четырех разнесенных по высоте одинаковых горизонтально направленных симметричных излучающих элементов таким образом, чтобы сумма высот над землей верхнего и второго снизу излучающих элементов не превышала вертикального размера апертуры передающей антенны, приемные излучающие элементы связаны с высокочастотными устройствами вычитания верхнего и нижнего приемных каналов, верхний и третий снизу элементы непосредственно, а второй снизу и нижний элементы через управляемые фазовращатели, периодически изменяющие фазу принимаемых сигналов синхронно с зондирующими импульсами передатчика, выходы видеосигналов верхнего и нижнего приемных каналов связаны с вычислителем, который определяет угол места θ маловысотной цели путем решения на интервале угломестного рабочего сектора устройства следующего трансцендентного уравнения
 , (1) где Uв, Uн напряжения видеосигналов на выходах верхнего и нижнего приемных каналов;
, (1) где Uв, Uн напряжения видеосигналов на выходах верхнего и нижнего приемных каналов;
k 2π/λ- волновое число;
λ- длина волны;
h1, h2, h3, h4 высоты над землей излучающих элементов приемной антенной системы (снизу вверх);
Δϕв, Δϕн сдвиги фаз, на которые управляемые фазовращатели верхнего и нижнего приемных каналов изменяют фазы принимаемых сигналов, равные
Δϕв k
k ; (2)
; (2)
Δϕн k
k ; (3)
; (3)
t время запаздывания эхо-сигнала;
С скорость света;
аэ эквивалентный радиус Земли;
Zо высота над уровнем моря точки расположения устройства;
Z ( )- высотный профиль рельефа местности на трассе между устройством и целью.
)- высотный профиль рельефа местности на трассе между устройством и целью.
При этом из состава устройства-прототипа исключены диаграммообразующая схема приемной антенной системы, делитель и умножители выходных напряжений приемных каналов, а также электрическая цепь с коэффициентом передачи, равным квадратному корню из входного напряжения.
На фиг. 1 представлена упрощенная структурная схема предлагаемого устройства для измерения угла места маловысотных малоскоростных целей на фоне помеховых отражений от земли.
Устройство для измерения угла места состоит из приемной антенной системы, содержащей четыре разнесенных по высоте одинаковых горизонтально направленных симметричных излучающих элемента 1-4 (нумерация снизу вверх), импульсного передатчика 5 с передающей антенной 6, двух одинаковых приемников верхнего 7 и нижнего 8 каналов, входы каждого из которых связаны с выходами соответствующих высокочастотных устройств 9 и 10 вычитания верхнего и нижнего приемных каналов, двух управляемых фазовращателей 11 и 12, периодически изменяющих фазы принимаемых сигналов синхронно с зондирующими импульсами передатчика по закону (2) и (3) соответственно, и вычислителя 13, определяющего угол места θ маловысотной цели путем решения трансцедентного уравнения (1) по поступающим на входы этого вычислителя напряжениям видеосигналов Uв Uн с выходов приемников верхнего 7 и нижнего 8 каналов приема.
Элементы 4 и 2 приемной антенной системы связаны с входами высокочастотного устройства 9 вычитания верхнего приемного канала, (элемент 4 непосредственно, а элемент 2 через управляемый фазовращатель 11 верхнего приемного канала). Элементы 3 и 1 приемной антенной системы аналогично связаны с входами устройства 10 вычитания нижнего приемного канала.
Напряжение видеосигнала Uв с выхода приемника верхнего канала 7 поступает также в тракт измерения дальности D маловысотной цели.
Эхо-сигналы маловысотной цели приходят к элементам приемной антенной системы устройства двумя путями: прямой волной и волной, отраженной от земной поверхности. Пассивные помехи, представляющие собой результат обратного рассеяния энергии зондирующих импульсов передатчика на элементах земной поверхности, приходят к приемной антенне в основном с отрицательных углов места только прямой волной. Это схематически показано на фиг. 2, где изображены элементы 1-4 приемной антенной системы устройства, маловысотная цель, высотный профиль рельефа местности Z(D) на трассе между антенной системой и целью и лучи радиоволн эхо-сигналов цели, приходящие к элементам 2 и 4, а также лучи радиоволн обратных помеховых отражений от текущей ячейки разрешения сτ/2 (с скорость света, τ- длительность зондирующего импульса) на земной поверхности, приходящие к тем же элементам антенны.
Когда цель находится в области помеховых отражений от земли, эхо-сигналы цели и помеховые отражения от соответствующей ячейки разрешения приходят к антенне устройства одновременно, что затрудняет обнаружение и измерение угла места цели, эхо-сигналы которой теряются в этих помеховых отражениях.
Фаза помеховых отражений в элементе 4 (или 3) приемной антенны обычно отстает от фазы этих напряжений в элементе 2 (или 1) антенны, так как расстояние rв от текущей ячейки разрешения на земной поверхности до верхнего элемента антенны больше, чем соответствующее расстояние rн до расположенного ниже элемента 2 (фиг. 2). Если задержать фазу помеховых отражений с элемента 2 антенны на величину
Δϕ  (rв-rн) (4) с помощью управляемого фазовращателя 11 и вычесть помеховые отражения с элементов 4 и 2 с помощью высокочастотного устройства 9 вычитания, то на выходе этого устройства помеховые отражения от земли будут почти полностью подавлены. В нижнем канале приема аналогично использованы элементы 3 и 1 приемной антенны, управляемый фазовращатель 12 и устройство 10 вычитания. При этом полагается, что все элементы приемной антенны одинаковы, направлены горизонтально и имеют симметричные диаграммы направленности в вертикальной плоскости в свободном пространстве. Это обеспечивает примерное равенство амплитуд помеховых отражений от земли, принимаемых элементами 4 и 2 (или 3 и 1) приемной антенны.
(rв-rн) (4) с помощью управляемого фазовращателя 11 и вычесть помеховые отражения с элементов 4 и 2 с помощью высокочастотного устройства 9 вычитания, то на выходе этого устройства помеховые отражения от земли будут почти полностью подавлены. В нижнем канале приема аналогично использованы элементы 3 и 1 приемной антенны, управляемый фазовращатель 12 и устройство 10 вычитания. При этом полагается, что все элементы приемной антенны одинаковы, направлены горизонтально и имеют симметричные диаграммы направленности в вертикальной плоскости в свободном пространстве. Это обеспечивает примерное равенство амплитуд помеховых отражений от земли, принимаемых элементами 4 и 2 (или 3 и 1) приемной антенны.
Таким образом, предложенное устройство обеспечивает подавление помеховых отражений от земли в верхнем и нижнем приемных каналах.
Используя формулу (4), геометрию рисунка, изображенного на фиг. 2, и теорему косинусов, можно получить выражения (2) и (3) для сдвигов фаз Δϕв и Δϕн, на которые управляемые фазовращатели 11 и 12 должны изменять фазы сигналов, принимаемых элементами 2 и 1 приемной антенной системы, для обеспечения подавления помеховых отражений от земли в верхнем и нижнем приемных каналах. Эти сдвиги фаз зависят от времени t, рельефа местности Z( ) на трассе распространения радиоволн и других параметров, указанных в пояснениях к формулам (2) и (3).
) на трассе распространения радиоволн и других параметров, указанных в пояснениях к формулам (2) и (3).
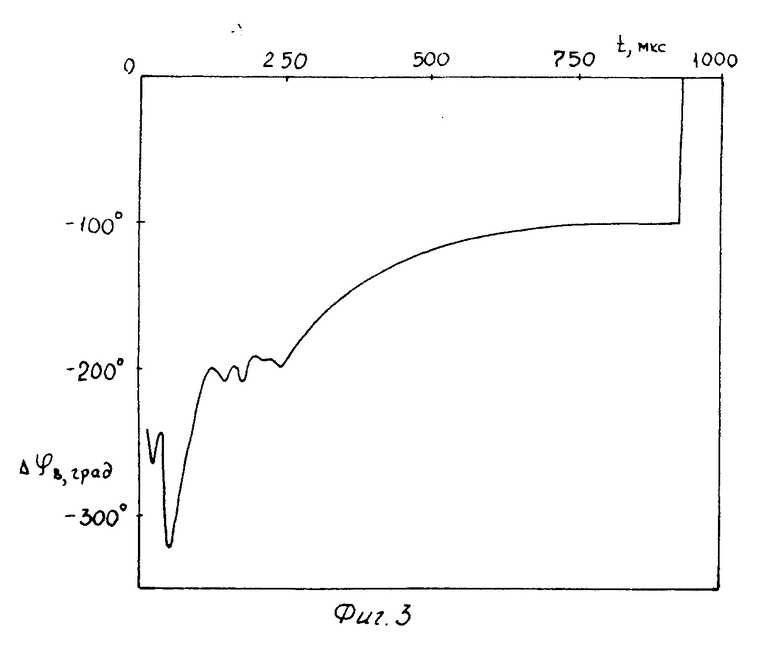
Пример расчетной фазовой характеристики управляемого фазовращателя 11 верхнего приемного канала представлен на фиг. 3, где приведена зависимость от времени запаздывания t фазового сдвига Δϕв, на который этот фазовращатель изменяет фазу принимаемых сигналов. Эта характеристика рассчитана для частной реализации предложенного устройства (длина волны λ= 0,35 м, высоты над землей излучающих элементов приемной системы h1 h4 равны соответственно 4, 7, 10 и 13 м) для трассы типа горы-море со сложным горным рельефом местности на сухопутном участке трассы. При одинаковом разносе по высоте излучающих элементов верхнего и нижнего каналов приемной антенной системы (при h4 h2 h3 h1) фазовые характеристики управляемых фазовращателей 11 и 12 отличаются не более чем на 1-2о, т.е. фазовращатели 11 и 12 практически одинаковы. Расчеты фазовых характеристик управляемых фазовращателей 11 и 12 показали, что необходимые для работы устройства фазовые характеристики фазовращателей могут быть реализованы с помощью известных конструкций управляемых фазовращателей.
Эхо-сигналы маловысотной цели на выходах устройств 9 и 10 вычитания, в отличие от помеховых отражений, не будут полностью подавлены и зачастую их уровень будет выше, чем в каком-либо одном из элементов антенны. Это объясняется следующим. Эхо-сигналы валовысотной цели приходят к любому элементу приемной антенны двумя путями: прямой волной и волной, отраженной от земли. При этом комплексная амплитуда напряжения  эхо-сигнала цели на выходе какого-либо приемного элемента антенны определяется известной формулой
эхо-сигнала цели на выходе какого-либо приемного элемента антенны определяется известной формулой λ
λ  Fэ(θ)e
Fэ(θ)e ejkhsinθ+
ejkhsinθ+ e
e , (5) где λ- длина волны;
, (5) где λ- длина волны;
Gm коэффициент усиления приемного элемента антенны;
Rвх входное сопротивление фидерного тракта;
S плотность мощности прямой радиоволны от цели вблизи антенны;
θ- угол места цели;
Fэ(θ) нормированная диаграмма направленности элемента приемной антенной системы в вертикальной плоскости в свободном пространстве;
ϕ- фаза радиоволны, приходящей от цели в точку расположения антенны на поверхности земли;
К 2 π/ λ- волновое число;
h высота элемента антенны над землей; комплексный коэффициент отражения радиоволн от земной поверхности при вертикальной или горизонтальной поляризации.
комплексный коэффициент отражения радиоволн от земной поверхности при вертикальной или горизонтальной поляризации.
При этом полагалось, что все элементы приемной антенной системы одинаковы, направлены горизонтально и имеют симметричные диаграммы направленности в вертикальной плоскости.
Известно, что при малых углах скольжения комплексный коэффициент отражения радиоволн от земли  -1 при любой поляризации радиоволн. Учитывая это, можно представить формулу (5) для комплексной амплитуды напряжения на выходе приемного элемента антенны в следующем виде:
-1 при любой поляризации радиоволн. Учитывая это, можно представить формулу (5) для комплексной амплитуды напряжения на выходе приемного элемента антенны в следующем виде: 2λ
2λ  Fэ(θ)e
Fэ(θ)e sin(khsinθ). (6)
sin(khsinθ). (6)
Из этой формулы видно, что напряжения эхо-сигналов маловысотной малоскоростной цели на выходах элементов приемной системы находятся либо в фазе, либо в противофазе и не могут иметь какого-либо иного сдвига фаз. Кроме того, эти напряжения (в отличие от соответствующих напряжений помеховых отражений) обычно отличаются друг от друга по амплитуде. Из этого следует, что сдвиг фаз напряжений эхо-сигналов цели с элементов 2 и 1 в управляемых фазовращателях 11 и 12 на Δϕв и Δϕн и последующее вычитание напряжений эхо-сигналов с элементов 4 (или 3) и с выходов фазовращателей 11 (или 12) обычно не приводит к полному подавлению эхо-сигналов цели на выходах устройств 9 и 10 вычитания.
Таким образом, на выходах устройств 9 и 10 вычитания эхо-сигналы маловысотной цели будут выделены, а обратные помеховые отражения от земной поверхности будут почти полностью подавлены.
При этом эхо-сигнал цели может не иметь заметного допплеровского сдвига частоты, т.е. предлагаемое устройство сможет эффективно обнаруживать малоскоростные маловысотные цели на фоне интенсивных помеховых отражений от земной поверхности.
Используя формулу (6), можно получить следующие выражения для комплексных амплитуд напряжений  ,
, на выходах верхнего и нижнего приемных каналов
на выходах верхнего и нижнего приемных каналов 2λK
2λK Fэ(θ)e
Fэ(θ)e sin(kh4sinθ)-sin(kh2sinθ)e
sin(kh4sinθ)-sin(kh2sinθ)e ;
;
(7) 2λK
2λK Fэ(θ)e
Fэ(θ)e sin(kh3sinθ)-sin(kh1sinθ)e
sin(kh3sinθ)-sin(kh1sinθ)e ,
,
(8) где Кy коэффициент усиления приемника (в верхнем и нижнем каналах приемники одинаковы).
Напряжения видеосигналов Uв, Uн на выходах приемников верхнего и нижнего каналов содержат в себе информацию об угле места маловысотной цели.
Используя формулы (7) и (8), можно найти отношение Uв/Uнвидеосигналов на выходах верхнего и нижнего приемных каналов. В результате получим трансцендентное уравнение (1) для определения угла места θмаловысотной цели. Решение этого уравнения производится вычислителем 13 в реальном масштабе времени.
Угломестный рабочий сектор предложенного устройства определяется средней высотой над землей (h2 + h4)/2 излучающих элементов 2 и 3 верхнего канала приемной антенной системы и половиной ширины диаграммы направленности передающей антенны в вертикальной плоскости. Угломестный рабочий сектор устройства:
0 < θ < arcsin . (9)
. (9)
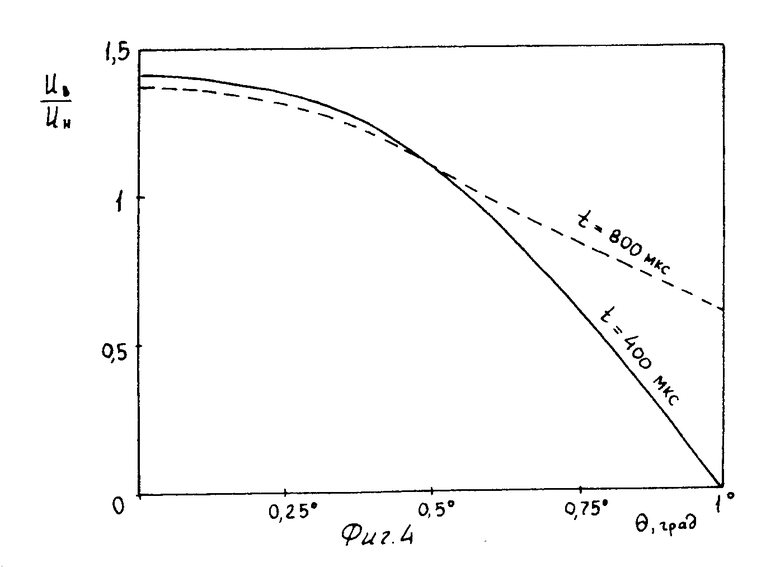
В этом угломестном секторе трансцендентное уравнение (1) обычно имеет единственное решение. Это можно видеть, например, из расчетных графиков (фиг. 4), где представлены рассчитанные по формуле (1) зависимости отношения Uв/Uн напряжений видеосигналов маловысотной цели на выходах верхнего и нижнего приемных каналов от угла места цели θ для двух значений времени запаздывания эхо-сигналов: t 800 мкс (штриховая кривая) и t 400 мкс. Эти расчеты проведены для частной реализации предложенного устройства (длина волны λ= 0,35 м, высоты над землей излучающих элементов приемной антенной системы h1-h4 равны соответственно 4, 7, 10 и 13 м) для трассы типа горы-море со сложным горным рельефом местности на сухопутном участке трассы.
Вне угломестного рабочего сектора устройства при углах места θ > arcsin трансцендентное уравнение (1) может иметь множество решений, что может привести к неоднозначности определения углов места целей. Для устранения этого недостатка следует исключить возможность приема эхо-сигналов целей с углов места θ > arcsin
трансцендентное уравнение (1) может иметь множество решений, что может привести к неоднозначности определения углов места целей. Для устранения этого недостатка следует исключить возможность приема эхо-сигналов целей с углов места θ > arcsin Это обеспечивается соответствующим выбором ширины диаграммы направленности передающей антенны в вертикальной плоскости. Следует выбрать вертикальный размер апертуры передающей антенны L ≥ h2 + h4. При этом высоколетящие цели под углами места θ > arcsin
Это обеспечивается соответствующим выбором ширины диаграммы направленности передающей антенны в вертикальной плоскости. Следует выбрать вертикальный размер апертуры передающей антенны L ≥ h2 + h4. При этом высоколетящие цели под углами места θ > arcsin окажутся за пределами главного лепестка диаграммы направленности передающей антенны, эхо-сигналы от таких целей будут очень слабы, потеряются в собственных шумах приемника и не будут мешать однозначно определять углы места маловысотных целей.
окажутся за пределами главного лепестка диаграммы направленности передающей антенны, эхо-сигналы от таких целей будут очень слабы, потеряются в собственных шумах приемника и не будут мешать однозначно определять углы места маловысотных целей.
Следует отметить, что на некоторых трассах со сложным рельефом местности уравнение (1) может иметь неоднозначные решения и в рабочем угломестном секторе, что определено формулой (9). Устранить неоднозначность в подобных случаях можно соответствующим подбором высот подъема над землей излучающих элементов приемной антенной системы.
Перечисленные выше элементы структурной схемы предложенного устройства (фиг. 1) выполнены следующим образом. Излучающие элементы 1-4 приемной антенной системы одинаковы, направлены горизонтально и имеют симметричные диаграммы направленности в свободном пространстве. В качестве этих элементов можно использовать, например, обычные рупорные или зеркальные антенны. В качестве передающей антенны 6 можно использовать зеркальную антенну с вертикальным размером апертуры L ≥ h2+ h4.
Управляемые фазовращатели 11 и 12 одинаковы (при h4 h2 h3 h1) и могут быть реализованы, например, в виде ферритового фазовращателя, для подмагничивания которого следует использовать импульсы постоянного тока с крутым передним и медленно спадающим задним фронтом. Частота следования этих импульсов должна быть равна частоте следования зондирующих импульсов передатчика. Другая реализация управляемых фазовращателей 11 и 12 возможна, например, в виде набора коротких отрезков полосковых линий, переключаемых р i n диодами. Для подключения таких линий следует использовать управляющие прямоугольные импульсы постоянного напряжения соответствующей длительности. При этом частота следования управляющих импульсов для р i n диодов также должна быть равна частоте следования зондирующих импульсов передатчика.
Вычислитель 13 представляет собой обычную микроЭВМ, решающую уравнение (1) в реальном масштабе времени. В состав вычислителя входят также аналого-цифровые преобразователи, преобразующие в цифровую форму напряжения Uв, Uн видеосигналов, поступающих на вычислитель с выходов приемников верхнего и нижнего каналов. Кроме того, этот вычислитель синхронизирован с работой передатчика и имеет цифровой датчик времени запаздывания. В память вычислителя заранее заносится информация о рельефе местности на заданной трассе в ответственном азимутальном секторе работы устройства. Для сокращения времени вычислений целесообразно заранее рассчитать и записать в память вычислителя зависимости (1) в виде набора таблиц для различных значений времени запаздывания t. Тогда в реальном масштабе времени вычислитель будет просто выбирать из этих таблиц значение угла места цели, соответствующее текущему времени запаздывания t и отношению видеосигналов Uв/Uн, и уточнять этот угол путем интерполяции.
Устройство для измерения угла места работает следующим образом.
Передатчик 5 с антенной 6 формирует и излучает зондирующий радиоимпульс в секторе малых углов места в течение интервала передачи. В течение интервала приема излучающие элементы 1-4 приемной антенной системы принимают эхо-сигналы цели и обратные помеховые отражения от земной поверхности. Помеховые отражения от земли, принятые нижними элементами 2 (или 1) антенной системы, выравниваются по фазе с соответствующими помеховыми отражениями с верхних 4 (или 3) элементов с помощью управляемых фазовращателей 11 (или 12) и поступают на высокочастотные устройства 9 (или 10) вычитания. На эти же устройства вычитания поступают также помеховые отражения, принятые верхними элементами 4 (или 3). На выходе устройств 9 и 10 вычитания помеховые отражения от земли почти полностью подавляются, а эхо-сигналы маловысотных целей выделяются и поступают далее в тракт приемников верхнего и нижнего каналов 7 и 8. Видеосигналы с выходов этих приемников поступают на вычислитель 13, который определяет по этим напряжениям и времени запаздывания угол места маловысотной цели путем решения трансцендентного уравнения (1). Видеосигнал с выхода приемника верхнего канала 7 поступает также в тракт измерения дальности целей.
Таким образом, предложенное устройство позволяет эффективно подавлять обратные помеховые отражения зондирующих сигналов от земной поверхности и обеспечивает возможность изменения углов места маловысотных малоскоростных целей в областях этих отражений. Предложенное устройство значительно эффективнее прототипа, который в подобных условиях практически не может измерять углы места маловысотных малоскоростных целей.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАЛЬНОМЕР ДЛЯ ОБНАРУЖЕНИЯ МАЛОВЫСОТНЫХ МАЛОСКОРОСТНЫХ ЦЕЛЕЙ НА ФОНЕ ПОМЕХОВЫХ ОТРАЖЕНИЙ ОТ ЗЕМЛИ | 1992 |
|
RU2038612C1 |
| НАЗЕМНЫЙ МАЛОВЫСОТНЫЙ РАДИОЛОКАЦИОННЫЙ ИЗМЕРИТЕЛЬ УГЛА МЕСТА ЦЕЛИ | 1992 |
|
RU2038610C1 |
| МАЛОВЫСОТНАЯ ПОМЕХОЗАЩИЩЕННАЯ РЛС | 1992 |
|
RU2038606C1 |
| УСТРОЙСТВО ЗАЩИТЫ ОТ ПОМЕХ МАЛОВЫСОТНОГО ДАЛЬНОМЕРА | 1992 |
|
RU2038605C1 |
| ПОМЕХОЗАЩИЩЕННЫЙ МАЛОВЫСОТНЫЙ ИЗМЕРИТЕЛЬ УГЛА МЕСТА ЦЕЛИ | 1992 |
|
RU2038611C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ОБНАРУЖЕНИЯ МАЛОВЫСОТНЫХ МАЛОСКОРОСТНЫХ ЦЕЛЕЙ НА ФОНЕ ПОМЕХОВЫХ ОТРАЖЕНИЙ ОТ ЗЕМЛИ | 1992 |
|
RU2040008C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА МЕСТА МАЛОВЫСОТНЫХ ЦЕЛЕЙ | 1992 |
|
RU2038607C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ОБНАРУЖЕНИЯ МАЛОСКОРОСТНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ НА СРЕДНИХ ВЫСОТАХ В ОБЛАСТИ ПОМЕХОВЫХ ОТРАЖЕНИЙ ОТ ЗЕМЛИ | 1992 |
|
RU2040009C1 |
| РАДИОЛОКАЦИОННЫЙ ИЗМЕРИТЕЛЬ УГЛА МЕСТА ВОЗДУШНЫХ ЦЕЛЕЙ | 1992 |
|
RU2038608C1 |
| ПРИЕМНАЯ СИСТЕМА ДЛЯ МАЛОВЫСОТНОЙ РЛС ОБНАРУЖЕНИЯ МАЛОСКОРОСТНЫХ ЦЕЛЕЙ НА ФОНЕ ИНТЕНСИВНЫХ ПОМЕХОВЫХ ОТРАЖЕНИЙ ОТ ЗЕМЛИ | 1992 |
|
RU2040007C1 |

Использование: измерение угла места целей. Сущность изобретения: устройство содержит приемную антенну из четырех излучающих элементов 1 - 4, передатчик 5, передающую антенну 6, приемник из двух каналов 7 и 8, блоки 9 и 10 вычитания, управляемые фазовращатели 11 и 12 и вычислитель 13 угла места. 1-12-10-8-13, 2-11-9-7-13, 3-10, 4-9. 4 ил.
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА МЕСТА МАЛОВЫСОТНЫХ МАЛОСКОРОСТНЫХ ЦЕЛЕЙ НА ФОНЕ ПОМЕХОВЫХ ОТРАЖЕНИЙ ОТ ЗЕМЛИ, содержащее импульсный передатчик, соединенный с передающей антенной, двухканальный приемник и приемную антенную систему, отличающееся тем, что приемная антенная система выполнена из четырех разнесенных по высоте одинаковых горизонтально направленных симметричных излучающих элементов, при этом сумма высот над Землей верхнего и второго снизу излучающих элементов не превышает вертикального размера апертуры передающей антенны, верхний и третий снизу излучающие элементы соединены с первыми входами блоков вычитания непосредственно, а второй снизу и нижний излучающий элементы соединены с вторыми входами блоков вычитания через управляемые фазовращатели, выходы блоков вычитания соединены с входами соответственно верхнего и нижнего каналов приемника, выходы видеосигналов которых соединены с входами вычислителя для определения угла места θ маловысотной цели по формуле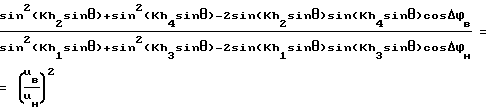
где Uв, Uн напряжения видеосигналов на выходах верхнего и нижнего приемных каналов;
K = 2π/λ волновое число;
l длина волны;
h1, h2, h3, h4 высоты над Землей излучающих элементов приемной антенной системы;
Dvв,Δϕн сдвиги фаз, равные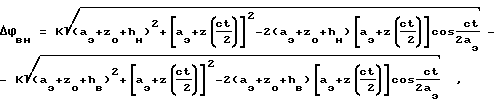
hн h2; hв h4 для верхнего приемного канала;
hн h1; hв h3 для нижнего приемного канала;
t время запаздывания эхо-сигнала;
c скорость света;
aэ аквивалентный радиус Земли;
z0 высота над уровнем моря точки расположения измерителя; высотный профиль рельефа местности на трассе между измерителем и целью.
высотный профиль рельефа местности на трассе между измерителем и целью.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Патент США N 3854135, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
