Изобретение относится к электрическим измерениям, к испытанию асинхронных двигателей (АД), предназначено для контроля потребляемого тока АД и может быть использовано при приемосдаточных испытаниях АД.
Известен способ контроля тока АД, основанный на измерении силы тока в режимах холостого хода (х.х.) и короткого замыкания (к.з.) и сравнении их с известными уставками, сущность которого заключается в том, что показания шкальных измерительных приборов фиксируются и сравниваются с допусками оператором-человеком.
Недостатком этого способа контроля является низкий уровень автоматизации измерений, а также низкая достоверность контроля из-за наличия человеческого фактора.
Наиболее близким по технической сущности и достигаемому положительному эффекту к изобретению является способ контроля тока АД, заключающийся в том, что потребляемый ток АД преобразуется в напряжение постоянного тока, пропорциональное действующему значению измеряемого тока, которое преобразуется в цифровой код и полученные цифровые эквиваленты измеряемого тока сравниваются с допусками.
Недостатком этого способа является малая достоверность контроля тока АД вследствие нестабильности питающего напряжения, при которой возможны ошибочные результаты при сравнении цифровых эквивалентов с допусками, рассчитанными для номинального значения напряжения питающей сети. Кроме того, измерения фазных токов при разных значениях напряжения питающей сети приводит к ошибочным результатам испытания по асимметрии токов х.х. и к.з.
Целью изобретения является повышение достоверности контроля потребляемого тока АД при испытаниях в режимах х.х. и к.з.
Это достигается тем, что при измерении тока АД перед преобразованием в цифровой код дополнительно из сигнала потребляемого тока вычитывается сигнал при- ращения потребляемого тока, возникающего как следствие отклонения напряжения питающей сети от номинального значения и для определения которого измеряется напряжение питающей сети, из которого вычитывается номинальное значение напряжения, разностный сигнал умножается на сигнал потребляемого тока, определяется отношение полученного сигнала к сигналу напряжения питающей сети.
Таким образом, предлагаемый способ представляет собой следующую последовательность операций: измерение значений потребляемого тока и напряжения питающей сети АД, вычитание из напряжения питающей сети его номинального значения, формирование сигнала, равного произведению разностного сигнала на сигнал потребляемого тока, определение отношения полученного сигнала к сигналу напряжения питающей сети, вычитание данного сигнала из сигнала потребляемого тока, преобразование этого сигнала в цифровой код, сравнение кода с допусками и индицирование результата сравнения.
Сущность предлагаемого способа заключается в следующем.
Данный способ основан на применении линейной адаптации контроля к значениям питающего напряжения АД. Возможность осуществления подобной адаптации вытекает из того, что зависимость величины потребляемого тока I в режимах х. х. и к.з. от величины питающего напряжения при малых отклонениях последнего от номинального Uн носит квазилинейный характер, т.е. можно записать:
U ZI, (1) где Z характеризует комплексное сопротивление обмоток двигателя. Величину питающего напряжения U можно представить в виде суммы напряжения номинального режима Uн и отклонения от него Δ U
U Uн + Δ U. (2)
Так как при испытаниях АД Δ U обычно невелико, то разделив (2) почленно на Z, получают
I l + Δ I, (3) где
+ Δ I, (3) где
I U/Z; l = Uн/Z; Δ I (U Uн)/Z
= Uн/Z; Δ I (U Uн)/Z
Из (3) имеют
l I Δ I I (U Uн)/Z (4)
I Δ I I (U Uн)/Z (4)
Выразив из (1) величину Z через U и I и подставив ее в (4), получают
l I I (U Uн)/U. (5)
I I (U Uн)/U. (5)
Использование выражения (5) при построении систем контроля АД позволяет исключить влияние изменения питающего напряжения на величину потребляемого тока, что повышает достоверность контроля потребляемого тока. Следовательно, предлагаемый способ соответствует критерию "новизна".
Сравнение предлагаемого способа не только с прототипом, но и с другими работами в данной области не позволяет выявить в них сходные признаки, проявляемые совпадающие свойства, что позволяет сделать вывод о соответствии критерию "существенные отличия".
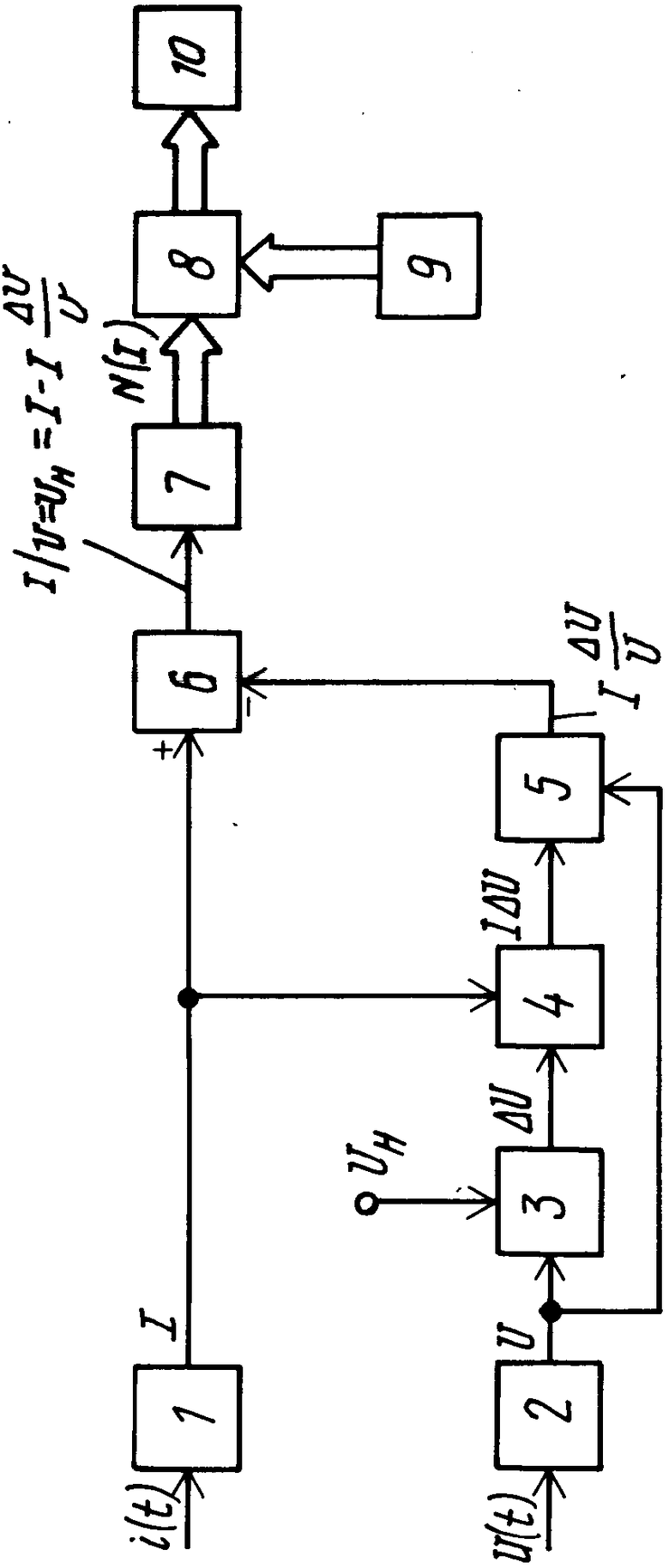
На чертеже приведена структурная схема устройства, реализующего способ.
Устройство содержит измерительный преобразователь 1 тока, измерительный преобразователь 2 напряжения, блоки 3 и 6 вычитания, умножитель 4 сигналов, делитель 5 сигналов, аналого-цифровой преобразователь 7, цифровой компаратор 8, блок 9 памяти, индикатор 10.
Устройство работает следующим образом.
С выхода измерительного преобразователя 2 сигнал подается на вход блока 3, на другой вход которого подается сигнал Uн. Разность U-Uн поступает на вход умножителя 4, на второй вход которого с датчика тока поступает сигнал, пропорциональный потребляемому току. С выхода умножителя 4 сигнал I(U-Uн) поступает на первый вход делителя 5, на второй вход которого с выхода измерительного преобразователя напряжения 2 поступает сигнал, пропорциональ- ный напряжению U. С выхода делителя 5 сигнал I(U-Uн)/U поступает на второй вход блока вычитания 6, на первый вход которого подается сигнал с выхода измерительного преобразователя тока 1. В аналого-цифровом преобразователе 7 сигнал I-I(U-Uн)/U с выхода блока вычитания 6 преобразуется в цифровой код. Этот код подается на цифровой компаратор 8, где сравнивается со значениями допусков, хранящихся в блоке 9. Результат сравнения подается на индикатор 10.
Функциональные узлы устройства, реализующего способ, выполняются на широко распространенных элементах аналоговой и цифровой техники. В качестве измерительных преобразователей тока 1 и напряжения 2 могут быть использованы преобразователи Е854 и Е855, серийно выпускаемые промышленностью. Аналоговый делитель 5 и аналоговый умножитель 4 могут быть выполнены по известным схемам. В качестве блока памяти 9 могут служить програм- мируемые логические матрицы, микросхемы ПЗУ и ППЗУ. Цифровой компаратор может быть построен на соответствующих логических микросхемах.
Таким образом, предлагаемый способ позволяет повысить достоверность контроля параметров АД и сократить количество ложно отбракованных двигателей, что приводит к повышению эффективности контроля качества продукции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой измеритель напряжений | 1974 |
|
SU636541A1 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ИНФОРМАЦИИ | 1991 |
|
RU2031444C1 |
| Способ измерения аналоговой величины | 1986 |
|
SU1422168A1 |
| Преобразователь интегральных параметров сигналов переменного тока в код | 1988 |
|
SU1582145A1 |
| УСТРОЙСТВО ДЛЯ БУРЕНИЯ НАКЛОННЫХ СКВАЖИН | 1991 |
|
RU2039186C1 |
| СПАЙДЕР | 1991 |
|
RU2030543C1 |
| МАГНИТНОЕ УСТРОЙСТВО ДЛЯ ОЧИСТКИ ГАЗОВ | 1991 |
|
RU2023476C1 |
| Устройство для сбора и преобразования морской сейсмической информации | 1986 |
|
SU1472856A1 |
| Преобразователь активной мощности в код | 1988 |
|
SU1529140A2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ПЛОСКИХ ФИГУР | 1991 |
|
RU2031443C1 |
Использование: электрические измерения в технике асинхронных двигателей (АД) при приемосдаточных испытаниях АД. Сущность изобретения: действующее значение потребляемого тока преобразуется в сигнал постоянного тока, который преобразуется в цифровой код и полученные цифровые эквиваленты измеряемого тока сравниваются с допусками, перед преобразованием в цифровой код вводятся операции измерения напряжения питания, вычитания из напряжения питания его номинального значения, формирования сигнала, равного произведению разностного сигнала на сигнал потребляемого тока, определения отношения полученного сигнала к сигналу напряжения питания, вычитания данного сигнала из сигнала потребляемого тока. Изобретение обеспечивает высокую достоверность контроля потребляемого тока АД, достигаемую исключением влияния изменения напряжения питания на результаты контроля при испытаниях в режимах холостого хода и короткого замыкания. 1 ил.
СПОСОБ КОНТРОЛЯ ТОКА АСИНХРОННЫХ ДВИГАТЕЛЕЙ, заключающийся в том, что действующее значение потребляемого тока асинхронного двигателя преобразуется в сигнал постоянного тока, который преобразуется в цифровой код, и полученный цифровой эквивалент действующего значения тока сравнивается с допусками, отличающийся тем, что действующее значение напряжения питания преобразуется в сигнал постоянного тока, из которого вычитывается опорный сигнал постоянного тока, эквивалентный действующему значению номинального напряжения питания, разностный сигнал умножается на сигнал постоянного тока, пропорциональный действующему значению потребляемого двигателем тока, результат умножения делится на сигнал постоянного тока, пропорциональный действующему значению напряжения питания, в результате чего формируется сигнал корректирующей поправки, который вычитывается из результата преобразования действующего значения потребляемого тока.
| Аракелов М.А., Мамагадзе И.П | |||
| - Автоматическая система допускового контроля мощности и тока при производстве электродвигателей | |||
| - ж | |||
| Измерительная техника, n 1, 1977. |
