Изобретение относится к измерительной технике и может быть использовано для определения параметров движения подводных объектов.
Известен способ определения характера перемещения подводных объектов, реализуемый с помощью схемы, содеpжащей N первичных преобразователей, блоки обработки информации и визуального изображения [1]
Недостаток устройства, реализующего известный способ, обусловлен сложностью его реализации.
Целью изобретения является упрощение.
Цель достигается за счет того, что в схему дистанционного обнаружения, определения направления и скорости движущихся подводных объектов, содержащую N первичных преобразователей, блок обработки информации и блок визуального изображения, введены два амплитудных дискриминатора, инвертор, тиристорный ключ, детектор, элемент задержки, одновибратор, элемент совпадения, два двоичных счетчика, два дешифратора, N электронных ключей, четыре согласующих элемента, интегрирующий элемент, N триггеров, при этом выход первого амплитудного дискриминатора соединен с входом инвертора, выход которого подключен к тиристорному ключу, входу детектора и первому входу элемента совпадения, выход тиристорного ключа подключен к объединенным входам первичных преобразователей, выходы которых соединены с соответствующими выходами электронных ключей, выход детектора подключен к входу пеpвого двоичного счетчика, элемента задержки и второго согласующего элемента, выход которого соединен с вторым входом второго двоичного счетчика, выход которого соединен с первым входом второго дешифратора, каждый N-й выход которого соединен с входом каждого N-го триггера, соединенных с блоком визуального изображения, при этом выход элемента задержки соединен с входом одновибратора, выход которого соединен с вторым входом элемента совпадения, выход которого соединен с входом первого согласующего элемента, соединенного с третьим согласующим элементом, выход которого подключен к входу интегрирующего элемента и второму входу второго дешифратора, выход интегрирующего элемента соединен с входом второго амплитудного дискриминатора, выход которого соединен с первым входом второго двоичного счетчика.
При этом первичные преобразователи могут быть выполнены в виде термодатчиков, а блок визуального изобретения в виде светового табло с N сигнальными лампами, соединенными между собой, каждая из которых подключена к выходу соответствующего триггера.
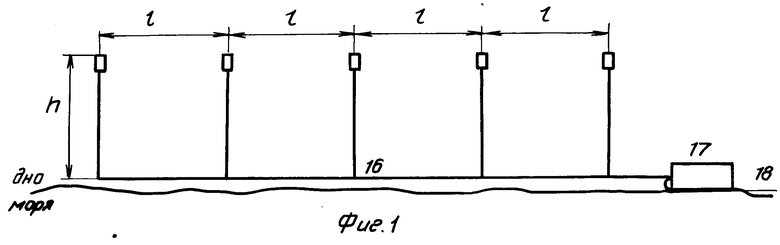
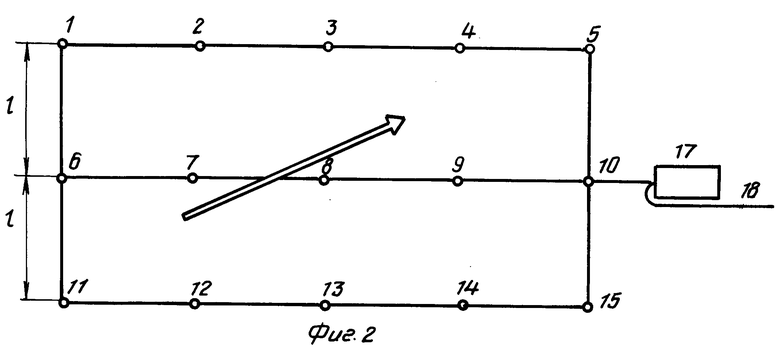
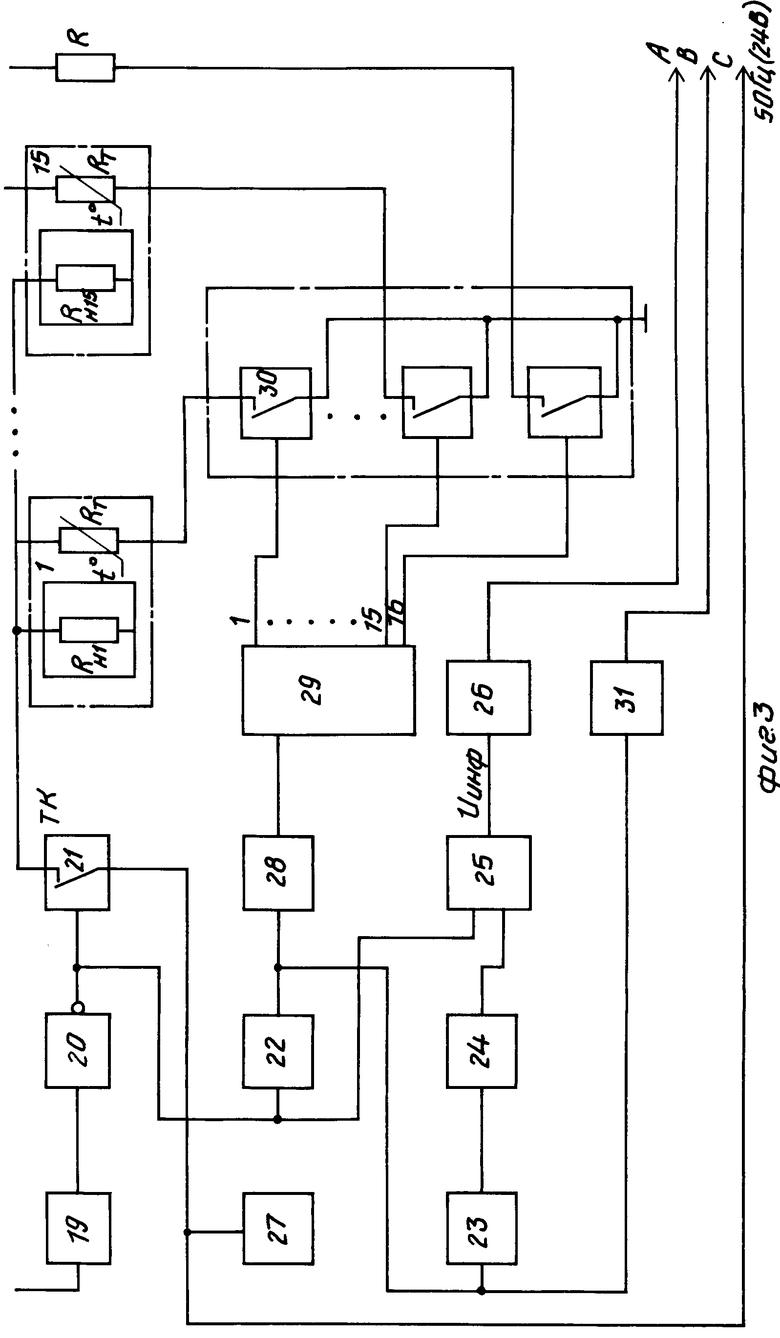
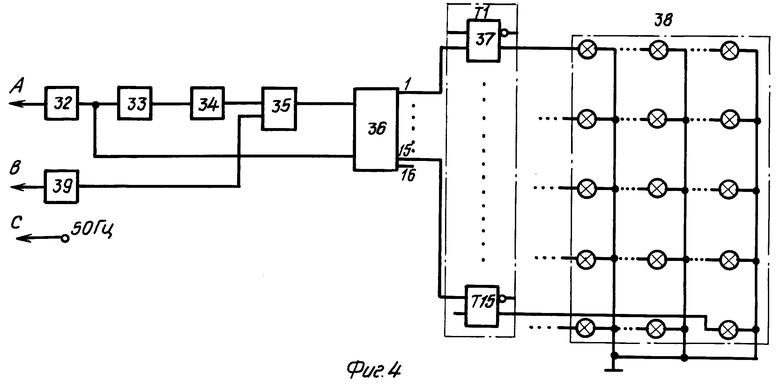
На фиг. 1,2 показано расположение и соединение термочувствительных элементов; на фиг. 3 схема блока обработки информации; на фиг.4 схема подключения светового табло блока визуального изображения информации.
Схема дистанционного обнаружения, определения направления и скорости движущихся подводных объектов содержит, например, пятнадцать термодатчиков 1-15, установленных в шахматном порядке на расстоянии друг от друга в подвешенном состоянии на высоте h от дна моря. Термодатчики 1-15 удерживаются пробками (на чертеже не показаны) и жгутом 16, который укладывается на дно моря по выбранным направлениям. Расстояние l между термодатчиками 1-15 выбирается в 2-3 раза превышающим размеры контролируемого объекта (какого-либо аппарата или косяка рыб), а высота h в интервале предполагаемой глубины погружения контролируемого объекта. Жгуты 16 соединяют термодатчики 1-15 с блоком 17 обработки информации, установленным под водой и соединенным кабелем 18 со световым табло блока изображения информации. Блок обработки информации содержит последовательно соединенные амплитудный дискриминатор 19, инвертор 20, управляющий вход тиристорного ключа 21, выход которого соединен с объединенными входами термодатчиков 1-15. Выход инвертора 20 связан с входом детектора 22, выход которого соединен с последовательно соединенными элементами 23 задержки, одновибратором 24, первым входом элемента 25 совпадения, второй вход которого соединен с входом детектора 22, а выход с первым согласующим (эмиттерный повторитель) элементом 26, выход которого связан через кабель (жила А) с блоком визуального изображения информации. Вход ключа 21 подключен через преобразователь 27 напряжения и жилу с кабеля 18 с источником питания 50 Гц. Выход детектора 22 соединен через первый двоичный счетчик 28 с первым дешифратором 29, выходы которого подключены к соответствующим управляющим входам N электронных ключей 30, одни из входов которых объединены, а другие подключены к соответствующим выходам термодатчиков 1-15. Вход элемента 23 задержки соединен с входом второго согласующего элемента 31 и через жилу А кабеля 18 поступает на вход третьего согласующего элемента 32, выход которого через последовательно соединенные интегрирующий элемент 32, второй амплитудный дискриминатор 34, первый вход второго двоичного счетчика 35, выход которого соединен с первым входом второго дешифратора 36, выходы которого через N триггеров 37 соединены с соответствующими сигнальными лампами 38, при этом вторые входы дешифратора 36 и счетчика 35 соединены соответственно с выходом согласующего элемента 31 и через четвертый согласующий элемент 39 с входом элемента 23 задержки.
Схема работает следующим образом.
Предположим, что контролируемый объект движется по направлению, указанному стрелкой (см.фиг.2). Образующиеся подводные вихри будут сначала воздействовать на термодатчики 6,11, затем 7,8 и 4,5. Следовательно, по сигналам с этих термодатчиков можно определить направление движения, а зная расстояние между термодатчиками и временные интервалы между сигналами от них, можно определить ско-рость движения контролируемого подводного объекта. При этом о направлении движения судят по очередности зажигания сигнальных ламп 38, Затем, фиксируя моменты τi загорания ламп 38, определяют интервалы времени Δτij между ними. Нормальное функционирование осуществляется за счет подбора параметров отдельных элементов схем. Так, сопротивление R должно иметь такую величину, чтобы на выходе инвертора 20, а следовательно, и на выходе элемента 25 совпадения был импульс, длительность которого в несколько раз превышает максимально возможную длительность сигнала на выходе термодатчиков 1-15.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения состояния флюидов | 1984 |
|
SU1339242A1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 1991 |
|
RU2025778C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОТНОСИТЕЛЬНЫХ УРОВНЕЙ ПОБОЧНЫХ КОЛЕБАНИЙ РАДИОПЕРЕДАТЧИКОВ | 1990 |
|
RU2033618C1 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА СТАРТСТОПНЫХ СООБЩЕНИЙ | 2002 |
|
RU2233040C2 |
| ИНТЕГРИРУЮЩИЙ АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 2012 |
|
RU2496228C1 |
| РАДИОЛУЧЕВОЙ ДАТЧИК ОХРАНЫ | 1992 |
|
RU2079889C1 |
| Передающее устройство телеизмерительной системы | 1978 |
|
SU746671A1 |
| ИЗМЕРИТЕЛЬ ДЛИТЕЛЬНОСТИ ПОДГОТОВИТЕЛЬНОЙ СТАДИИ РАЗРЯДА В СВЕЧАХ ЗАЖИГАНИЯ | 2000 |
|
RU2182339C2 |
| УСТРОЙСТВО ПОЖАРНОЙ СИГНАЛИЗАЦИИ | 1989 |
|
RU2024062C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО КОНТРОЛЯ | 1991 |
|
RU2006896C1 |
Сущность изобретения: схема содержит N термодатчиков, два амплитудных дискриминатора, инвертор, тиристорный ключ, детектор, элемент задержки, одновибратор, элемент совпадения, четыре согласующих элемента, два двоичных счетчика, два дешифратора, N электронных ключей, интегрирующий элемент, N триггеров, N сигнальных ламп. 2 з.п. ф-лы, 4 ил.
| СПОСОБ ПРОИЗВОДСТВА ХЛЕБНОГО КВАСА | 2015 |
|
RU2591347C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
