Изобретение относится к машиностроению и может быть использовано в транспортных средствах, станкостроении, а также в других системах и объектах, где требуется автоматическое плавное изменение частоты вращения ведомого вала в зависимости от момента нагрузки на нем при постоянной частоте вращения приводного двигателя.
Известен импульсный вариатор, содержащий ведущий и ведомый валы, солнечное, колесо, водило с сателлитами, механизм свободного хода (МСХ) и эксцентрик с шатунами [1] Его недостатки: неравномерность хода ведомого вала, низкая долговечность, связанная с использованием роликовых муфт свободного хода, ограничение по частоте вращения до 1000 об/мин, отсутствие возможности саморегулирования.
Известен фрикционный вариатор, содержащий ведущий и ведомый валы, водило, несущее сателлиты, жестко связанные с конусами, центральное колесо и кольцо [2]
Недостатками фрикционного вариатора являются большие давления на валы и опоры, связанные с использованием сил трения для передачи момента, нежесткость характеристики передачи, малая долговечность и низкий КПД за счет геометрического скольжения в зонах контакта, ограничения по передаваемой мощности, отсутствие возможности самонастройки.
Известна гидромеханическая коробка передач (гидропередача), содержащая фрикционы, механическую коробку передач, три лопаточных колеса, рабочее тело (жидкость), насосы, трубопроводы [3]
Недостатками известной гидропередачи являются: увеличенная масса, низкий КПД, зависимый от передаточного отношения, низкая средняя мощность двигателя при разгоне транспортного средства, хотя она и несколько выше, чем при разгоне с помощью коробки передач.
К недостаткам гидропередачи следует также отнести отсутствие возможности плавного саморегулирования передаточного отношения.
С целью повышения КПД и надежности, плавного набора скорости, возможности организации саморегулирования передаточного отношения вариатора в зависимости от динамики транспортного средства и профиля пути, сокращения расхода топлива и выброса вредных выхлопных газов в процессе разгона, упрощения управления транспортным средством, а также повышения ресурса двигателя и трансмиссии за счет улучшения их динамики, повышения ресурса тормозной системы за счет появления возможности плавного торможения двигателем, предлагаемый саморегулируемый голономный бесступенчатый вариатор непрерывного действия (механический трансформатор момента) выполнен полностью на зубчатом зацеплении и содержит два дифференциальных механизма, одни из одноименных звеньев которых объединены между собой планетарной зубчатой связью с определенным передаточным отношением, с водилом которой связан приводной двигатель, другие одноименные звенья жестко связаны между собой, одно из третьих одноименных звеньев жестко соединено со стойкой, другое такое звено соединено с валом электрического генератора, мощность которого составляет лишь часть мощности приводного двигателя.
При применении указанного вариатора появляется возможность производить разгон транспортного средства при полной мощности двигателя, частота вращения которого практически постоянна при высоком КПД двигателя, малом расходе топлива и более полном его сгорании. Разгон производится плавно без переключения рычага коробки передач, имеющейся на большинстве транспортных средств, что упрощает управление и ведет к увеличению ресурса двигателя и трансмиссии, так как улучшается их динамика. Увеличивается также ресурс тормозной системы, так как появляется возможность плавного торможения двигателем.
Время разгона транспортного средства с помощью предлагаемого вариатора уменьшается примерно в 3 4 раза по сравнению с временем разгона при использовании стандартной коробки передач или гидропередачи.
При использовании предлагаемого вариатора число органов управления равно числу органов управления серийных транспортных средств за исключением того, что рычаг переключения передач нужен только для организации заднего хода и нейтрального положения, необходимого при запуске двигателя и движении накатом.
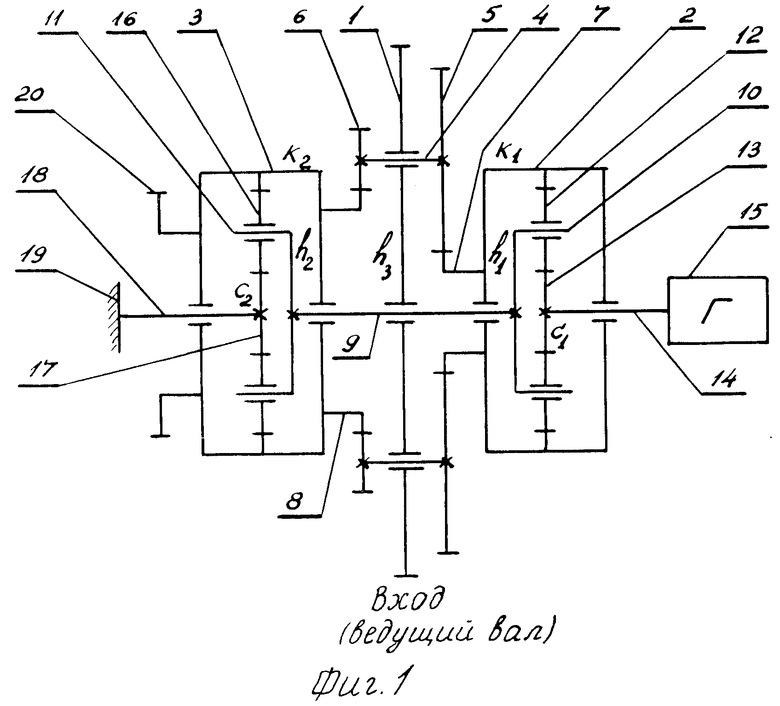
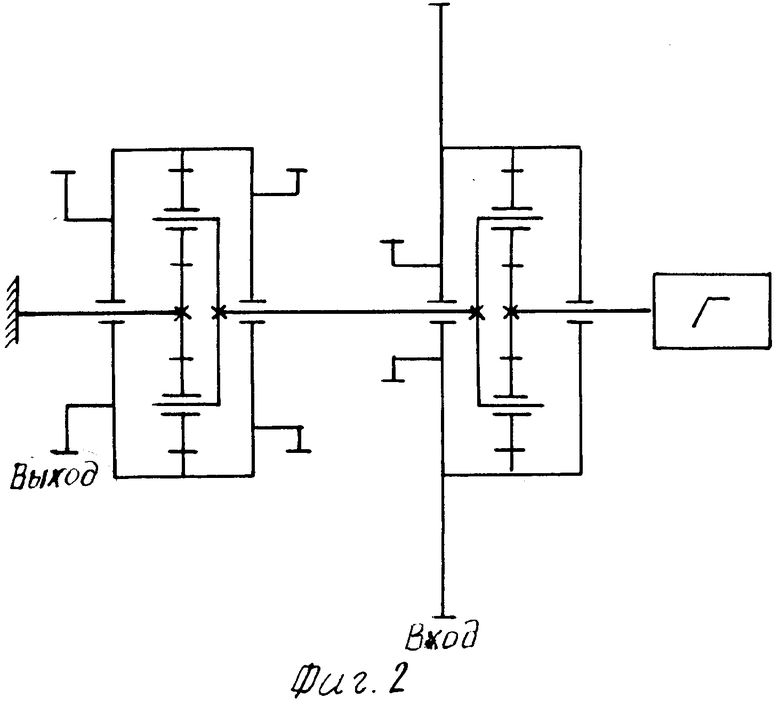
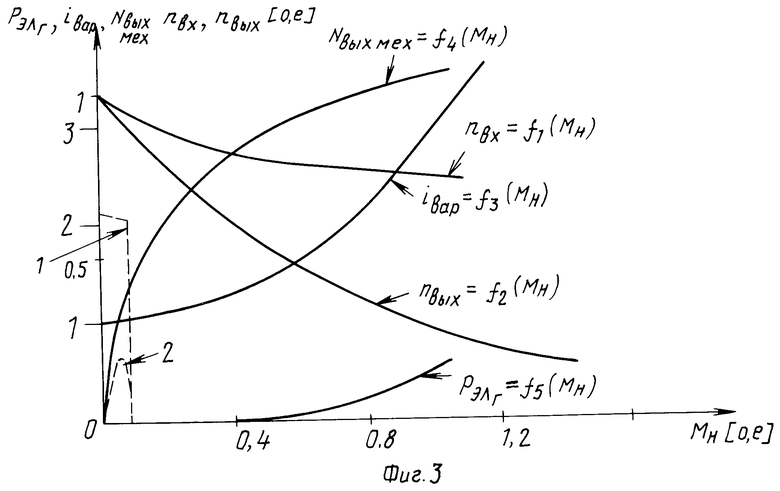
На фиг. 1 представлена кинематическая схема предлагаемого саморегулируемого голономного бесступенчатого вариатора непрерывного действия (механического трансформатора момента); на фиг. 2 кинематическая схема известного механизма, но без планетарной связи между коронами К1 и К2; на фиг. 3 характер зависимости nвых, nвх, iвар, Nвых.мех. от изменения момента нагрузки на ведомом валу вариатора при передаточном отношении между коронами К1 и К2 дифференциальных механизмов i , которое равно передаточному отношению i
, которое равно передаточному отношению i , в свою очередь равному
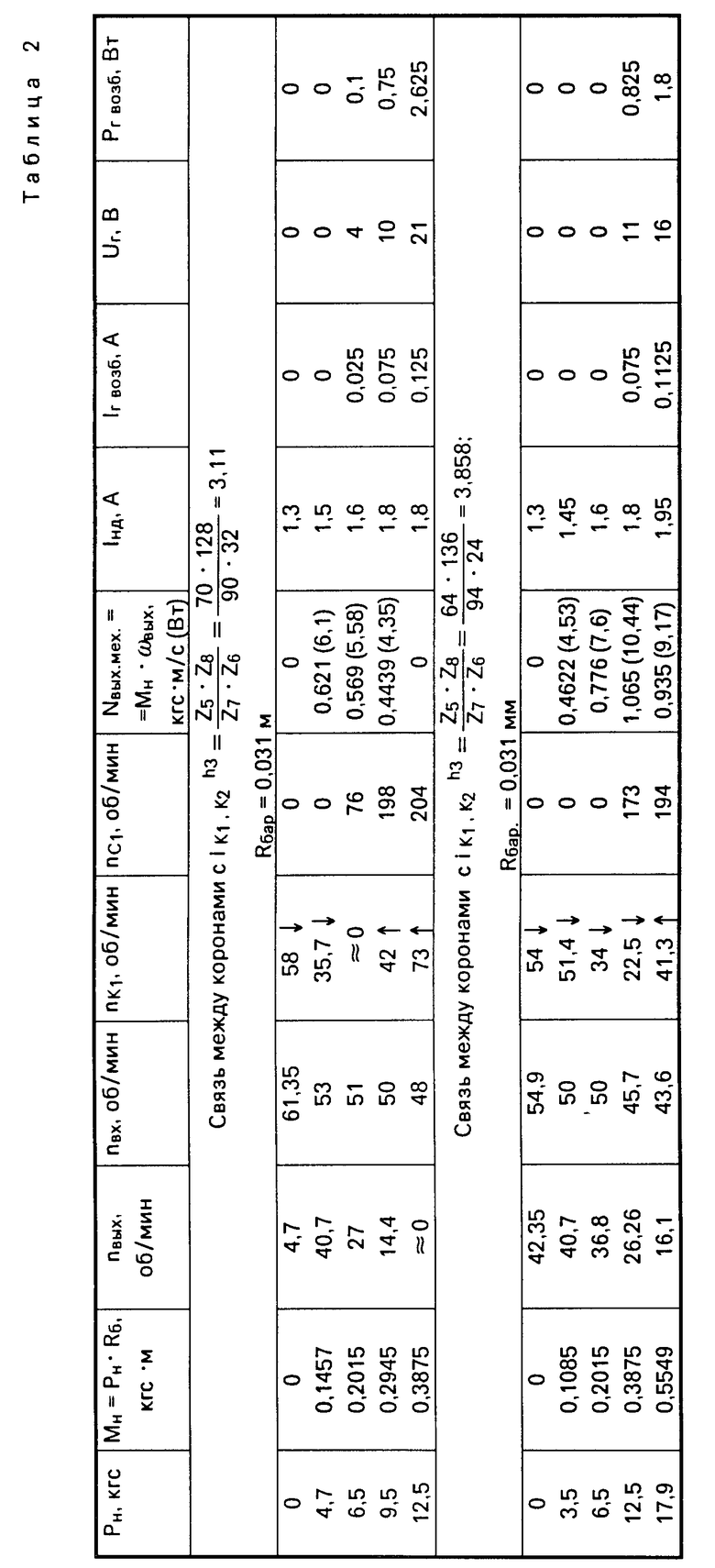
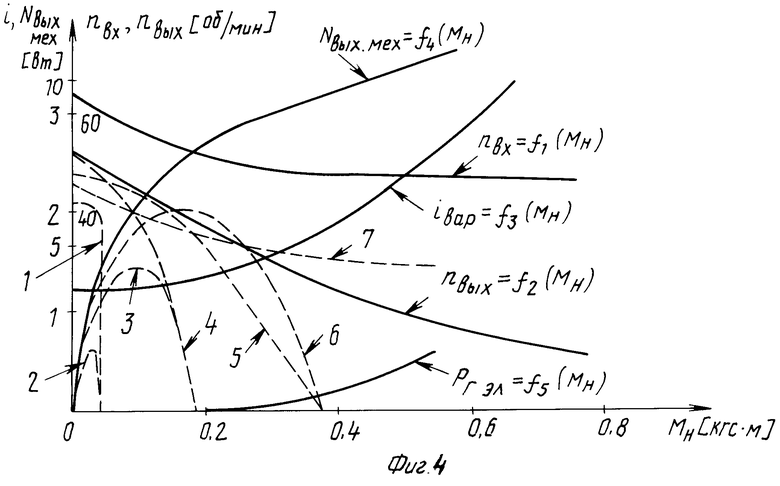
, в свою очередь равному  (см. фиг. 1). Графики представлены в относительных единицах, для сравнения здесь же представлены те же зависимости для механизма без планетарной связи между коронами (см. фиг. 2), но при прочих равных условиях; на фиг. 4 графики функций nвых, nвх, iвар, Nвых.мех. в зависимости от изменения момента нагрузки на ведомом валу вариатора при различных значениях передаточного отношения между коронами К1 и К2 дифференциальных механизмов, снятые экспериментальным путем. Экспериментальные данные приведены в таблицах.
(см. фиг. 1). Графики представлены в относительных единицах, для сравнения здесь же представлены те же зависимости для механизма без планетарной связи между коронами (см. фиг. 2), но при прочих равных условиях; на фиг. 4 графики функций nвых, nвх, iвар, Nвых.мех. в зависимости от изменения момента нагрузки на ведомом валу вариатора при различных значениях передаточного отношения между коронами К1 и К2 дифференциальных механизмов, снятые экспериментальным путем. Экспериментальные данные приведены в таблицах.
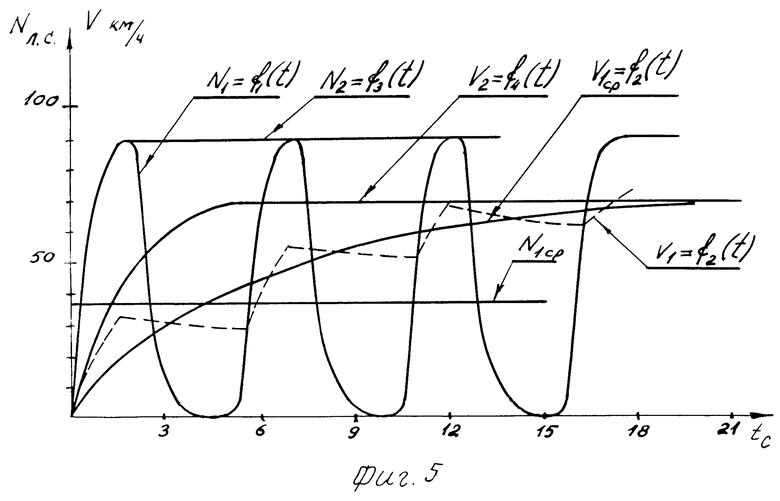
На фиг. 5 представлены графики функций мощности, развиваемой двигателем N1 f1(t); N1ср; V1 f2(t); V1ср f2(t) при разгоне транспортного средства с помощью ступенчатой коробки передач, а также графики функций мощности двигателя и скорости движения N2 f3(t); V2 f4(t) при разгоне транспортного средства с помощью предлагаемого вариатора.
Рассмотрим кинематическую схему саморегулируемого голономного бесступенчатого вариатора непрерывного действия (механического трансформатора момента), представленную на фиг. 1. Следует отметить, что на фиг. 1 представлена одна из возможных кинематических схем предлагаемого вариатора, а именно схема с объединенными (жестко соединенными) водилами h1 и h2 дифференциальных механизмов, возможны также схемы с объединенными солнечными колесами или с объединенными коронами.
Двигатель внутреннего сгорания или любой другой двигатель вращает ведущий (входной) вал 1, который является водилом h3 планетарной связи между коронами 2(К1) и 3(К2) одинаковых дифференциальных механизмов. Вал 1 (водило h3) свободно и соосно установлен на главной оси механизма. В водиле h3 свободно установлена ось 4, на концах которой жестко насажены сателлиты 5 и 6, входящие в зацепление с зубчатыми колесами 7 и 8 соответственно, соосно и жестко установленными на коронах 2 и 3 дифференциальных механизмов.
На концах оси 9 жестко установлены водила 10 (h1) и 11 (h2) дифференциальных механизмов. На осях водила 10 свободно установлены сателлиты 12, входящие в зацепление, с одной стороны, с солнечным колесом 13 (С1), жестко насаженным на вал 14, на другом конце которого устанавливается электрический генератор 15, а, с другой стороны, сателлиты 12 входят в зацепление с короной 2.
На осях водила 11 (h2) свободно установлены сателлиты 16, входящие в зацепление с одной стороны с короной 3, а, с другой стороны с солнечным колесом 17 (С2), жестко установленном на валу 18. Другой конец вала 18 жестко закреплен на стойке 19.
На короне 3 жестко и соосно установлено зубчатое колесо 20, являющееся ведомым (выходным) валом вариатора.
Саморегулируемый голономный бесступенчатый вариатор непрерывного действия работает следующим образом.
Двигатель внутреннего сгорания (или любой другой двигатель) работает в оптимальном с точки зрения расхода топлива, отдаваемой мощности и полноты сгорания топлива режиме при практически постоянной частоте вращения ведущего вала 1 вариатора.
Вращение с ведущего вала 1 передается через сателлиты 5 и 6 на короны 2 и 3 дифференциальных механизмов через зубчатые колеса 7 и 8 соответственно. С зубчатого колеса 8 вращение передается через корону 3 на ведомый вал 20 вариатора. Так как солнечное колесо 17 жестко заблокировано на стойку 19, то движение от короны 3 через сателлиты 16 передается на водило 11, вал 9 и на водило 10 другого дифференциального механизма.
Вращение на вал 14 генератора 15 передается с двух сторон: с одной стороны от короны 2 через сателлит 12 на солнечное колесо 13, с другой стороны через водило 10 также на сателлит 12 и на солнечное колесо 13. Оба движения суммируются на валу 14 генератора 15.
Как показала экспериментальная проверка оптимальным передаточным отношением с короны 2 (К1) на корону 3 (К2) (см. фиг. 4) является передаточное отношение i = i
= i =
=  которое обеспечивает передачу большей части мощности от приводного двигателя с ведущего вала 1 на ведомый вал 20 вариатора, а на вал 14 генератора 15 в зависимости от нагрузки на ведомом валу вариатора передается от 0 до 25% мощности приводного двигателя.
которое обеспечивает передачу большей части мощности от приводного двигателя с ведущего вала 1 на ведомый вал 20 вариатора, а на вал 14 генератора 15 в зависимости от нагрузки на ведомом валу вариатора передается от 0 до 25% мощности приводного двигателя.
Большие моменты на ведомом валу вариатора, уменьшающиеся по мере разгона транспортного средства, требуются тогда, когда действуют силы инерции при разгоне транспортного средства или при движении на подъем. При этом увеличение частоты вращения ведомого вала вариатора происходит автоматически по мере уменьшения нагрузки на ведомом валу вариатора.
После разгона транспортного средства генератор останавливается и вся мощность от ведущего вала вариатора полностью передается на ведомый вал. Энергию генератора можно заводить через электродвигатель относительно небольшой мощности и муфту свободного хода снова на ведущий вал вариатора. Так как работа генератора и электродвигателя при разгоне транспортного средства кратковременна, то электрические машины можно делать недоразмеренными, так как они не будут успевать перегреваться.
Используемые приборы при экспериментальных исследованиях:
амперметр постоянного тока М4200, класс точности 1,5, цена деления 0,2А, шкала на 5А для замера тока приводного двигателя;
амперметр постоянного тока М4200, класс точности 1,5, цена деления 25 МА для замера величины тока генератора;
вольтметр постоянного тока Ц4313, класс точности 1,5, шкала 30В для замера напряжения генератора;
вольтметр постоянного тока М42100 на 30В, класс точности 1,5 для замера питающего напряжения приводного двигателя;
измеритель оборотов ИО-30 N44014, цена деления 2 об/м.
В качестве приводного двигателя использовался электромеханизм МУФ-8 постоянного тока с выходной мощностью 10ВТ и напряжением питания 27В ± 10% в качестве генератора электромеханизм МН-250 постоянного тока с выходной мощностью 2,9 Вт и напряжением питания 27B ± 10%
В качестве нагрузочного устройства использовался барабан радиусом R 31 мм 0,031 м и различные грузы массой до 18 кг.
В эксперименте использовались дифференциальные механизмы с одинаковыми диаметрами начальных окружностей солнечных колес и сателлитов, следовательно передаточное отношение i 4. Соответственно и передаточное отношение (оптимальное) планетарной связи между коронами К1 и К2 дифференциальных механизмов выбрано следующим образом
4. Соответственно и передаточное отношение (оптимальное) планетарной связи между коронами К1 и К2 дифференциальных механизмов выбрано следующим образом
i =
= 
 ≈ 4.
≈ 4.
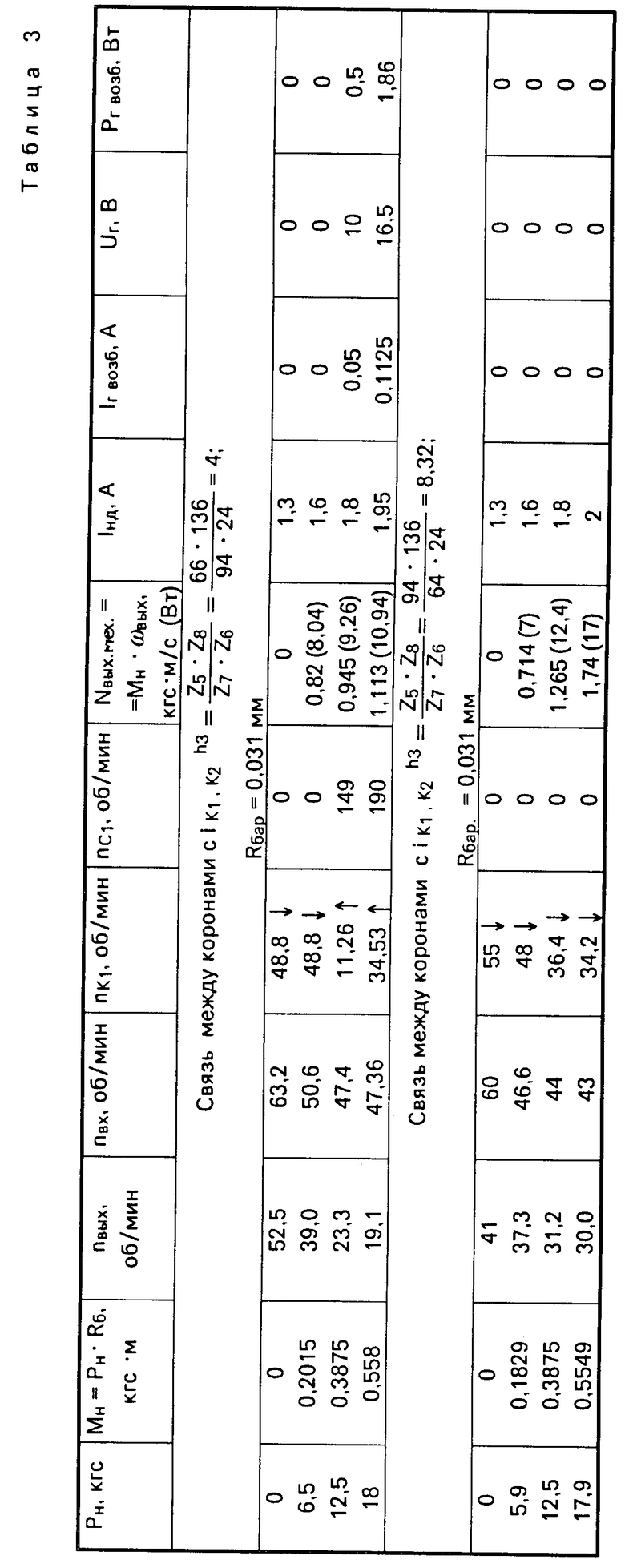
Результаты измерений при различных значениях передаточного отношения i сведены в табл. 1 3.
сведены в табл. 1 3.
Графики функций nвх f1 (Мн), nвых f2 (Мн), iвар f3 (Мн), Nвых.мех f4 (Мн) и Рэл.г f5 (Мн) на фиг. 3 построены в относительных единицах на основании экспериментальных данных.
Из анализа экспериментальных данных следует, что по мере уменьшения передаточного отношения i относительно оптимального, характеристика вариатора nвых f (Мн) становится "мягче" (см. кривые на фиг. 4). Кривая 1 показывает изменение частоты вращения ведомого вала механизма без планетарной связи между коронами К1 и К2; кривая 2 мощность, передаваемую механизмом без связи между коронами К1 и К2 при прочих равных условиях, т.е. те же дифференциальные механизмы, приводной двигатель, генератор и нагрузочный барабан (см. табл. 1); кривая 4 изменение частоты вращения ведомого вала 20 вариатора при передаточном отношении i
относительно оптимального, характеристика вариатора nвых f (Мн) становится "мягче" (см. кривые на фиг. 4). Кривая 1 показывает изменение частоты вращения ведомого вала механизма без планетарной связи между коронами К1 и К2; кривая 2 мощность, передаваемую механизмом без связи между коронами К1 и К2 при прочих равных условиях, т.е. те же дифференциальные механизмы, приводной двигатель, генератор и нагрузочный барабан (см. табл. 1); кривая 4 изменение частоты вращения ведомого вала 20 вариатора при передаточном отношении i 2,33 и изменении момента нагрузки; кривая 3 возможную передаваемую механизмом мощность при i
2,33 и изменении момента нагрузки; кривая 3 возможную передаваемую механизмом мощность при i 2,33 (см. табл. 1); кривые 5 и 6 те же зависимости, но при i
2,33 (см. табл. 1); кривые 5 и 6 те же зависимости, но при i = 3,11 (см. табл. 2).
= 3,11 (см. табл. 2).
В табл. 2 приведены данные и для i 3,858. На фиг. 4 эти зависимости не показаны, но они близки к данным для i
3,858. На фиг. 4 эти зависимости не показаны, но они близки к данным для i 4.
4.
При увеличении i выше оптимального значения характеристика вариатора nвых f (Мн) становится жестче и может достигать значений, когда варьирования частоты вращения ведомого вала не происходит. Например, сравните на фиг. 4 кривую nвх f1 (Мн) и кривую 7, соответствующую i
выше оптимального значения характеристика вариатора nвых f (Мн) становится жестче и может достигать значений, когда варьирования частоты вращения ведомого вала не происходит. Например, сравните на фиг. 4 кривую nвх f1 (Мн) и кривую 7, соответствующую i = 8,32. Они эквидистантны, генератор в работе вариатора не участвует, варьирования передаточного отношения вариатора не происходит (см. табл. 3).
= 8,32. Они эквидистантны, генератор в работе вариатора не участвует, варьирования передаточного отношения вариатора не происходит (см. табл. 3).
С точки зрения КПД один из дифференциальных механизмов можно отнести к варианту Аhba (ориентировочный КПД равен 0,99), а другой к варианту Abah (ориентировочный КПД 0,98).
В режиме прямой передачи, когда планетарная связь практически не работает, а короны К1 и К2 вращаются примерно синхронно (генератор при этом стоит). КПД вариатора определяется: КПДвар 0,99 . 0,980,97.
В режиме разгона транспортного средства ориентировочный КПД вариатора будет определяться двумя потоками мощности: первый до 75% мощности приводного двигателя будет передаваться с КПД, определенном выше и равном 0,97. Второй поток мощности до 25% от мощности приводного двигателя будет передаваться по каналу генератор двигатель, КПД которых следует считать 0,9 для каждого. Тогда КПД вариатора при максимальном передаточном отношении будет определяться: 75% мощности будет иметь потерь 0,03; 25% мощности потерь 1-0,9 ˙ 0,90,19.
Общие потери определяются:
0,75 ˙ 0,03 + 0,25 ˙ 0,19
0,0225 + 0,0475 0,07. КПД вариатора при разгоне транспортного средства (когда задействован канал генератор двигатель) будет не хуже 1 0,07 0,93.
Надежность предлагаемого вариатора будет выше, чем у гидромеханической передачи, так как его конструкция проста и содержит малое количество элементов, а именно зубчатых колес и подшипников, интенсивность отказов которых в единицу времени мала в отличие от гидромеханической передачи, также являющейся трансформатором момента, где имеются три лопаточных колеса, фрикционы, коробка передач, насосы и ряд механических элементов. Система гидропередачи требует высокой степени герметичности.
Экономия топлива достигается за счет того, что разгон транспортного средства производится при полной мощности двигателя и более полном его сгорании, следовательно быстрее примерно в 3 4 раза (см. фиг. 6), чем при разгоне с помощью ступенчатой коробки передач или с помощью гидропередачи, где средняя мощность двигателя в 2 3 раза меньше располагаемой мощности двигателя, а переключения коробки передач ведут к повышенному расходу топлива при разгоне и плохому его сгоранию, что в свою очередь ведет к выбросу в атмосферу большого количества вредных выхлопных газов.
Кроме того, так как при предлагаемом вариаторе используется полная мощность двигателя, а при коробке передач или гидропередаче лишь часть располагаемой мощности двигателя (примерно 40%), то мощность двигателя может быть значительно снижена, что в свою очередь ведет к уменьшению расхода топлива и массы двигателя.
Упрощение управления транспортным средством достигается за счет того, что при коробке передач для его разгона требуется девятнадцать различных действий водителя, в то время как для разгона транспортного средства с помощью предлагаемого вариатора требуется только отжать сцепление, включить передний ход, нажать педаль газа (сразу до упора) и отпустить сцепление (итого четыре движения). Дальнейший разгон транспортного средства будет производиться автоматически и плавно.
Рычаг переключения должен иметь три положения: передний ход, задний ход и нейтраль.
Отсутствие частых переключений коробки передач ведет к улучшению динамики работы двигателя и трансмиссии, а это в свою очередь увеличивает их ресурс.
Кроме того, предлагаемый вариатор повышает ресурс тормозной системы транспортного средства, так как появляется возможность плавного торможения двигателем при сбросе подачи в него топлива.

Использование: машиностроение. Сущность изобретения: вариатор содержит приводной двигатель, генератор, два дифференциальных механизма и объединяющую последние планетарную зубчатую связь с определенным передаточным отношением. Мощность генератора составляет часть мощности приводного двигателя. 5 ил. 3 табл.
Саморегулируемый голономный бесступенчатый вариатор непрерывного действия, содержащий ведущий и ведомый валы, отличающийся тем, что он содержит два дифференциальных механизма, один из одноименных звеньев которых, включающих звено, связанное с ведомым валом вариатора, объединены между собой планетарной зубчатой связью с определенным передаточным отношением, с водилом которой связан приводной двигатель, другие одноименные звенья жестко связаны между собой, одно из третьих одноименных звеньев жестко соединено со стойкой, а другое такое звено соединено с валом генератора, мощность которого составляет лишь часть мощности приводного двигателя.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Мазалов Н.Д | |||
| и др | |||
| Гидромеханические коробки передач | |||
| М.: Машиностроение, 1971, с.153-157. | |||

