Изобретение относится к измерительной технике и может быть использовано для высокоточных угловых измерений в прикладной геодезии, машиностроении и приборостроении.
Известен метод контроля малых угловых наклонов относительно горизонта, использующий муаровый эффект при двойном отражении света от зеркала, помещенного на поверхности поплавка [1] Недостатками данного метода и устройства его реализации являются сложность конструкции жидкостной кюветы, в том числе необходимость крепления поплавка, неоднозначность расшифровки муаровой картины, что снижает чувствительность измерений углов наклона и практически сводит использование такого устройства к нуль-индикации горизонтального положения контролируемого объекта.
Наиболее близким по своей технической сущности к изобретению является устройство для дистанционного измерения углов поворота объектов, использующее в качестве информации об угле поворота интерференционную картину, формируемую при двойной дифракции лазерного излучения на дифракционной решетке, установленной перед нерасстраиваемым уголковым отражателем [2]
Недостатками данного метода и устройства является необходимость прецизионного изготовления дифракционной решетки, отсутствие учета длины хода лазерного излучения в призме между двумя последовательными дифракциями света на решетке, а также энергетических соотношений в распределении дифракционно-интерференционной картины при ее анализе, что значительно снижает точность угловых измерений. Кроме того, использование уголкового отражателя с тремя отражательными гранями, ориентация которых в пространстве не определена, вносит неоднозначность в результат измерений, так как вклад разворотов объекта по двум угловым координатам может привести к одинаковым изменениям распределения интенсивности света в плоскости анализа.
Целью изобретения является повышение точности измерений угловых поворотов за счет упрощения конструкции дифракционного элемента, учета изменений анализируемой интерференционно-дифракционной картины и анализа в области нулевого максимума дифракции, что позволяет значительно увеличить отношение сигнал/шум.
Цель достигается тем, что в устройстве, содержащем последовательно расположенный лазер, коллиматор, дифракционный элемент, нерасстраиваемый отражатель, фоторегистрирующее устройство и блок обработки информации, дифракционный элемент выполнен в виде цилиндра, жестко связанного с нерасстраиваемым отражателем в виде двух плоских зеркал, расположенных под углом θ друг к другу, причем ось цилиндра и отражающие плоскости зеркал параллельны друг другу, цилиндр жестко закреплен на фиксированном расстоянии от одного из зеркал, а оптическая ось фоторегистрирующего устройства установлена под углом π 2 θ к направлению излучения лазера.
Учет асимметрии дифракционно-интерференционной картины, выраженный аналитическим выражением для вычисления угла поворота контролируемого объекта, а также конструктивное выполнение дифракционного элемента в виде одного тонкого цилиндра, жестко закрепленного на настраиваемом отражателе, выполненного в виде двух плоских зеркал, позволяет повысить точность и достоверность измерения углового поворота. Таким образом техническое решение соответствует критерию "Изобретательский уровень".
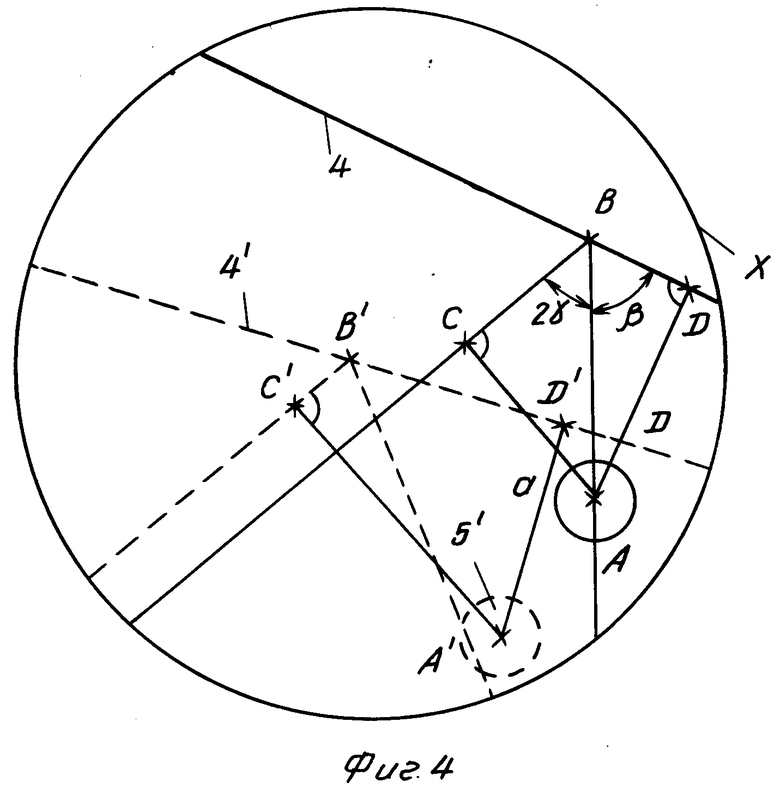
На фиг.1 показана схема измерений, поясняющая способ контроля малых угловых поворотов; на фиг. 2 представлена схема устройства для реализации способа; на фиг.3 показана принципиальная схема двойной дифракции света на дифракционном цилиндре и отражений от плоских зеркал отражателя; на фиг.4 схема дифракции лазерного пучка.
Способ измерений заключается в направлении параллельного лазерного пучка на дифракционный элемент, закрепленный на контролируемом объекте, двойной дифракции света на дифракционном элементе, формировании дифракционно-интерференционной картины, анализе положения максимумов интерференции света и вычислении угла поворота контролируемого объекта.
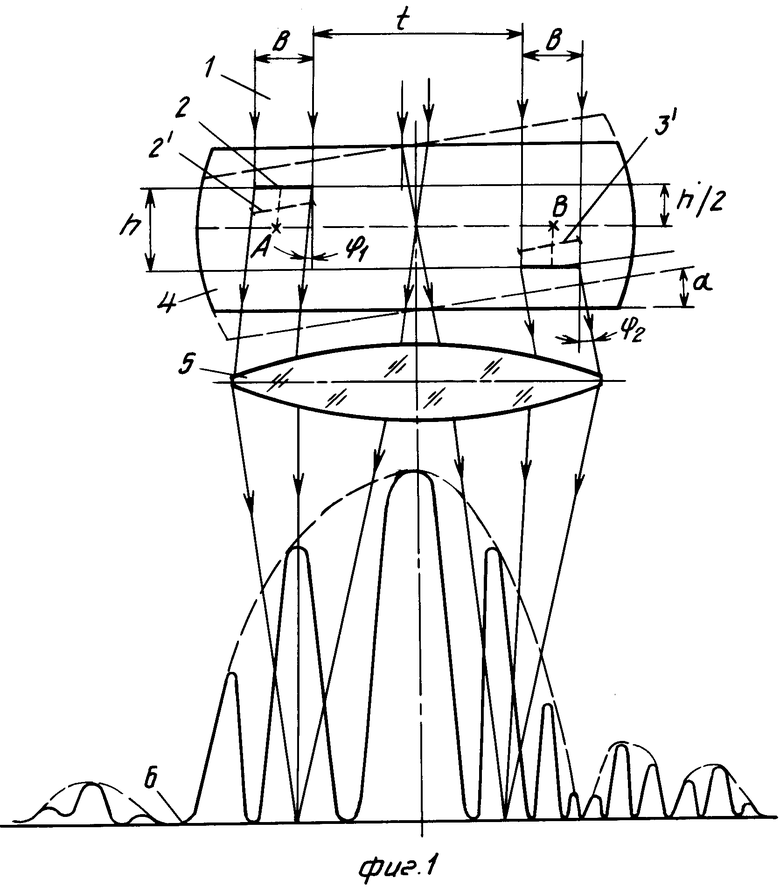
Лазерный пучок 1 (фиг.1) направляют на дифракционный элемент, состоящий из двух идентичных непрозрачных экранов 2 и 3, жестко закрепленных на контролируемом объекте 4. Экраны 2 и 3 должны иметь одинаковую ширину b, и один из экранов смещен относительно другого в направлении распространения света на фиксированную величину h и в перпендикулярном направлении на фиксированную величину t, причем t должно быть в несколько раз больше ширины экрана b.
При нормальном расположении контролируемого объекта 4 дифракционные экраны 2 и 3 расположены перпендикулярно направлению лазерного пучка 1. При небольшом повороте контролируемого объекта 4 вокруг оси, перпендикулярной плоскости чертежа, на угол α (α < 0,1 рад) экраны занимают положения 2' и 3'.
При нормальном положении экранов 2 и 3 световая волна последовательно дифрагирует на экране 2, а затем на экране 3. При этом наблюдается модифицированная схема интерферометра Юнга, у которого вместо щелей в качестве дифрагирующих элементов, согласно принципу Бабине, могут быть использованы непрозрачные экраны. Отличие заключается в том, что один из экранов смещен относительного другого вдоль направления распространения света на величину h. В результате совокупное расстояние между центрами двух дифракционных элементов для разных углов дифракции ϕ будет различным, что приводит к искажению результирующей интерференционной картины, промодулированной дифракцией, формируемой объективом 5 в плоскости 6 анализа.
Если для плоского варианта опыта Юнга условие минимумов интерференции описывается известным выражением
d ˙sin ϕ m λ m ± 1,2,3. (1) где d расстояние между центрами дифракционных элементов;
λ длина волны излучения;
ϕ угол дифракции, то на фиг.1 показана явная асимметрия левой и правой частей дифракционной картины, вызываемая вариацией величины d для каждого конкретного угла дифракции, что в общем случае позволяет получить условие максимумов интерференции с учетом угла в виде
(b+t)sinϕ+2hsin mλ, (2) (2) где b ширина экранов 2 и 3; h расстояние между экранами вдоль направления распространения света; t расстояние между экранами в поперечном направлении. На фиг.1 знак угла дифракции ϕ обозначен для левой части "+", а для правой "-".
mλ, (2) (2) где b ширина экранов 2 и 3; h расстояние между экранами вдоль направления распространения света; t расстояние между экранами в поперечном направлении. На фиг.1 знак угла дифракции ϕ обозначен для левой части "+", а для правой "-".
Левая часть полученного выражения является средним значением расстояния между центрами дифракционных экранов для конкретного угла ϕ и обозначена на фиг.1 отрезком АВ.
В случае углового поворота контролируемого объекта 4 на угол α условие максимумов (2) преобразуется к виду (
( × (3)
× (3)
С учетом малости угла α (< 0,1 рад) полученное выражение можно преобразовать к виду b+t+
b+t+ 
 + ha
+ ha mλ (4) откуда угол поворота определяется в виде
mλ (4) откуда угол поворота определяется в виде
α  -b-t+
-b-t+  h·sin
h·sin /
/ +h
+h (5)
(5)
Вычисление угла α может быть произведено по формуле (5) или по формуле (3). В последнем случае для этого производятся итерационные вычисления с задаваемой погрешностью.
Как видно из полученного выражения, расстояние h между двумя дифракционными элементами вдоль направления распространения света оказывает существенное влияние на результат измерения угла α и должно быть зафиксированным с известным с высокой степенью достоверности изображением существенных погрешностей измерений. В целом влияние постоянных величин b,t и h на точность измерений достаточно просто учитывается как систематическая погрешность при градуировке.
Таким образом измерение угла поворота объекта на угол α сводится к определению угловой координаты ϕ произвольного максимума интерференционной картины. Так как внутри главного максимума дифракции содержится несколько максимумов интерференции N  , где d расстояние между центрами дифракционных экранов, то, учитывая благоприятное энергетическое распределение, следует измерять координаты одного из максимумов интерференции низкого порядка m ≈ 1,2, что позволяет значительно повысить отношение сигнал/шум при анализе интерференционной картины
, где d расстояние между центрами дифракционных экранов, то, учитывая благоприятное энергетическое распределение, следует измерять координаты одного из максимумов интерференции низкого порядка m ≈ 1,2, что позволяет значительно повысить отношение сигнал/шум при анализе интерференционной картины
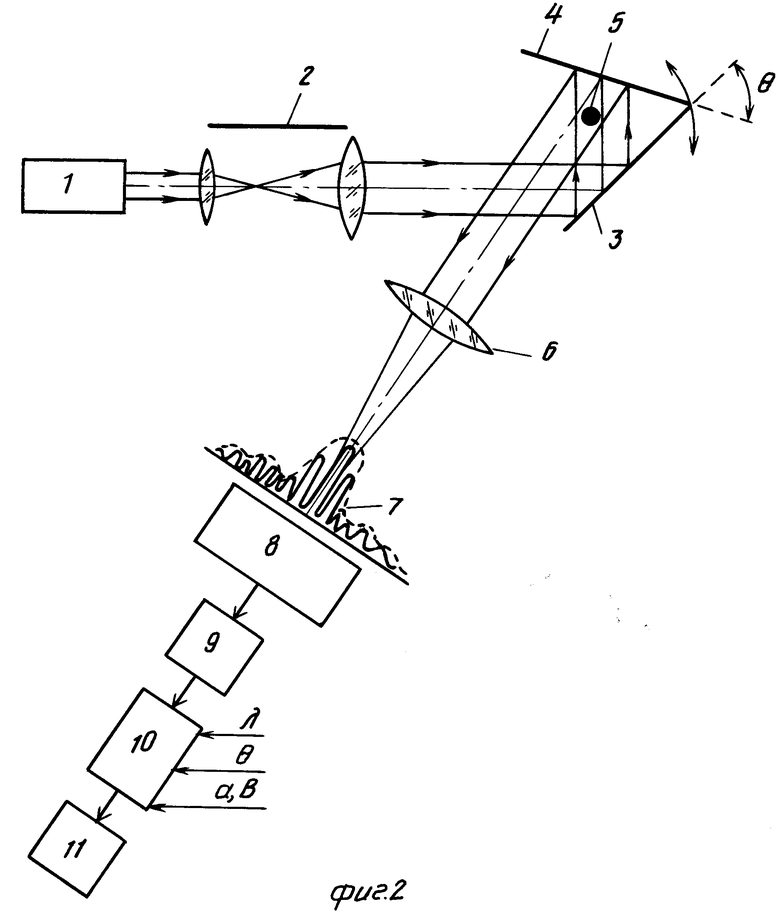
Схема устройства приведена на фиг.2. Устройство состоит из последовательно расположенных лазера 1, коллиматора 2, нерасстраиваемого отражателя, состоящего из двух плоских зеркал 3, 4, жестко закрепленных на контролируемом объекте под углом θ друг другу, дифракционного элемента 5, выполненного в виде тонкого цилиндра, жестко связанного с нерасстраиваемым отражателем, и расположенного на фиксированном расстоянии а от отражающей поверхности второго плоского зеркала, а также регистрирующего фотоэлектрического устройства, состоящего из объектива 6, оптическая ось которого составляет угол π 2θ с оптической осью коллиматора 2, фотоприемника 8, расположенного в задней фокальной плоскости объектива 6, связанного с блоком 9 обработки видеосигнала, и последовательно соединенных вычислительного устройства 10 и индикатора 11 угла поворота.
Устройство работает следующим образом. Лазерный пучок направляется коллиматором 2 на нерасстраиваемый отражатель, жестко закрепленный на контролируемом объекте. Первое зеркало 3 отражателя направляет лазерный пучок на дифракционный элемент 5, на котором происходит первичная дифракция световой волны. Затем лазерный пучок отражается от поверхности второго зеркала 4 отражателя, световая волна вторично дифрагирует на дифракционном элементе 5 и направляется в объектив 6 фотоприемного устройства. Объектив 6 формирует в задней фокальной плоскости результирующую дифракционно-интерференционную картину. Там же установлен фотоприемник 8 (например, ПЗС-линейка), преобразующий распределение интенсивности света в электрические сигналы, направляемые в блок 9 обработки сигналов, связанный с вычислительным устройством 10, которое производит вычисление угла поворота α и направляет результат в цифровом коде на регистратор 11 (цифровое табло либо цифропечатающее устройство).
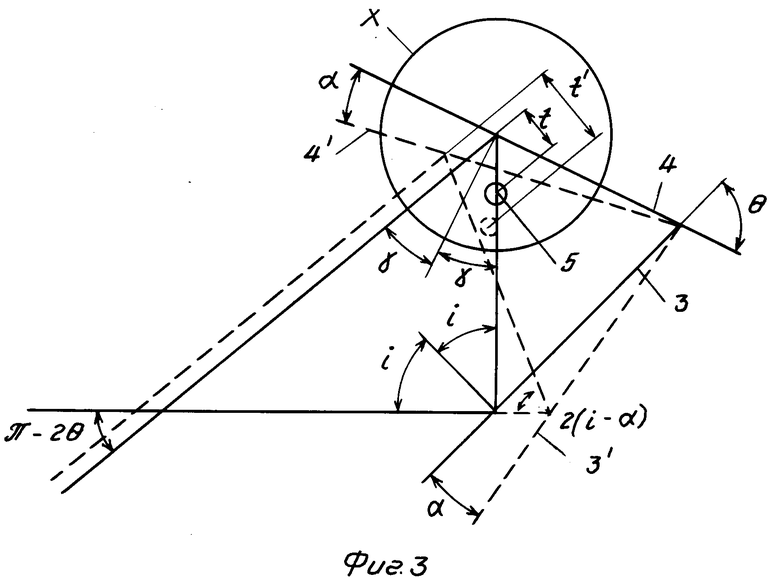
На фиг.3 показана схема двойной дифракции лазерного пучка на дифракционном цилиндре 5. Как показано ниже, оптимальной является такая первоначальная установка отражателя 3,4, при которой угол падения i лазерного пучка на первое зеркало равняется углу θ расположения зеркал относительно друг друга. После дифракции на цилиндре 5 лазерный пучок отражается от второго зеркала 4 под углом γ затем вторично дифрагирует на цилиндре 5 и направляется под углом π 2θ к первоначальному направлению в объектив 6 фотоприемного устройства.
Рассмотрим два треугольника ABD и ABC на фиг.4, образованных центром цилиндра 5 (т. А), нормалью, опущенной из т. А на поверхность второго зеркала AD a (где а фиксированная величина), точкой падения оси лазерного пучка на поверхность второго зеркала 4 отражателя (т. В) и изображением центра цилиндра после отражения лазерного пучка от поверхности зеркала 4 (т. С).
Определим величины t и h, характеризующие отрезки между точками А и С, и оптическую длину пути света между двумя плоскостями дифракции h AВ + BC; t AC (6)
Из треугольников ABD и ABC находим
AB  BC
BC  AC
AC  (7) где β 90 -θ + i и γ θ i (8)
(7) где β 90 -θ + i и γ θ i (8)
При повороте контролируемого объекта вокруг оси, перпендикулярной плоскости чертежа, отражатель 3, 4 вместе с дифракционным цилиндром 5 повернется на угол α (на фиг.3 элементы показаны штриховыми линиями). Это приводит к изменению углов падения и отражения на зеркалах 3, 4 отражателя, а также к изменению величин h и t, выражающихся отрезками
h A'B' + B'C'; t A'C' (9)
A′B′  B′C′
B′C′  A′C′
A′C′  (10)
(10)
β' 90o θ + (i ± α) и γ θ (1 ± α) (11)
Пoдставив (11) в (10) и соответственно в (9), после преобразования получим
h 2a ˙ cos [ θ i ± α] и
t 2 a ˙ sin [ θ i ± α (12)
Подставив полученные выражения в условие максимумов интерференции на пространственно разнесенных экранах (равенство (2)), получим
(b+2asin[θ-i ± α])sinϕ+4acos[θ-i ± α]sin mλ (13)
mλ (13)
Из выражения (13) величина угла поворота α может быть найдена при помощи итераций. Для упрощения вычислительного алгоритма определения α необходимо первоначально установить отражатель 3, 4 так, чтобы угол падения i лазерного пучка на первое зеркало 3 отражателя равнялся углу расположения зеркал друг к другу θ В этом случае равенство (13) принимает вид
(b+2a·sinα)sinϕ+4acosα·sin2 mλ (14)
mλ (14)
После преобразований окончательно получим выражение для определения угла поворота отражателя α
α arcsin  -ϕ/2 (15)
-ϕ/2 (15)
Из данного выражения видно, что при известных постоянных величинах λ b и а процесс вычисления α сводится к определению угловой координаты ϕ произвольного максимума интерференции, расположенного внутри главного дифракционного максимума. Поэтому значения постоянных величин λ b, а и θ предварительно вводятся в вычислительный блок фоторегистрирующего устройства 10 (фиг.2).
Проведенные экспериментальные исследования, в которых в качестве дифракционных экранов использовались два отрезка тонкой проволоки диаметром 50 мкм, показали высокую надежность и точность предлагаемого метода измерений. При этом погрешность измерения угла поворота α составила 0,2 угл.с в диапазоне 6о.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ ПОВОРОТА НЕСКОЛЬКИХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2075727C1 |
| УСТРОЙСТВО НЕПРЕРЫВНОГО КОНТРОЛЯ ПАРАМЕТРОВ ШЕСТИГРАННОГО ВОЛОКОННО-ОПТИЧЕСКОГО СТЕРЖНЯ ВО ВРЕМЯ ВЫТЯЖКИ | 1992 |
|
RU2020410C1 |
| СПОСОБ ГЕОДЕЗИЧЕСКИХ ИЗМЕРЕНИЙ ОБЪЕМНЫХ ОБЪЕКТОВ ПО ЗАДАННЫМ СВЕТОВЫМ МАРКАМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2079810C1 |
| Лазерный створный измеритель | 1987 |
|
SU1543225A1 |
| Устройство для измерения линейных смещений | 1986 |
|
SU1350488A1 |
| Устройство для задания опорной световой плоскости | 1987 |
|
SU1493869A1 |
| Способ определения линейных перемещений объекта | 1987 |
|
SU1415052A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАДИУСОВ КРИВИЗНЫ ПОВЕРХНОСТИ ДЕТАЛИ | 1991 |
|
RU2006792C1 |
| Интерференционный способ измеренияРАССТОяНий | 1977 |
|
SU700027A1 |
| Способ определения изменений угловой координаты объекта в плоскости и устройство для его осуществления | 1984 |
|
SU1290063A1 |
Использование: в геодезии для применения в высокоточных угловых измерениях. Сущность изобретения: устройство контроля малых угловых поворотов включает лазер, коллиматор, нерастраиваемый отражатель, дифракционный элемент в виде цилиндров и регистрирующее фотоэлектрическое устройство. Лазерный пучок, отражаясь от зеркал нерасстраиваемого отражателя, дважды дифрагирует на дифракционном элементе, создавая дифракционно-интерференционную картину, имеющую в общем случае асимметрию левой и правой частей. По расположению максимумов интерференционной картины вычисляют величину углового поворота. 4 ил.
УСТРОЙСТВО ДЛЯ КОНТРОЛЯ МАЛЫХ УГЛОВЫХ ПОВОРОТОВ, содержащее последовательно расположенные лазер, коллиматор, дифракционный элемент, нерастраиваемый отражатель, фоторегистрирующее устройство и блок обработки информации, отличающееся тем, что дифракционный элемент выполнен в виде цилиндра, жестко связанного с нерасстраиваемым отражателем в виде двух плоских зеркал, расположенных под углом θ друг к другу, причем ось цилиндра и отражающие плоскости зеркал параллельны друг другу, цилиндр жестко закреплен на фиксированном расстоянии от одного из зеркал, а оптическая ось фоторегистрирующего устройства установлена под углом p-2θ к направлению излучения лазера.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для дистанционного измерения углов поворота объектов | 1972 |
|
SU444053A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
