Изобретение относится к электроракетной технике и может быть использовано в системах преобразования и управления электроракетными двигателями для стабилизации тяги двигателя, а также в плазменных ускорительных и генераторных установках.
Известен способ стабилизации тяги электроракетного плазменного двигателя типа СПД [1] заключающийся в том, что одновременно стабилизируют ускоряющее анодное напряжение двигателя и его анодный ток. Стабилизацию последнего обеспечивают изменением секундного расхода рабочего вещества с помощью термодросселя или электроклапанов по сигналу с датчика анодного тока, который пропорционален расходу рабочего вещества, благодаря чему поддержанием стабильности анодного тока стабилизируют секундный расход рабочего вещества. Этот способ отличается логической простотой решения задачи стабилизации тяги двигателя, заключающейся в том, что, поскольку тяга двигателя является функцией двух аргументов (параметров) напряжения анода и тока анода, то при одновременной стабилизации каждого из параметров автоматически получается стабильность и тяга двигателя.
Недостатками этого способа являются сложность его реализации, поскольку приходится формировать два канала стабилизации по напряжению анода и по секундному расходу рабочего вещества, а также невысокая точность стабилизации тяги двигателя, так как ее абсолютное значение складывается из точности стабилизации тока анода и точности стабилизации напряжения анода. Стремление повысить точность стабилизации тяги требует увеличения точности стабилизации напряжения и тока анода, что приводит к еще большему усложнению системы преобразования и управления двигателя.
Несмотря на указанные недостатки этот способ был единственным и реализованным в существующих двигательных установках.
Известно устройство [2] содержащее стабилизирующий преобразователь анодного напряжения (ПН), датчик разрядного (анодного) тока (ДРТ), усилитель-регулятор (стабилизатор) давления (УРД) в системе подачи рабочего вещества.
Недостаток этого устройства невысокая стабильность тяги двигателя, обусловленная способом поддержания тяги, который реализован в устройстве.
Цель изобретения упрощение системы преобразования и управления электроракетным плазменным двигателем и повышение стабильности тяги двигателя путем сокращения количества каналов стабилизации.
Для этого в способе стабилизации тяги электроракетного плазменного двигателя, включающем изменение расхода рабочего вещества, расход изменяют при меняющихся токе и напряжении анода таким образом, чтобы величина произведения UаIa2 оставалась стабильной во времени, где Ia величина тока, протекающего через анод двигателя; Ua величина анодного напряжения.
В устройстве для осуществления способа стабилизации тяги электроракетного плазменного двигателя, содержащем преобразователь напряжения, вход которого подключен к источнику электропитания, а выходные выводы подключены к электродам двигателя, датчики тока и напряжения, включенные в цепь электропитания двигателя, выходные выводы которых соединены с входами соответствующих усилителей сигналов датчиков, источник эталонного напряжения, подключенный к первому входу блока сравнения, усилитель рассогласования сигналов, вход которого соединен с выходом блока сравнения, а выход с управляемым регулятором подачи рабочего вещества, установленным в тракте подачи рабочего вещества между входом в двигатель и системой хранения рабочего вещества, дополнительно введен перемножитель сигналов, входы которого соединены раздельно с соответствующими выходами усилителей сигналов датчиков тока и напряжения, а выход подключен к второму входу блока сравнения, при этом в качестве усилителя сигнала датчика тока выбран квадратичный усилитель, а в качестве источника эталонного напряжения выбран источник с напряжением, величина которого пропорциональна квадрату расчетного значения тяги двигателя.
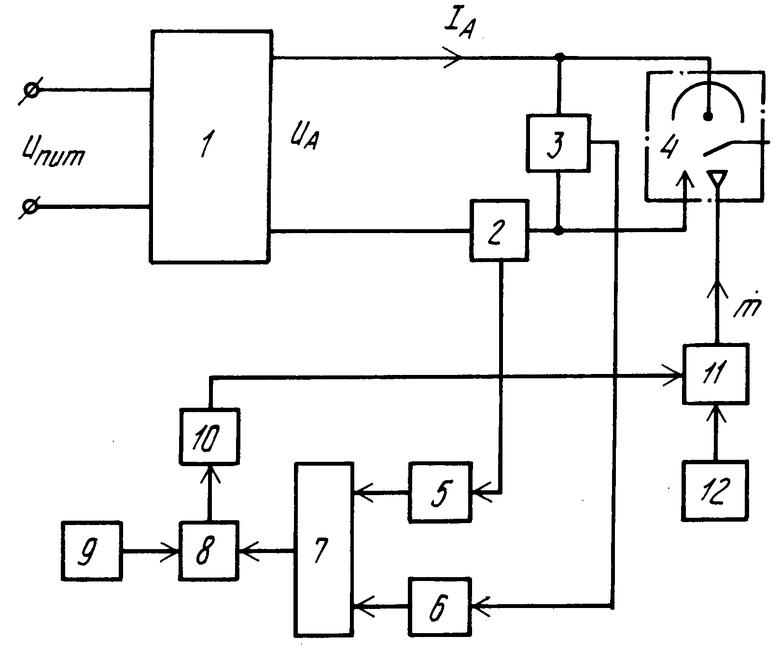
На чертеже показана структурная схема устройства для осуществления предложенного способа стабилизации тяги электроракетного плазменного двигателя, иллюстрирующая способ стабилизации тяги.
Устройство содержит преобразователь 1 напряжения, входные выводы которого подключены к первичному источнику питания Uпит, выходные выводы преобразователя через датчики тока 2 и напряжения 3 подключены к электродам двигателя 4, выводы с датчиков тока и напряжения подключены раздельно к входам усилителей 5 и 6 сигналов, причем в качестве усилителя 5 использован квадратичный усилитель, выходы усилителей подключены к входным выводам перемножителя 7, выход с которого подключен к одному из выходов блока 8 сравнения, а к второму входу которого подключен источник 9 эталонного напряжения (задатчик тяги двигателя), эквивалентного величине квадрата тяги двигателя, помноженной на постоянный коэффициент, к выходу блока сравнения подключен усилитель 10 рассогласования, выход которого подключен к регулятору 11 расхода рабочего вещества исполнительному органу, управляющему расходом  рабочего вещества, в качестве регулятора может быть использован термодроссель или электроклапан, включающий между двигателем и системой 12 хранения рабочего вещества.
рабочего вещества, в качестве регулятора может быть использован термодроссель или электроклапан, включающий между двигателем и системой 12 хранения рабочего вещества.
Сущность способа стабилизации тяги следует из соотношения для тяги электроракетного плазменного двигателя
F=  где Ua и Ia напряжение и ток анода (разряда);
где Ua и Ia напряжение и ток анода (разряда);  - секундный расход рабочего вещества; ηдв тяговый КПД двигателя.
- секундный расход рабочего вещества; ηдв тяговый КПД двигателя.
Поскольку согласно [2] =IaM/αe то тягу двигателя можно представить в следующем виде:
=IaM/αe то тягу двигателя можно представить в следующем виде:
F=I I
I где коэффициент k= αe/2ηдвМ.
где коэффициент k= αe/2ηдвМ.
В формуле для тяги двигателя изменяемыми являются параметры Ua и Iа. Если стабилизировать каждый из них, то тяга F будет также стабильной, что и реализуется на практике в ДУ. Но точность стабилизации тяги при этом ниже, чем точность стабилизации любого из параметров, так как абсолютные погрешности стабилизации двух параметров складываются. Задача стабилизации тяги решается проще, если не стабилизировать каждый из параметров, а менять значение только одного из них (Ia) так, чтобы тяга сохранялась неизменной. Трудность при этом заключается в необходимости извлекать квадратный корень из Ia, что для технической реализации представляет определенную сложность. Гораздо проще осуществить техническими средствами соотношение для тяги двигателя, преобразованное следующим образом:
kF2=Ia2Ua.
Возведение Ia в квадрат просто реализуется с помощью квадратичного усилителя, а значение kF2 задается в виде эталонного (задатчика тяги), с которым сравнивается произведение Ia2Ua. При постоянном коэффициенте k и поддержании неизменным произведения Ia2Ua путем изменения значения одного из сомножителей (Ia2) будет стабильно значение F2, а следовательно, и значение тяги.
Устройство для осуществления предложенного способа работает следующим образом.
При подаче напряжения питания на выходе преобразователя 1 появляется напряжение разряда (анода) Ua, которое прикладывается к электродам двигателя 4, с датчика 3 напряжения сигнал, усиленный усилителем 6, поступает на первый вход перемножителя 7. После запуска (поджига) двигателя в цепи питания двигателя возникает ток разряда (анода) Ia. Сигнал, пропорциональный анодному току, с датчика 2 тока поступает на вход квадратичного усилителя 5, с выхода которого напряжение, пропорциональное Ia2, подается на второй вход перемножителя 7. С выхода перемножителя напряжение, пропорциональное произведению Ia2Ua, поступает на блок 8 сравнения, где сравнивается с эталонным напряжением 9, эквивалентным квадрату тяги двигателя, помноженной на постоянный коэффициент. Если напряжение на выходе перемножителя 7, эквивалентное произведению Ia2Ua, окажется больше или меньше эталонного напряжения, эквивалентного kF2, то на выходе блока сравнения появится напряжение соответствующего знака. Усиленное усилителем 10 напряжение рассогласования через регулирующее устройство 11 воздействует на термодроссель (электроклапан), уменьшая (или увеличивая) секундный расход рабочего вещества, что эквивалентно изменению разрядного тока Ia. В результате произведение Ia2Ua вследствие изменения Ia уменьшается или увеличивается до тех пор, пока не станет равным kF2. Таким образом поддерживается стабильным произведение Ia2Ua и, следовательно, тяга F двигателя.
Предложенные способ стабилизации тяги электроракетного плазменного двигателя и устройство для его осуществления позволяют существенно упростить систему питания и управления плазменным двигателем и повысить точность стабилизации тяги, так как при этом достаточно управлять только одним из параметров анодным током.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ТЯГИ ЭЛЕКТРОРАКЕТНОГО ПЛАЗМЕННОГО ДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2206787C2 |
| Способ электропитания электроракетного плазменного двигателя и устройство для его осуществления | 2001 |
|
RU2220322C2 |
| СПОСОБ СТАБИЛИЗАЦИИ ТЯГИ ЭЛЕКТРОРАКЕТНОГО ПЛАЗМЕННОГО ДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2324841C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ТОКА АНОДА ЭЛЕКТРОРЕАКТИВНОГО ПЛАЗМЕННОГО ДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2339846C2 |
| ИМИТАТОР ЭЛЕКТРОРАКЕТНОЙ ПЛАЗМЕННОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКИ | 2009 |
|
RU2395716C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ МОЩНОСТИ ЭНЕРГОСИЛОВОЙ УСТАНОВКИ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2249546C2 |
| ДИНАМИЧЕСКИЙ ИМИТАТОР СТАЦИОНАРНЫХ ПЛАЗМЕННЫХ ДВИГАТЕЛЕЙ | 2015 |
|
RU2610623C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕРМЕТИЧНОСТИ СИСТЕМЫ ПОДАЧИ РАБОЧЕГО ТЕЛА К ИСТОЧНИКУ ПЛАЗМЫ, ПРЕИМУЩЕСТВЕННО В УСЛОВИЯХ ВАКУУМА | 2008 |
|
RU2377522C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАСХОДА СИСТЕМЫ ПОДАЧИ РАБОЧЕГО ТЕЛА К ИСТОЧНИКУ ПЛАЗМЫ | 2008 |
|
RU2392589C2 |
| СПОСОБ ЗАПУСКА И ЭЛЕКТРОПИТАНИЯ ЭЛЕКТРОРЕАКТИВНОГО ПЛАЗМЕННОГО ДВИГАТЕЛЯ (ЕГО ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ЕГО ВАРИАНТЫ) | 2008 |
|
RU2366123C1 |
Использование: в космической технике, плазменных, ускорительных и генераторных установках. Сущность изобретения: в способе стабилизации тяги электроракетного плазменного двигателя тягу плазменного двигателя, являющуюся функцией двух параметров: напряжения анода и тока анода, пропорционального секундному расходу рабочего вещества, стабилизируют посредством измерения расхода так, чтобы произведение анодного напряжения и квадрата величины тока, протекающего через анод двигателя, оставалось неизменным во времени. Устройство, реализующее способ, содержит только один канал стабилизации, состоящий из датчиков тока и напряжения анода двигателя, двух усилителей сигнала, один из которых квадратичный, перемножителя, сравнивающего устройства, источника эталонного напряжения, величина которого пропорциональна квадрату расчетного значения тяги двигателя, и регулятора подачи рабочего вещества. При использовании изобретения повышается точность стабилизации тяги и упрощается система преобразования и управления двигателя. 2 с. п. ф-лы, 1 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Арцимович Л.А | |||
| и др | |||
| Разработка стационарного плазменного двигателя и его испытания на ИЗС "Метеор" | |||
| Космические исследования, т | |||
| XII, вып.3, 1974, с.456-459, рис.6. | |||
