Изобретение относится к электротехнике, в частности к электромагнитным приводам, в которых якорь, охватываемый статором, совершает прямолинейное движение, и может найти применение в быстродействующих электромагнитных приводах топливных форсунок и в других областях, требующих высоких скоростей срабатывания при достаточно больших рабочих усилиях привода.
Известен электромагнитный привод, содержащий якорь с полюсами в виде внутренних выступов и концентрично размещенный внутри якоря статор с ответными полюсами в виде наружных выступов, имеющих торцовые поверхности, расположенные с осевым зазором относительно ответных торцовых поверхностей полюсов якоря, со стороны, расположенной в направлении рабочего движения якоря. Между полюсами статора размещены обмотки, образующие с полюсами статора элементарные электромагниты с чередующейся полярностью для продольного перемещения якоря относительно статора, при этом проекции полюсов статора на плоскость, перпендикулярную оси привода, частично перекрывают проекции полюсов якоря на ту же плоскость. Этот электромагнитный привод имеет один диаметр по всей длине. Это достигается тем, что якорь и статор выполнены с ответными винтовыми выступами и их обмотки также выполнены по спирали.
Недостатками этого привода является необходимость в предотвращении вращения якоря относительно статора во избежание изменения величины хода и тяговых параметров. С этой целью необходимо использование направляющих поверхностей. Трение по этим поверхностям, вызванное наличием тангенциальных составляющих электромагнитных сил, приводит к дополнительным потерям.
Известен электромагнитный привод, содержащий якорь с полюсами в виде внутренних выступов и концентрично размещенный внутри якоря статор с ответными полюсами в виде наружных выступов, имеющих торцовые поверхности, расположенные с осевым зазором относительно ответных торцовых поверхностей полюсов якоря, со стороны, расположенной в направлении рабочего движения якоря. Между полюсами статора размещены обмотки, образующие с полюсами статора элементарные электромагниты с чередующейся полярностью для продольного перемещения якоря относительно статора, при этом проекции полюсов статора на плоскость, перпендикулярную оси привода, частично перекрывают проекции полюсов якоря на ту же плоскость. Электромагнитный привод имеет конические якорь и статор для обеспечения сборки.
Недостатком этой конструкции является необходимость увеличения диаметра секций электромагнита с целью обеспечения сборки. Это приводит к увеличению массы якоря и снижает быстродействие. Кроме того, увеличение диаметра ведет к росту сопротивления обмоток и повышению тепловых потерь. Введение паразитных короткозамкнутых витков в этой конструкции также увеличивает потери и приводит к снижению быстродействия.
В основу изобретения положена задача создания электромагнитного привода, который может быть легко и просто собран при уменьшении радиального габарита и массы якоря.
При такой конструкции обеспечивается простота сборки при одних и тех же поперечных размерах основных деталей привода в продольном направлении. Это объясняется тем, что сборка производится путем соединения деталей якоря в радиальном направлении. При этом, поскольку нет необходимости в увеличении радиального размера деталей (якоря и статора) вдоль привода, уменьшается масса якоря, что весьма важно с точки зрения быстродействия и потребляемой мощности, а также необходимого охлаждения обмоток. Указанные преимущества (быстродействие и снижение требований к охлаждению) усиливаются благодаря снижению интенсивности вихревых токов в магнитопроводе в результате его выполнения разрезным.
Участок якоря предпочтительно представляет собой упруго податливый в продольном направлении элемент, при этом осевые зазоры между полюсами якоря и статора на каждом последующем участке в направлении рабочего движения якоря меньше, чем на предыдущем участке. При таком устройстве увеличивается суммарный ход якоря. Кроме того, обеспечивается возврат якоря в исходное положение без необходимости в отдельной пружине.
Якорь может быть выполнен разрезным в поперечном направлении, при этом поверхности разреза проведены через середины полюсов якоря. При такой конструкции упрощается изготовление деталей привода и не создается паразитных стыков на пути магнитного потока.
Якорь может быть выполнен в виде отдельных полюсов и по меньшей мере одного соединительного элемента, объединяющего полюса в одно целое. При этом упрощается конструкция якоря.
Якорь может быть выполнен с короткозамкнутыми витками, расположенными со стороны каждого полюса якоря, противоположной зазору. Короткозамкнутые витки создают дополнительную электромагнитную силу.
Соединительные элементы полюсов якоря могут быть выполнены в виде стяжек, при этом короткозамкнутые витки образуют дистанционные элементы, размещенные между полюсами якоря. При этом упрощается изготовление и сборка и обеспечивается совмещение функций короткозамкнутых витков.
При выполнении дистанционных элементов в виде замкнутых в поперечном сечении проставок с пазами в радиальных плоскостях снижаются потери в магнитопроводе.
В торцовых поверхностях полюсов якоря со стороны, противоположной зазорам, могут быть выполнены пазы, и короткозамкнутые витки по меньшей мере частично входят в эти пазы, при этом якорь имеет по меньшей мере два продольных фиксатора с выступами, а расстояние между соседними выступами фиксатора соответствует расстоянию между короткозамкнутыми витками. При этом упирается сборка и сокращаются габариты благодаря совмещению функций короткозамкнутых витков.
Целесообразно разделить якорь в продольном направлении по меньшей мере на два отдельных модуля, соединенных друг с другом с образованием между ними зазорами в осевом направлении, при этом осевые зазоры в каждом последующем модуле в порядке включения в работу больше, чем в предыдущем. При такой конструкции обеспечивается увеличение хода якоря и появляется возможность ступенчатого управления рабочим движением привода.
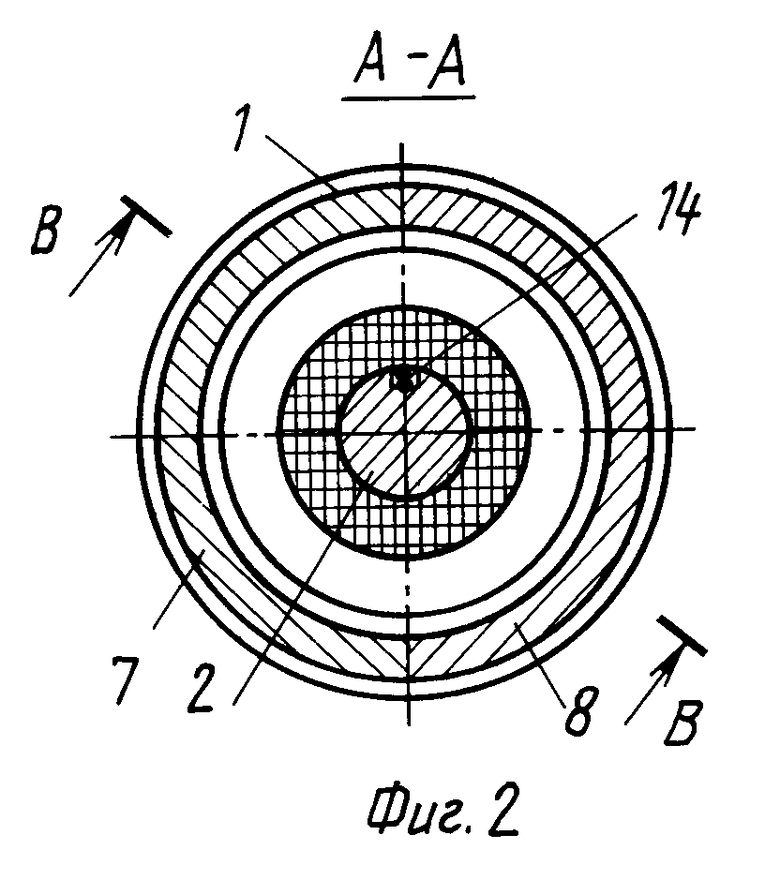
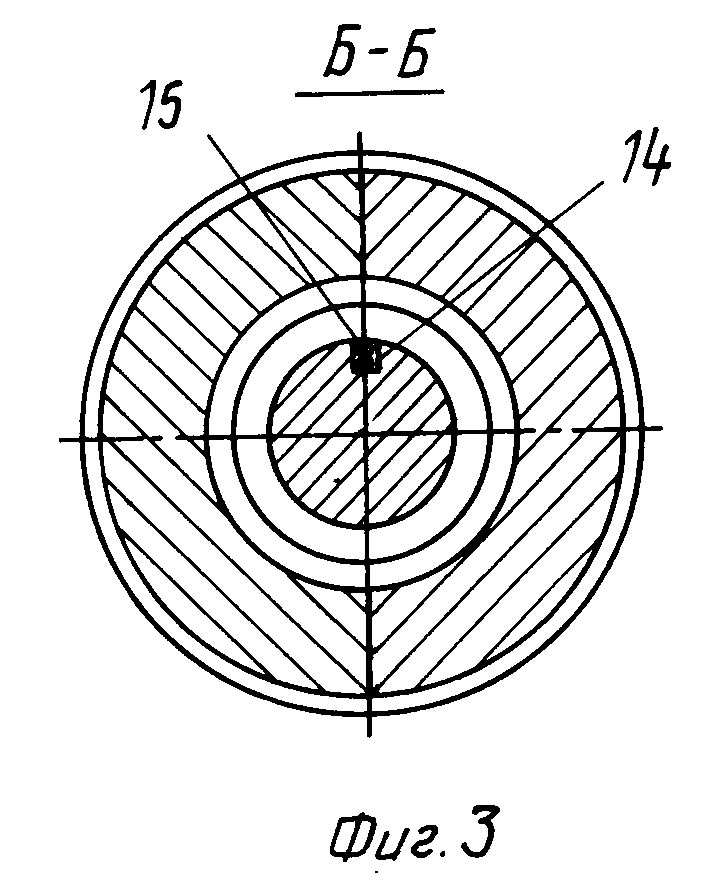
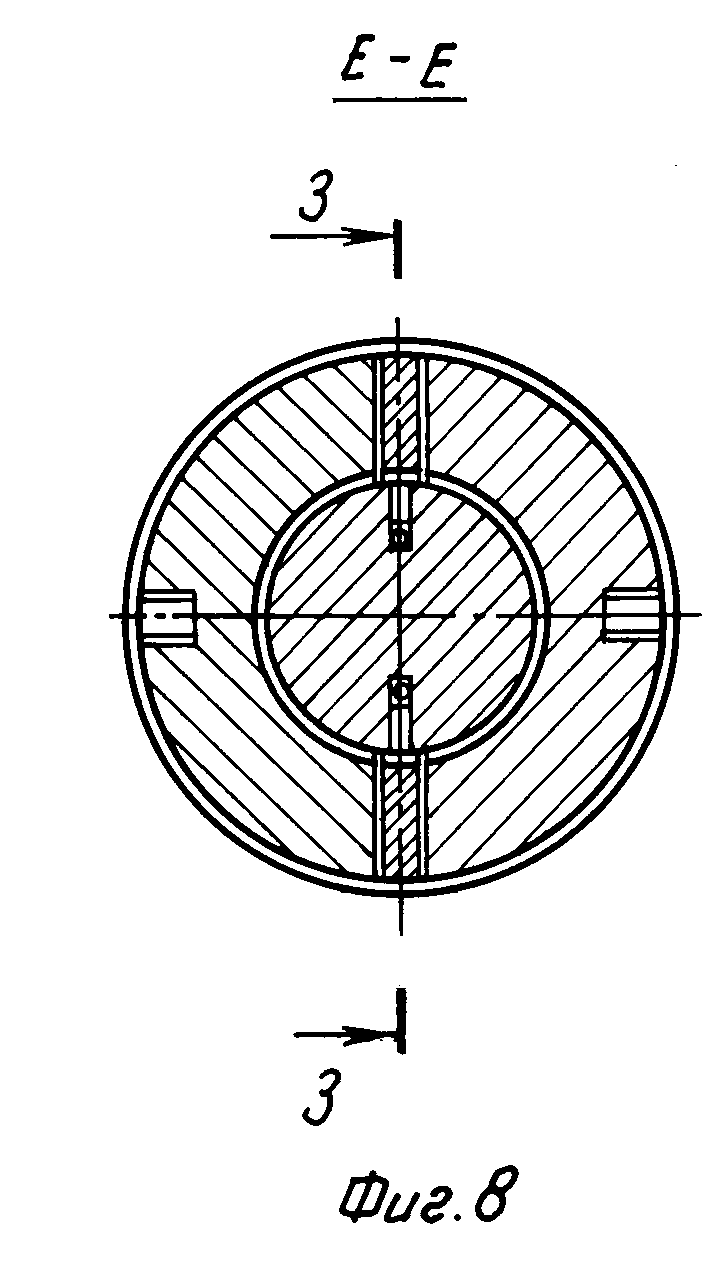
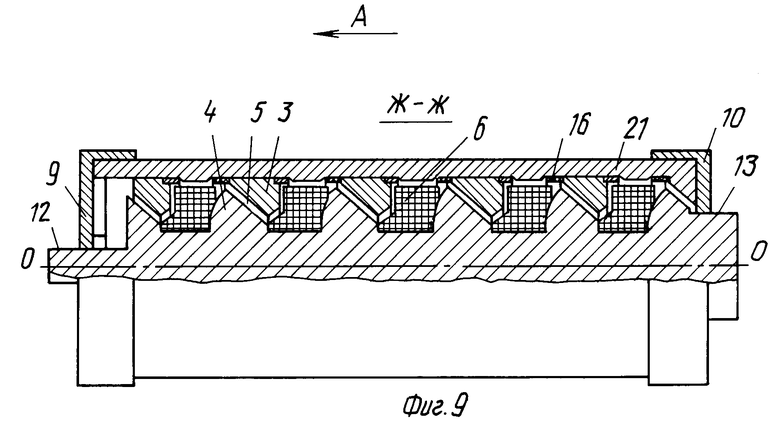
На фиг. 1 представлен предлагаемый электромагнитный привод, продольный разрез; на фиг. 2 разрез А-А на фиг. 1; на фиг. 3 разрез Б-Б на фиг. 1; на фиг. 4 разрез В-В на фиг. 2; на фиг. 5 вариант предлагаемого электромагнитного привода, продольный разрез; на фиг. 6 разрез Г-Г на фиг. 5; на фиг. 7 разрез Д-д на фиг. 5; на фиг. 8 разрез Е-Е на фиг. 5; на фиг. 9 разрез Ж-Ж на фиг. 7; на фиг. 10 разрез З-З на фиг. 8; на фиг. 11 третий вариант предлагаемого электромагнитного привода, продольный разрез; на фиг. 12 разрез И-И на фиг. 11; на фиг. 13 четвертый вариант предлагаемого электромагнитного привода, продольный разрез; на фиг. 14 разрез К-К на фиг. 13; на фиг. 15 разрез Л-Л на фиг. 13; на фиг. 16 разрез М-М на фиг. 13; на фиг. 17 пятый вариант предлагаемого электромагнитного привода, продольный разрез; на фиг. 18 разрез Н-Н на фиг. 17; на фиг. 19 разрез О-О на фиг. 18; на фиг. 20 шестой вариант предлагаемого электромагнитного привода, продольный разрез; на фиг. 21 разрез П-П на фиг. 20; на фиг. 22 седьмой вариант предлагаемого электромагнитного привода, продольный разрез; на фиг. 23 разрез Р-Р на фиг. 22.
Электромагнитный привод (фиг. 1 и 2) имеет якорь 1 и статор 2, размещенные концентрично, при этом якорь 1 охватывает статор 2. Якорь 1 имеет полюса 3 в виде внутренних выступов. Статор 2 выполнен с ответными полюсами 4 в виде наружных выступов, имеющих торцовые поверхности (не обозначены), расположенные с осевым зазором 5 относительно ответных торцовых поверхностей полюсов 3 якоря 1, со стороны, расположенной в направлении рабочего движения якоря. Между полюсами 4 статора 2 размещены обмотки 6, образующие с полюсами 4 статора 2 и элементарные электромагниты с чередующейся полярностью для продольного перемещения якоря 1 относительно статора 2. Проекция полюсов 4 статора 2 на плоскость, перпендикулярную оси ОО привода, частично перекрывают проекции полюсов якоря на ту же плоскость. Практически это означает, что наружные размеры полюсов 4 статора 2 больше внутренних размеров полюсов 3 якоря 1. Якорь выполнен разрезным в продольном направлении (фиг. 2) и состоит по меньшей мере из двух соединенных друг с другом частей 7 и 8 (фиг. 2 и 4). Указанное соединение осуществляется любым известным способом, например сваркой, склеиванием и т.п. В данном варианте соединение частей 7 и 8 осуществлено посредством обойм 9, 10 с соединительными винтами 11. В стыках между частями 7 и 8 якоря 1 выполнена электрическая изоляция (не показана) для исключения паразитных короткозамкнутых витков якоря. Способ соединения частей 7, 8 не имеет непосредственного отношения к изобретению. В любом случае независимо от количества частей, на которые разделен якорь, а также от способа их соединения важно, что конструкция собирается при перекрывающих друг друга в радиальном направлении полюсах статора и якоря. Это обеспечивает сокращение радиального габарита привода, который может быть постоянным вдоль оси привода и определяется минимальным необходимым размером электромагнитных обмоток. Очевидно, что движение якоря 1 относительно статора 2 осуществляется по направляющим поверхностям, неподвижным относительно статора. В данном случае для простоты конструкции направляющие поверхности образованы хвостовикам 12, 13 статора 2 (фиг. 1). Хвостовики 12, 13, а также ответные поверхности якоря 1 в его обоймах 9, 10 целесообразно выполнить круглыми. В статоре 2 выполнен по меньшей мере один паз 14 (фиг. 2) для размещения питающих проводников 15, соединенных с обмотками 6 электромагнитов. Направление намотки соседних обмоток 6 статора 2 или порядок их соединения с источником питания (не показан) чередуется так, чтобы магнитные потоки, создаваемые в полюсах 4 соседними обмотками 6, суммировались. Такое выполнение известно.
Другой вариант электромагнитного привода, представленный на фиг. 5 10, отличается тем, что якорь 1 состоит из двух частей 16, 17. Между соседними полюсами 3 якоря 1 у противолежащих торцовых поверхностей полюсов размещены пары витков 18, 19, при этом витки 18, размещенные относительно соответствующих обмоток 6 в сторону рабочего движения якоря 1, выполнены из электропроводного материала, а витки 19 из неэлектропроводного материала (пластмасса, керамика и т.п.). Витки 18, 19 разделены и фиксируются соответствующими выступами (не обозначены) прокладок 20 и 21, размещенных соответственно между частями 16, 17 якоря 1 и в его продольных пазах 22. Витки 18, 19 размещены в поднутрениях 23, 24 полюсов 3 якоря 1. Таким образом, якорь имеет короткозамкнутые витки 18, которые создают дополнительную силу в направлении движения якоря 1 при нарастании магнитного потока в каждой обмотке 6. При такой конструкции фиксация короткозамкнутых витков 18 обеспечивается прокладками 20, 21 с помощью "холостых" витков 19. Зафиксированные в поднутрениях (не обозначены) полюсов 3 витки 18, 19 выполняют дополнительно функцию соединительных элементов для соединения частей 16, 17 якоря.
В варианте, представленном на фиг. 11 и 12, отличие заключается в том, что якорь 1 выполнен из отдельных частей 23, 24, разделенных в поперечном направлении стыками 25 (фиг. 11), и имеет полюса, каждый из которых образован частями 3а и 3b. Поверхности поперечных разрезов по стыкам 25 проведены через середины полюсов 3 якоря 1 для того, чтобы не создавать дополнительных паразитных стыков на пути магнитного потока. В данном варианте стягивание якоря 1 осуществлено в обойме 26, имеющей резьбу для взаимодействия с нажимной гайкой 27.
В варианте электромагнитного привода, показанном на фиг. 13 16, отличие заключается в том, что якорь образован собранными в обойме 26 отдельными полюсами 3 и дистанционными элементами или проставками 29 (фиг. 13), образующими короткозамкнутые витки для усиления электромагнитных сил и имеющими прорези 28, 30 (фиг. 13 и 16) для того, чтобы собственно короткозамкнутый виток был размещен относительно обмотки 6 только в сторону рабочего движения якоря 1.
В варианте электромагнитного привода, показанном на фиг. 17 19, отличие заключается в том, что якорь образован отдельными полюсами 3, которые имеют на противоположных торцах элементы быстроразъемных соединений, например, типа ласточкина хвоста (не обозначены), и дистанционными кольцами 31 (фиг. 17 и 19) с ответными элементами быстроразъемных соединений (не обозначены). Указанные элементы быстроразъемных соединений выполнены на полюсах 3 только на части их окружности, как показано позицией 32 на фиг. 18, для того, чтобы можно было осуществить сборку. Для сборки якоря используют прокладки 30 (фиг. 18 и 19), имеющие выступы 34 и входящие между полюсами 3 якоря 1. Сборка якоря завершается посредством стяжных элементов 35, 36.
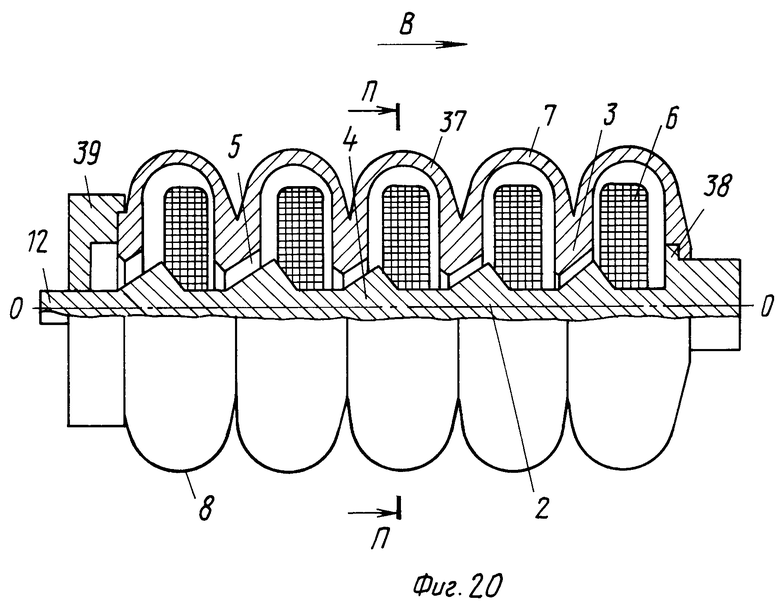
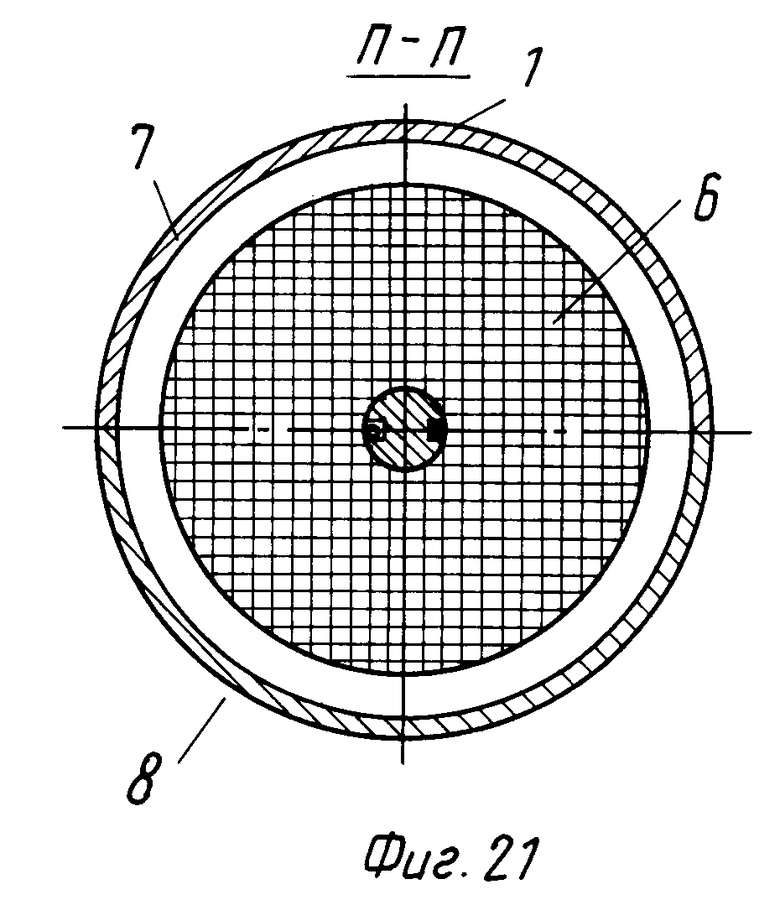
В варианте, представленном на фиг. 20 и 21 отличие заключается в том, что якорь 1 образован упруго податливыми в продольном направлении элементами 37 (фиг. 20), расположенными между полюсами 3 и предпочтительно выполненными за одно целое с ними. Осевые зазоры 5 между полюсами 3 якоря 1 и полюсами 4 статора 2 на каждом последующем участке в направлении рабочего движения якоря меньше, чем на предыдущем участке. Один конец якоря 1 жестко соединен со статором 2 посредством выступа 38 статора 2, входящего в ответный паз якоря 1, а другой конец якоря имеет обойму 39, скользящую по направляющей поверхности хвостовика 12 статора 2.
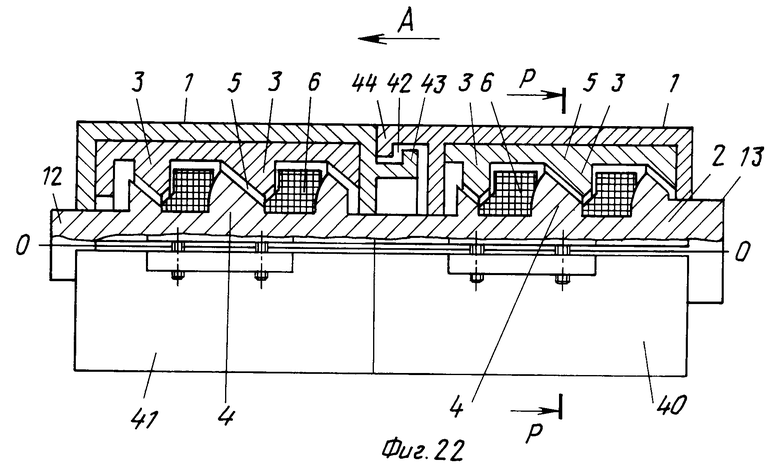
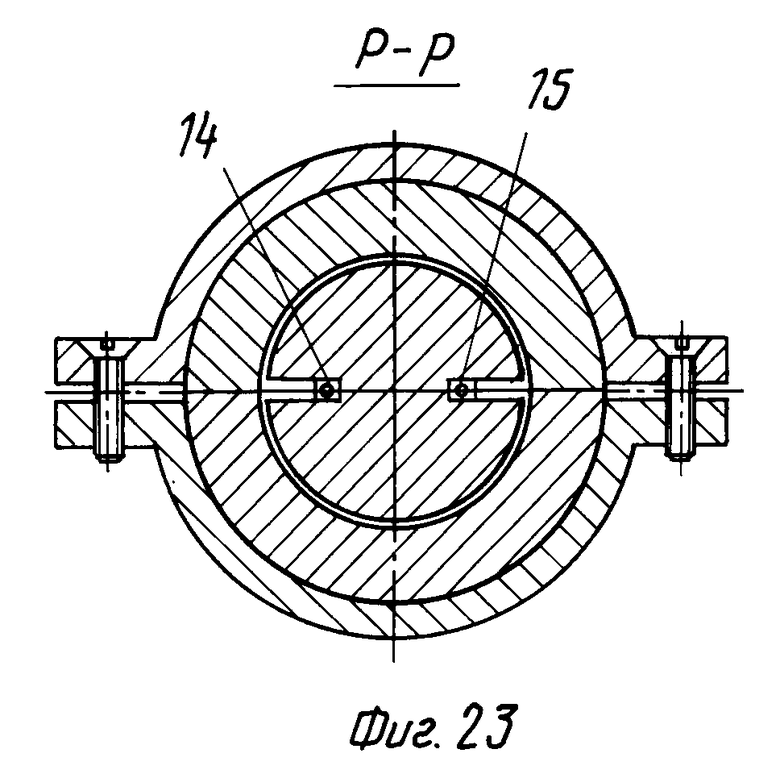
В варианте, представленном на фиг. 22 и 23, отличие заключается в том, что якорь размещен в продольном направлении по меньшей мере на два отдельных модуля 40, 41, соединенных друг с другом посредством сопрягающихся частей 43 модуля 40 и 44 модуля 41 с образованием между ними зазора 42 в осевом направлении. При этом осевые зазоры 5 между полюсами 3, 4 в каждом последующем модуле в направлении А рабочего движения меньше, чем в предыдущем.
Предлагаемый электромагнитный привод (фиг. 1 4) работает следующим образом.
При подаче тока по проводникам 15 к отдельным обмоткам 6 якоря 1 в полюсах 4 статора создаются магнитные потоки, проходящие через зазоры 5 в полюса 3 якоря 1. При этом создается электромагнитная сила, притягивающая полюса якоря к полюсам статора. Осевая составляющая этой силы, параллельна оси ОО электромагнитного привода, вызывает перемещение якоря 1 в направлении, показанном стрелкой А, т.е. в направлении рабочего движения с выборкой зазоров 5.
Вариант, показанный на фиг. 5 10, работает аналогично, с той лишь разницей, что при нарастании магнитных потоков в отдельных электромагнитах в короткозамкнутых витках 18 якоря 1 наводятся токи, которые, взаимодействуя с основными магнитными потоками, создают дополнительные электромагнитные силы, действующие в осевом направлении также по стрелке А. Это повышает быстродействие привода и/или снижает его удельную потребляющую мощность.
Электромагнитный привод, представленный на фиг. 11 и 12, работает как описано выше, с той лишь разницей, что дополнительные стыки 25 между частями якоря, которые облегчают изготовление и сборку якоря 1, не создают дополнительных паразитных сопротивлений в магнитопроводе якоря.
Электромагнитный привод, представленный на фиг. 13 16, работает как описано выше со ссылкой на фиг. 5 10, с той лишь разницей, что он имеет паразитные стыки между полюсами 3 якоря 1 и дистанционными элементами, образующими короткозамкнутые витки 29. Однако этот недостаток компенсируется значительным уплотнением изготовления и сборки привода.
Вариант, представленный на фиг. 17 19, работает так же, как и вариант, представленный на фиг. 11 и 12.
Вариант, представленный на фиг. 20 и 21, работает следующим образом
При подаче тока по проводникам 15 к отдельным обмоткам 6 якоря 1 в полюсах 4 статора создаются магнитные потоки, переходящие через зазоры 5 в полюса 3 якоря. При этом создается электромагнитная сила, притягивающая полюса якоря к полюсам статора. Осевая составляющая этой силы, параллельная оси ОО электромагнитного привода, вызывает перемещение якоря 1 в направлении, показанном стрелкой В, т.е. в направлении рабочего движения с выборкой зазоров 5. При этом сжимаются упругие элементы 37, которые при отключении электромагнитных обмоток 6 обеспечивают возврат якоря 1 в исходное положение без необходимости в отдельных средствах возврата. Кроме того, благодаря тому, что зазор 5 уменьшается в направлении рабочего движения якоря, даже при одновременной подаче тока во все обмотки 6, происходит увеличение хода якоря благодаря последовательному уменьшению зазоров в каждом последующем электромагните в направлении стрелки В. Таким образом, перемещение последнего полюса 3 якоря 1 происходит на расстояние, равное его наибольшему зазору 5.
Вариант, представленный на фиг. 22 и 23, работает подобно представленному на фиг. 20 и 21, но возврат модулей 40, 41 якоря 1 в исходное положение осуществляется общим или отдельными средствами возврата. Зазоры 5 между полюсами модуля 41 больше зазоров между полюсами модуля 40. Этот вариант обеспечивает возможность ступенчатого (по числу модулей якоря 1) перемещения якоря и/или изменения хода путем изменения числа включаемых модулей и работает следующим образом.
При подаче тока по проводникам 15 к обмоткам 6 модуля 40 под действием осевой составляющей электромагнитной силы, притягивающей полюса 3 модуля 40 якоря к полюсам 4 статора, модуль 40 перемещается в направлении, показанном стрелкой А, одновременно перемещая модуль 41 якоря в том же направлении и на то же расстояние. При последующей или одновременной подаче тока к обмоткам 6 модуля 41 он дополнительно перемещается в направлении, показанном стрелкой А в пределах зазора 42 между сопрягающимися частями 43, 44 соответственно модулей 40, 41 на не выбранную при движении модуля 40 часть зазора 5 между полюсами 3 и 4 в модуле 41 якоря.
| название | год | авторы | номер документа |
|---|---|---|---|
| СВОБОДНОПОРШНЕВОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ С ЛИНЕЙНЫМ ЭЛЕКТРИЧЕСКИМ ГЕНЕРАТОРОМ ПЕРЕМЕННОГО ТОКА | 1999 |
|
RU2150014C1 |
| СТАТОР КОЛЛЕКТОРНОЙ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 1996 |
|
RU2104605C1 |
| Бесщеточный генератор переменного тока | 1975 |
|
SU668045A1 |
| АСИНХРОННЫЙ ТРЕХФАЗНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2018 |
|
RU2759161C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ ФОРСУНКА | 1999 |
|
RU2150019C1 |
| СТАТОР КОЛЛЕКТОРНОЙ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 1996 |
|
RU2107375C1 |
| ЦЕНТРОБЕЖНЫЙ КРИОГЕННЫЙ КОМПРЕССОР | 1992 |
|
RU2034999C1 |
| СИНХРОННО-АСИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2018 |
|
RU2752234C2 |
| УСТРОЙСТВО ДЛЯ ЗАБИВАНИЯ ГВОЗДЕЙ ИЛИ СКРЕПЛЕНИЯ СКОБАМИ | 2003 |
|
RU2329136C2 |
| МОДУЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2012 |
|
RU2510121C2 |










Использование: в быстродействующих электромагнитных приводах топливных форсунок. Сущность изобретения: электромагнитный привод имеет якорь 1 с полюсами 3 в виде внутренних выступов и концентрично размещенный внутри якоря статор 2 с ответными полюсами 4 в виде наружных выступов, имеющих торцовые поверхности, расположенные с осевым зазором 5 относительно ответных торцовых поверхностей полюсов якоря, со стороны, расположенной в направлении рабочего движения якоря. Между полюсами 4 статора 2 размещены обмотки 6, образующие с полюсами 4 статора 2 элементарные электромагниты с чередующийся полярностью для продольного перемещения якоря 1 относительно статора 2. Проекции полюсов 4 статора 2 на плоскость, перпендикулярную оси привода, частично перекрывают проекции полюсов 3 якоря 1 на ту же плоскость. Якорь выполнен разрезным в продольном направлении и состоит по меньшей мере из двух соединенных друг с другом частей. 10 з. п. ф-лы, 23 ил.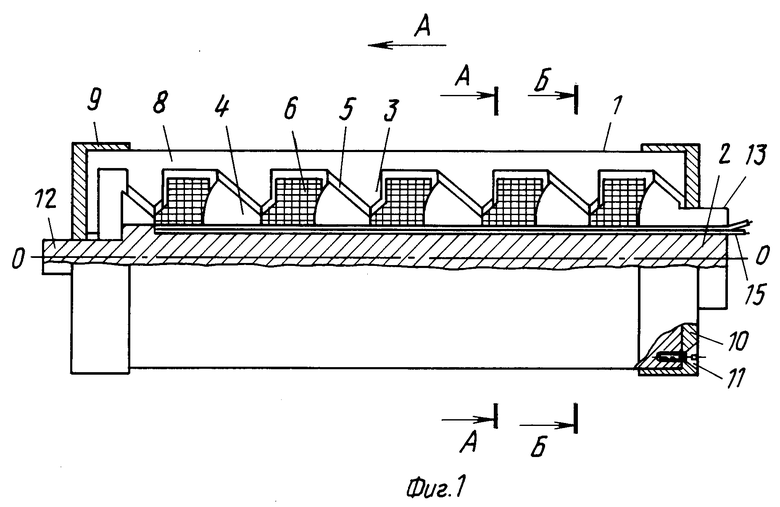
| Патент США N 4090097, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
