Изобретение относится к весоизмерительной технике и может быть использовано для взвешивания с высокой точностью близких по весу зарядов ударных капсюльных составов или порохов преимущественно в автоматических роторных линиях.
Известен датчик, содержащий две металлические ленты криволинейной формы, к центральным выступам которых прикреплены пластинчатые электроды с выводами [1] Концы пластин связаны с тяговыми усиками. Конструкция датчика позволяет при сравнительно малом перемещении концов упругих элементов вызвать сравнительно большие взаимные перемещения электродов и связанное с этим большое изменение емкости.
Недостатками конструкции датчика являются его низкая чувствительность из-за значительной жесткости пружин и низкая точность, обусловленная существенным влиянием температурного фактора.
Наиболее близким к изобретению по технической сущности является датчик, содержащий кольцевой упругий керамический элемент, в центре которого закреплена тяга [2] Упругий элемент закреплен между двумя концентрично расположенными по отношению к тяге кольцевыми электродами емкостного преобразователя. Все конструктивные элементы датчика объединены при помощи обойм, а с торцовых сторон датчика герметизирован мембранами. Внутренняя полость заполнена диэлектрической жидкостью. Внутри датчика смонтированы также генераторы электрических колебаний, служащие для измерения емкости. При приложении усилия к тяге изменяется емкость преобразователя и частота выходного сигнала обоих генераторов, которая обратно пропорциональна квадратному корню емкости между электродами преобразователя.
Недостатками конструкции этого датчика являются низкие чувствительность и точность из-за значительной жесткости мембран и относительно большой погрешности, обусловленной температурным фактором.
Целью изобретения является увеличение чувствительности и точности датчика.
Цель достигается тем, что в устройстве, содержащем установленную в корпусе с диэлектрической жидкостью на упругой подвеске тягу с электродами емкостного преобразователя, упругая подвеска тяги выполнена в виде по крайней мере трех плоских упругих элементов, расположенных симметрично по окружности относительно оси чувствительности устройства, средние части упругих элементов закреплены на размещенном в корпусе стакана из диэлектрического материала, а концы при помощи струн соединены с тягой и предварительно упруго деформированы, на одном из концов тяги закреплен подвижный электрод емкостного преобразователя, неподвижный электрод которого установлен в стакане, при этом в устройство введены установленные на другом конце тяги электромагнитный демпфер, грузоприемная площадка, электромагнит, связанный рычажной системой с тягой, и эталон веса.
Концы упругих элементов могут быть выполнены равного сопротивления изгибу.
Неподвижный электрод может быть установлен с возможностью установки начального зазора преобразователя.
Пусть период колебаний электрического генератора, подключенного к электродам датчика, описывается типичным выражением
T 2 π R(Cд + Co) (1) где R времязадающее сопротивление в схеме генератора;
Со паразитная емкость;
Cд=  емкость между электродами;
емкость между электродами;
К2 εS электрическая постоянная датчика;
ε диэлектрическая постоянная жидкости;
S площадь перекрытия электродов;
К1 механическая упругость датчика;
Р вес груза;
Yо межэлектродный зазор при Р 0.
Температурная нестабильность электрического генератора описывается величиной R как функцией температуры to: R(to), а температурная нестабильность датчика величиной Yo: Yo(to).
Из очевидного равенства
Рз Рэ + (Рз Рэ) (2) где Рз и Рэ веса заряда и эталона соответственно, следует, что в результате вычислений должна быть найдена разность Рз Рэ, так как вес эталона Рэ известен заранее с высокой точностью.
Найдем с учетом формулы (1) разность периодов колебаний Тг+з Тг+э, соответствующих установленным на грузовой площадке гильзе с зарядом и гильзе с эталоном
Tг+з-Tг+э= 2πRK
≈  (Pз-Pэ), (3) где Рг и Рог текущий вес гильзы и средний вес гильз соответственно.
(Pз-Pэ), (3) где Рг и Рог текущий вес гильзы и средний вес гильз соответственно.
Погрешность приближения не превышает 0,1% при К1(Рг + Рэ) < 0,1 Yo, что всегда выполняется на практике.
Из выражения (3) находим разность Рз Рэ
Pз-Pэ=  (Tг+з-Tг+э), (4) которая после подстановки в (2) и дает искомый вес заpяда Рз с учетом калибровки весом эталона Рэ. Выражение (4) позволяет сделать два основных вывода. Во-первых, при весе заряда, равном весу эталона, погрешность взвешивания равна нулю, так как отсутствует аддитивная составляющая погрешности. Во-вторых, погрешность взвешивания, связанная с температурной нестабильностью генератора колебаний и датчика (R, Yo) пропорциональна разности Рз Рэ, а не Рз без калибровки, что значительно снижает абсолютную погрешность взвешивания заряда. Данные обстоятельства и обусловили использование в качестве эталона веса средний вес зарядов, так как именно он обеспечивает минимальную абсолютную погрешность взвешивания.
(Tг+з-Tг+э), (4) которая после подстановки в (2) и дает искомый вес заpяда Рз с учетом калибровки весом эталона Рэ. Выражение (4) позволяет сделать два основных вывода. Во-первых, при весе заряда, равном весу эталона, погрешность взвешивания равна нулю, так как отсутствует аддитивная составляющая погрешности. Во-вторых, погрешность взвешивания, связанная с температурной нестабильностью генератора колебаний и датчика (R, Yo) пропорциональна разности Рз Рэ, а не Рз без калибровки, что значительно снижает абсолютную погрешность взвешивания заряда. Данные обстоятельства и обусловили использование в качестве эталона веса средний вес зарядов, так как именно он обеспечивает минимальную абсолютную погрешность взвешивания.
П р и м е р. Пусть Рэ 50 мг, а разность Рз Рэ 1 мг, что зачастую соответствует максимально допустимому отклонению. Тогда, даже при явно завышенной 5%-ной температурной нестабильности датчика 0,975 Yo< Yo (to) < 1,025 Yo максимальная абсолютная погрешность взвешивания заряда составит величину лишь 0,1 мг: 0,95 мг ≅ (Рз Рэ)(to) ≅ 1,05 мг.
При отсутствии калибровки она равнялась бы 50 мг ˙ 0,05 2,5 мг.
Заполнение корпуса датчика демпфирующей диэлектрической жидкостью и введение электромагнитного демпфера значительно повышают быстродействие, снижая время успокоения после установки для снятия груза при одновременном увеличении его вибрационной и ударной устойчивости. Выполнение концов пружин равного сопротивления изгибу обеспечивает работу консоли пружины на всей длине, что повышает стабильность работы датчика.
Установка неподвижного электрода на микровинте с возможностью регулировки величины начальной емкости емкостного преобразователя обеспечивает (при необходимости) возможность подстройки чувствительности датчика при переходе от взвешивания одного типа патронов к другому.
Введение не менее трех плоских пружин, расположенных симметрично по окружности вокруг тяги и параллельно ей, концы которых с предварительной упругой деформацией через струны соединены с тягой, а также введение эталона среднего веса зарядов и электромагнита с рычагом с возможностью перед взвешиванием калибровки датчика, а также введение жидкостного и электромагнитного демпфирования обуславливают новые свойства датчика высокую чувствительность и точность при одновременном исключении влияния температурных воздействий.
На фиг. 1 показано предлагаемое устройство; на фиг. 2 сечение А-А на фиг. 1; на фиг. 3 временные диаграммы.
Устройство содержит корпус 1, в котором через герметизирующую прокладку 2 установлен диэлектрический стакан 3. На стакане 3 закреплены три упругих элемента пружины 4 в их средней части с возможностью изгиба концов пружин. Концы пружин выполнены равного сопротивления изгибу, постоянной толщины, но переменной ширины, удовлетворяющей следующей зависимости ширины консоли пружины от длины плеча:
B(X) b 1-
1-  , где bo ширина основания пружины; L длина консоли пружины, что обеспечивает равномерную деформацию пружины на всей длине консоли и повышает стабильность ее работы. Жесткость пружин выбирается в зависимости от величины взвешиваемой массы и требуемой чувствительности датчика. Концы пружин струнами 5 соединены с втулками 6, напрессованными на тягу 7, при этом концам пружин придают предварительную упругую деформацию. Таким образом, получается относительно чувствительный и струнный объемный параллелограммный механизм. Нижний торец нижней втулки 6 является подвижным электродом. Неподвижный электрод 8 установлен на микрометрическом винте 9, что дает возможность, отпустив крышку 10 и поворачивая винт 9, регулировать начальную емкость емкостного преобразователя. На крышке 11 установлен электромагнитный демпфер 12. На верхней втулке 6 тяги 7 закреплен рычаг 13, на который электромагнит 14 через рычаг 15 может устанавливать в заданные моменты времени эталон 16 веса. При подъеме эталона веса он фиксируется упором 17. Сверху на тяге 7 установлена грузовая площадка 18. Подвижный электрод соединяется электрически с генератором колебаний через корпус устройства, а неподвижный с помощью проводника 19. Корпус устройства заполнен минеральным маслом, имеющим неизменное значение диэлектрической постоянной при изменении температуры, соответствие вязкости требованиям, предъявляемым к динамическим характеристикам устройства, а также малые электрические потери на частоте электрических колебаний емкостного преобразователя, низкую летучесть, малую абсорбционную способность по отношению к загрязнениям.
, где bo ширина основания пружины; L длина консоли пружины, что обеспечивает равномерную деформацию пружины на всей длине консоли и повышает стабильность ее работы. Жесткость пружин выбирается в зависимости от величины взвешиваемой массы и требуемой чувствительности датчика. Концы пружин струнами 5 соединены с втулками 6, напрессованными на тягу 7, при этом концам пружин придают предварительную упругую деформацию. Таким образом, получается относительно чувствительный и струнный объемный параллелограммный механизм. Нижний торец нижней втулки 6 является подвижным электродом. Неподвижный электрод 8 установлен на микрометрическом винте 9, что дает возможность, отпустив крышку 10 и поворачивая винт 9, регулировать начальную емкость емкостного преобразователя. На крышке 11 установлен электромагнитный демпфер 12. На верхней втулке 6 тяги 7 закреплен рычаг 13, на который электромагнит 14 через рычаг 15 может устанавливать в заданные моменты времени эталон 16 веса. При подъеме эталона веса он фиксируется упором 17. Сверху на тяге 7 установлена грузовая площадка 18. Подвижный электрод соединяется электрически с генератором колебаний через корпус устройства, а неподвижный с помощью проводника 19. Корпус устройства заполнен минеральным маслом, имеющим неизменное значение диэлектрической постоянной при изменении температуры, соответствие вязкости требованиям, предъявляемым к динамическим характеристикам устройства, а также малые электрические потери на частоте электрических колебаний емкостного преобразователя, низкую летучесть, малую абсорбционную способность по отношению к загрязнениям.
Устройство работает следующим образом.
В момент времени t1 на грузовую площадку устанавливается гильза (эпюра 20, фиг. 3). На этой эпюре, как и на эпюрах 21 и 22, низкий уровень соответствует установленному грузу, высокий поднятому. Так как эталон веса уже предварительно установлен на тягу (эпюра 21), то после окончания переходного процесса зазор между электродами датчика и период колебаний генератора соответствуют суммарному весу гильзы и эталона (эпюра 23) В промежутке времени t2 t3 производится измерение периода Тг+э и его запоминание (эпюра 24). В момент времени t4 с помощью электромагнита и рычага с тяги снимается эталон веса, а в гильзу помещается заряд (эпюры 21 и 22 соответственно). По окончании переходного процесса (эпюра 23) в промежутке времени t5 t6производится измерение и запоминание периода Тг+з, соответствующего суммарному весу гильзы и заряда (эпюра 24). Наконец, в момент времени t7с грузовой площадки снимается гильза с зарядом (эпюры 20, 22) а на тягу устанавливается эталон веса (эпюра 21).
Далее электронная часть весоизмерительного устройства производит вычисления по формулам (4) и (2), а затем циклы, аналогичные описанным, повторяются.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЕМКОСТНЫЙ ДАТЧИК ВЕСА | 1990 |
|
RU2027157C1 |
| АВТОМАТ ДЛЯ СОРТИРОВКИ ПО ВЕСУ СТЕРЖНЕВЫХ ИЗДЕЛИЙ | 1990 |
|
RU2062665C1 |
| ФОТОМЕТР | 1990 |
|
RU2007050C1 |
| МНОГОЗАРЯДНОЕ ГАЗОГЕНЕРИРУЮЩЕЕ УСТРОЙСТВО | 1991 |
|
RU2034227C1 |
| ДАТЧИК ЗАЩИТНОГО УСТРОЙСТВА СИСТЕМЫ ПАССИВНОЙ БЕЗОПАСНОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2043224C1 |
| ОРУЖИЕ СТРЕЛКОВОЕ | 1996 |
|
RU2103633C1 |
| САМОЗАРЯДНЫЙ ПИСТОЛЕТ | 1995 |
|
RU2088879C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ВЛИВАНИЯ ИНФУЗИОННЫХ РАСТВОРОВ | 1995 |
|
RU2110284C1 |
| РЕГУЛИРУЕМЫЙ ПРЕЦИЗИОННЫЙ СТАБИЛИЗАТОР ПОСТОЯННОГО НАПРЯЖЕНИЯ С ДВУПОЛЯРНЫМ ВЫХОДОМ | 1991 |
|
RU2037871C1 |
| ШАРОВАЯ ОПОРА НАРЕЗНОГО МИНОМЕТА | 1993 |
|
RU2083943C1 |
Сущность изобретения: в корпусе 1 с диэлектрической жидкостью на упругой подвеске размещена тяга 7 с электродами емкостного преобразователя. Упругая подвеска состоит из 3-х плоских пружин 4, расположенных симметрично по окружности вокруг тяги 7. Средние части пружин 4 закреплены на диэлектрическом стакане 3, размещенном в корпусе 1, а концы пружины струнами 5 соединены с тягой 7 и предварительно упруго деформированы. Неподвижный электрод 8 емкостного преобразователя установлен в стакане 3, а подвижный электрод (втулка 6) закреплен на одном из концов тяги 7. На другом конце тяги установлены электромагнитный демпфер 12, грузоподъемная площадка 18, эталон 16 веса электромагнит 14, связанный рычажной системой с тягой 7. 2 з. п. ф-лы, 3 ил.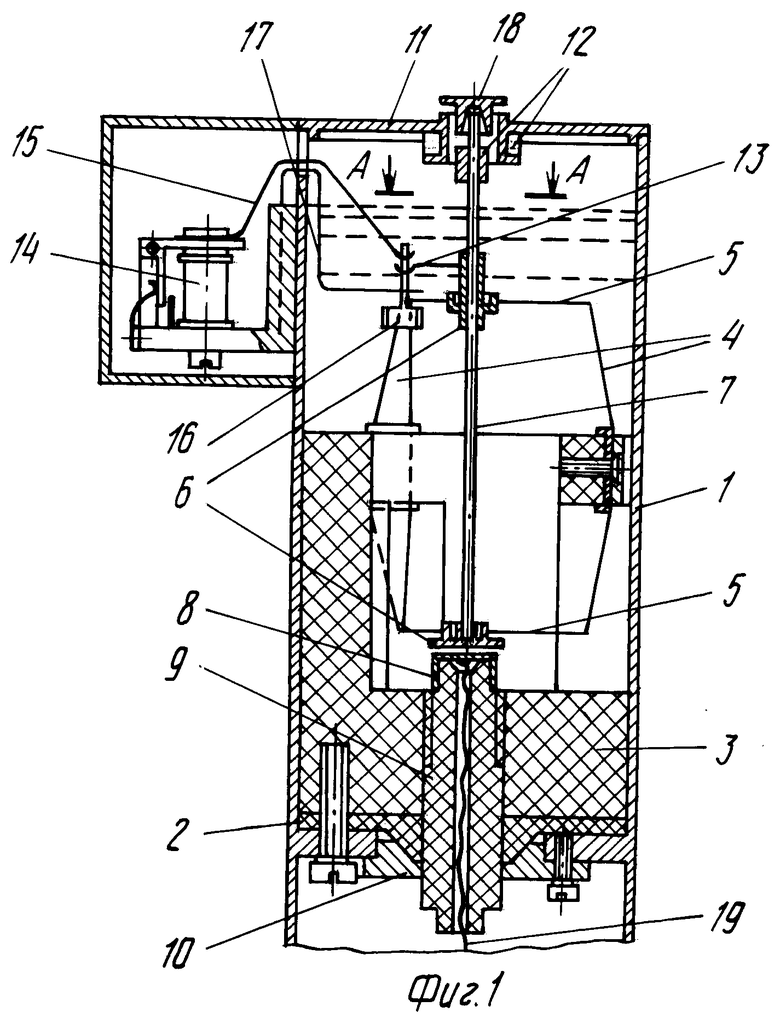
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Буровой снаряд | 1986 |
|
SU1375789A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
