Изобретение относится к медицинской технике, в частности к протезированию и протезостроению.
Известен протез бедра, содержащий трубку голени со стопой, гильзу бедра, установленную на опорную площадку, переднее и заднее звенья, соединенные с опорной площадкой и трубкой голени при помощи четырех шарниров, выполненных в виде кинематических пар пятого класса, и упругий элемент [1] Недостатком указанного устройства является асимметрия движений протезированной и сохранившейся конечностей в фазе переноса. Это объясняется следующими обстоятельствами: стопа человека при ходьбе в норме описывает сложную пространственную кривую, форма которой обусловлена трехмерной подвижностью в сочленениях конечности (голеностопном и коленном). Однако из всех сочленений протеза в фазе переноса работает только коленный шарнир и то в одной плоскости. В частности, указанный коленный механизм протеза бедра является плоским механизмом.
Известен также протез бедра с коленным механизмом, выполненным в виде дистальной и проксимальной площадок, которые соединены между собой двумя подвижными звеньями с помощью вращательных кинематических пар пятого класса, а дистальная часть выполнена в виде ротационного устройства с подвижностью в трансверсальной плоскости [2]
Указанное устройство, с одной стороны, представляет собой пространственный механизм: в фазе переноса работает в сагиттальной плоскости, а в фазе опоры в трансверсальной. Однако в фазе переноса устройство обеспечивает только плоское движение дистальной части протеза. Симметрия движений протезированной и сохранившейся конечности в фазе переноса также не обеспечивается.
Целью изобретения является повышение симметрии движений протезированной и сохранившейся конечностей при ходьбе путем обеспечения пространственного движения голени протеза со стопой в фазе переноса и приближения его пространственной траектории искусственной стопы к норме.
Достигается это тем, что оси вращения шарниров (кинематических пар), соединяющих звенья коленного механизма, расположены по скрещивающимся в пространстве прямым, причем два шарнира выполнены в виде кинематических пар пятого класса, а два в виде кинематических пар третьего класса.
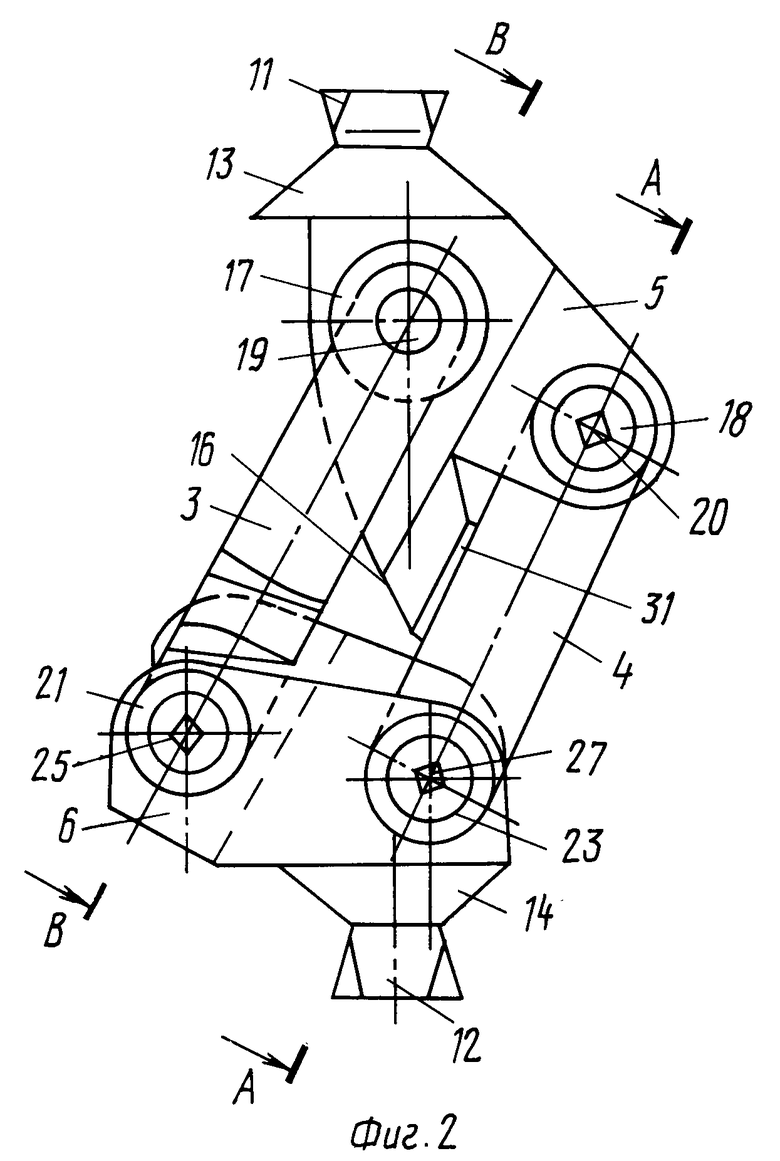
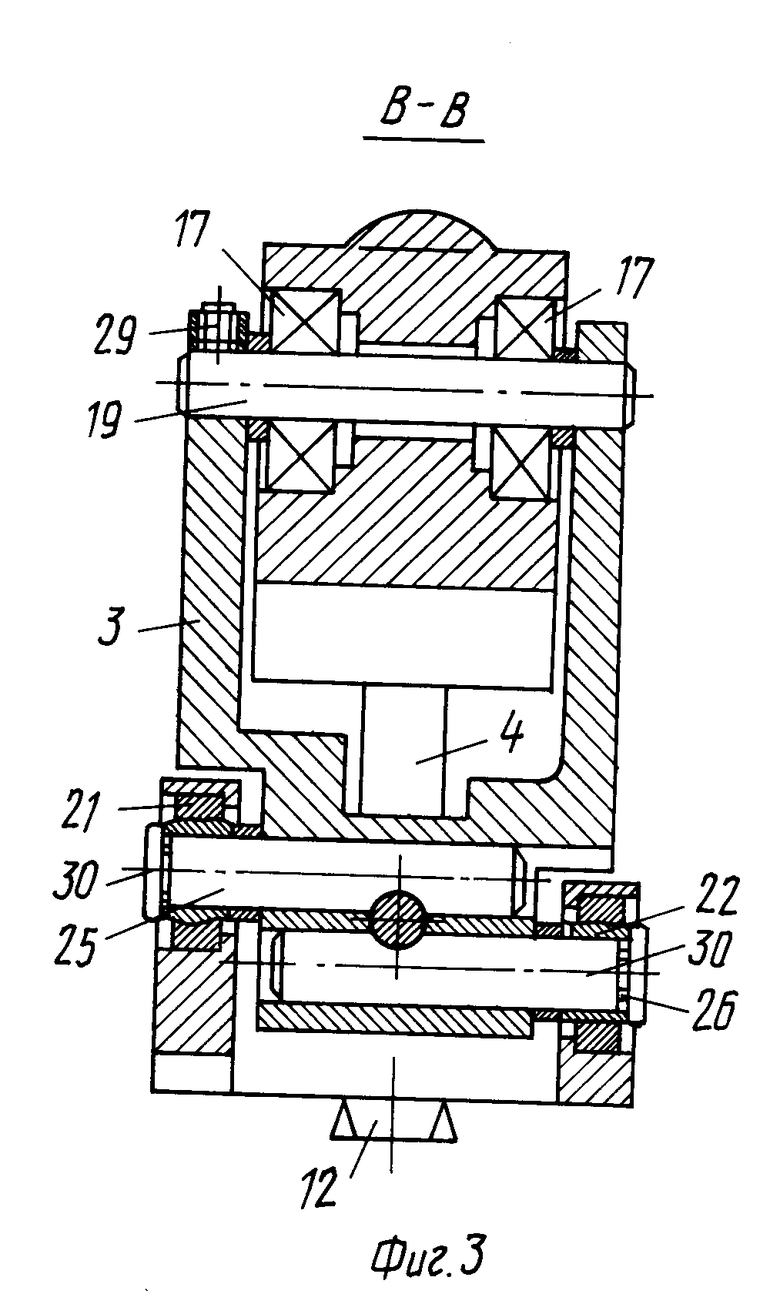
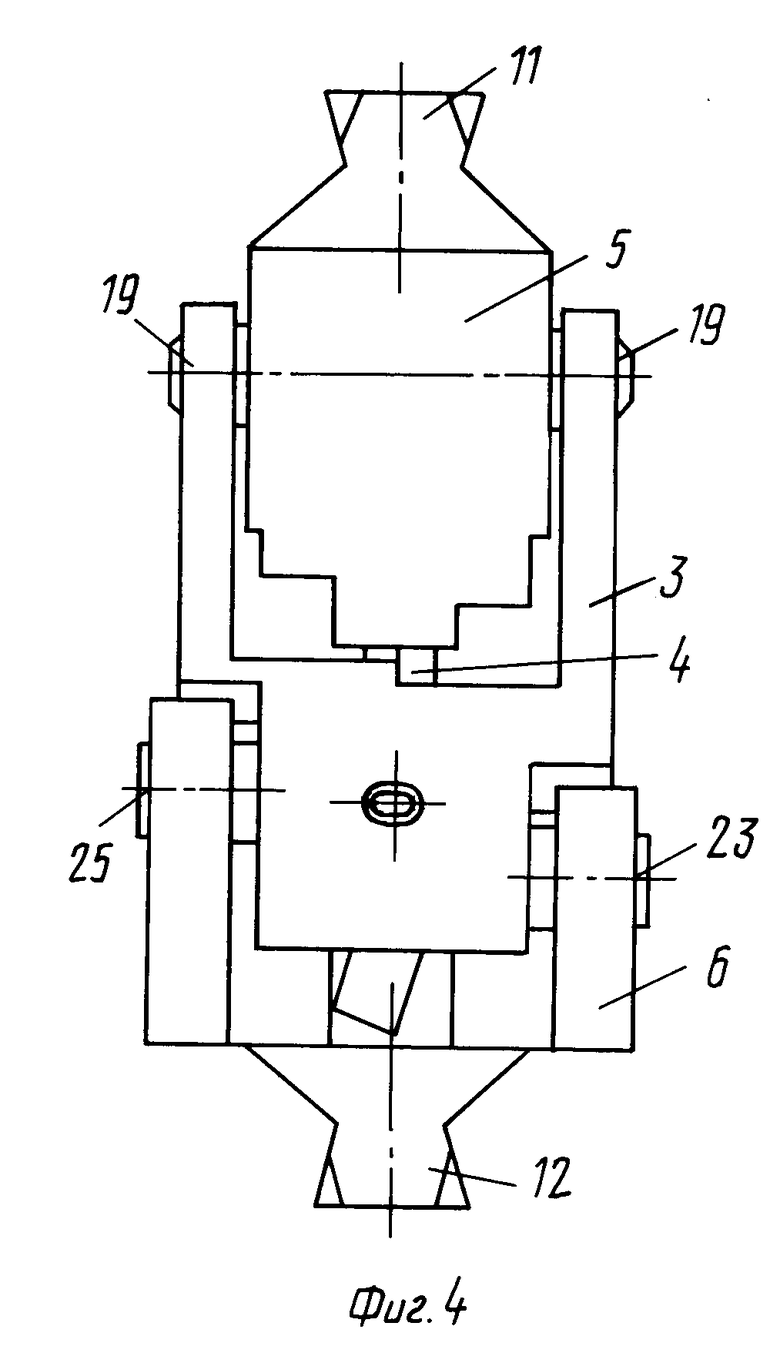
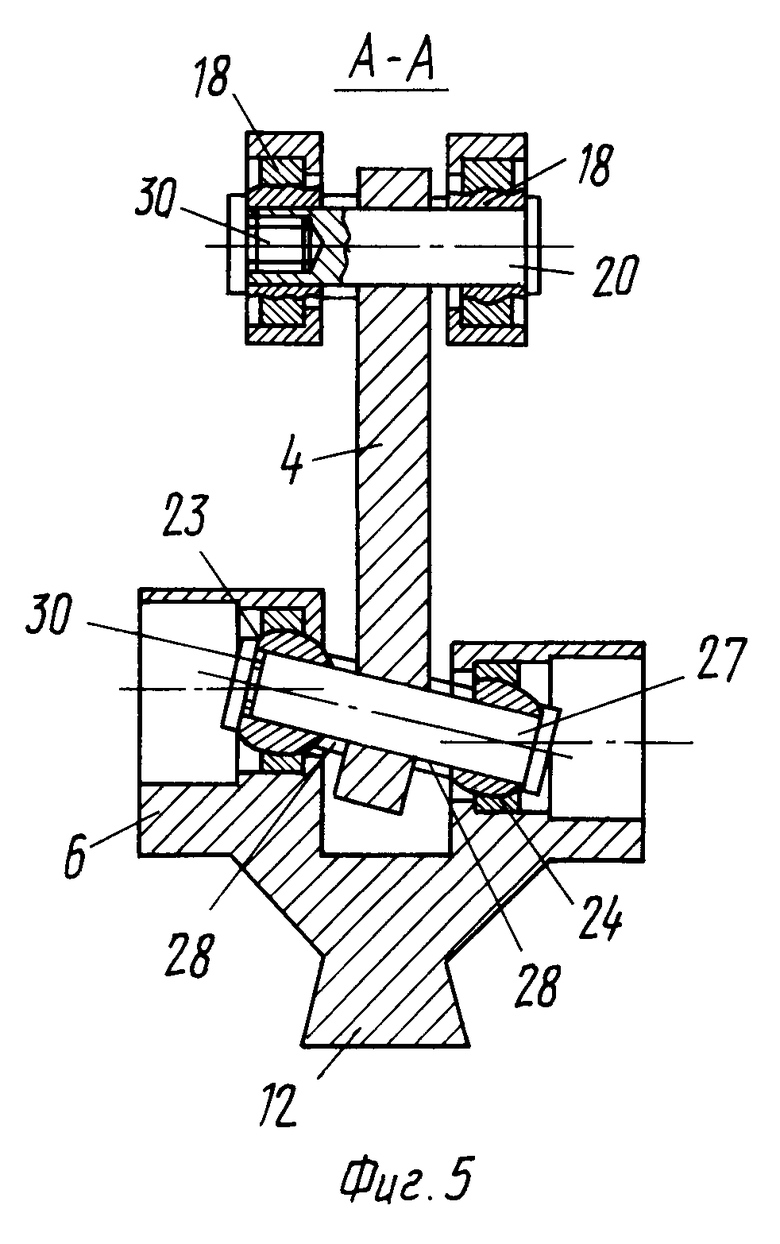
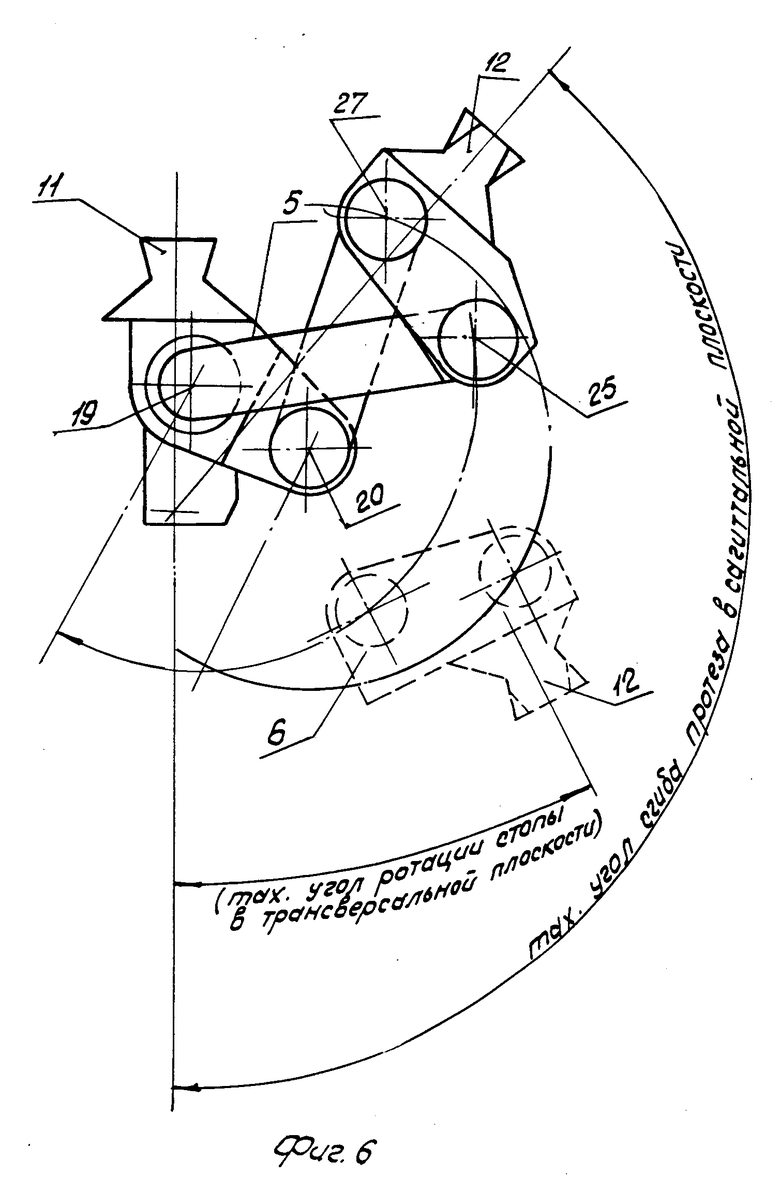
На фиг. 1 дан общий вид протеза бедра на пациенте в сагиттальной плоскости (пунктиром в согнутом положении; кривая А-А' пространственная траектория перемещения носка стопы протезированной конечности; В-В' пространственная траектория перемещения пятки протезированной конечности; на фиг. 2 то же, вид сбоку; на фиг. 3 сечение В-В повернуто; на фиг. 4 то же, вид спереди; на фиг. 5 сечение по А-А повернуто; на фиг. 6 положение звеньев пространственного коленного механизма в пространстве при сгибании в проекции на сагиттальную плоскость.
Протез содержит приемную гильзу 1, соединенную с помощью юстировочного устройства 2 с пространственным коленным механизмом, содержащим переднее 3 и заднее 4 звенья, соединенные с проксимальным 5 и дистальным 6 звеньями. Дистальное звено 6 с помощью кинематической связи 7 соединено с трубкой голени 8, соединенной с помощью голеностопного узла 9 с искусственной стопой 10.
На проксимальном 5 и дистальном 6 звеньях коленного механизма (фиг. 2) выполнены соединительные пирамидки 11 и 12 и сферические поверхности 13 и 14 соответственно. Проксимальное звено 5 выполнено с закруглением 16, моделирующим колено. Проксимальное звено 5 соединено с передним звеном (кривошипом) 3 и задним звеном (коромыслом) 4 посредством подшипника качения 17. Дистальное звено 6 соединено с передним звеном (кривошипом) 3 и задним звеном (коромыслом) 4 посредством вращательных кинематических пар третьего класса 21, 22, 23, 24 и осей 25, 26, 27 (фиг. 2 и фиг. 3). Между передним звеном (кривошипом) 3 и задним звеном (коромыслом) 4 посредством вращательных кинематических пар третьего класса 21, 22, 23, 24 и осей 15, 26, 27 (фиг. 2 и фиг. 3). Между передним звеном (кривошипом) 3, подшипниками 17, 21, 22 задним звеном (коромыслом) 4 и подшипниками 18, 23, 24 (фиг. 2-5) на соответствующих осях установлены кольца 28, ограничивающие осевое перемещение переднего 3 и заднего 4 звеньев. Для исключения поворота оси 19 относительно переднего звена 3, в отверстие последнего ввернута шпилька 29. Для крепления осей 25, 26, 27 использованы винты 30, вворачиваемые в соответствующие оси. Для обеспечения подкосоустойчивости в фазе опоры, между передним 3 и задним 4 звеньями выполнен упор 31.
Устройство работает следующим образом. При ходьбе инвалида на протезе бедра с пространственным коленным механизмом трубка голени 8 с голеностопным узлом 9 и искусственной стопой 10 сгибается относительно приемной гильзы 1. При этом происходит поворот всех осей 19, 20, 23, 25, 27 пространственного коленного механизма в соответствующих подшипниках 17, 18, 23, 24, 21, 22. В связи с тем, что указанные оси 19, 20, 23, 25, 27 расположены по скрешивающимся прямым, кривая, которую описывает дистальное звено 6 относительно опорной поверхности в фазе переноса, а вместе с ней и кривая, которую описывает искусственная стопа 10, представляет собой сложную пространственную кривую. Подобрав исходные параметры пространственного коленного механизма (длины звеньев 3, 4, расстояние между осями кинематических пар, углы наклона всех звеньев в сагиттальной, фронтальной и трансверсальной плоскостях), обеспечено хорошее совпадение траектории, движения искусственной стопы с нормой, что повысило коэффициент симметрии в фазе переноса.
Проанализируем число степеней подвижности такого механизма по формуле Сомова-Малышева:
W= 6n-5p5-4p4-3p3-2p2-p1 где n число подвижных звеньев механизма, исключая стойку;
P5, P4, P3 P1 количество кинематических пар пятого, четвертого первого класса.
В нашем случае:
W=6 ˙3-5 ˙1-4 ˙3=+1, т.е. в механизме отсутствуют пассивные связи, что в соответствии с теорией рациональных механизмов проф. Л.Н.Решетова приводит к значительному улучшению условий работы наиболее низкоресурсного звена кинематических пар, а, следовательно, к увеличению срока службы всего узла в 3-4,7 раз.
Испытания на инвалидах и биомеханические исследования ходьбы подтвердили высокую эффективность предлагаемой конструкции: кинематический коэффициент симметрии в фазе переноса вырос с 0,65 до 0,98, улучшился рисунок ходьбы, энергозатраты уменьшились на 7-0,5%
| название | год | авторы | номер документа |
|---|---|---|---|
| Протез бедра | 1983 |
|
SU1138151A1 |
| ПРОТЕЗ БЕДРА | 1992 |
|
RU2043091C1 |
| Протез нижней конечности | 1985 |
|
SU1323100A1 |
| Протез нижней конечности | 1983 |
|
SU1175471A1 |
| Протез бедра | 1988 |
|
SU1627173A1 |
| Протез бедра | 1987 |
|
SU1466738A2 |
| ПРОТЕЗ БЕДРА | 1994 |
|
RU2085152C1 |
| Коленный механизм протеза бедра | 1983 |
|
SU1124964A1 |
| Протез бедра | 1990 |
|
SU1729508A1 |
| Протез бедра | 1986 |
|
SU1454448A2 |
Использование: изобретение относится к медицинской технике, в частности к протезированию и протезостроению, для повышения симметрии ходьбы путем обеспечения пространственного движения голени со стопой в фазе переноса и приближения пространственной траектории искусственной стопы к норме. Существо изобретения: протез бедра содержит приемную гильзу 1, соединенную с помощью юстировочного устройства 2 с пространственным коленным механизмом, содержащим переднее 3 и заднее 4 звенья, соединенные с проксимальным 5 и дистальным 6 звеньями. Оси вращения шарниров, соединяющих звенья коленного механизма, расположены по скрещивающимся в пространстве прямым. При этом оси вращения шарниров, соединяющих звенья коленного механизма, пересекаются в одной точке. 6 ил.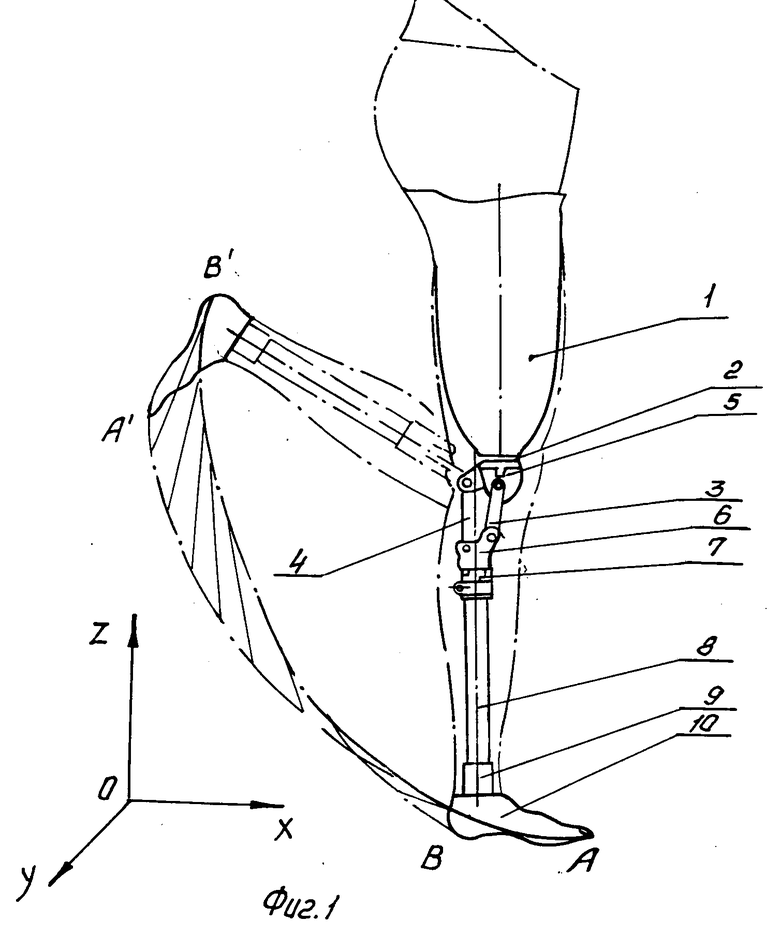
ПРОТЕЗ БЕДРА, содержащий приемную гильзу, трубку голени, юстировочное устройство, коленный механизм с опорной площадкой, нижним звеном, сопряженным с трубкой голени, искусственной стопой, передним и задним звеном, соединенным с проксимальным и дистальным звеньями кинематическими связями, отличающийся тем, что в нем кинематические связи выполнены в виде шарниров, соединяющих проксимальное и дистальное звенья и звенья коленного механизма, причем оси вращения шарниров расположены в пространстве по скрещивающимся осям, а оси вращения шарниров, соединяющих звенья коленного механизма, расположены по пересекающимся осям, при этом две кинематические связи выполнены в виде одноосных шарниров, а две в виде сферических шарниров.
| Патент США N 3820169, A 61F 2/66, кл | |||
| ПРИБОР ДЛЯ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ЗВУКОВ | 1923 |
|
SU1974A1 |
