Изобретение относится к электротехнике, в частности к магнитоуправляемым коммутационным приборам автоматики и может быть использовано в авиационной и других отраслях промышленности.
Известен путевой переключатель, содержащий подвижное ферромагнитное управляющее тело и немагнитный корпус с размещенными в нем магнитами и герконом (якорем и контактной системой).
Магниты установлены по разные стороны от перекрытия сердечников геркона осями намагничивания перпендикулярно к его продольной оси и обращенными к ферромагнитному телу разноименными полюсами. Каждый магнит выполнен с отверстием, ось которого расположена симметрично относительно полюсов магнита. Геркон частично размещен в указанных отверстиях так, что его продольная ось совпадает с осями отверстий. Магниты расположены симметрично относительно оси перекрытия сердечника геркона [1]
Недостатком данного устройства является его низкая устойчивость к механическим воздействиям. Так, вследствие того, что контакты геркона несбалансированы, то в момент действия вибрации, линейного ускорения или удара не исключено их замыкание.
Также известен переключатель, содержащий корпус, выполненный с воздушным зазором (центральным отверстием), в котором установлен магнитный привод (управляющее магнитное тело) с возможностью перемещения вдоль него, два плунжера (два якоря), подвижных вдоль их общей оси, выполненных в виде постоянных магнитов, установленных одноименными полюсами друг навстречу другу, и контактные электроды.
Воздушный зазор расположен перпендикулярно общей оси плунжеров. Магнитный привод выполнен в виде ленты с переменной магнитной проницаемостью [2]
Недостатком данного устройства также является низкая устойчивость к механическим воздействиям. Так при воздействии внешних нагрузок за счет сил инерции может произойти перемещение плунжеров (или какого-либо одного из них) из одного положения в другое, что приведет к переключению электрических контактов.
Наиболее близким к рассматриваемому датчику отрыва по технической сущности и наибольшему количеству общих существенных признаков является четырехконтактный переключатель с прямолинейным движением управляющего и вращательным движением рабочего магнита. Этот переключатель выбран за прототип.
Четырехконтактный переключатель содержит корпус с центральным отверстием, в котором установлено управляющее магнитное тело, обоймы, якоря с магнитами, равномерно расположенные в корпусе вокруг центрального отверстия с возможностью перемещения, и контактную систему.
При движении управляющего магнита под влиянием изменения полярности управляющего и рабочих магнитов происходит поворот якорей с магнитами, приводящий к изменению состояния электрических контактов переключателя [3]
Недостатком данного переключателя также, как и аналогов, является невысокая устойчивость к внешним механическим воздействиям. При действии ускорения определенной величины может происходить поворот якорей (вследствие их некоторого неизбежного дисбаланса) вокруг собственных осей вращения, приводящий к изменению состояния электрических контактов переключателя.
Задачей изобретения является создание датчика с повышенной устойчивостью к механическим воздействиям без применения балансировки подвижных элементов конструкции.
Эта задача решается тем, что датчик отрыва, содержащий корпус с центральным отверстием, в котором установлено управляющее магнитное тело, обоймы и якоря с магнитами, равномерно расположенные вокруг центрального отверстия с возможностью перемещения, и контактную систему согласно изобретению снабжен кольцом, размещенным в корпусе соосно центральному отверстию с возможностью углового поворота и имеющим жестко закрепленные на нем пальцы, расположенные параллельно оси кольца, с установленными на них с возможностью вращения вкладышами, а каждый якорь снабжен кулачком, в специальном пазу которого размещен с возможностью перемещения вдоль паза соответствующий палец кольца со вкладышем, и штоком, входящим по посадке с зазором в отверстие обоймы, жестко закрепленной в корпусе, причем ось штока якоря совпадает с направлением намагничивания его магнита, пересекается с осью центрального отверстия корпуса и перпендикулярно ей, а паз кулачка якоря выполнен так, что плоскость его симметрии параллельна оси центрального отверстия корпуса и расположена под углом α к оси штока.
Объединение якорей, равномерно расположенных по окружности, в одну подвижную систему при помощи введенного в устройство кольца с жестко закрепленными на нем пальцами с установленными на них с возможностью вращения вкладышами, а также снабжение якорей кулачками, в специальных пазах которых размещены с возможностью перемещения вдоль пазов соответствующие пальцы кольца со вкладышами, обеспечивает высокую устойчивость датчика к механическим воздействиям, так как при действии ускорения в любом направлении силы инерции, действующие на якоря, создают одинаковые по величине (при условии равенства масс якорей), но противоположные по направлению моменты вращения, приложенные к кольцу, и взаимно компенсируются. Ввиду этого углового поворота кольца не происходит и электрические контакты датчика не изменяют своего состояния.
Если разница в массе якорей невелика (что достаточно легко обеспечивается при средней точности изготовления деталей якоря), то связанный с ней нескомпенсированный момент вращения, действующий на кольцо во время перегрузки, оказывается всегда меньше момента вращения, препятствующего повороту кольца и возникающего от действия сил трения, величина которых прямо пропорциональна величине перегрузки.
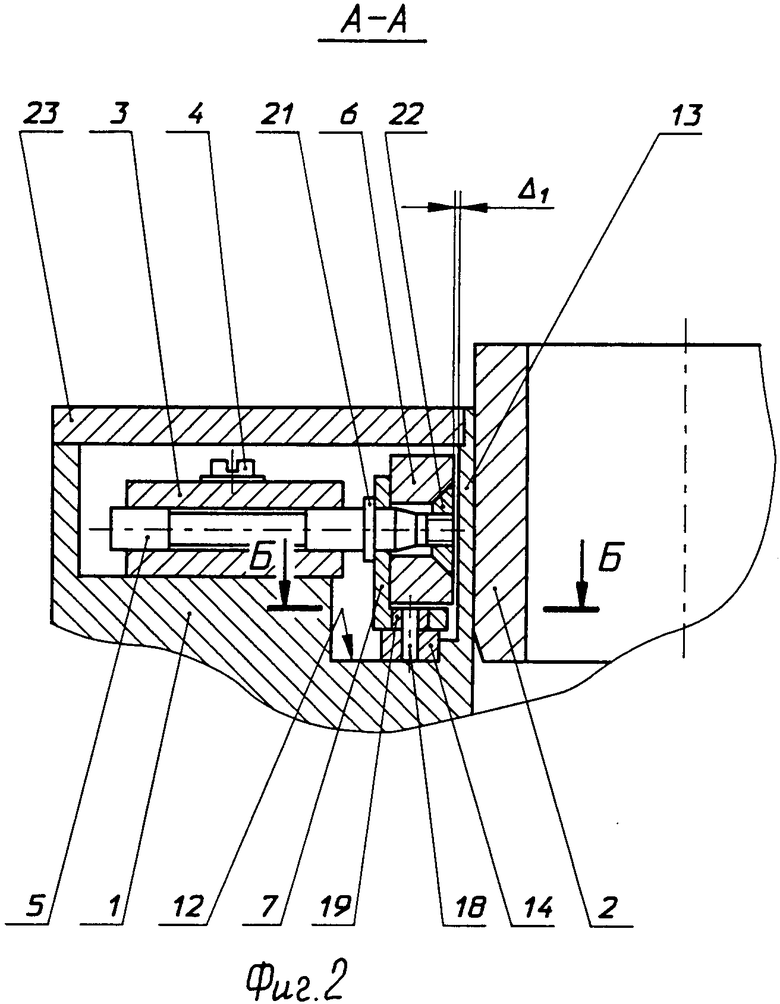
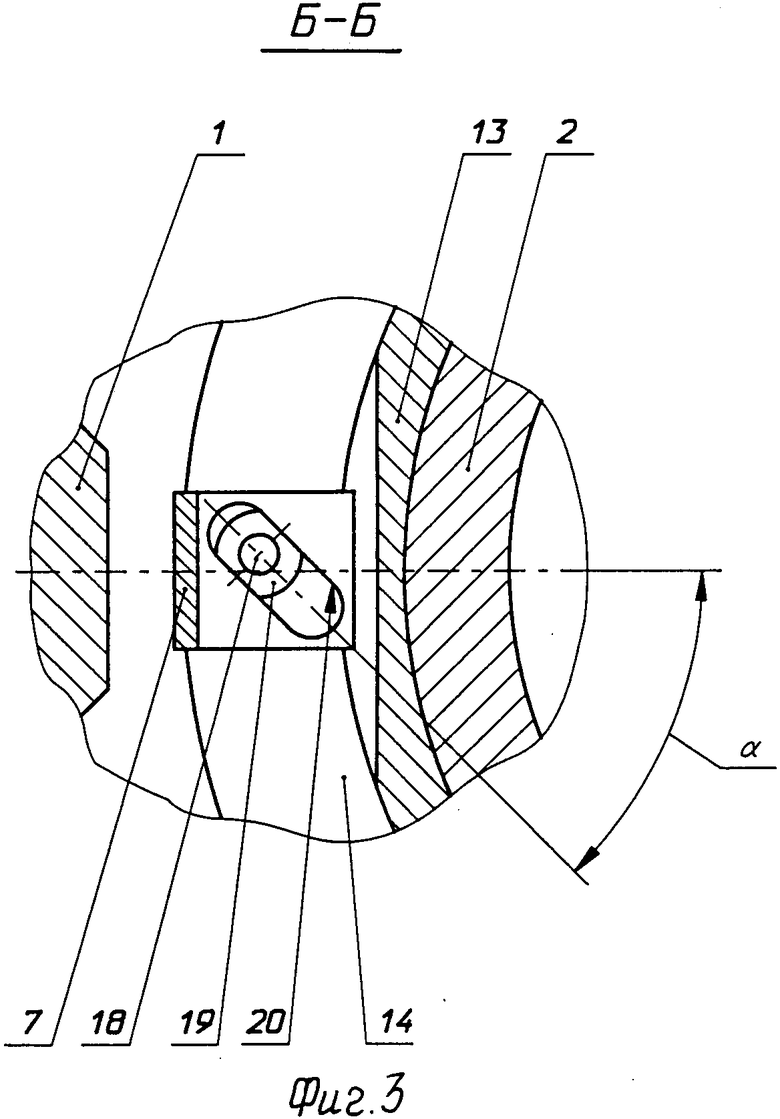
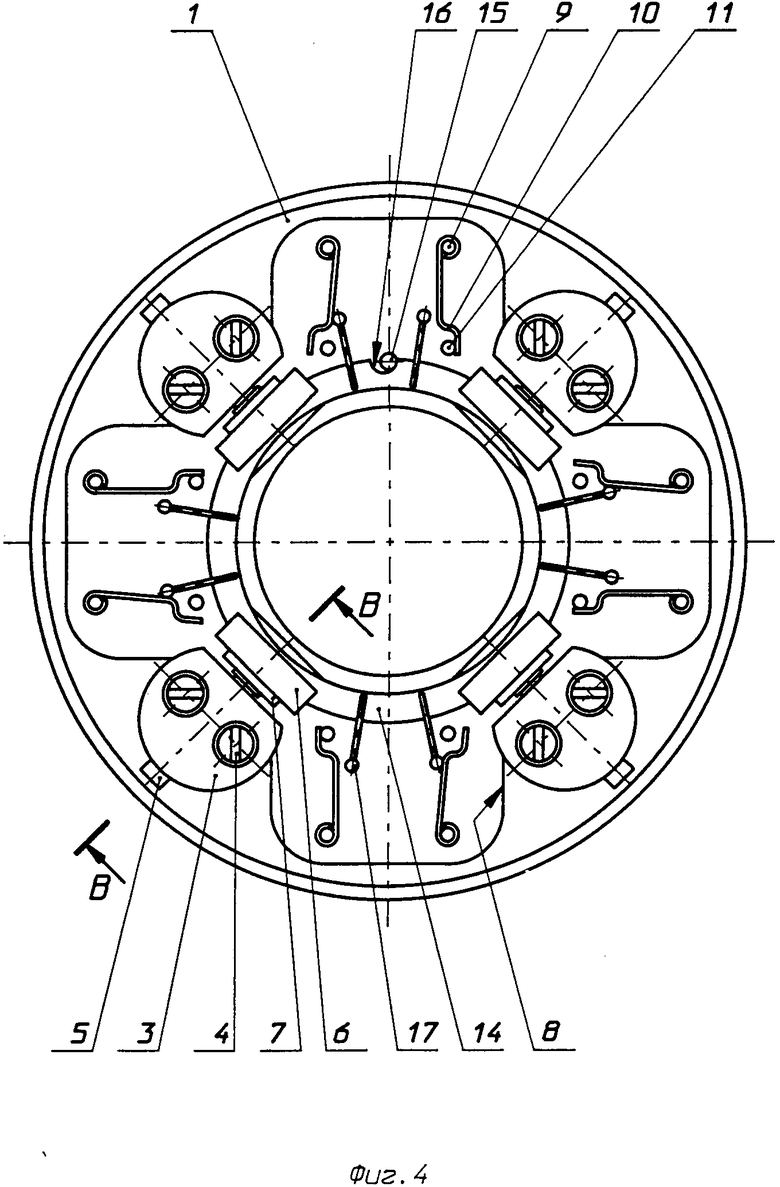
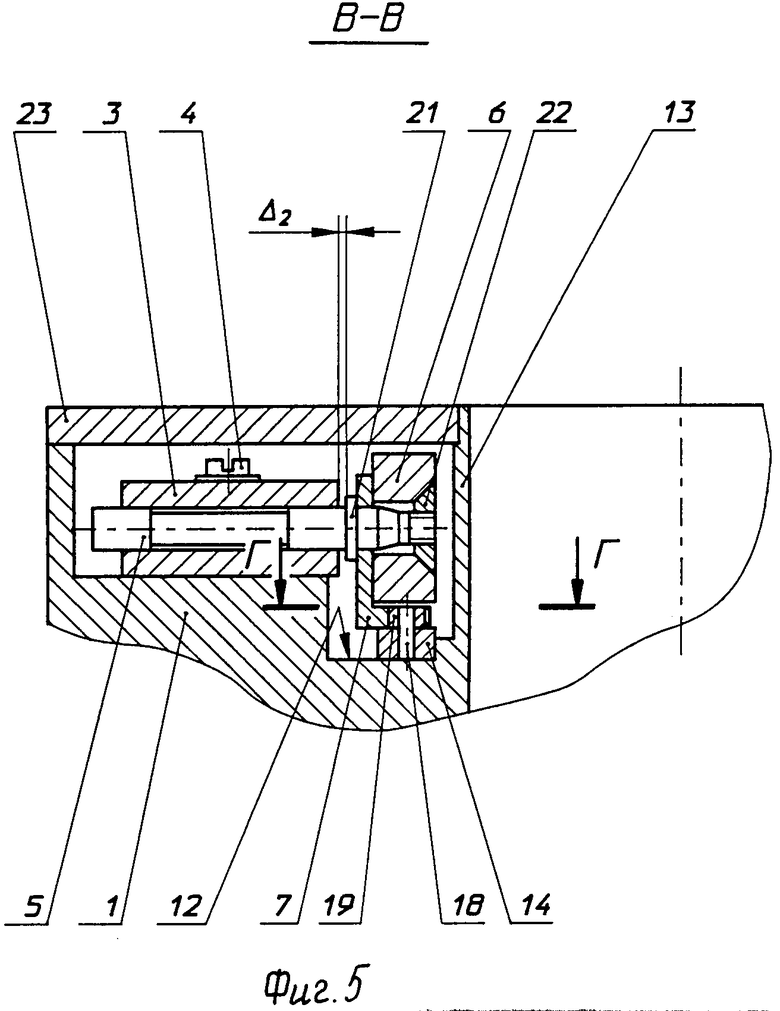
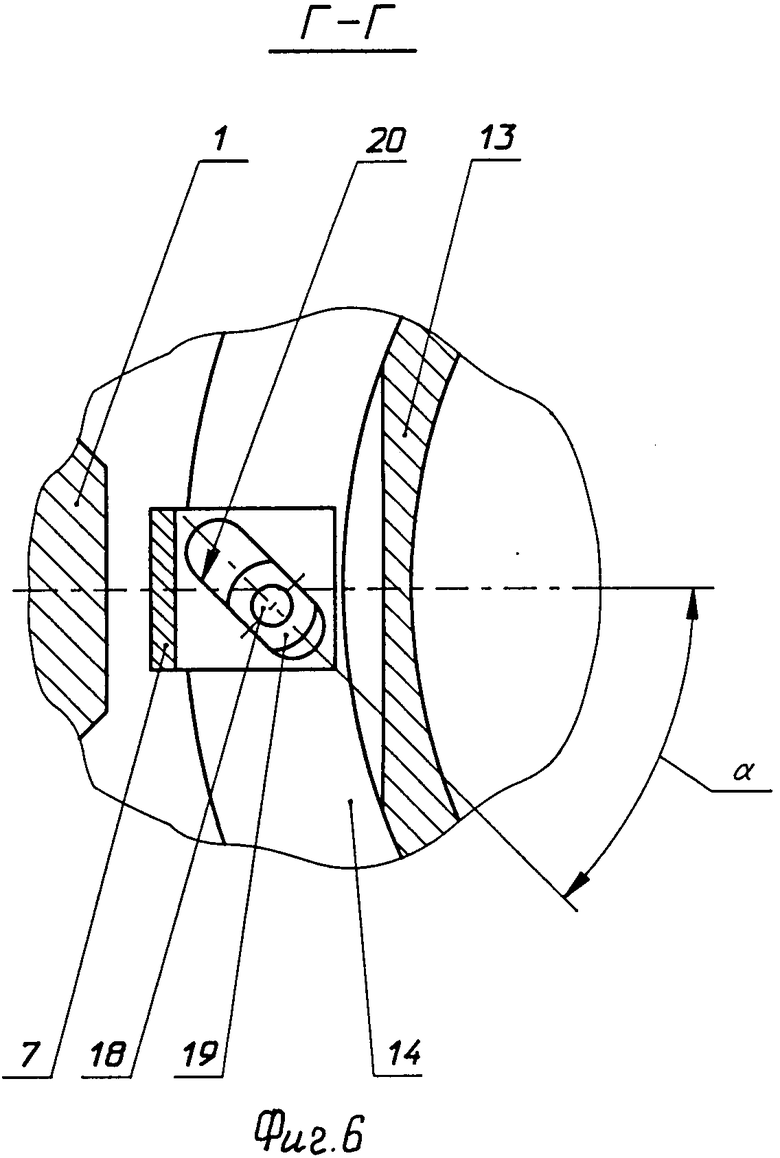
На фиг.1 изображена конструктивная схема датчика (вид сверху) в исходном состоянии; на фиг. 2 продольный разрез якоря в исходном состоянии датчика (разрез А-А на фиг.1, масштаб увеличен); на фиг.3 поперечный разрез кулачка якоря в исходном состоянии датчика (разрез Б-Б на фиг.2, масштаб увеличен); на фиг.4 конструктивная схема датчика (вид сверху) в сработанном состоянии; на фиг.5 продольный разрез якоря в сработанном состоянии датчика (разрез В-В на фиг.4, масштаб увеличен); на фиг.6 поперечный разрез кулачка якоря в сработанном состоянии датчика (разрез Г-Г на фиг.5, масштаб увеличен).
Датчик отрыва состоит из корпуса 1, выполненного из немагнитного сплава. В центральном отверстии корпуса 1 установлено управляющее тело 2, выполненное из магнитомягкой стали.
В корпусе 1 равномерно по окружности вокруг центрального отверстия в четырех обоймах 3, выполненных из магнитомягкой стали и прикрепленных к корпусу 1 винтами 4, размещены с возможностью перемещения якоря.
Каждый из якорей включает в себя шток 5, магнит 6 и кулачок 7. Шток 5 одним концом входит в отверстие обоймы 3 по посадке с зазором, а другим в отверстие магнита 6, причем ось штока 5 совпадает с направлением намагничивания магнита 6, пересекается с осью центрального отверстия корпуса 1 и перпендикулярна ей.
В корпусе 1 равномерно по окружности вокруг центрального отверстия расположены замыкающие и размыкающие электрические контакты. Каждая пара контактов (один замыкающий и один размыкающий) установлена в специальном пазу 8 корпуса 1. Каждый электрический контакт включает в себя два вывода 9. соединенные с корпусом 1 при помощи металлостеклянного спая, на одном из которых закреплена контактная пружина 10, а на другом неподвижный контакт 11 (см. фиг.1).
В корпусе 1 вокруг центрального отверстия и соосно ему выполнена проточка 12, образующая профильную стенку 13, через которую происходит взаимодействие магнитов 6 якорей с управляющим телом 2. В проточке 12 размещено кольцо 14, имеющее возможность углового поворота вокруг оси центрального отверстия корпуса 1. Угловой поворот кольца 14 ограничен штифтом 15, запрессованным в корпусе 1 и входящим в специальный паз 16 кольца 14.
На кольце 14 закреплены толкатели 17, предназначенные для размыкания электрических контактов датчиков (фиг.1 и 2).
Кольцо 14 имеет жестко закрепленное на нем пальцы 18, расположенные параллельно оси кольца 14, с установленными на них с возможностью вращения вкладышами 19. Каждый палец 18 кольца 14 со вкладышем 19 входит в специальный паз 20 кулачка 7 якоря с возможностью перемещения вдоль него, причем паз 20 выполнен так, что плоскость его симметрии параллельна оси центрального отверстия корпуса 1 и расположена под углом a 45o к оси штока 5 (фиг.2).
На шток 5 напрессован до упора в его буртик 21 кулачок 7, к которому гайкой 22 прижимается магнит 6 (фиг.2).
Корпус 1 с входящими в него элементами датчика герметично закрыт крышкой 23.
Кольцо 14 с толкателями 17, пальцами 18 и вкладышами 19, а также связанные с ним якоря образуют подвижную систему датчика.
Подвижная система датчика настраивается так, чтобы между магнитом 6 каждого якоря и стенкой 13 (в одном крайнем угловом положении кольца 14), а также между буртиком 21 штока 5 каждого якоря и соответствующей обоймой 3 (в другом крайнем положении кольца 14) оставались гарантированные зазоры D1 и Δ2 соответственно (фиг.2 и 5).
Датчик отрыва работает следующим образом.
В исходном состоянии датчика управляющее тело 2 расположено в центральном отверстии корпуса 1. Якоря, за счет сил взаимодействия магнитов 6 с управляющим телом 2, находятся в максимально приближенном к центральному отверстию корпуса 1 положении, при этом, в результате воздействия кулачков 7 через вкладыши 19 на пальцы 18, кольцо 14 занимает одно из двух крайних угловых положений, упираясь в штифт 15, и обеспечивает тем самым остановку якорей.
При данном угловом положении кольца 14 замыкающие электрические контакты разомкнуты, так как их контактные пружины 10 отодвинуты толкателями 17 от неподвижных контактов 11, а размыкающие электрические контакты замкнуты, т. к. их контактные пружины 10 нажимают на неподвижные контакты 11 (фиг.1 и 2).
При удалении управляющего тела 2 из центрального отверстия корпуса 1 датчик переходит в сработанное состояние.
Срабатывание датчика происходит за счет сил притяжения магнитов 6 к обоймам 3, под действием которых якоря перемещаются в сторону своих обойм 3, при этом кулачки 7 якорей через вкладыши 19 воздействуют на пальцы 18 кольца 14, заставляя его повернуться до упора в штифт 15 и занять другое крайнее угловое положение.
При данном угловом положении кольца 14 замыкающие электрические контакты становятся замкнутыми, так как их контактные пружины 10 нажимают на неподвижные контакты 11, а размыкающие электрические контакты становятся разомкнутыми, так как их контактные пружины 10 отодвинуты толкателями 17 от неподвижных контактов 11 (фиг.4 и 5).
При введении управляющего тела 2 в центральное отверстие корпуса 1 возникают силы притяжения к нему магнитов 6 якорей, превосходящие по величине силы притяжения магнитов 6 к соответствующим обоймам 3, что обеспечивается определенным соотношением геометрических размеров управляющего тела 2 и обойм 3.
Под действием результирующих сил, приложенных к магнитам 6, каждый якорь перемещается в сторону управляющего тела 2 (к центральной оси датчика), заставляя кольцо 14 повернуться и занять первоначальное угловое положение (фиг.1). Таким образом датчик вновь переходит в исходное состояние.
Ввиду того, что срабатывание предлагаемого устройства происходит лишь в случае одновременного движения всех якорей к центральному отверстию корпуса 1 (либо от него), перебросы подвижной системы из одного положения в другое под действием вибрационных, линейных и ударных перегрузок любой амплитуды и формы (не приводящих к разрушению деталей датчика) практически исключаются.
Датчик рассмотренной конструкции:
1) устойчив к воздействию одиночного механического удара с пиковым ударным ускорением на уровне не менее 29420 м/с2 (3000 g):
2) стоек к воздействию линейного ускорения на уровне не менее 2450 м/с2 (250 g);
3) стоек в воздействию широкополосной случайной вибрации в диапазоне частот от 20 до 2000 Гц с суммарным среднеквадратическим значением ускорения на уровне не менее 50 м/с2 (5 g), действующей в течение 24 ч.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИОННЫЙ ВКЛЮЧАТЕЛЬ | 2001 |
|
RU2221302C2 |
| ИНТЕГРАЛЬНАЯ ТЕРМИЧЕСКАЯ МОДЕЛЬ | 2001 |
|
RU2207553C2 |
| РОТАМЕТР | 1997 |
|
RU2137093C1 |
| ИНЕРЦИОННЫЙ ВКЛЮЧАТЕЛЬ | 2000 |
|
RU2193800C2 |
| СПОСОБ ГАЗОВОЙ ДЕТОНАЦИОННОЙ ШТАМПОВКИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1995 |
|
RU2099160C1 |
| ИНЕРЦИОННЫЙ ВКЛЮЧАТЕЛЬ | 2000 |
|
RU2192683C2 |
| ДАТЧИК ДАВЛЕНИЯ | 1996 |
|
RU2120115C1 |
| ДАТЧИК УСКОРЕНИЯ | 1999 |
|
RU2192645C2 |
| СПОСОБ ГАЗОВОЙ ДЕТОНАЦИОННОЙ ШТАМПОВКИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1994 |
|
RU2080949C1 |
| ВРАЩАЮЩИЙСЯ АНОД РЕНТГЕНОВСКОЙ ТРУБКИ | 1995 |
|
RU2079180C1 |
Использование: в области электротехники, магнитоуправляемые коммутационные приборы автоматики. Сущность изобретения: заключается в том, что датчик содержит корпус (1) с центральным отверстием, в котором установлено управляющее магнитное тело (2), обоймы (3) и якоря с магнитами (6), равномерно расположенные в корпусе вокруг центрального отверстия, и контактную систему. Каждый якорь имеет шток (5), входящий по посадке с зазором в отверстие соответствующей обоймы (3), жестко закрепленной в корпусе (1) и кулачок (7) со специальным пазом (20). Датчик снабжен кольцом (4), размещенным в корпусе (1) соосно центральному отверстию и имеющим жестко закрепленные на нем пальцы (18), расположенные параллельно оси кольца (14), с установленными на них с возможностью вращения вкладышами (19). Пальцы (18) со вкладышами (19) размещены с возможностью перемещения вдоль паза (20) кулачка (7). А паз (20) кулачка (7) якоря выполнен так, что плоскость его симметрии параллельна оси центрального отверстия корпуса (1) и расположена под углом к оси штока (5). 6 ил.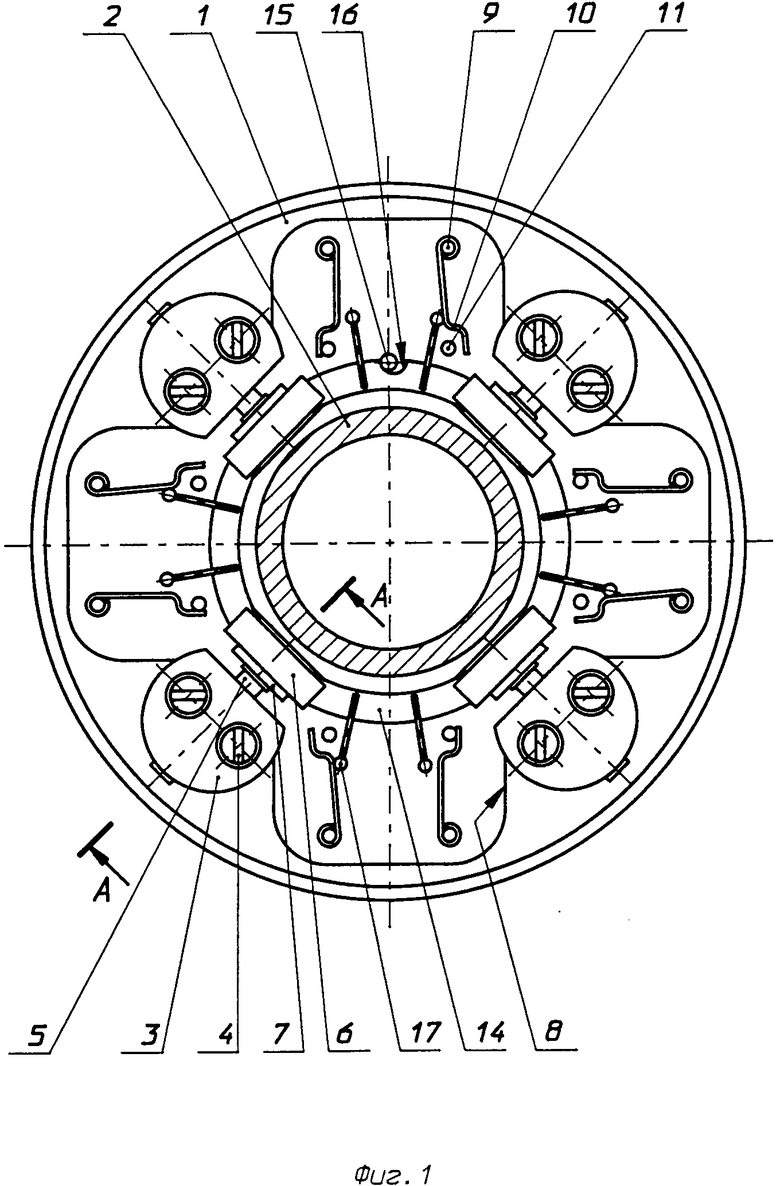
Датчик отрыва, содержащий корпус с центральным отверстием, в котором установлено управляющее магнитное тело, обоймы и якоря с магнитами, равномерно расположенные в корпусе вокруг центрального отверстия с возможностью перемещения, а также контактную систему, отличающийся тем, что он снабжен кольцом, размещенным в корпусе соосно центральному отверстию с возможностью углового поворота и имеющим жестко закрепленные на нем пальцы, расположенные параллельно оси кольца, с установленными на них с возможностью вращения вкладышами, а каждый якорь снабжен кулачком, в специальном пазу которого размещен с возможностью перемещения вдоль паза соответствующий палец кольца с вкладышем, и штоком, входящим по посадке с зазором в отверстие обоймы, жестко закрепленной в корпусе, причем ось штока якоря совпадает с направлением намагничивания его магнита, пересекается с осью центрального отверстия корпуса и перпендикулярна ей, а паз кулачка якоря выполнен так, что плоскость его симметрии параллельна оси центрального отверстия корпуса и расположена под углом α к оси штока.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Путевой переключатель | 1973 |
|
SU674112A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Переключатель | 1983 |
|
SU1145372A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Авторское свидетельство СССР N 227141, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
