Изобретение относится к электроснабжению потребителей, содержащих преимущественно синхронные двигатели (СД), требующих повышенной надежности питания и не терпящих его перерывов.
В известных устройствах автоматического включения резерва (АВР), в общем случае, управляют двумя силовыми аппаратами выключателем ввода (отключают повредившийся ввод) и выключателем резервного источника (обычно источник подключают секционным выключателем).
В устройствах традиционного АВР вначале подают команду на отключение выключателя ввода, а затем на включение выключателя резерва. Традиционный АВР обычно предполагает в процессе переключений выпадение СД из синхронизма с последующим их самозапуском.
На объектах с традиционным АВР органы управления им расположены на самом объекте. Способ управления традиционным АВР принят в качестве аналога предлагаемого изобретения.
На некоторых особо ответственных объектах применяется быстродействующий опережающий АВР (БОАВР), который в процессе переключений предотвращает выпадение СД из синхронизма, т.к. по сравнению с традиционным АВР значительно сокращает время перерыва электроснабжения в цикле переключений.
В способе управления выключателями в цикле БОАВР, при котором фиксируют факт срабатывания быстродействующей релейной защиты, установленной на головном участке сети рабочего источника питания (районная подстанция) и которая однозначно определяет повредившийся ввод, по телеканалу передают команду на включение резерва (см. статью А.А. Галицына и А.Ф. Задернюка. Опережающее АВР на подстанциях магистральных нефтепроводов. Ж. Промышленная энергетика, 1986, N 8, с. 33-36). При этом команда на отключение ввода и включение резерва является общей и подается одновременно на оба выключателя (ввода и секционный). Способ управления является избирательным, селективным.
Недостаток этого технического решения необходимость организации телеканала для передачи команды, что связано с монтажом сравнительно дорогостоящего и сложного в эксплуатации оборудования.
Целью изобретения является сокращение времени перерыва электроснабжения до величин, предотвращающих при работе АВР выпадение СД из синхронизма, не прибегая к сооружению телеканалов (это время находится в пределах 0,12 0,20с см. упомянутую статью). Поставленная цель достигается тем, что пуск АВР осуществляется до выявления повредившегося ввода (в отличие от традиционного и БОАВР) по факту возникновения повреждения в питающей сети. Для этого изменяется на обратный аналогу порядок и последовательность поступления команд на срабатывание выключателей. При этом включение резерва будет происходить на неустранившееся короткое замыкание (КЗ). Допустимость такого решения обоснована и оно внедрено на ряде объектов промышленности (см. указанную статью).
На чертеже представлена схема электроснабжения, типичная для промышленных предприятий.
Элементы 1-7 принадлежат приемной подстанции (ПС), 5 и 6 выключатели вводов, 7 выключатель резервного источника питания, нормально отключен. Элементы 8-11 принадлежат головной питающей (районной) ПС. Линии 14-17 относятся к внешней сети, 10 и 11 выключатели источников питания, 12 и 13 - линии источников питания. Протяженность пунктирной линии связи между шинами 8 и 9 равна нулю, когда эти шины принадлежат одной и той же ПС.
Рассмотрим работу аналога в этой схеме. Пусть шины 8 и 9 принадлежат одной и той же ПС, а на линии 12 вблизи выключателя 10 произошло трехфазное КЗ. Двигатели секций 1 и 2 полностью теряют питание. Установленные на приемной ПС автоматические устройства для управления АВР, реагирующие на электрические параметры в элементах этой ПС, фиксируют факт КЗ в питающей сети, но не в состоянии определить повредившийся ввод до тех пор, пока КЗ не будет отключено выключателем 10. Объясняется это тем, что электрические параметры на приемной ПС будут одинаковыми при КЗ в любой точке вблизи шин 8 и 9. Это КЗ в рассматриваемой точке, КЗ на линии 13 вблизи 11, т.е. на втором вводе и в других близлежащих точках. Отключение 10 восстанавливает напряжение на шинах 8 и 9 от нуля до номинала и через неповрежденный ввод восстанавливает питание двигателей секции 2. После отключения 10 электрические параметры приемной ПС резко меняются, четко выявляется повредившийся ввод, проходит команда на отключение 5, а после нее команда на включение 7.
Общая длительность перерыва электроснабжения для двигателей, подключенных к 1, составит величину около 0,3 с. В оценках времени принималось, что на каждую операцию (работа релейной защиты и отключение выключателя 10 в сети 110-220 кВ, работа автоматики и отключение 5, работа автоматики и включение 7 на напряжении 6-10 кВ) затрачивается по 0,1 с. Такое время работы соответствует параметрам современного оборудования. При перерыве питания 0,3с СД выпадают из синхронизма.
Рассмотрим работу АВР, используя предлагаемый способ. Исходные условия те же. На приемной ПС фиксируется факт КЗ в питающей сети и подается команда на включение 7. Через 0,1 с после возникновения КЗ отключается 10. К этому моменту уже замкнут 7 и на шинах 1 и 2 устанавливается направление питания около 60-70% от номинала до момента отключения 5, который наступит через 0,1 с после отключения 10. После отключения 5 напряжение на секциях 1 и 2 станет равным номинальному. Полное время перерыва питания СД, вызванное фактом трехфазного КЗ, составит 0,1 с и время работы с пониженным напряжением до 60-70% 0,1 с. Двигатели удержатся в синхронизме, т.е. будет достигнута цель.
Можно провести анализ работы АВР и при других видах и точках КЗ. Предложенный способ всегда эффективен.
Особенностью способа является то, что включение 7 может происходить неселективно, т. е. излишне, когда в этом нет необходимости. Измерительные органы, реагирующие на КЗ в питающей сети и расположенные на приемной ПС, должны надежно фиксировать КЗ, которые приведут к потере ввода. Для этого они должны обладать достаточной чувствительностью с некоторым коэффициентом запаса. Так, эти органы будут срабатывать при неудаленных от шин 8 и 9 КЗ в линиях 14-17, когда необходимости в АВР, т.е. в замыкании выключателя 7, нет. Команда на отключение вводов 5 или 6 при этом не последует. Излишнее замыкание 7 будет кратковременным (1-2 с), т.к. после отключения внешнего КЗ и проверки работоспособности вводов (например, по факту протекания по ним рабочего тока) специальной автоматикой может быть подана команда на отключение 7 и восстановление первоначальной схемы.
Возможность реализации способа не вызывает сомнений. Перечислим случаи, когда АВР должен приходить в действие:
ложное (ошибочное) отключение 5, 6, 10, 11;
КЗ в элементах 8, 9, 12, 13, 3 и 4.
При этом АВР должен блокироваться при КЗ "ниже" выключателей 5 и 6. Ложные отключения 5 и 6, а также повреждения трансформаторов 3 и 4 легко фиксируются на самой приемной ПС и реализация АВР, который здесь будет селективным, не вызывает затруднений.
При ложном отключении 10 или 11 критерием для работы АВР может служить, например, исчезновение тока в соответствующем вводе на приемной ПС.
Междуфазные КЗ в элементах 8, 9, 12, 13 могут быть зафиксированы при помощи направленных реле сопротивления, устанавливаемых на приемной ПС. Направленность реле предотвратит их срабатывание при КЗ на секциях 1 и 2 и ниже, когда АВР вообще не должен приходить в действие.
При КЗ на землю в элементах 8, 9, 12 и 13 в качестве критерия для команды на включение 7 может служить ток 3I0 в нейтралях 3 и 4.
Вторая команда, связанная с выбором отключаемого выключателя 5 или 6, может реализовываться по дальнейшему поведению упомянутых выше реле сопротивления или тока 3I0 после отключения КЗ со стороны питающей ПС реле на неповредившемся вводе отпадут, а на повредившемся останутся замкнутыми.
Изобретение относится к электроснабжению потребителей, содержащих преимущественно синхронные двигатели (СД), требующих повышенной надежности питания и не терпящих его перерывов. Команды управления формируются на самом объекте, где реализуется автоматика. Первой по времени подается команда на включение выключателя резервного источника питания по факту возникновения повреждения в питающей электрической сети, а затем - на отключение повредившегося рабочего источника питания по факту выявления после его отключения со стороны внешней питающей сети. Предлагаемая последовательность команд управления выключателями предполагает кратковременное включение резервного источника на неустраненное короткое замыкание (КЗ), имитируя схему с параллельной работой вводов. 1 ил.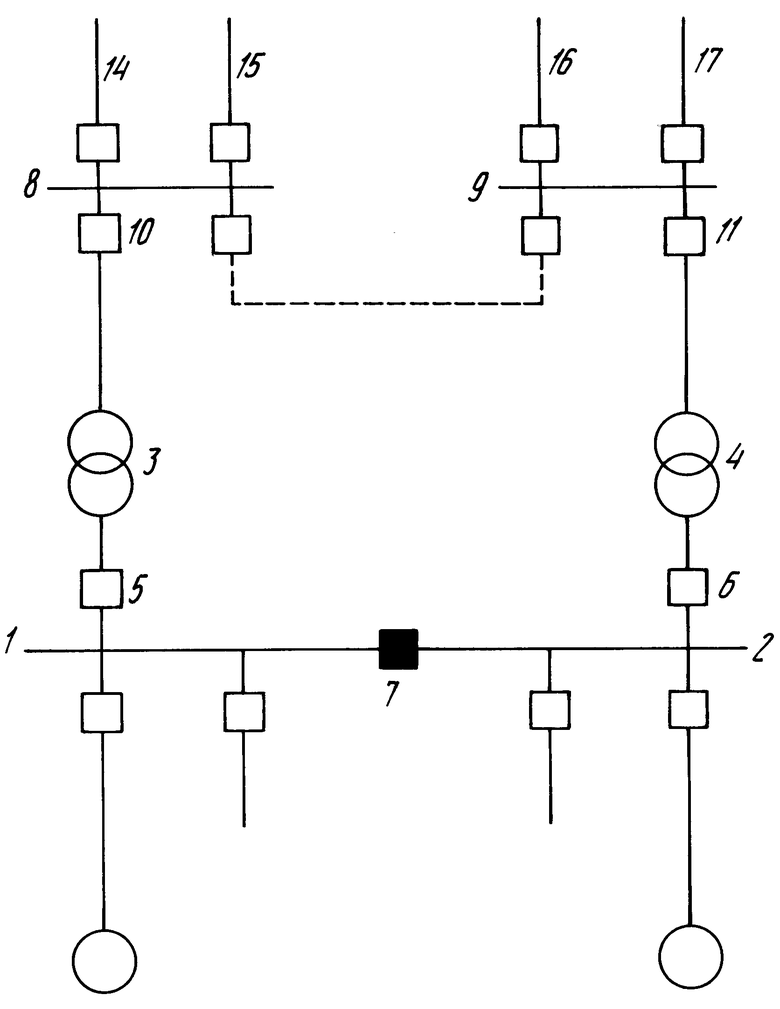
Способ управления автоматическим включением резервного питания, согласно которому фиксируют короткое замыкание в питающей сети, выявляют повредившийся ввод или ложное отключение выключателя этого ввода и формируют команду на включение резервного источника питания и на отключение указанного рабочего ввода, отличающийся тем, что команду на подключение резервного источника питания формируют по факту фиксации короткого замыкания в питающей сети или по факту ложного отключения выключателя ввода, а команду на отключение рабочего ввода по факту выявления повредившегося рабочего ввода.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Галицын А.А., Зазернюк А.Ф | |||
| Опережающее АВР на подстанциях магистральных нефтепроводов | |||
| Промышленная энергетика | |||
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления автоматическим вводом резервного питания | 1971 |
|
SU505087A1 |
