Изобретение относится к технологии выполнения ремонтных работ на внешних поверхностях подводных объектов и касается разработки способа подводной очистки внешних поверхностей корпусов судов и других конструкций, погруженных в жидкость.
Известен способ подводной очистки судов, включающий обработку погруженных в жидкую фазу поверхностей посредством зачистных устройств, выполненных в виде совокупности высоконапорных сопел с подводящими патрубками, перемещающихся в пространстве при помощи несущей рамы, имеющей ось вращения и соединенной с внешним постом управления (см.US, патент США N 4462328, кл B 63 B 59/10, опублик. 1984).
Однако известный способ является низкоэффективным и длительным по времени его реализации при сочетании значительной адгезии разделяемых материалов и сложного профиля обрабатываемой поверхности в случае наличия малых радиусов кривизны ее отдельных участков.
Технический результат при реализации описываемого способа подводной очистки судов заключается в повышении эффективности и сокращении длительности этой очистки при наличии сочетания адгезии разделяемых материалов и сложного профиля обрабатываемой поверхности в случае наличия малых радиусов кривизны ее отдельных участков.
Этот технический результат достигается тем, что при реализации способа подводной очистки судов, включающего обработку погруженных в жидкую фазу поверхностей посредством зачистных устройств, выполненных в виде совокупности высоконапорных сопел с подводящими патрубками, перемещающихся в пространстве при помощи несущей рамы, имеющей ось вращения и соединенной c внешним постом управления, работающие в режиме переменного напора сопла объединяют в группы, центры вращения которых располагают на различных расстояниях относительно друг друга и от оси вращения несущей рамы, при этом расстояние от центра вращения до внешнего среза соответствующих сопел и их пространственную ориентацию выбирают переменными в пределах каждой группы.
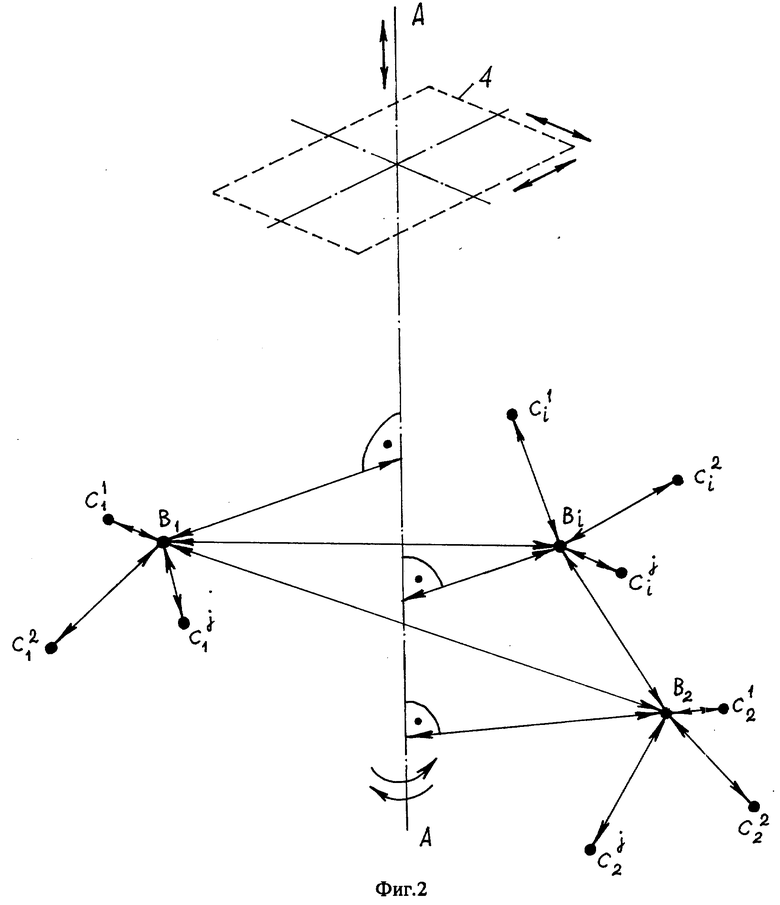
На фиг. 1 дано аксонометрическое изображение схемы примера реализации описываемого способа подводной очистки корпуса судна; на фиг. 2 схема взаимного расположения технических средств, необходимых для реализации вышеупомянутого способа.
Способ очистки согласно настоящему изобретению заключается в том, что погруженную в жидкую среду 1 поверхность 2, например, корпус судна, обрабатывают посредством зачистных устройств, которые выполняют в виде совокупности высоконапорных сопел Cijc подводящими патрубками 3, которые перемещают в пространстве при помощи несущей рамы 4, имеющей ось вращения 5 и соединенной с внешним постом управления (не показан). Сопла Cij, работающие в режиме переменного напора, объединяют в группы, центры вращения Bj которых располагают на различных расстояниях друг от друга (B1B2≠ B1Bi≠.≠B2Bi) и от оси 5 вращения несущей рамы 4 (AB1≠AB2≠. ≠ABi), при этом расстоянии от центра Bi вращения до внешнего среза соответствующих сопел Cij и их пространственную ориентацию выбирают переменными в пределах каждой группы. Одновременно с этим рама 4 может осуществлять возвратно-поступательное движение в различных направлениях в декартовой системе координат.
Реализация описываемого способа подводной очистки судов осуществляется следующим образом. Жидкую фазу с помощью системы подводящих патрубков 3 подают под избыточным давлением в высоконапорные сопла Cij. При этом сопла Cij могут быть выполнены в виде сопел-клавиаторов, в которых происходит последовательное возрастание поперечных пульсаций скорости потока и его ускорение с последующим образованием ядер кавитации и пузырьков газа, вытесняемых в пространство, ограниченное внешней кромкой сопел Cij и обрабатываемой поверхностью 2, погруженной в жидкую среду 1. Происходящее при этом схлопывание пузырьков вызывает эрозионное разрушение примесных компонентов с последующим их удалением из зоны контакта. Сопла-кавиаторы могут иметь различные конструктивные свои выполнения. В процессе очистки имеет место сложное перемещение высоконапорных сопел Cij, определяемое их вращением вокруг соответствующих центров Bi, а также вращением рамы 4 вокруг оси (т.е. вокруг точки А согласно фиг. 1). Кроме того, в процессе очистки происходит возвратно-поступательное движение рамы 4 в различных направлениях в декартовой системе координат в соответствии с командами, подаваемых с внешнего поста управления. При этом скоростные и режимные параметры зачистных устройств регулируют в зависимости от прочностных и геометрических характеристик обрабатываемой поверхности.
Обеспечение режима переменного напора сопел Cij, объединенных в группы, центры вращения которых расположены на различных расстояниях от оси вращения 5 рамы 4, позволяет максимально увеличивать площадь обработки поверхности 2 с учетом ее геометрических особенностей и прочностных характеристик примесного компонента. При этом наибольший положительный эффект достигают в том случае, когда расстояние от центра вращения до внешнего среза соответствующих сопел и их пространственная ориентация являются переменными в пределах каждой группы сопел Cij.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАЗДЕЛЕНИЯ ТВЕРДЫХ ФАЗ | 1995 |
|
RU2094121C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПОГРУЖЕННЫХ В ЖИДКОСТЬ ПОВЕРХНОСТЕЙ | 1999 |
|
RU2152331C1 |
| УСТРОЙСТВО ДЛЯ ПОДВОДНОЙ ОЧИСТКИ СУДОВ И ПОГРУЖЕННЫХ КОНСТРУКЦИЙ | 1993 |
|
RU2076824C1 |
| УСТРОЙСТВО ДЛЯ ГИДРОКАВИТАЦИОННОЙ ОЧИСТКИ ПОВЕРХНОСТЕЙ ПОД ВОДОЙ | 2013 |
|
RU2522793C1 |
| Многогорелочная закрытая факельная установка, способ сжигания газа на этой установке и устройство горелки многогорелочной закрытой факельной установки | 2023 |
|
RU2817903C1 |
| ИНСТРУМЕНТ ДЛЯ ПОДВОДНОЙ ОЧИСТКИ ПОВЕРХНОСТИ И СОПЛО ДЛЯ ИНСТРУМЕНТА | 2000 |
|
RU2163877C1 |
| УСТРОЙСТВО ДЛЯ ГИДРОДИНАМИЧЕСКОЙ ОЧИСТКИ ПОВЕРХНОСТЕЙ (ВАРИАНТЫ) | 1999 |
|
RU2168440C1 |
| Устройство для скважинной гидродобычи полезных ископаемых | 2022 |
|
RU2786980C1 |
| СПОСОБ ФОРМИРОВАНИЯ ШЛИФОВАЛЬНОГО КРУГА ИМПУЛЬСНОЙ ВОДЯНОЙ СТРУЕЙ | 2009 |
|
RU2407629C1 |
| СПОСОБ ПОДАЧИ МАСЛА В МЕЖРОТОРНЫЙ ПОДШИПНИК ОПОРЫ РОТОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2613964C1 |
Изобретение относится к технологии выполнения ремонтных работ на внешних поверхностях подводных объектов и касается разработки способа подводной очистки внешних поверхностей корпусов судов и других конструкций, погруженных в жидкость. Сущность изобретения состоит в том, что при реализации способа подводной очистки судов, включающего обработку погруженных в жидкую фазу поверхностей посредством зачистных устройств, выполненных в виде совокупности высоконапорных сопел с подводящими патрубками, перемещающихся в пространстве с помощью несущей рамы, имеющей ось вращения и соединенной с внешним постом управления, работающие в режиме переменного напора сопла объединяют в группы, центры вращения которых располагают на различных расстояниях относительно друг друга и от оси вращения несущей рамы, при этом расстояние от центра вращения до внешнего среза соответствующих сопел и их пространственную ориентацию выбирают в пределах каждой группы. 2.ил.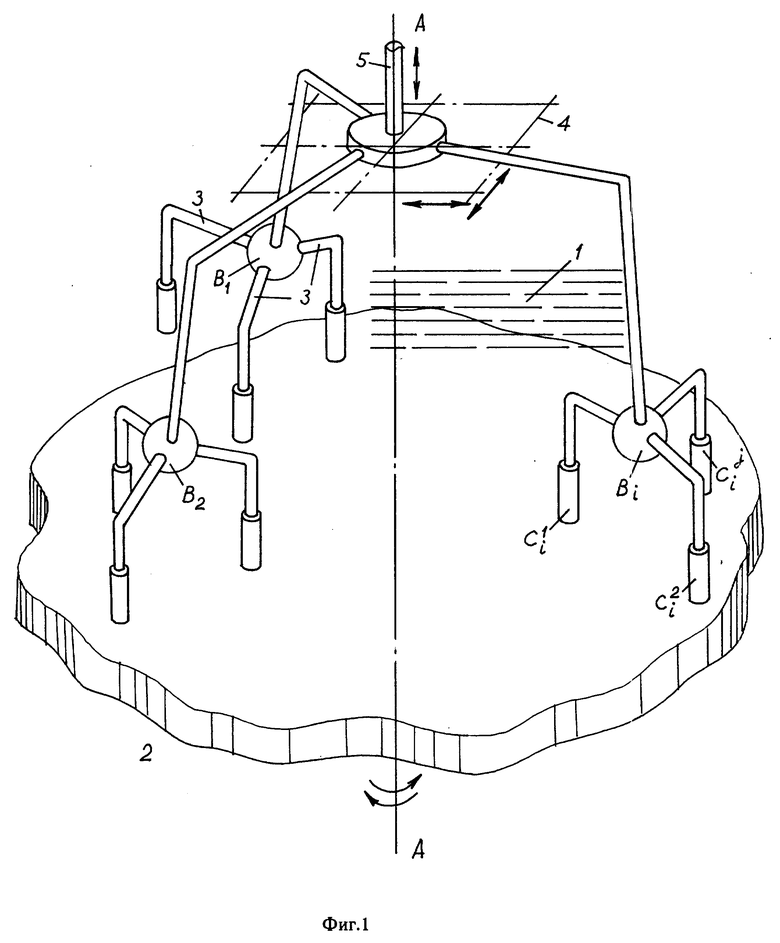
Способ подводной очистки судов, включающий обработку погруженных в жидкую фазу поверхностей посредством зачистных устройств, выполненных в виде совокупности высоконапорных сопел с подводящими патрубками, перемещающихся в пространстве при помощи несущей рамы, имеющей ось вращения и соединенной с внешним постом управления, отличающийся тем, что работающие в режиме переменного напора сопла объединяют в группы, центры вращения которых располагают на различных расстояниях относительно друг друга и от оси вращения несущей рамы, при этом расстояния от центра вращения до внешнего среза соответствующих сопел и их пространственную ориентацию выбирают переменными в пределах каждой группы.
| Патент США N 4462328, кл В 63 В 59/10, 1984. |
