Изобретение относится к измерениям и может быть использовано на транспортных средствах и в технологических установках для неконтактного определения скорости движения объектов.
Известны способы неконтактного измерения относительной скорости V подвижных объектов, основанные на корреляционной обработке сигналов двух датчиков (оптических, ультразвуковых, температурных, радиационных и т.п.), размещенных по вектору скорости объекта на базовом расстоянии B. Вычисляя абсциссу максимума взаимно корреляционной функции (ВКФ) этих сигналов, определяют транспортную задержку tз запаздывающего сигнала по сравнению с опережающим и, зная базовое расстояние B между датчиками, вычисляют скорость движения объекта, которая при отсутствии помех равна V B/tз [1]
Однако непосредственное вычисление абсциссы максимума ВКФ имеет низкую точность из-за гладкости реальных ВКФ, что приводит к малому изменению значения функции при достаточно большом изменении аргумента вблизи точки максимума. Стремление повысить точность путем фиксации нулевого значения первой производной от ВКФ [2] приводит к усложнению алгоритма обработки, требующего высокоточной фильтрации, ортогонализации, взаимно ортогональной корреляции, операций умножения и т. п. Кроме того, при условии изменяемости диапазона измеряемых скоростей во времени для любой модификации корреляционных способов измерения скорости необходимо обеспечить режимы слежения и адаптации, что приводит к дополнительному усложнению алгоритмов и повышению соответствующих стоимостных затрат.
Наиболее близким по технической сущности цифровые измерители скорости подвижных объектов [3] основанные на корреляционных способах измерения, содержат расположенные на расстоянии друг от друга два датчика, соединенные с соответствующими дискретизаторами, один из которых подключен к линии задержки, генератор тактовых импульсов, блок обработки сигналов с корреляционным дискриминатором, устройством стабилизации уровня сигнала в виде системы типа автоматической регулировки усиления (АРУ) и устройством адаптации к изменению диапазона измеряемых скоростей, блок вычисления скорости и индикации. Однако повышение точности измерения скорости и диапазона измеряемых скоростей в этих устройствах достигается за счет усложнения их схемного состава, а применение в них дополнительных структур в виде контуров слежения и стабилизаторов уровней сигналов приводит к сниженю быстродействия аппаратуры и повышению затрат на ее изготовление и эксплуатацию.
Техническая задача, решаемая предлагаемым способом и устройством для его осуществления, заключается в упрощении алгоритма определения транспортной задержки, расширении динамического диапазона измеряемых скоростей, снижении уровня систематических ошибок.
Это достигается тем, что в известном способе неконтактного измерения транспортной задержки подвижных объектов, заключающемся в том, что формируют два сигнала, соответствующие положению объекта в двух пространственно разнесенных по вектору скорости точках, эти сигналы оцифровывают, осуществляют узкополосную цифровую фильтрацию обоих цифровых сигналов, определяют соответственные точки пересечения нулевого уровня отфильтрованными колебаниями, подсчитывают число периодов дискретизации между соседними точками пересечения этими колебаниями нулевого уровня и определяют транспортную задержку между ними, соответствующую скорости движения объекта.
В устройстве для осуществления указанного способа, содержащем два датчика отраженного излучения, разнесенных пространственно по вектору скорости движения объекта, датчики подключены соответственно к входам первого и второго аналого-цифровых преобразователей (АЦП), выходы которых подключены к первому и второму входам цифрового блока обработки сигналов, выход которого подключен к последовательно соединенным блоку вычисления скорости и индикатору, блок обработки сигналов снабжен счетчиком тактовых импульсов и выполнен в виде двух идентичных каналов, каждый из которых содержит последовательно соединенные цифровой резонатор и нуль-индикатор, выходы нуль-индикаторов подключены к соответствующим первому и второму входам счетчика тактовых импульсов, а выход генератора тактовых импульсов соединен одновременно с управляющими входами первого и второго АЦП и с третьим входом счетчика тактовых импульсов.
На фиг. 1 приведены эпюры колебаний u1(t) и u2(t) на выходах датчиков отраженного сигнала; на фиг. 2 эпюры квазигармонических колебаний v1(t) и v2(t) после операции узкополосной цифровой фильтрации;на фиг. 3 структурная схема устройства, реализующего заявленный способ.
Два сигнала, соответствующие положению объекта в разнесенных по вектору скорости точках, показаны на эпюрах на выходах датчиков, причем первый сигнал опережает второй. Эти сигналы оцифровывают, а затем подвергают узкополосной цифровой фильтрации. В результате образуются квазигармонические колебания, показанные на соответствующих эпюрах, имеющие фазовый сдвиг, пропорциональный времени задержки между входными сигналами. Затем фиксируют соответственные точки перехода этими колебаниями через нулевой уровень (например, снизу вверх). При этом для однозначности отсчета максимальное время задержки должно быть меньше "периода" квазигармонических колебаний, что определяет центральную частоту узкополосной фильтрации, которая должна быть меньше величины, обратной к максимальной транспортной задержке. При этом точка пересечения нулевого уровня вторым колебанием не опережает точку следующего пересечения нулевого уровня первым квазигармоническим колебанием. Величину транспортной задержки рассчитывают по подсчету числа периодов дискретизации между соответственными точками пересечения нулевого уровня квазигармоническими колебаниями. Величина измеряемой скорости равна отношению расстояния между сигналами (базы) к транспортной задержке.
Увеличение частоты дискретизации приводит к снижению уровня систематической ошибки измерения времени задержки и, позволяя измерять малые задержки, расширяет динамический диапазон измеряемых скоростей в область высоких скоростей. Выбор центральной частоты узкополосной фильтрации из условия f<1/tзmax, где tзmax максимальная транспортная задержка, определяет нижнюю границу измеряемых скоростей.
Поскольку момент пересечения нулевого уровня квазигармоническим колебанием не зависит от его интенсивности, то не требуется адаптации к уровню сигнала, что упрощает алгоритм обработки и повышает его быстродействие.
Устройство для осуществления способа содержит первый и второй датчики отраженного сигнала 1 и 2, соединенные с первыми входами первого и второго аналого-цифровых преобразователей (АЦП) 3 и 4, выходы которых подключены соответственно к первому (I) и второму (II) входам цифрового блока обработки сигналов 5, в который входят цифровые резонаторы первого и второго каналов 6 и 7, нуль-индикаторы первого и второго каналов 8 и 9, выходы которых подключены соответственно к первому (I) и второму (II) входам счетчика тактовых импульсов 10, выход которого соединен последовательно с блоком вычисления скорости 11 и индикатором 12, генератор тактовых импульсов 13, выход которого одновременно соединен с управляющими входами (II) первого и второго АЦП 3 и 4 соответственно, и с третьим входом (III) счетчика тактовых импульсов 10.
Устройство работает следующим образом.
С помощью датчиков 1 и 2, например, оптических, ультразвуковых или радиационных, разнесенных пространственно по вектору скорости движения объекта, формируют два электрических сигнала, причем сигнал от первого датчика 1 опережает сигнал от второго датчика 2. Эти сигналы оцифровывают с помощью АЦП 3 и 4, управляемых от генератора тактовых импульсов 13 по соответствующим входам (II). Полученные цифровые сигналы поступают в двухканальный цифровой блок обработки сигналов 5, на цифровые резонаторы 6 и 7 соответственно. Отфильтрованные резонаторами 6 и 7 квазигармонические колебания поступают на соответствующие нуль-индикаторы 8 и 9. Нуль-индикаторы 8 и 9 фиксируют нуль-точки моменты перехода соответствующими квазигармоническими сигналами нулевого уровня снизу вверх. Начиная с момента обнаружения нуль-точки нуль-индикатором 8 в первом канале и выработкой им же команды включения счетчика тактовых импульсов 10 по входу (I) и до момента обнаружения нуль-точки во втором канале нуль-индикатором 9 и выработки им же команды выключения счетчика 10 по входу (II), производится подсчет числа периодов колебаний генератора тактовых импульсов 13, поступающих на вход (III) счетчика, до момента обнаружения нуль-точки во втором канале нуль-индикатором 9, который вырабатывает команду выключения счетчика 10 по входу (I). Таким образом, счетчик 10 запускается по входу (I) и останавливается по входу (II), а на его третий (III) вход поступают сигналы от генератора тактовых импульсов 13 синхронно с импульсами, идущими на управляющие (II) входы АЦП 3 и 4. Счетчик тактовых импульсов 10 подсчитывает число n импульсов периодов дискретизации T, находящихся между соседними точками пересечения нулевого уровня квазигармоническими колебаниями, пропорциональное времени задержки второго сигнала относительного первого, и это число n поступает в блок вычисления скорости 11, при этом скорость определяется формулой V B/(nT) и индицируется с помощью индикатора 12, например светового информационного табло. При этом темп выдачи информации о текущей скорости на индикаторе 12 численно совпадает с резонансной частотой цифровых резонаторов 6 и 7.
Блок обработки сигналов содержит только два идентичных цифровых резонатора (например, рекурсивных фильтра второго порядка), два идентичных нуль-индикатора и один счетчик тактовых импульсов, в результате чего схемный состав прост. Упрощение аппаратурной реализации устройства приводит к снижению стоимостных затрат на разработку, изготовление и эксплуатацию устройства, упрощает возможность проведения тестирования, повышает надежность устройства. Повышается также и достоверность измерений в большем диапазоне измеряемых скоростей поскольку не требуется применять сложные (высоких порядков) контуры слежения и адаптации.
Исследования компьютерной модели измерителя скорости, основанного на предложенном способе измерения, для трековых испытаний автомобилей с датчиками отраженного сигнала в виде фотоприемников показали, что уровень средней относительной ошибки измерения скорости не превышает 0,5% (при частоте дискретизации 14 кГц) в широком диапазоне измерения скорости Vmax/Vmin 30.50 и при отношении сигнал/шум 40 дБ на выходах цифровых резонаторов. Случайные ошибки измерения скорости обусловлены собственными шумами датчиков, АЦП и цифровых резонаторов, суммарный уровень которых в практических ситуациях не превосходит -40.-60 дБ относительно уровня сигналов.

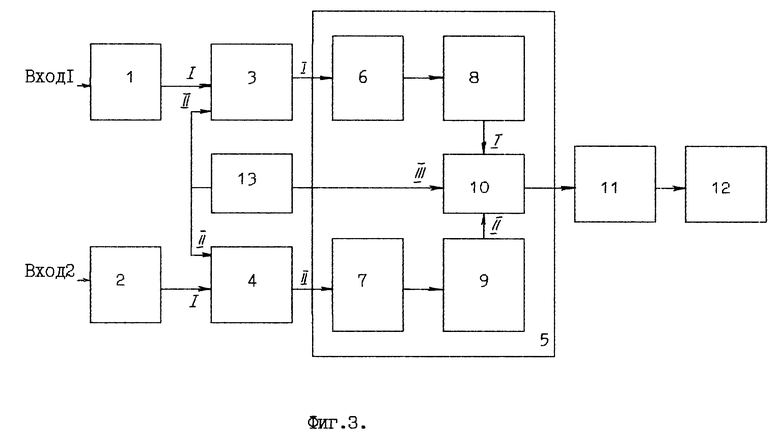
Использование: для неконтактного измерения скорости объектов на транспортных средствах и в технологических установках. Сущность изобретения: способ заключается в том, что два сигнала, соответствующих положению объекта в двух пространственных точках, оцифровывают и подвергают узкополосной цифровой фильтрации. Фиксируют соответственные нуль-точки перехода полученными квазигармоническими колебаниями через нуль снизу вверх, и подсчитывая число периодов дискретизации в интервале между нуль-точками, определяют время задержки и соответствующую скорость объекта. Устройство содержит расположенные на расстоянии датчики 1 и 2, соединенные с дискретизаторами 3 и 4, управляемыми от генератора тактовых импульсов 13, выходы дискретизаторов соединены с входами двухканального цифрового блока обработки 5 с цифровыми резонаторами 6 и 7 и нуль-индикаторами 8 и 9, соответственно, и вырабатывает команды попеременного включения и выключения счетчика тактовых импульсов 10, подсчитывающего число периодов колебаний от генераторов 13 в интервале между включением и выключением, блок вычисления скорости 11 преобразует это число в скорость, которая индицируется с помощью индикатора 12. 2 с.п. ф-лы, 3 ил.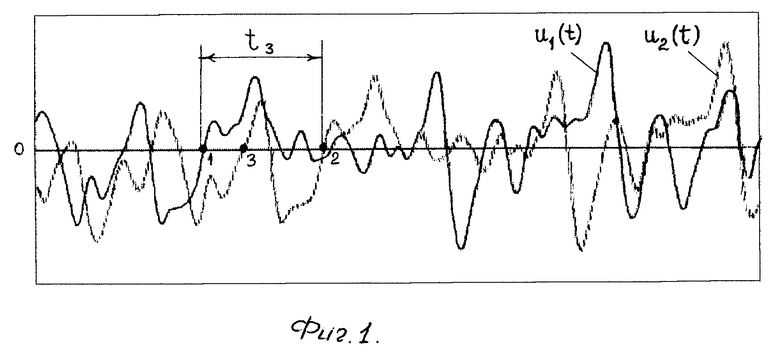
| Белоглазов И.Н., Тарасенко В.П | |||
| Корреляционные экстремальные системы | |||
| - М.: Сов.радио, 1974, с.9 - 16 | |||
| Астапов Ю.М., Васильев Д.В., Заложнев Ю.И | |||
| Теория оптикоэлектронных следящих систем | |||
| - М.: Наука, 1988, с.233 - 240 | |||
| Васильев Д.В., Денисов С.А., Серебряков С.А | |||
| Исследование адаптивного корреляционного измерителя скорости с применением математического моделирования | |||
| - М.: МЭИ, 1985,Вестник Московского энергетического института N 2. |
