Предлагаемое устройство относится к средствам управления, а более конкретно, к системам передачи информации, в которых как минимум один из пунктов (пункт передачи и/или пункт информации) является подвижным.
Передача информации на определенное расстояние находит применение практически во всех областях народного хозяйства и в военной технике. При этом от технических особенностей средств и линий передачи информации зависит и качество, и надежность передачи.
Известны системы передачи информации по проводам [1]
Такие системы состоят, как правило, из командно-шифраторного блока (телефонного аппарата), находящегося на командном (передающем) пункте (у оператора), линии связи (линии передачи информации между пунктами передачи и приема информации) и дешифратно-исполнительного блока, размещенного на приемном пункте (на борту боевой машины, управляемой ракеты и др.). Проводные линии таких систем отличаются высокой помехоустойчивостью от случайных и организованных помех, простотой устройства аппаратуры и эксплуатации. Однако проводная система передачи имеет недостатки: трудно обеспечить размотку провода при больших скоростях приемного пункта (ракеты), поэтому скорость объекта управления (приемного пункта) ограничивается. Кроме того, передача информации может происходить только с неподвижного пункта передачи (командного пункта), так как в противном случае проводная линия связи выходит из строя.
Известны также системы передачи информации, например, в танковом подразделении, содержащие установленные на передающем пункте (например, командирском танке) пульт управления оператора, визирное устройство и соединенный с ним кинематически привод наведения, последовательно соединенные передатчик и антенну, а также установленные на приемном пункте (на линейном танке) последовательно соединенные приемное устройство, сопряженное с антенной передающего пункта, первый демодулятор и исполнительные органы [2]
Эта система является прототипом предлагаемой. Радиосвязь между пунктом приема и передачи информации имеет преимущество перед проводной: она не ограничивает скорость перемещения пунктов приема и передачи информации друг относительно друга. Радиосвязь обеспечивает передачу информации и в тех случаях, когда между пунктами приема и передачи имеются непреодолимые препятствия, например, водные преграды, болотистая местность и др. Наличие устройства и его привода позволяют получить достоверные данные (для военных объектов) о координатах целей и местных предметов, а также о местоположении и состоянии пункта приема передачи. Кроме того, такие системы передачи информации могут быть использованы (например, в программе конверсии) при создании больших информационных систем на основе разнообразных вычислительных средств, компьютерных и телевизионных сетей, расположенных как на передающем, так и на приемном пунктах, удаленных друг от друга на значительные расстояния.
Однако эта система имеет недостатки: низкие помехоустойчивость и скрытность. Оба недостатка существенно ограничивают применимость такой системы как в военных целях, так и в народнохозяйственных.
Целью настоящего изобретения является повышение помехозащищенности, скрытности и надежности передачи информации, а вместе с этим и улучшение эргономических условий деятельности оператора.
Указанная цель достигается тем, что в известную систему передачи информации введены, установленные на передающем пункте индикатор захвата, привод антенны, кинематически связанный с антенной, источник информации, выход которого соединен со входом передатчика, последовательно соединенные дальномер, блок дальности, привод оптического приемника, оптический приемник, координатор, блок захвата, управляемый коммутатор, второй вход которого соединен со вторым выходом координатора, масштабирующий блок, согласующее устройство и переключатель, второй вход которого соединен с выходом пульта управления оператора, а выход со входом привода наведения, установленные на приемном пункте последовательно соединенные приемник информации, вход которого соединен со вторым выходом демодулятора, и запоминающее устройство, а также соединенные последовательно датчик поступления информации, вход которого соединен с вторым выходом приемного устройства, блок включения и источник светового излучения, второй вход которого кинематически соединен с приемным устройством, а выход оптически сопряжен с оптическим приемником светового излучения, при этом первый вход привода антенны электрически соединен с выходом блока дальности, а сама антенна выполнена узконаправленной, визирное устройство кинематически соединено с приводами антенны и оптического приемника светового излучения, а его второй вход соединен через индикатор захвата со вторым выходом блока захвата.
Изобретение поясняется чертежом, на котором показано взаимное расположение и связи элементов предлагаемой системы передачи информации. Новые элементы и связи показаны пунктиром. Сплошными линиями показаны элементы и связи прототипа. При этом одинарными линиями обозначены оптические и электрические связи, а двойными механические (кинематические). На чертеже приняты следующие обозначения: 1 передающий пункт (ПП1); 2 приемный пункт (ПП2); 3 источник информации (ИИ); 4 блок дальности (БД); 5 - дальномер (Д); 6 демодулятор (ДМ); 7 исполнительные органы (ИО); 8 - передатчик (ПЕР); 9 привод антенны (ПА), 10 антенна (А); 11 приемное устройство (ПУ); 12 приемник информации (ПИ); 13 оператор (О); 14 - визирное устройство (ВУ); 15 привод оптического приемника (ППР); 16 датчик поступления информации (ДПИ); 17 запоминающее устройство (ЗУ); 18 пульт управления оператора (ПУО); 19 привод наведения (ПН); 20 оптический приемник (ОПР); 21 источник светового излучения (ИСИ); 22 блок включения (БВ); 23 переключатель (П); 24 координатор (К); 25 согласующее устройство (СУ); 26 масштабирующий блок (МБ); 27 управляемый коммутатор (УК); 28 индикатор захвата (ИЗ); 29 блок захвата (БЗ).
Блоки 1, 2, 6-8, 11, 13, 14, 18 и 19 являются составными элементами прототипа и других подобных систем (например, "Танк Т-80". Техническое описание и инструкция по эксплуатации. Кн.1. М. Воениздат, 1979, с.25, 31. 160-184, 205-215, 225-229; "Руководство по материальной части и эксплуатации колесного бронетранспортера БТР-60ПБ", М. Воениздат, 1967, с. 25, 359-372). Их работа и устройство широко известны (см. там же и дополнительно: "Радиотехнические системы: Учеб. для вузов по спец. "Радиотехника". Ю.П.Гришин, В. П.Ипатов, Ю.М.Казаринов и др. Под ред. Ю.М.Казаринова. М. Высш. шк. 1990. 496).
Блоки 3-5, 9, 10, 12, 15-17, 20-29 являются новыми. Конструктивное использование источника информации 3 определяется видом передаваемой информации и типом сигналов (звуковые, телеграфные, телевизионные и др. см. например, "Радиотехнические системы."; Под ред. Ю.М.Казаринова. -М. Высш. шк. 1990. с. 4 10). Особенности функционального и конструктивного исполнения блока дальности 4 и дальномера 5 широко известны (см. например, В.А.Орлов "Лазеры в военной технике", М. Воениздат, 1976, с.43-75). Привод 9 антенны 10 выполнен на основе электропривода (см. например, В.В.Корнеев и др. "Основы автоматики и танковые автоматические системы", М. ВАБТВ, 1976, с. 476 518) и служит для юстировки (согласования) осей антенн 10 и визирного устройства 14 в зависимости от измеренной дальности и параллакса антенн и визирного устройства 14, вызванного особенностями их размещения на передающем пункте 1. Для определения угла поворота антенны 10 относительно визирного устройства 14 в составе привода 9 предусмотрено счетно-решающее устройство. Это необходимо, так как антенна для повышения помехоустойчивости и скрытности выполнена узконаправленной, то есть, имеет узкую диаграмму направленности (в горизонтальной плоскости 1,5 2o), что при значительном изменении дальности между приемным и передающим пунктами при их движении, а также значительном параллаксе антенны относительно визирного устройства может ухудшить качество радиосвязи, или же полностью ее сорвать (в случае ненакрытия радиолучом цели). Приемник информации 12 принимает информацию, полученную с выхода демодулятора и при необходимости преобразует ее к виду, удобному для запоминания в запоминающем устройстве 17. Привод оптического приемника 15 выполняет по отношению к оптическому приемнику 20 такую же функцию, как и привод антенн 9 по отношению к самой антенне 10, то есть, обеспечивает юстировку осей визирного устройства 14 и приемника 20 в зависимости от измеренной дальности и параллакса приемника относительно визирного устройства, для чего привод оптического приемника 15 соединен с выходом блока дальности 4 и в его состав также включен счетно-решающий прибор. Датчик поступления информации 16 представляет собой резонансный контур, настраиваемый на несущую частоту радиоизлучения, поступающего на приемное устройство 11. При поступлении такого излучения на выходе блока 16 формируется соответствующий сигнал, обеспечивающий срабатывание блока включения 22, благодаря чему источник светового излучения 21 включается на излучение. Источник 21 кинематически связан и съюстирован с приемным устройством 11. Он использует инфракрасный спектр излучения, благодаря чему обеспечивается его скрытность, а само излучение кодируется, что обеспечивает не только скрытность, но и помехоустойчивость передачи. Оптический приемник светового излучения 20, благодаря блоку 15, съюстирован с блоком 14 и при визировании последним приемного пункта 2 сопрягается оптически с источником светового излучения 21. Переключатель 23 обеспечивает переключение сигналов, подаваемых на вход привода наведения 19 либо с пульта управления оператора 18, либо с согласующего устройства 25. Координатор 24 преобразует оптический сигнал в электрический и определяет координаты блока 21 относительно оптической оси блока 20 (см. например, Л.П.Лазарев Инфракрасные и световые приборы. Изд-во "Машиностроение", М. 1966, с.278-332). С входа блока 24 сигнал поступает на входы блоков 27 и 29. Блок захвата обеспечивает декодирование и распознавание принятого сигнала (см. там же). В случае поступления "своего" сигнала обеспечивается срабатывание блока захвата 29, который выполнен на основе реле и обеспечивает срабатывание управляемого коммутатора 27 и индикатора захвата 28. Управляемый коммутатор 27 обеспечивает подачу принятого сигнала с выхода блока 24 на вход блока 26. Масштабирующий блок 26 и согласующее устройство 25 обеспечивают согласование сигнала с выхода координатора 24 (особенности которого зависят от типа используемого координатора) по амплитуде и фазе с входными характеристиками привода наведения 19. Кроме того, согласующее устройство 25 учитывает и динамику блоков 24 и 19, для чего конструктивно выполнено на основе динамических звеньев в различной степенью инерционности и форсировки (см. например, В.В.Корнеев и др. Основы автоматики и танковые автоматические системы. М. ВАБТВ, с.39-79). Индикатор захвата 28 выполняется на основе светодиода или сигнальной лампочки. Устанавливается в поле зрения визирного устройства 14 и оператора 13 (см. там же).
Работает предлагаемая система следующим образом. Оператор 13 включает систему, в том числе блоки 3, 4, 5, 8, 9, 15, 18-20, 24. Выходит на связь по телефону или радио (в зависимости от условий использования и типа системы связи между объектами) с приемными пунктом 2 для сопряжения блоков 10, 14 и 20 с 11, а также включения (оператором приемного пункта 2) приемного устройства 11, исполнительных органов 7 и приемника информации 12 на приемном пункте 2. Устанавливает переключатель 23 в первое положение, в котором на вход привода наведения 19 подключается выход пульта управления наводчика 18. Воздействуя на органы управления пульта управления оператора 18, оператор 13 посредством привода наведения 19 совмещает визир визирного устройства 14 с приемным устройством 11 приемного пункта 2 и производят замер дальности, нажимая кнопку измерения дальности на блоке управления дальномера 5. Сигнал, соответствующий значению измеренной дальности, формируется на выходе блока дальности 4 и подается затем на входы приводов антенны 10 и приемника 15, которые изменяют угловое положение антенны и приемника таким образом, чтобы съюстировать их с оптической осью визирного устройства 11 на измеренной дальности. Величины поправок зависят от параллаксов блоков 10 и 20 относительно визирного устройства 14 и от расстояния между пунктами передачи 1 и приема 2. Кроме того, информация об измеренной дальности приема 2. Кроме того, информация об измеренной дальности с выхода блока дальности 4 посредством цифрового индикатора дальности (на рисунке не показан) представляется оператору 13 в поле зрения визирного устройства 14. На основании информации об измеренной дальности счетно-решающие устройства приводов антенны 9 и приемника 15 определяют величины угловых поправок, отрабатывая которые, приводы 10 и 15 изменяют угловое положение антенны 10 и приемника 20 относительно линии визирования визирного устройства 14 таким образом, чтобы их продольные оси пересеклись с линией визирования в месте нахождения приемного пункта 2. Благодаря этому повышается эффективность передачи информации и прежде всего ее надежность.
Убедившись в правильности измеренной дальности, оператор вначале проверяет надежность функционирования системы передачи информации, для чего включает источник информации 3 с контрольной информацией и передатчик 8 на передачу. Передатчик 8 обеспечивает модуляцию радиосигналов и передачу их через антенну 10 на приемный пункт 2, где приемное устройство 11 и демодулятор 6 обеспечивают преобразование радиосигналов и подачу их на входы блоков 7 (как в прототипе) и 12. Кроме того, со второго выхода приемного устройства 11 принятый сигнал поступает на вход датчика поступления информации 16, который выполняет функции определителя "своего" сигнала (благодаря наличию резонансного контура, настраиваемого заранее на заданную несущую частоту радиосигнала). В случае приема сигнала "своей" частоты на выходе блока 16 формируется сигнал, обеспечивающий срабатывание блока включения 22, а следовательно, и подключение источника светового излучения 21 к системе электроснабжения приемного пункта 2. В результате источник светового излучения формирует кодированный световой сигнал в направлении оптического приемника 20 (поскольку блок 21 кинематически связан с блоком 11 и их оси согласованы). В оптическом приемнике 20 принятое световое излучение преобразуется посредством оптической формирующей системы в оптический сигнал (см. например, Л.П.Лазарев. Инфракрасные и световые приборы. М. Машиностроение, 1966, с. 278-332), который подается на вход блока 24. С входа координатора 24 сигнал поступает на вход блока захвата 29 для его включения, благодаря чему достигается подача на управляемый коммутатор 27 напряжения для его переключения в положение, обеспечивающее соединение блоков 24 и 26. Благодаря этому обеспечивается подача принятого оптическим приемником 20 и преобразованного блоком 24 полезного сигнала на масштабирующий блок 26 и далее согласующее устройство 25. С выхода блока захвата 29 сигнал подается и на вход блока 28, обеспечивающего оператора 13 информацией (в поле зрения визирного устройства 14) о произведенном захвате координатором 24 и блоком захвата 29 источника светового излучения 21. Получив эту информацию, оператор 13 может переключить переключатель 23 во второе положение, благодаря чему привод наведения 19 отключается от блока 18 и подключается к выходу согласующего устройства 25. В результате этого образуется замкнутый контур, представляющий собой автоматическую замкнутую систему (следящую), в которую входят блоки 14, 15, 20, 24, 27, 26, 25, 23 и 19. Регулируемой характеристикой в этой системе является угловое положение оптической оси визирного устройства 14 относительно источника светового излучения 21, информация о чем формируется на входе координатора 24 (благодаря его [ жесткой связи с оптическим приемником 20 и кинематической через блок 15 с визирным устройством 14). Эта следящая система обеспечивает автоматическое совмещение оптической оси оптического приемника 20 с источником светового излучения 21, а вместе с этим и с приемным пунктом 2.
Убедившись в надежном функционировании системы передачи информации в автоматическом режиме (по индикатору захвата 28 и визуально через визирное устройство 14), оператор включает в источнике информации 3 блок с полезной информацией, предназначенной для передачи на приемный пункт 2. Если в качестве источника 3 и приемника 12 информации используется персональные компьютеры (см. например, Технические предложения фирмы АОЗТ "Астрасофт" по организации закрытой корпоративной коммуникационной системы. М. Издание АОЗТ "Астрасофт", 1994, с.1-5), то управление передачей информации осуществляется с помощью специального программного обеспечения, встроенного в компьютеры (используемые в качестве блоков как 3, так и 12). Для решения телекоммуникационной задачи, обеспечивающей связь между элементами системы, расположенными на определенном расстоянии друг от друга (как блоки 1 и 2 в предлагаемом техническом решении), фирма "Астрасофт" предлагает коммуникационный пакет "Астра плюс", многоканальные сети приема/передачи информации, в том числе и радиоканальные сети (см. например, там же). Пакет "Астрасфот" позволяет использовать простой и эффективный интерфейс взаимодействия между задачами прикладного уровня и телекоммуникационной системой. Пакет "Астра-плюс" поддерживает широкий спектр связанного оборудования (модемов и пр.), прост в эксплуатации, не требует специально подготовленных кадров для обслуживания. Надежность пакета проверена реальной эксплуатацией (см. там же). В процессе передачи информации положение радиолуча, сформированного антенной 10, относительно приемного устройства 11 остается стабилизированным (с помощью автоматической следящей системы), то есть надежность передачи поддерживается постоянно высокой. При необходимости части принятой информации заносится в запоминающее устройство 17.
В случае, если передача ведется между подвижными (одним или обоими) объектами (приемным и передающим пунктами), оператор периодически уточняет дальность (путем периодического нажатия на кнопку измерения дальности на дальномере 5) между пунктами 1 и 2, а приводы 9 и 15 вырабатывают и отрабатывают угловые поправки, соответствующие изменению дальности между приемным и передающим пунктами, в результате чего изменяется на соответствующую величину и угловое положение антенны 10 и оптического приемника 20, то есть ось радиолуча антенны 10 остается совмещенной с приемным устройством 11, а оптическая ось оптического приемника 20 остается совмещенной с источником светового излучения 21. Чем быстрее меняется дальность между пунктами 1 и 2, тем чаще оператор 13 должен ее уточнять (то есть измерять).
В процессе всей передачи оператор 13 периодически контролирует степень совмещения антенны 10 с приемным устройством 11 с помощью индикатора захвата 28 и визирного устройства 14.
По окончании передачи информации оператор 13 включает источник информации 3 и передатчик 8. Тем самым прекращается связь по радиоканалу антенн 10 с приемным устройством 11, снимается сигнал с выхода датчика поступления информации 16, в результате чего блок включения 22 отключает источник светового излучения 21, а автоматическая система слежения перестает выполнять функцию слежения (из-за отсутствия светового сигнала). Управляемый коммутатор 27 отключает блок 26 от блока 24 (из-за снятия сигнала с входа блока захвата 29). В поле зрения визирного устройства 14 исчезает световой сигнал с выхода индикатора захвата 28. Оператор переводит переключатель 23 в первое положение и в дальнейшем управляет визирным устройством 14 вручную с помощью привода наведения 19. В случае окончательного выключения системы выключают и блоки 4, 5, 9, 15, 18-20, 24.
Таким образом, исполнение радиоантенны узконаправленной, введение в систему передачи информации средств измерения дальности, оптического приемника, источника и приемника информации, датчика поступления информации, запоминающего устройства, автоматической следящей системы и др. а также новых связей позволяет повысить помехозащищенность, скрытность и надежность передачи информации. При этом помехозащищенность и скрытность повышаются в несколько раз, поскольку область распространения радиоизлучения сужается в десятки раз. Надежность же устойчивой радиосвязи не только не уменьшается (из-за сужения диаграммы направленности радиоантенны), а увеличивается за счет ввода автоматической следящей системы. Кроме того, ввод автоматической следящей системы позволяет существенно улучшить эргономические условия деятельности оператора.
Возможность изготовления предложенной системы не вызывает сомнений, так как введенные элементы изготавливаются серийно и находят широкое применение как на подвижных объектах военной техники, так и в промышленности.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ВООРУЖЕНИЯ ТАНКА | 1995 |
|
RU2087830C1 |
| КОМПЛЕКС ВООРУЖЕНИЯ | 2007 |
|
RU2345312C1 |
| УСТРОЙСТВО ДЛЯ ПРИЦЕЛИВАНИЯ | 1994 |
|
RU2072497C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2504814C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2496081C1 |
| УСТРОЙСТВО ДЛЯ ВИЗИРОВАНИЯ | 2005 |
|
RU2287760C1 |
| ТРЕНАЖЕР ОПЕРАТОРОВ ПУШЕЧНО-РАКЕТНОГО ВООРУЖЕНИЯ | 2011 |
|
RU2465534C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ И ОПОЗНАВАНИЯ | 1996 |
|
RU2115955C1 |
| СИСТЕМА ПЕРЕДАЧИ ИНФОРМАЦИИ | 1994 |
|
RU2090004C1 |
| Автоматизированный аппаратурный комплекс спутниковой открытой оптической связи | 2015 |
|
RU2608060C2 |
Изобретение относится к средним управлениям, а более конкретно - к системам передачи информации. Предложенное устройство содержит установленные на передающем пункте пульт управления оператора, визирное устройство и соединенный с ним кинематически привод наведения, последовательно соединенные передатчик и антенну, а также установленные на приемном пункте последовательно соединенные приемное устройство, сопряженное с антенной передающего пункта, демодулятор и исполнительные органы. Предложенная система передачи информации отличается от известной тем, что в нее введены установленные на передающем пункте индикатор захвата, привод антенны, кинематически связанный с антенной, источник информации, выход которого соединен со входом передатчика, последовательно соединенные дальномер, блок дальности, привод оптического приемника, оптический приемник, координатор, блок захвата, управляемый коммутатор, второй вход которого соединен со вторым выходом координатора, масштабирующий блок, согласующее устройство и переключатель, второй вход которого соединен с выходом пульта управления оператора, а выход - со входом привода наведения, установленные на приемном пункте последовательно соединенные приемник информации, вход которого соединен со вторым выходом демодулятора, и запоминающее устройство, а также последовательно соединенные датчик поступления информации, вход которого соединен со вторым выходом приемного устройства, блок включения и источник светового излучения, второй вход которого кинематически соединен с приемным устройством, а выход оптически сопряжен с оптическим приемником светового излучения, при этом первый вход привода антенны электрически соединен с выходом блока дальности, а сама антенна выполнена узконаправленной, визирное устройство кинематически соединено с приводами антенны и оптического приемника светового излучения, а его второй вход соединен через индикатор захвата со вторым выходом блока захвата. 1 ил.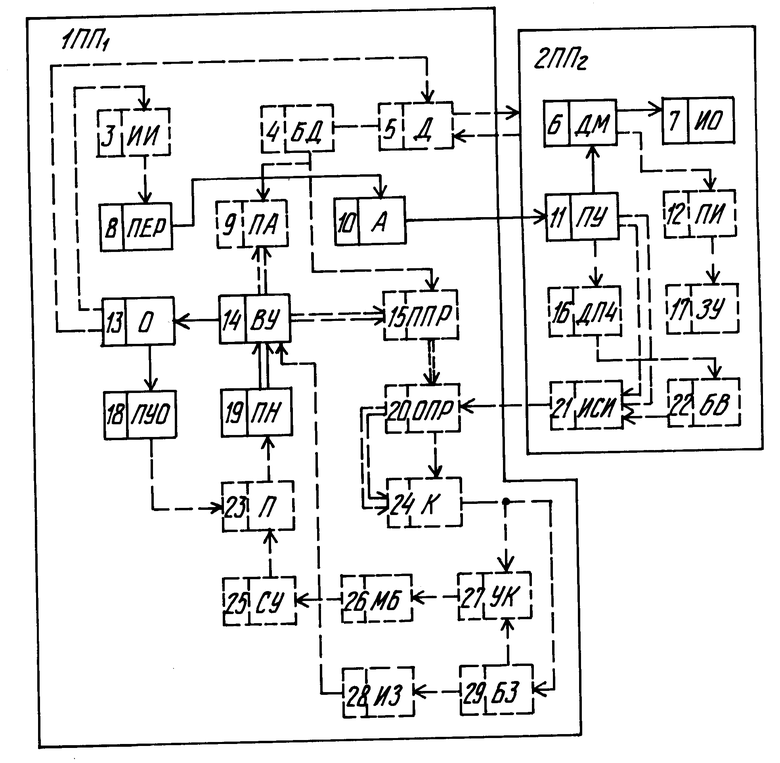
Система передачи информации, содержащая установленные на передающем пункте пульт управления оператора, визирное устройство и соединенный с ним кинематически привод наведения, последовательное соединенные передатчик и антенну, а также установленные на приемном пункте последовательно соединенные приемное устройство, сопряженное с антенной передающего пункта, демодулятор и исполнительные органы, отличающаяся тем, что в нее введены установленные на передающем пункте индикатор захвата, привод антенны, кинематически связанный с антенной, дополнительный источник информации, выход которого соединен с входом передатчика, последовательно соединенные дальномер, блок дальности, привод оптического приемника, оптический приемник, координатомер, блок захвата, управляемый коммутатор, второй вход которого соединен с вторым выходом координатомера, масштабирующий блок, согласующее устройство и переключатель, второй вход которого соединен с выходом пульта управления оператора, а выход с входом привода наведения, установленные на приемном пункте последовательно соединенные дополнительный приемник информации, вход которого соединен с вторым выходом демодулятора, и запоминающее устройство, а также последовательно соединенные блок выделения управляющего сигнала, вход которого соединен с вторым выходом приемного устройства, блок включения и источник светового излучения, второй вход которого кинематически соединен с приемным устройством, а выход оптически сопряжен с оптическим приемником светового излучения, при этом первый вход привода антенны электрически соединен с выходом блока дальности, а сама антенна выполнена узконаправленной, визирное устройство кинематически соединено с приводом антенны и оптического приемника светового излучения, а его второй вход соединен через индикатор захвата с вторым выходом блока захвата.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Латухин А.Н | |||
| Противотанковое вооружение | |||
| - М.: Воениздат, 1974, с.192 - 236 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Техническое описание и инструкция по эксплуатации | |||
| Капельная масленка с постоянным уровнем масла | 0 |
|
SU80A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
