Изобретение относится к электротехнике, в частности к системам управления бесколлекторных двигателей постоянного тока (вентильных двигателей).
Известна аналоговая система управления вентильным двигателем, содержащая аналоговый датчик положения ротора, источник опорных напряжений, модулятор, демодулятор, фазочувствительный выпрямитель, усилитель мощности, преобразователь частоты в напряжении /1/.
Недостатки этой системы состоят в том, что в выходном напряжении инвертора вентильного двигателя образуются субгармоники и постоянная составляющая, а также имеет место несимметрия основных гармоник, что обусловлено различием фазовых углов в выходом напряжения аналогового датчика положения ротора, а также погрешностей демодулятора и, кроме того, недостатком является низкая точность оптимизации регулирующих параметров, определяющая величину КПД вентильного двигателя.
Известна цифровая система управления двигателем, содержащая микроЭВМ с микропроцессором, цифровые датчики положения, тока и напряжения, система также содержит аналого-цифровой преобразователь, цифровой регулятор компенсации возмещения /2/.
Известная цифровая система управления двигателем имеет следующие недостатки: отсутствует возможность сокращения числа фаз в стационарном режиме с трех до одной в цифровой датчик положения; система не допускает возможности рационально производить выбор для замкнутого контура регулирующего параметра амплитуды или фазы выходного напряжения инвертора вентильного двигателя для обеспечения максимального его КПД во всех режимах работы.
Техническим результатом, на достижение которого направлено изобретение, является возможность исключить в стационарных режимах субгармоники, постоянную составляющую и несимметрию основных гармоник трех фаз напряжения инвертора вентильного двигателя, в результате чего значительно уменьшаются пульсации момента вращения вентильного двигателя, а следовательно, и его виброактивность, что особенно важно в случае применения его в автономных объектах, а также улучшаются его энергетические характеристики, повышается КПД вентильного двигателя. Кроме того, возможно повысить КПД вентильного двигателя за счет осуществления оптимизации регулирующих параметров (амплитуды основной гармоники напряжения инвертора и электрического угла между напряжением инвертора и ЭДС вентильного двигателя).
Технический результат достигается за счет того, что цифровая система управления вентильным двигателем, содержащая микроЭВМ с микропроцессором, цифровые датчики положения, тока и напряжения, снабжена цифровым измерителем периода, однофазным регулятором фазы, многофазным регуляторов амплитуды, тремя постоянными запоминающими устройствами и логическим инвертором, при этом микроЭВМ выполнена с возможностью реализации разработанных алгоритмов для обеспечения технического результата.
На фиг.1 показана схема цифровой системы управления вентильным двигателем; на фиг. 2 алгоритм вычисления при трогании вентильного двигателя; на фиг.3 временные диаграммы при пуске (трогание); на фиг.4,5,6 алгоритм вычислений при разгоне вентильного двигателя; на фиг.7а,б временные диаграммы, иллюстрирующие работу цифрового измерителя периода и временные диаграммы напряжений (кодов) при разгоне; на фиг. 8 алгоритм вычислений в стационарном режиме вентильного двигателя; на фиг.9 и 10 алгоритм вычислений при рекуперативном торможении вентильного двигателя.
Цифровая система управления вентильным двигателем содержит (фиг.1) цифровой датчик 1 положения (ЦДП), включающий датчик 2 положения ротора (ДПР) и цифровой компаратор 3 (КЦ), цифровой датчик 4 тока (ЦДТ), включающий датчик 5 тока (ДТ), выполненный в виде шунта, и аналого-цифровой преобразователь 6 (АЦП), цифровой датчик 7 напряжения (ЦДН), включающий датчик 8 напряжения (ДН), и аналого-цифровой преобразователь 9 (АЦП), цифровой измеритель 10 периода (УИП), выполненный на программируемом таймере, однофазный регулятор 11 фазы (ОРФ), многофазный регулятор 12 амплитуды (МРА), также выполненный на программируемом таймере, постоянные запоминающие устройства 13, 14 и 15 (ПЗУ), микроЭВМ 16 с микропроцессором (МП), логический инвертор 17 (ЛИ).
МикроЭВМ 16 соединена с постоянными запоминающими устройствами 13, 14 и 15. Вход 4 микроЭВМ 16 соединен с цифровым датчиком 1 положения, а вход-выход 5/1 с выходом и входом 4 цифрового измерителя 10 периода; выход 4 микроЭВМ 16 соединен с выходом 1 однофазного регулятора 11 фазы, вход 2 которого соединен с выходом цифрового датчика 1 положения, а выход однофазного регулятора 11 фазы соединен с входом 6 микроЭВМ 16, выход 5 которой соединен с входом многофазного регулятора 12 амплитуды, один из выходов которого соединен с входом логического инвертора 17, а к другому выходу подключен вход 1 управления полупроводниками приборами инвертора 18, соединенного через фильтр 19 с вентильным двигателем 20, силовые цепи которых соединены с минусом источника постоянного тока (не показан), к выходу логического инвертора 17 подключается вход 2 управления полупроводниковыми приборами инвертора 18, силовые цепи которых соединен с плюсом источника постоянного тока, вход-выход 6/1 микроЭВМ 16 соединен с входом-выходом 1/6 цифрового датчика 4 тока, ее вход-выход 7/1 с входом-выходом 1/7 цифрового датчика 7 напряжения, а ее входы 8, 9 и 10 соответственно с выходами постоянных запоминающих устройств 13, 14 и 15, входы которых соединены с выходами 1, 2 и 3 микроЭВМ 16, к входам 1, 2 и 3 которой подключается пульт оператора (не показан), вход цифрового датчика 4 тока и один из выходов 1 цифрового датчика 7 напряжения соединены, к входу 1 цифрового датчика 4 тока и другому входу 2 цифрового датчика 7 напряжения подсоединяются входы источника постоянного тока питания инвертора 18.
Цифровой измеритель 10 периода выполнен на программируемом таймере, работающем в режиме 0. Однофазной регулятор 11 фазы также выполнен на программируемом таймере [3] работающем в режиме 1. Многофазный регулятор 12 амплитуды работает в режиме 0. Логический инвертор 17 выполнен согласно [4] постоянные запоминающие устройства 13, 4 и 15 -[5] а микроЭВМ 16 -[6] При этом постоянное запоминающее устройство 13 содержит программу команд управления, а постоянные запоминающие устройства 14 и 15 данные параметров, в которых имеются поля адресов и данных оптимальных значений амплитуд первых гармоник выходных напряжений инвертора и их оптимальных фазовых углов относительно ЭДС вентильного двигателя 20 при разных значения периода напряжения инвертора и момента сопротивления нагрузки вентильного двигателя 20. В эти же постоянные запоминающие устройства 14 и 15 записываются предельные (максимальные значения) ординат моделирующих функций импульсов управления транзисторами инвертора 18 для каждого из периодов Tш широтно-импульсной модуляции, составляющих период T напряжения инвертора 18, в них же вносятся необходимые данные для осуществления связанной когерентной системы: моделирующая функция коммутирующее напряжение широтно-импульсного модулятора. Кроме того, в постоянные запоминающие устройства 14 и 15 вносятся значения коэффициентов функции ПИД регулирования; произвольных вращающих моментов по амплитуде первой гармоники выходного напряжения инвертора 18 или по углу сдвига фаз напряжения инвертора 18 и ЭДС вентильного двигателя 20; значения управляющих (предельных) напряжений транзисторами инвертора 18 для разных положений ротора вентильного двигателя 20 при трогании, характеризующихся соответствующими для каждой фазы кодами цифрового датчика 1 положения ротора вентильного двигателя 20. Предельные значения соответствуют максимуму амплитуды 1-й гармоники напряжения инвертора 20.
Цифровая система управления вентильным двигателем 20 работает следующим образом.
Рассмотрим процесс пуска вентильного двигателя 20 с исполнительным механизмом 21. Многофазный регулятор 12 амплитуды согласно действию программируемого таймера в режиме 0 имеет низкий уровень выходных сигналов в трех каналах, так как отсчет не производится (в его счетчики не заложены числа). Следовательно, транзисторы 22 (T2, T4, T6) инвертора18, управляемые непосредственно от многофазного регулятора 12 амплитуды, закрыты, инвертор 18 обесточен и напряжение на вентильный двигатель 20 не подается. Процесс управления начинается с измерения половины периода T напряжения инвертора 18, которому пропорционален период вращения вентильного двигателя 20. Сигнал с цифрового датчика 1 положения в виде цифрового одноразрядного кода поступает на цифровой измеритель 10 периода и на однофазный регулятор 11 фазы. Одновременно с трех выходов (фазы A, B, C) цифрового датчика 1 положения сигналы, представляющие трехразрядный код, подаются на входы микроЭВМ 16. Так как вентильный двигатель 20 неподвижен, период T ∞ то есть больше его предельного значения (Tпр), которое может измерить цифровой измеритель 10 периода. На основании этого цифровая система управления определяет, что вентильный двигатель 20 находится на первом этапе пуска этапе трогания, алгоритм которого приведен на фиг.2. По трехразрядному коду на входах микроЭВМ 16 и записанной таблице в постоянное запоминающее устройство 14 микропроцессор микроЭВМ 16 находят напряжения управления трех фаз (относительные величины), в дальнейшем необходимые для расчета. Управляемыми непосредственно от многофазного регулятора 12 амплитуды выбраны транзисторы 22, поскольку напряжения на его выходах имеет низкий уровень (0) в начале каждого периода Tш и до окончания отсчета, после чего появляется высокий уровень. Учитывая, что в транзисторах 23 (T1, T3, T5) каждый период Tш должен начинаться с открытого состояния их для обеспечения положительной полуволны фазной ЭДС инвертора 18 (фазы A), эти транзисторы 23 могут управляться от многофазного регулятора 12 амплитуды только через логические инверторы 17. Необходимо отметить, что при трогании фазовый сдвиг между ЭДС инвертора 18 и составляющей ее, компенсирующей ЭДС вентильного двигателя 20, составляет T/4, поскольку такой фазовый сдвиг установлен между датчиком 2 положения ротора и ЭДС вентильного двигателя 20. Это существенно снижает его вращающий момент. Для того, чтобы его увеличить при трогании, нужно уменьшить указанный фазовый сдвиг до T/12 посредством соответствующего изменения фазового сдвига предельного напряжения управления транзисторами 22, 23 инвертора 18 относительно напряжения датчика 2 положения ротора. Указанная поправка учтена при составлении таблицы постоянного запоминающего устройства 14. Далее в цифровой системе будут выполняться следующие операции. По команде из постоянного запоминающего устройства 13 цифровой датчик 4 тока измеряет ток 1 потребления инвертора 18.При этом ток первого цикла измерений и вычислений близок или равен нулю. После считывания показаний цифрового датчика 4 тока микропроцессор микроЭВМ 16 вычисляет относительную величину отклонения тока 1x от опорного значения 1оп. Очевидно в первом цикле работы величина 1x равна единице. Процессор по командам из постоянного запоминающего устройства 13 определяет относительную величину отклонения амплитуды первой гармоники выходного напряжения инвертора 18 (напряжения вентильного двигателя 20) от установившегося значения, соответствующего 1оп из формулы ΔU ) из формулы на фиг.2, в которой Kd отношение минимального в эксплуатации значения напряжения постоянного тока (Ud) к текущему (любое между минимальным и максимальным) значению его. Для первого цикла вычислений, как уже указывалось, (
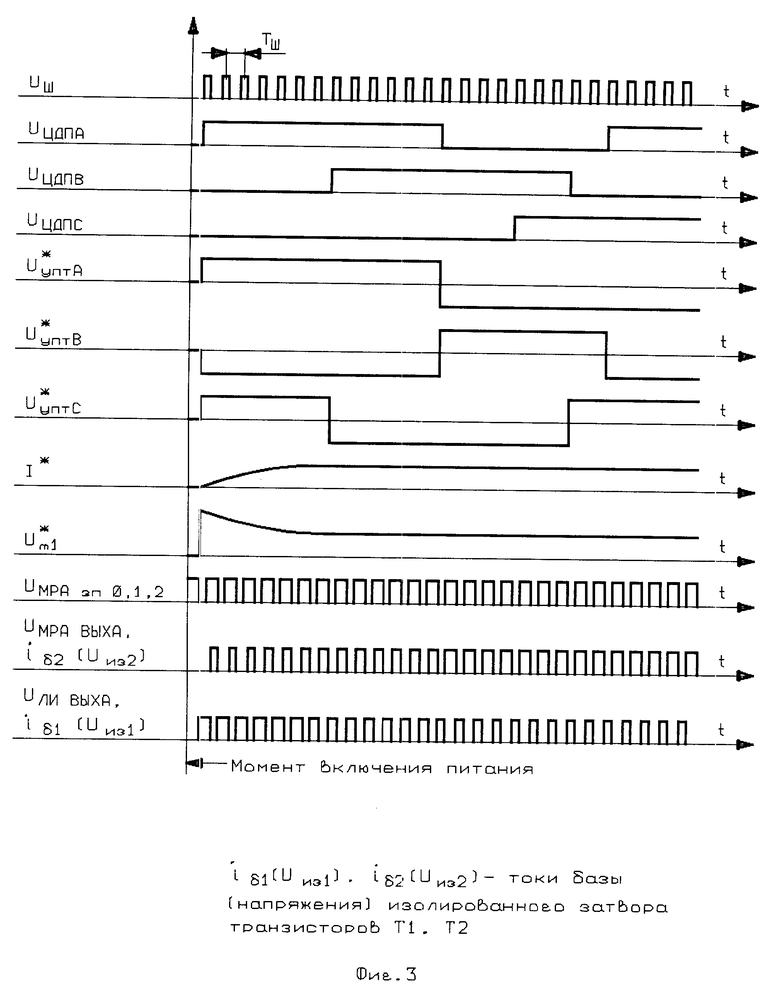
) из формулы на фиг.2, в которой Kd отношение минимального в эксплуатации значения напряжения постоянного тока (Ud) к текущему (любое между минимальным и максимальным) значению его. Для первого цикла вычислений, как уже указывалось, (  ). На этом заканчивается первый цикл вычислений микропроцессора микроЭВМ 16 и начинается второй цикл. После окончания первого цикла одновременно с первым генерируемым в цифровой системе импульсом Uш с периодом Tш в момент прохождения переднего фронта его по команде из постоянного запоминающего устройства 13 "Запись" (сигнал UМРАЗП0 ,1,2на входе на фиг.3) заносятся в счетчике его каналов три разных числа, соответствующие разным значениям
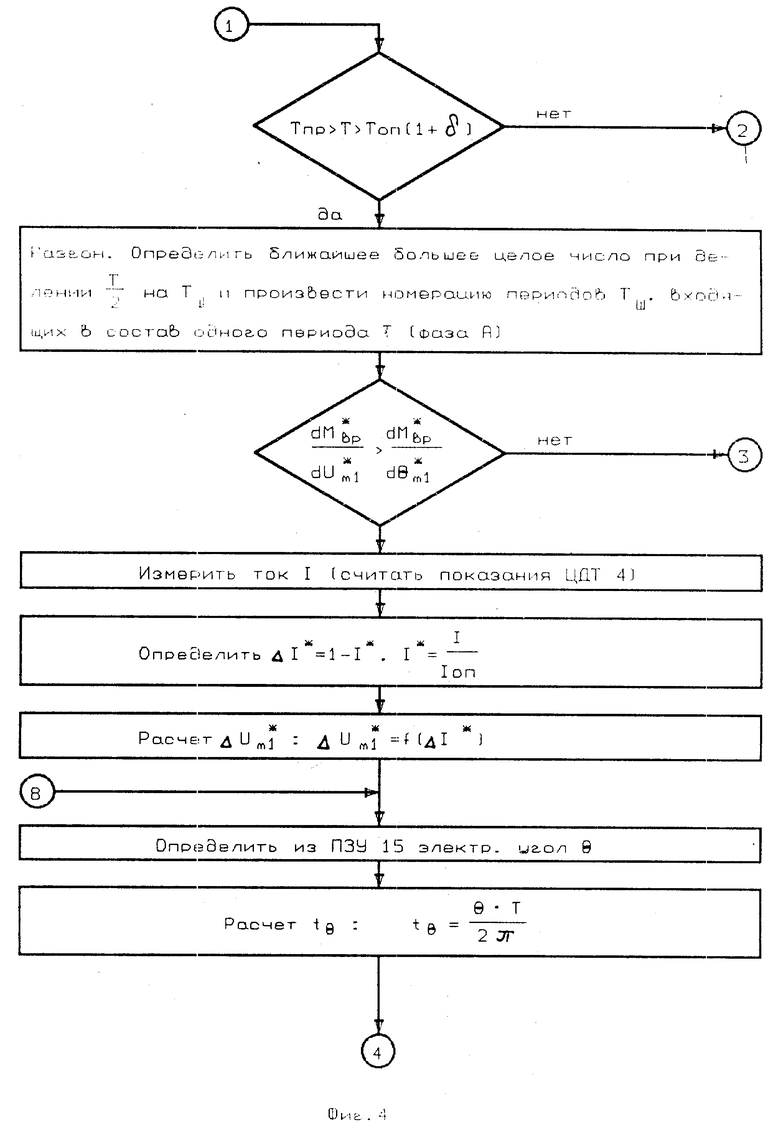
). На этом заканчивается первый цикл вычислений микропроцессора микроЭВМ 16 и начинается второй цикл. После окончания первого цикла одновременно с первым генерируемым в цифровой системе импульсом Uш с периодом Tш в момент прохождения переднего фронта его по команде из постоянного запоминающего устройства 13 "Запись" (сигнал UМРАЗП0 ,1,2на входе на фиг.3) заносятся в счетчике его каналов три разных числа, соответствующие разным значениям  С засылкой этих чисел одновременно начинается их отсчет в трех каналах многофазного регулятора 12 амплитуды, функции которого выполняет, как уже указывалось, программируемый интервальный таймер, работающий в режиме "0" с постоянным сигналом высокого уровня на входах разрешения отсчета P0, P1, O2. Согласно изложенному до и во время отсчета на выходах трех каналов Вых0, Вых1, Вых2 многофазного регулятора 12 амплитуды не будет сигналов. Когда же отсчет указанных чисел закончится, а это произойдет в разное время, поскольку числа неодинаковые, на выходах многофазного регулятора 12 амплитуды будут появляться сигналы UМРАвыхA, UМРАвыхB, UМРАвыхC, открывающие транзисторы 22, а на выходах логических инверторов 17, на входе которых также поданы выходные сигналы многофазного регулятора 12 амплитуды, будут получены сигналы UливыхA, UливыхB, UливыхCнаходящиеся в противофвзе с сигналами на выходе многофазного регулятора 12 амплитуды и закрывающие в разное время транзистора 23. Теперь одновременно будет открыты три транзистора 22 инвертора 18, на выходе инвертора 18 появится напряжение, ротор вентильного двигателя 20 начнет поворачиваться. После прохождения заднего фронта Uш начнется второй цикл измерений и вычислений по тому же алгоритму, приведенному на фиг.2. Работа по указанному алгоритму продолжается до тех пор, пока T>Tпр. Когда измеренный период окажется в пределах Tпр > T > Tоп(1 + δ) где δ заданная величина, тогда наступит второй этап пуска разгон, характеризуемый существенным изменением частоты вращения вентильного двигателя 20 и осуществляемый по алгоритму, приведенному на фиг.4, который в существенной мере унифицирован с алгоритмом (фиг.8) на этапе стабилизации частоты вращения.
С засылкой этих чисел одновременно начинается их отсчет в трех каналах многофазного регулятора 12 амплитуды, функции которого выполняет, как уже указывалось, программируемый интервальный таймер, работающий в режиме "0" с постоянным сигналом высокого уровня на входах разрешения отсчета P0, P1, O2. Согласно изложенному до и во время отсчета на выходах трех каналов Вых0, Вых1, Вых2 многофазного регулятора 12 амплитуды не будет сигналов. Когда же отсчет указанных чисел закончится, а это произойдет в разное время, поскольку числа неодинаковые, на выходах многофазного регулятора 12 амплитуды будут появляться сигналы UМРАвыхA, UМРАвыхB, UМРАвыхC, открывающие транзисторы 22, а на выходах логических инверторов 17, на входе которых также поданы выходные сигналы многофазного регулятора 12 амплитуды, будут получены сигналы UливыхA, UливыхB, UливыхCнаходящиеся в противофвзе с сигналами на выходе многофазного регулятора 12 амплитуды и закрывающие в разное время транзистора 23. Теперь одновременно будет открыты три транзистора 22 инвертора 18, на выходе инвертора 18 появится напряжение, ротор вентильного двигателя 20 начнет поворачиваться. После прохождения заднего фронта Uш начнется второй цикл измерений и вычислений по тому же алгоритму, приведенному на фиг.2. Работа по указанному алгоритму продолжается до тех пор, пока T>Tпр. Когда измеренный период окажется в пределах Tпр > T > Tоп(1 + δ) где δ заданная величина, тогда наступит второй этап пуска разгон, характеризуемый существенным изменением частоты вращения вентильного двигателя 20 и осуществляемый по алгоритму, приведенному на фиг.4, который в существенной мере унифицирован с алгоритмом (фиг.8) на этапе стабилизации частоты вращения.
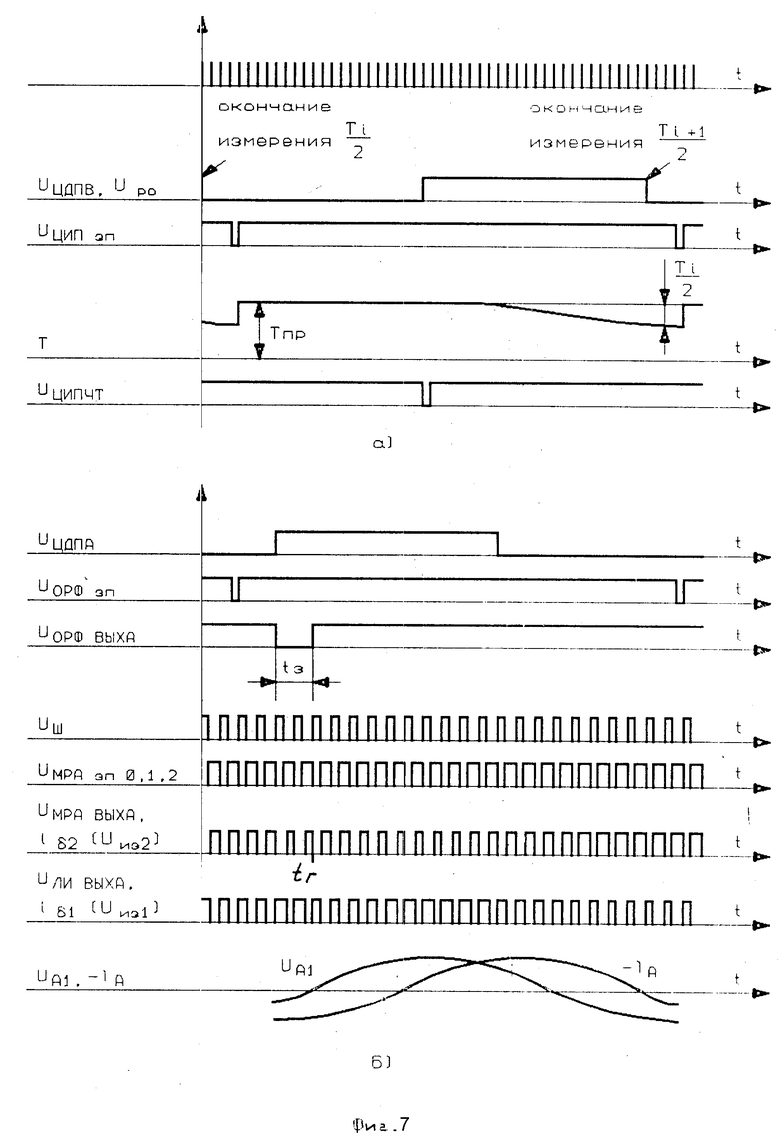
Как уже указывалось, измерение полупериода T/2 производится цифровым измерителем 10 периода, функции которого выполняет один канал программируемого интервального таймера, также работающий в режиме "0". На вход P0 (разрешение отсчета) этого канала в течение измеряемой полуволны каждого T подается от цифрового датчика 1 положения (фаза B) напряжение высокого уровня UЦДПВ. По предварительно поданной на выход цифрового измерителя 10 периода команде "Запись" (сигнал UЦИПЗП на фиг. 7а) производятся сначала загрузка (первый машинный цикл), а затем перезагрузка (последующие циклы) числа, соответствующего Tпр и равного ближайшему меньшему целому числу периодов Tти тактовых импульсов, помещающихся в Tпр/2, и далее по команде таймеру "Чтение" (сигнал UЦИПЧТ) считывание микроЭВМ 16 этого декрементируемого числа. Далее микропроцессор микроЭВМ 16 согласно программе постоянного запоминающего устройства 13 вычисляет T. Временные диаграммы указанных сигналов при работе цифрового измерителя 10 периода приведены также на фиг. 7а. Период от управления транзисторами 22, 23 по алгоритму на фиг. 2, которое продолжается (см. tг на фиг. 7б) и при разгоне, к управлению по алгоритму на фиг. 4 произойдет после выполнения предусмотренных этих алгоритмом следующих операций. Цифровой системой по известным заданным оператором периоду T, моменту сопротивления Mс и данным, записанным в постоянное запоминающее устройство 15, определяется выполнимость условия  Если оно выполняется, что имеет место при относительно большом T, то кроме вычислений отклонения регулируемой величины ΔIx и используемой в качестве регулирующего параметра в замкнутом контуре амплитуды U
Если оно выполняется, что имеет место при относительно большом T, то кроме вычислений отклонения регулируемой величины ΔIx и используемой в качестве регулирующего параметра в замкнутом контуре амплитуды U , сдвинутых по фазе на 120 эл.град. в течение периода Tпр через десятую долю, или единицу или десяток микросекунд. Далее рассчитываются по приведенным на фиг. 4 формулам относительные длительности закрытого состояния транзисторов 22
, сдвинутых по фазе на 120 эл.град. в течение периода Tпр через десятую долю, или единицу или десяток микросекунд. Далее рассчитываются по приведенным на фиг. 4 формулам относительные длительности закрытого состояния транзисторов 22  Очевидно эти величины для транзисторов 23 с объединенными эмиттерами, обозначаемые
Очевидно эти величины для транзисторов 23 с объединенными эмиттерами, обозначаемые  , представляет относительные длительности их открытого состояния. Следовательно справедливо равенство
, представляет относительные длительности их открытого состояния. Следовательно справедливо равенство  Управление для определения
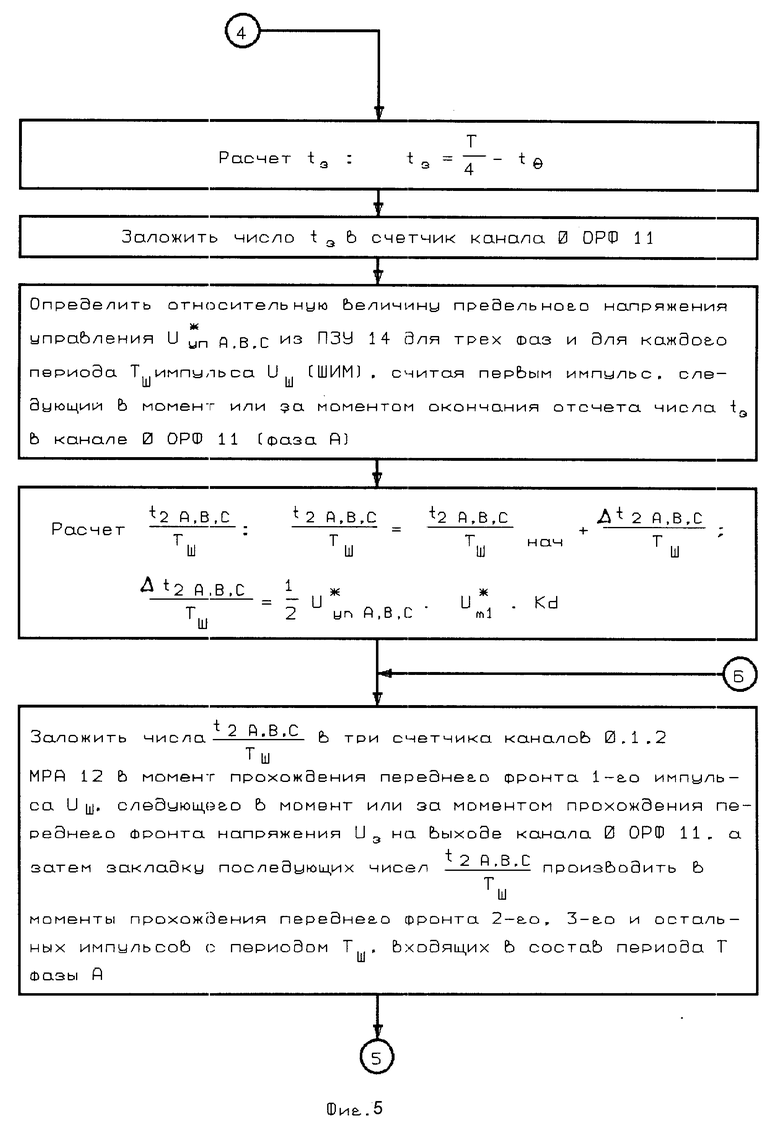
Управление для определения  приведено на фиг. 4. Когда завершится отсчет числа t3, заложенного в счетчик канала 0 фазы A однофазного регулятора 11 фазы (см. передний фронт сигнала UОРФвыхA на фиг. 7б), спустя некоторое время при прохождении переднего фронта первого сигнала широтно-импульсной модуляции (Uш) производится по команде "Запись" (сигнала UМРА вых A,B,C) закладка трех разных кодов
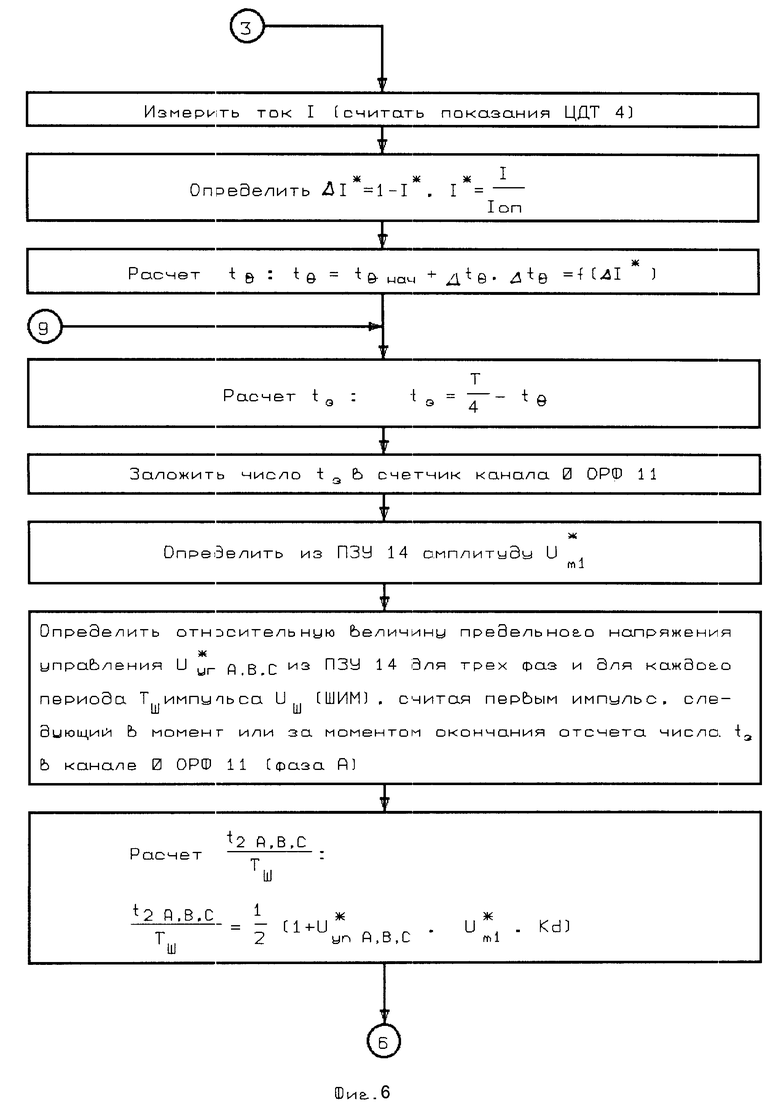
приведено на фиг. 4. Когда завершится отсчет числа t3, заложенного в счетчик канала 0 фазы A однофазного регулятора 11 фазы (см. передний фронт сигнала UОРФвыхA на фиг. 7б), спустя некоторое время при прохождении переднего фронта первого сигнала широтно-импульсной модуляции (Uш) производится по команде "Запись" (сигнала UМРА вых A,B,C) закладка трех разных кодов  в счетчике трех каналов многофазного регулятора 12 амплитуды и немедленно после этого начинается отсчет заложенных чисел. Тем самым осуществляется в момент tг первое управление от выходов UМРА вых A,B,C транзисторами 22 по алгоритму на фиг. 4. Одновременно от выходов логических инверторов 17 напряжениями Uли вых A,B,C осуществляется управление транзисторами 22. Непосредственно после закладки чисел в счетчике многофазного регулятора 12 амплитуды начинается второй цикл измерений и вычислений микропроцессора микроЭВМ 16 по алгоритму на фиг. 4 с предварительным выполнением операций по алгоритму на фиг. 2. На фиг. 7б показаны временные диаграммы сигналов цифрового датчика 1 положения, однофазного регулятора 11 фазы, многофазного регулятора 12 амплитуды, первой гармоники напряжения (UA1) инвертора 18 и его составляющей, компенсирующей ЭДС двигателя (-lA). В случае невыполнения неравенства производных на фиг. 4, что возможно при относительно большой частоте вращения вентильного двигателя 20 (малый T), в замкнутом контуре используется как регулирующий параметр электрический угол θ, к изменению которого более чувствительна система регулирования. Определение пропорционального углу q времени tθ производится микропроцессором микроЭВМ 16 с помощью также уравнения ПИД регулирования по относительной величине отклонения измеренного тока 1 от опорного значения согласно алгоритму на фиг. 4; микропроцессором микроЭВМ 16 также определяется время задержки t3 и код его закладывается в счетчик канала 0 однофазного регулятора 11 фазы (фаза A). Отсчет кода начинается по команде в момент прохождения переднего фронта сигнала цифрового датчика 1 положения (фаза A), поступающего на вход "Разрешение отсчета" (P0) однофазного регулятора 11 фазы. Затем по команде из постоянного запоминающего устройства 14 находится оптимальная амплитуда U
в счетчике трех каналов многофазного регулятора 12 амплитуды и немедленно после этого начинается отсчет заложенных чисел. Тем самым осуществляется в момент tг первое управление от выходов UМРА вых A,B,C транзисторами 22 по алгоритму на фиг. 4. Одновременно от выходов логических инверторов 17 напряжениями Uли вых A,B,C осуществляется управление транзисторами 22. Непосредственно после закладки чисел в счетчике многофазного регулятора 12 амплитуды начинается второй цикл измерений и вычислений микропроцессора микроЭВМ 16 по алгоритму на фиг. 4 с предварительным выполнением операций по алгоритму на фиг. 2. На фиг. 7б показаны временные диаграммы сигналов цифрового датчика 1 положения, однофазного регулятора 11 фазы, многофазного регулятора 12 амплитуды, первой гармоники напряжения (UA1) инвертора 18 и его составляющей, компенсирующей ЭДС двигателя (-lA). В случае невыполнения неравенства производных на фиг. 4, что возможно при относительно большой частоте вращения вентильного двигателя 20 (малый T), в замкнутом контуре используется как регулирующий параметр электрический угол θ, к изменению которого более чувствительна система регулирования. Определение пропорционального углу q времени tθ производится микропроцессором микроЭВМ 16 с помощью также уравнения ПИД регулирования по относительной величине отклонения измеренного тока 1 от опорного значения согласно алгоритму на фиг. 4; микропроцессором микроЭВМ 16 также определяется время задержки t3 и код его закладывается в счетчик канала 0 однофазного регулятора 11 фазы (фаза A). Отсчет кода начинается по команде в момент прохождения переднего фронта сигнала цифрового датчика 1 положения (фаза A), поступающего на вход "Разрешение отсчета" (P0) однофазного регулятора 11 фазы. Затем по команде из постоянного запоминающего устройства 14 находится оптимальная амплитуда U ). Далее микропроцессор микроЭВМ 16 вычисляет относительные длительности закрытого состояния транзисторов 22 (а значит открытого состояния транзисторов 23) по формулам на фиг. 4, полученным для случая, когда U
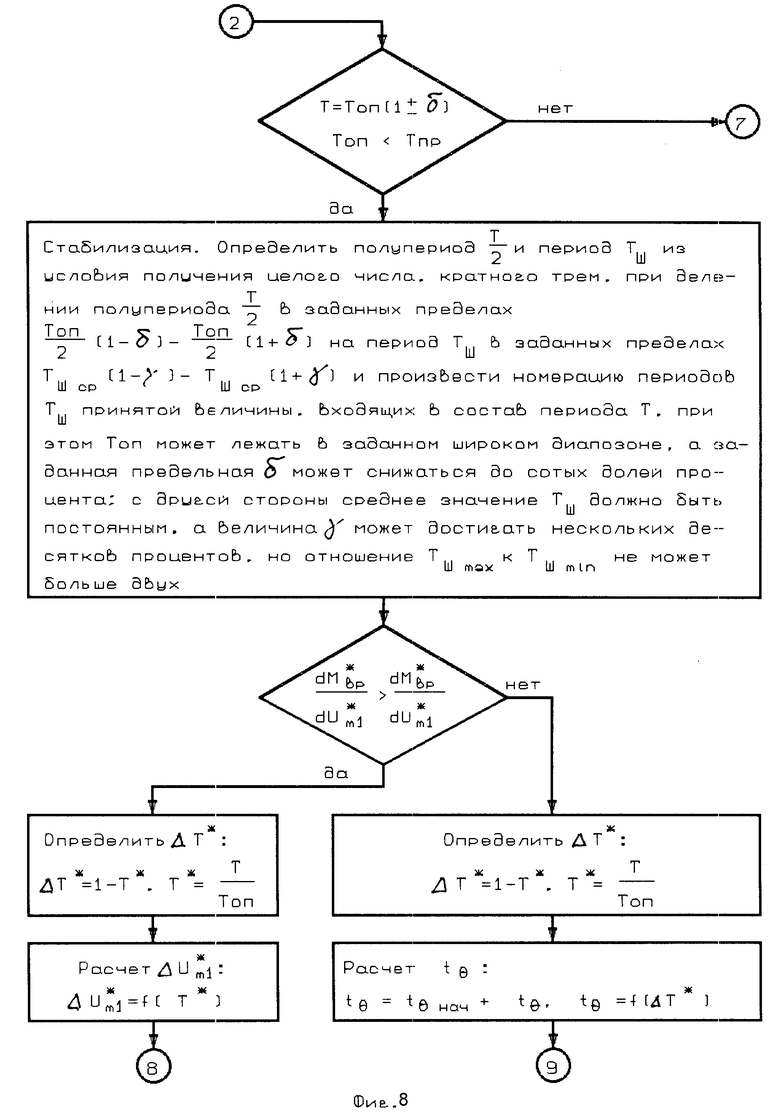
). Далее микропроцессор микроЭВМ 16 вычисляет относительные длительности закрытого состояния транзисторов 22 (а значит открытого состояния транзисторов 23) по формулам на фиг. 4, полученным для случая, когда U в счетчики каналов 0, 1, 2 многофазного регулятора 12 амплитуды и непосредственно после закладки начинается отсчет этих чисел, а микропроцессор микроЭВМ 16 начинает следующий цикл вычислений, а также измерений. После окончания отсчета на выходах указанных каналов образуются в разное время три напряжения высокого уровня разной длительности, которые обуславливают требуемые токи в базах транзисторов 22 и одновременно низкие (нулевые) уровни напряжений на выходах логического инвертора 17 и, следовательно, запирание в разное время транзисторов 23. Если при измерении уменьшающего периода T окажется, что он стал меньше Tоп(1+δ) где δ ≪ 1 это значит, что второй этап пуска разгон вентильного двигателя 20 завершен и начинается этап стабилизации его частоты вращения, который осуществляется в соответствии с алгоритмом, приведенным на фиг.8 (начало), а также алгоритмом на фиг.4 и 2 (продолжение и окончание). Для повышения качества энергии инвертора 18 предлагается обеспечить цифровой системой кратное трем отношение tоп/Tш постпредством введения корректировки заданного периода Tоп на малую величину δ, составляющую (в зависимости от требуемой точности и отношения Tоп/Tти, где Tти период тактовых импульсов) единицы или десятые, сотые доли процентов (от Tоп), а также периода Tш на значительно большую величину g (десятки процентов). Естественно, на этом этапе стабилизируемой величиной является период напряжения инвертора 18, как известно пропорциональный периоду вращения вентильного двигателя 20 (T=1/P-Tвр, где P число пар полюсов вентильного двигателя 20). Регулирующими параметрами остаются относительная амплитуда первой гармоники напряжения инвертора 18 и фаза его относительно фазы противоЭДС вентильного двигателя 20. Для замкнутого контура системы стабилизации автоматически из постоянного запоминающего устройства 14 или 15 выбирается тот регулирующий параметр, который обеспечивает большее относительное изменение вращающего момента, а второй оптимальный регулирующий параметр находится цифровой системой в постоянном запоминающем устройстве 15 или 14. Регулирующий параметр, принятый для замкнутого контура, определяется как функция отклонения стабилизируемой величины (T) от заданного значения в пределах Tоп(1±δ) с помощью известной функции ПИД регулирования ΔU
в счетчики каналов 0, 1, 2 многофазного регулятора 12 амплитуды и непосредственно после закладки начинается отсчет этих чисел, а микропроцессор микроЭВМ 16 начинает следующий цикл вычислений, а также измерений. После окончания отсчета на выходах указанных каналов образуются в разное время три напряжения высокого уровня разной длительности, которые обуславливают требуемые токи в базах транзисторов 22 и одновременно низкие (нулевые) уровни напряжений на выходах логического инвертора 17 и, следовательно, запирание в разное время транзисторов 23. Если при измерении уменьшающего периода T окажется, что он стал меньше Tоп(1+δ) где δ ≪ 1 это значит, что второй этап пуска разгон вентильного двигателя 20 завершен и начинается этап стабилизации его частоты вращения, который осуществляется в соответствии с алгоритмом, приведенным на фиг.8 (начало), а также алгоритмом на фиг.4 и 2 (продолжение и окончание). Для повышения качества энергии инвертора 18 предлагается обеспечить цифровой системой кратное трем отношение tоп/Tш постпредством введения корректировки заданного периода Tоп на малую величину δ, составляющую (в зависимости от требуемой точности и отношения Tоп/Tти, где Tти период тактовых импульсов) единицы или десятые, сотые доли процентов (от Tоп), а также периода Tш на значительно большую величину g (десятки процентов). Естественно, на этом этапе стабилизируемой величиной является период напряжения инвертора 18, как известно пропорциональный периоду вращения вентильного двигателя 20 (T=1/P-Tвр, где P число пар полюсов вентильного двигателя 20). Регулирующими параметрами остаются относительная амплитуда первой гармоники напряжения инвертора 18 и фаза его относительно фазы противоЭДС вентильного двигателя 20. Для замкнутого контура системы стабилизации автоматически из постоянного запоминающего устройства 14 или 15 выбирается тот регулирующий параметр, который обеспечивает большее относительное изменение вращающего момента, а второй оптимальный регулирующий параметр находится цифровой системой в постоянном запоминающем устройстве 15 или 14. Регулирующий параметр, принятый для замкнутого контура, определяется как функция отклонения стабилизируемой величины (T) от заданного значения в пределах Tоп(1±δ) с помощью известной функции ПИД регулирования ΔU
При снижении заданной частоты вращения вентильного двигателя 20 и соответствующим увеличением заданного периода Tоп(1-δ) по сравнению с измеряемой величиной его T осуществляет рекуперативное торможение вентильного двигателя 20 по алгоритму, приведенному на фиг.9. Этот процесс также имеет место в случае перегрузки на валу вентильного двигателя 20, следовательно, увеличения тока потребления инвертора 18. Для осуществления торможения переводятся вентильный двигатель 20 в генераторный режим, инвертор 18 в режим выпрямителя и в случае питания инвертора 18 не от сети постоянного тока, а от сети переменного тока через выпрямитель (не показан) последний переводится в режим инвертора 18, ведомого сетью. Поскольку в генераторном режиме ЭДС вентильного двигателя 20 опережает ее составляющую, компенсирующую напряжение инвертора 18, то цифровая система согласно программе принимает  где P число пар полюсов. По известной величине
где P число пар полюсов. По известной величине  при T Tнач (в начале торможения) и формуле в алгоритме на фиг. 5 микропроцессор микроЭВМ 16 вычисляет временной сдвиг фаз
при T Tнач (в начале торможения) и формуле в алгоритме на фиг. 5 микропроцессор микроЭВМ 16 вычисляет временной сдвиг фаз  а затем время задержки t3, которое при торможении превышает четверть периода T, вследствие отставание отставания первой гармоники выходного напряжения инвертора 18 от ЭДС вентильного двигателя 20. Считывается показание на выходе цифрового датчика 4 тока и вычисляется относительная величина разности измеренного и опорного значения тока вентильного двигателя 20. В связи с изменением направления тока 1 вентильного двигателя 20 в генераторном режиме, являющегося выходным током инвертора 18, работающего в выпрямительном режиме, следует принять отклонение 1 от 1оп равным ΔI′ = - ΔI = I - Iоп при этом I > Iоп. Дальнейшие операции вычисление U
а затем время задержки t3, которое при торможении превышает четверть периода T, вследствие отставание отставания первой гармоники выходного напряжения инвертора 18 от ЭДС вентильного двигателя 20. Считывается показание на выходе цифрового датчика 4 тока и вычисляется относительная величина разности измеренного и опорного значения тока вентильного двигателя 20. В связи с изменением направления тока 1 вентильного двигателя 20 в генераторном режиме, являющегося выходным током инвертора 18, работающего в выпрямительном режиме, следует принять отклонение 1 от 1оп равным ΔI′ = - ΔI = I - Iоп при этом I > Iоп. Дальнейшие операции вычисление U вычисление
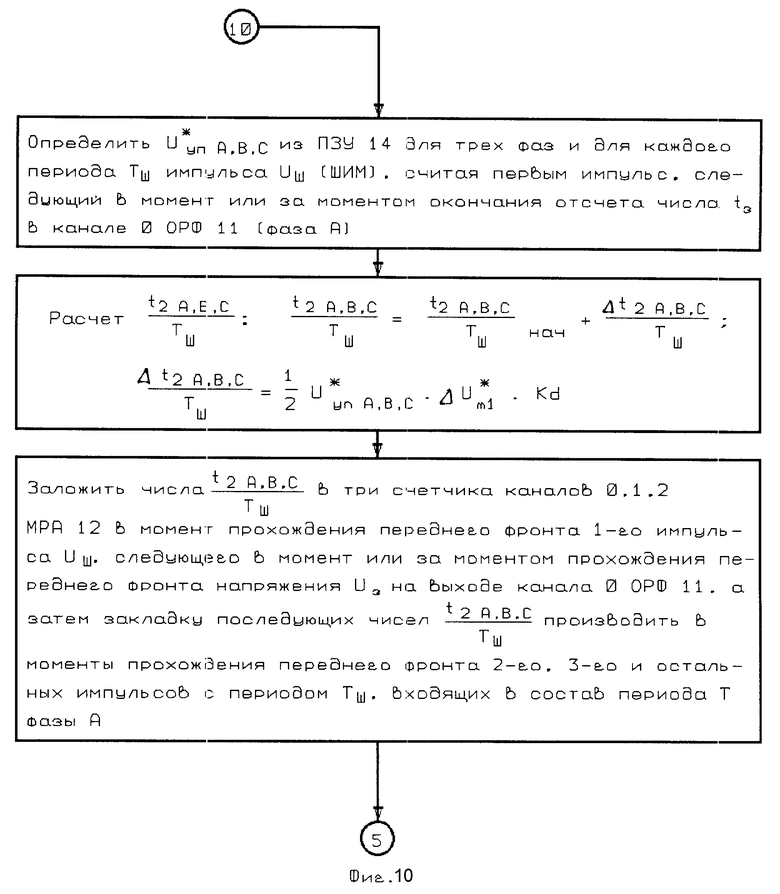
вычисление  и закладка в счетчики многофазного регулятора 12 амплитуды этих чисел производятся по формулам и указаниям, приведенным в алгоритме на фиг.9,10.
и закладка в счетчики многофазного регулятора 12 амплитуды этих чисел производятся по формулам и указаниям, приведенным в алгоритме на фиг.9,10.
Построение цифровой системы управления вентильным двигателем 20 с использованием в стационарном режиме одной фазы цифрового датчика 1 положения и связанной с ним одной фазы однофазного регулятора 11 фазы и использованием при этом трех фаз многофазного регулятора 12 амплитуды за счет применения таблиц постоянного запоминающего устройства 13, 14 и 15 с трехфазными предельными напряжениями управления позволяет исключить несимметрию напряжения управления инвертором 18 вентильного двигателя 20 и, следовательно, дает возможность исключить в стационарных режимах субгармоники, постоянную составляющую и несимметрию основных гармоник трех фаз напряжения инвертора 18, в результате чего значительно уменьшается пульсами момента вращения вентильного двигателя, а следовательно, и его виброактивность, что особенно важно в случае применения его в автономных объектах, а также улучшается его энергетические характеристики и повышается КПД вентильного двигателя 20. Повышение КПД вентильного двигателя 20 также достигается за счет введения в постоянные запоминающие устройства 14 и 15 оптимальных для всех режимов работы (разных T, Mс) регулирующих параметров (Um1, θ) и призводных момента вращения по указанным регулирующим параметрам, и введения в замкнутый контур цифровой системы управления того регулирующего параметра, к которому система более чувствительна (больше производная момента вращения), при этом другой регулирующий параметр определяется из постоянных запоминающих устройств 14 и 15 и используется для определения ширины импульсов управления инвертором 18 согласно разработанных алгоритмов. Наличие в цифровой системе управления логического инвертора 17 позволяет упростить многофазный регулятор 12 амплитуды и увеличить точность стабилизации частоты вращения, а введение цифрового измерителя 10 периода позволяет упростить систему.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЯЕМЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1994 |
|
RU2088039C1 |
| АНАЛОГО-ЦИФРОВОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 1994 |
|
RU2075828C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ | 1992 |
|
RU2068196C1 |
| СПОСОБ ПУСКА СИНХРОННЫХ МАШИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2096902C1 |
| ЦИФРОВОЙ РЕГУЛЯТОР ДЛЯ МНОГОДВИГАТЕЛЬНОГО ЭЛЕКТРОПРИВОДА | 1992 |
|
RU2071635C1 |
| ЭЛЕКТРОПРИВОД | 1994 |
|
RU2074505C1 |
| УПРАВЛЯЕМЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1994 |
|
RU2091978C1 |
| УПРАВЛЯЕМЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1994 |
|
RU2088041C1 |
| ВЫСОКОЧАСТОТНОЕ ЭЛЕКТРОХИРУРГИЧЕСКОЕ УСТРОЙСТВО | 1993 |
|
RU2069990C1 |
| УСТРОЙСТВО ДЛЯ МАКСИМАЛЬНОЙ ТОКОВОЙ ЗАЩИТЫ ЭЛЕКТРОУСТАНОВКИ ПЕРЕМЕННОГО ТОКА | 1999 |
|
RU2153750C1 |


Использование: в системах управления бесколлекторных двигателей постоянного тока. Сущность: цифровая система управляющий вентильным двигателем содержит цифровые датчики положения, тока и напряжения, цифровой измеритель периода однофазный регулятор фазы, многофазный регулятор амплитуды, три постоянных запоминающих устройства, логический инвертор, микроЭВМ с микропроцессором, при этом микроЭВМ выполнена с возможностью реализации разработанных алгоритмов. Это позволяет исключить несимметрию напряжения управления инвертором вентильного двигателя, исключив в стационарных режимах субгармоники и постоянную составляющую и тем самым уменьшают пульсации момента вращения вентильного двигателя. 10 ил.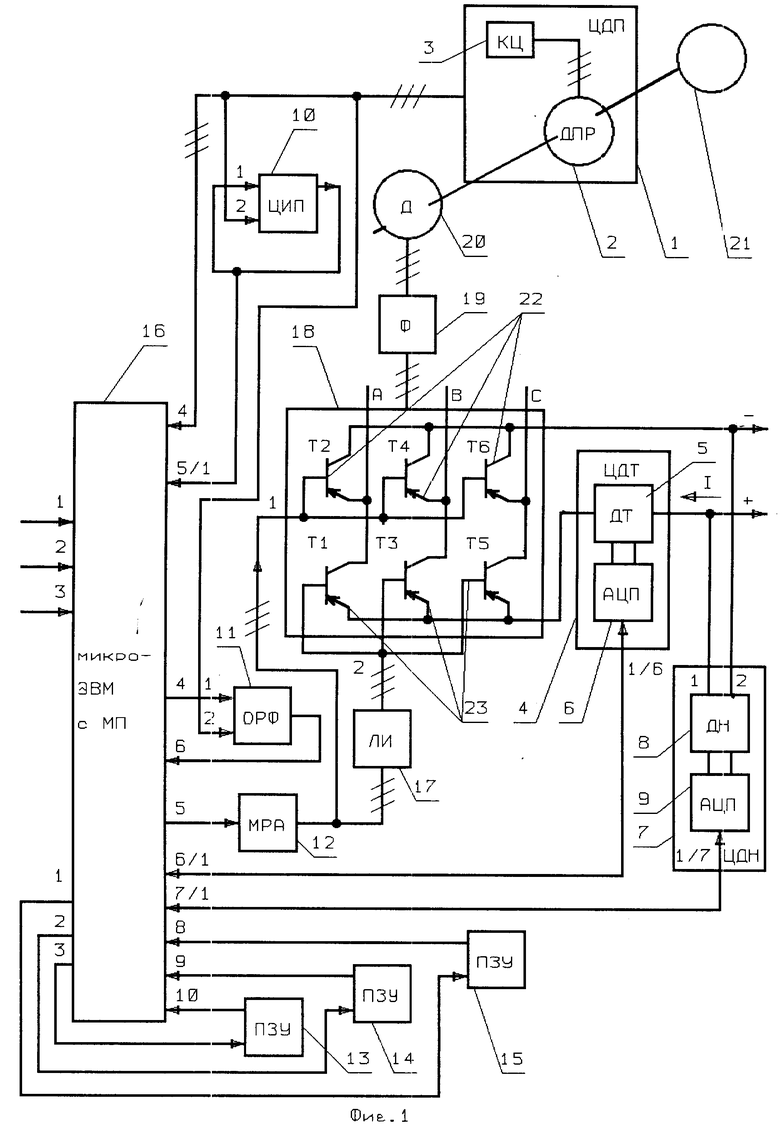
Цифровая система управления вентильным двигателем, содержащая микроЭВМ с микропроцессором, цифровые датчики тока, напряжения и положения, отличающаяся тем, что она снабжена цифровым измерителем периода, однофазным регулятором фазы, многофазным регулятором амплитуды, тремя постоянными запоминающими устройствами, логическим инвертором, одни входы микроЭВМ соединены с выходами постоянных запоминающих устройств, цифрового датчика положения, цифрового измерителя периода, однофазного регулятора фазы, два входа-выхода микроЭВМ с входами-выходами цифрового датчика тока и цифрового датчика напряжения, кроме того, три ее других входа служат для подключения пульта управления оператора, выходы микроЭВМ соединены с входами постоянных запоминающих устройств, однофазного регулятора фазы, многофазного регулятора амплитуды, входы цифрового измерителя периода и однофазного регулятора фазы соединены с выходами цифрового датчика положения, один выход многофазного регулятора амплитуды соединен с входом логического инвертора, а к другому выходу подключены одни входы управления полупроводниковыми приборами инвертора вентильного двигателя, силовые цепи которых соединены с "минусом" источника постоянного тока, к выходу логического инвертора подключены другие входы управления полупроводниковыми приборами инвертора, силовые цепи которых соединены через датчик тока с "плюсом" источника постоянного тока, один из входов цифрового датчика напряжения соединен с входом цифрового датчика тока, при этом к нему и другому входу цифрового датчика напряжения подключены входы питания инвертора, при этом микроЭВМ выполнена с возможностью реализации алгоритмов вычислений при трогании вентильного двигателя, при его разгоне, в стационарном режиме и при рекуперативном торможении, приведенных на фиг.2, 4, 6 и 7.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство, 1809504, кл.H 02K 29/14, 1993 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Башарин А.В | |||
| и др | |||
| Новые принципы построения цифровых систем управления на микропроцессорной основе | |||
| Электротехника | |||
| Прибор для охлаждения жидкостей в зимнее время | 1921 |
|
SU1994A1 |
