Предлагаемое изобретение относится к области приема цифровых сигналов, передаваемых методом относительной фазовой модуляции (ОФМ), и может быть использовано при построении аппаратуры передачи цифровой информации.
Известен способ демодуляции сигналов с относительной фазовой модуляцией [1] (способ-аналог), заключающийся в том, что формируют два квадратных (синфазный и квадратурный) опорных гармонических сигнала с частотой, равной средней частоте демодулируемого сигнала, вычисляют на длительности элемента сигнала пару его корреляционных функций с упомянутыми опорными сигналами, берут в момент окончания элемента сигнала отсчеты указанных корреляционных функций, получают оценку фазы демодулируемого сигнала путем вычисления функции arctg отношения этих отсчетов, сравнивая полученную оценку фазы с соответствующей оценкой фазы, полученной на предшествующем элементе сигнала, принимают решение по методу сравнения фаз о переданном информационном символе.
Известен демодулятор сигналов с относительной фазовой модуляцией [1] (устройство-аналог), состоящий из двух корреляторов, двух блоков стробирования, а также из блока вычисления функции arctg, решающего блока, генератора опорного колебания, фазовращателя, генератора тактовых импульсов; причем второй вход первого коррелятора вместе с входом фазовращателя подключен к выходу генератора опорного колебания, второй вход второго коррелятора соединен с выходом фазовращателя, входы установки корреляторов соединены вместе и подключены к первому выходу генератора тактовых импульсов; входы управления блоков стробирования соединяются с вторым выходом генератора тактовых импульсов; вход первого блока стробирования соединен с выходом первого коррелятора, а выход первого блока стробирования соединен с первым входом блока вычисления функции arctg, второй вход блока вычисления функции arctg соединен с выходом второго блока стробирования, вход которого подключен к выходу второго коррелятора, соединенные вместе первые входы первого и второго корреляторов служат входом демодулятора, выходом которого является выход решающего блока, вход которого подключен к выходу блока вычисления функции arctg.
Известный демодулятор ОФМ [1] работает следующим образом.
Приходящий по каналу связи демодулируемый сигнал S(t) поступает на первые входы первого и второго корреляторов; на вторые входы корреляторов подаются опорные сигналы квадратурные (синфазный Cos(2•π•fo•t) и квадратурный Sin(2•p•fo•t)) гармонические сигналы с частотой fo, равной средней частоте демодулируемого сигнала, формируемые на выходах генератора опорного колебания и фазовращателя соответственно.
В первом и втором корреляторах на длительности T элемента сигнала осуществляется вычисление двух корреляционных функций Y(t), X(t) этого сигнала S(t) и пары опорных сигналов Cos(2•p•fo•t), Sin(2•p•fo•t).


В момент окончания элемента сигнала, при t n•T, по управляющему сигналу с второго выхода генератора тактовых импульсов через блоки стробирования отсчеты Yn и Xn корреляционных функций подаются на первый и второй входы блока вычисления функции arctg соответственно. Управляющим сигналом с первого выхода генератора тактовых импульсов осуществляется сброс корреляторов, и начинается вычисление значений Y(t), X(t) корреляционных функций на следующем (n+1)-м элементе демодулируемого сигнала. Генератор тактовых импульсов строится таким образом, чтобы моменты появления его выходных сигналов соответствовали границам элементов демодулируемого сигнала.
Оценка фазы, полученная в блоке вычисления функции arctg, поступает в решающий блок, где по методу сравнения фаз принимается решение о принятом информационном символе, который поступает на выход демодулятора.
Описанный демодулятор ОФМ [1] является в известной мере математической моделью, поясняющей принципы демодуляции сигналов ОФМ, реализация которой связана со значительными трудностями по следующим причинам.
В реальных условиях на вход демодулятора кроме демодулируемого сигнала ОФМ поступают сигналы от других систем передачи информации, которые в данном случае выступают как источники помех. Частоты таких помех отличны от частоты демодулируемого сигнала, а их уровень зачастую превышает уровень демодулируемого сигнала. Учитывая, что узлы реальных устройств имеют ограниченный динамический диапазон, рекомендуется [2, с. 263] при демодуляции для ослабления влияния помех, находящихся вне полосы частот демодулируемого сигнала, предварительно осуществлять его фильтрацию.
Принимая во внимание тот факт, что в сигнале ОФМ информационным параметром является изменение фазы несущей, рекомендуется [3, с. 220] для повышения помехозащищенности демодуляции сигналов ОФМ после их фильтрации осуществлять ограничение сигнала, формируя из гармонического сигнала S(t) последовательность Sn(t) прямоугольных импульсов, соответствующих знаку мгновенных значений сигнала S(t). Это упрощает реализацию последующих узлов, так как позволяет в условиях изменения уровня демодулируемого сигнала обходиться без использования системы автоматической регулировки уровня.
Приведенный выше способ [1] демодуляции предполагает вычисление двух корреляционных функций сигнала ОФМ с двумя ортогональными опорными колебаниями, подобными во всем (кроме фазы) демодулируемому сигналу. Поэтому при демодуляции прямоугольной последовательности импульсов Sn(t) естественно использовать в качестве опорных сигналов последовательности импульсов прямоугольной формы. Это обеспечивает достижение конструктивной простоты и надежности при реализации демодулятора ОФМ [4, с. 55, 56, 101]
В известном способе демодуляции сигналов ОФМ [1] после получения отсчетов Xn Yn упомянутых корреляционных функций вычисляют оценку фазы Φп сигнала по правилу:
Φп = arctg(Yn/Xn). (2)
При этом получают оптимальную оценку фазы Φп [5, с. 380] линейно зависящую от фазы демодулируемого сигнала Φ. Однако в условиях, когда демодулируемый сигнал ограничивают и используют в качестве опорных сигналов последовательности прямоугольных импульсов, оценка фазы vп, вычисленная по правилу (2), перестает быть оптимальной, так как не обеспечивает линейность зависимости оценки Φп от фазы демодулируемого сигнала Φ, что соответственно приводит к снижению помехоустойчивости демодуляции сигналов ОФМ. Кроме того, реализация блока вычисления Arctg (Yn/Xn) требует больших аппаратных затрат.
Целью предлагаемого изобретения является повышение помехоустойчивости демодуляции сигналов ОФМ за счет получения линейной зависимости оценки фазы vп от фазы демодулируемого сигнала в условиях изменения в широких пределах уровня демодулируемого сигнала и упрощение реализации демодулятора.
Поставленная цель достигается тем, что в способе демодуляции сигналов ОФМ, заключающемся в формировании пары опорных последовательностей прямоугольных импульсов cn(t) и sn(t), соответствующих знаку мгновенных значений синфазного cos (2•π•fo•t), и квадратурного sin(2•p•fo•t) гармонических сигналов с частотой fo, равной средней частоте демодулируемого сигнала, ,
,
где Sign(z) операция определения знака z;
в фильтрации, в формировании путем ограничения демодулируемого сигнала S(t) последовательности Sn(t) прямоугольных импульсов, соответствующих знаку мгновенных значений этого сигнала,
Sn Sign[S(t)] (5)
в вычислении на длительности элемента T сигнала двух корреляционных функций Y и X последовательности Sn(t) прямоугольных импульсов с упомянутыми опорными импульсными последовательностями cn(t) и sn(t) соответственно

получении в момент окончания элемента сигнала отсчетов Yn и Xn указанных корреляционных функций, принятии решения о переданном информационном символе на основе сформированной оценки фазы сигнала Φп, определяют знаки отсчетов Yn и Xn, вычисляют абсолютные значения отсчетов  формируют оценку фазы Φп сигнала по правилу:
формируют оценку фазы Φп сигнала по правилу: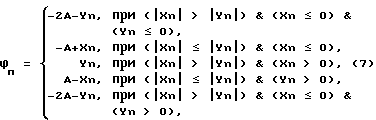
где A константа, A π/2;
операция конъюнкции.
Для этого в демодуляторе сигналов ОФМ, состоящем из последовательно соединенных фильтра, ограничителя, а также из двух корреляторов, двух блоков стробирования, решающего блока, генератора опорного колебания, фазовращателя, двух блоков выделения знака и генератора тактовых импульсов, причем первые входы корреляторов соединены вместе и подключены к выходу ограничителя, вход первого блока стробирования соединен с выходом первого коррелятора, вход второго блока стробирования подключен к выходу второго коррелятора, второй вход первого коррелятора соединен с выходом первого блока выделения знака, вход которого вместе с входом фазовращателя подключен к выходу генератора опорного колебания, второй вход второго коррелятора соединен с выходом второго блока выделения знака, вход которого подключен к выходу фазовращателя, входы установки корреляторов соединены вместе и подключены к первому выходу генератора тактовых импульсов, входы управления блоков стробирования соединяются вместе и подключены к второму выходу генератора тактовых импульсов; вход фильтра служит входом демодулятора, выходом которого является выход решающего блока, введен блок формирования оценки фазы, состоящий из двух инверторов, двух блоков выделения знака, коммутатора, двух блоков вычисления модуля, блока сравнения, генератора констант, сумматора. Первый информационный вход коммутатора вместе с входом первого инвертора, входом третьего блока выделения знака и входом первого блока вычисления модуля служат первым входом блока формирования оценки фазы и подключены к выходу первого блока стробирования; четвертый информационный вход коммутатора вместе с входом второго инвертора, входом четвертого выделения знака и входом второго блока вычисления модуля служат вторым входом блока информирования оценки фазы и подключены к выходу второго блока стробирования. Выход первого инвертора соединен с вторым информационным входом коммутатора. Выход второго инвертора соединен с третьим информационным входом коммутатора. Выход третьего блока выделения знака подключен к соединенным вместе первым управляющим входам коммутатора и генератора констант. Выход четвертого блока выделения знака подключен к соединенным вместе вторым управляющим входам коммутатора и генератора констант. Выход первого блока вычисления модуля подключен к первому входу блока сравнения, второй вход которого подключен к выходу первого блока вычисления модуля. Выход блока сравнения подключен к соединенным вместе третьим управляющим входам коммутатора и генератора констант. Выход коммутатора подключен к первому входу сумматора, второй вход которого соединен с выходом генератора констант, выход сумматора служит выходом блока формирования оценки фазы и соединен с входом решающего блока.
Таким образом, авторы претендуют на следующие отличительные признаки.
1. При демодуляции сигналов ОФМ выделяют знаки отсчетов корреляционных функций Yn, Xn, вычисляют абсолютные значения отсчетов  формируют оценку фазы Φп сигнала по правилу (7).
формируют оценку фазы Φп сигнала по правилу (7).
Этот признак позволяет повысить помехоустойчивость демодуляции сигналов ОФМ за счет получения линейной зависимости оценки фазы Φп от фазы демодулируемого сигнала в широком диапазоне изменения его уровней и упростить реализацию демодулятора.
2. В состав устройства демодуляции сигналов ОФМ введен блок формирования оценки фазы, состоящий из двух инверторов, двух блоков выделения знака, коммутатора, двух блоков вычисления модуля, блока сравнения, генератора констант, сумматора. Первый информационный вход коммутатора вместе с входом первого инвертора, входом третьего блока выделения знака и входом первого блока вычисления модуля служат первым входом блока формирования оценки фазы и подключены к выходу первого блока стробирования. Четвертый информационный вход коммутатора вместе с входом второго инвертора, входом четвертого блока выделения знака и входом второго блока вычисления модуля служат вторым входом блока формирования оценки фазы и подключены к выходу второго блока стробирования. Выход первого инвертора соединен с вторым информационным входом коммутатора. Выход второго инвертора соединен с третьим информационным входом коммутатора. Выход третьего блока выделения знака подключен к соединенным вместе первым управляющим коммутатора и генератора констант. Выход четвертого блока выделения знака подключен к соединенным вместе вторым управляющим входам коммутатора и генератора констант. Выход первого блока вычисления модуля подключен к первому входу блока сравнения, второй вход которого подключен к выходу второго блока вычисления модуля. Выход блока сравнения подключен к соединенным вместе третьим управляющим входам коммутатора и генератора констант. Выход коммутатора подключен к первому выходу сумматора, второй вход которого соединен с выходом генератора констант. Выход сумматора служит выходом блока формирования оценки фазы и соединен с входом решающего блока.
Этот признак позволяет повысить помехоустойчивость демодулятора сигналов ОФМ за счет получения линейной зависимости оценки фазы Φп от фазы демодулируемого сигнала в широком диапазоне изменения его уровней и упростить реализацию демодулятора.
Анализ показывает, что заявляемые технические решения обладают существенными отличиями.
Предлагаемое изобретение поясняется примером конкретного выполнения демодулятора ОФМ, приведенного на фиг. 1, содержащего фильтр 1, ограничитель 2, первый коррелятор 3, второй коррелятор 4, первый блок стробирования 5, второй блок стробирования 6, решающий блок 7, генератор опорного колебания 8, фазовращатель 9, первый блок выделения знака 10, второй блок выделения знака 11, генератор тактовых импульсов 12, блок формирования оценки фазы 13, состоящий из первого инвертора 14, второго инвертора 15, третьего блока выделения знака 16, четвертого блока выделения знака 17, коммутатора 18, первого и второго блоков вычисления модуля 19 и 20, соответственно, блока сравнения 21, генератора констант 22, сумматора 23.
Работа заявляемого устройства происходит следующим образом.
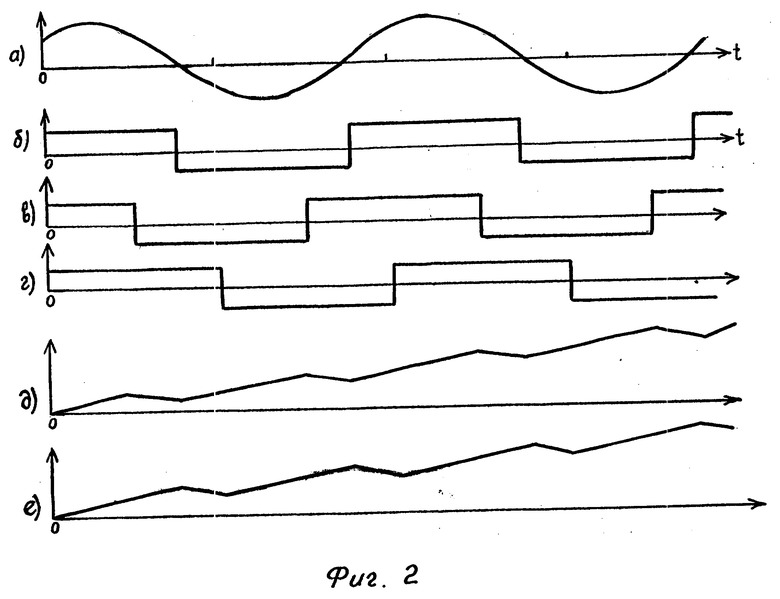
Приходящий по каналу связи сигнал S(t) поступает на вход фильтра 1, являющийся выходом демодулятора, в фильтре 1 осуществляется ослабление частотных составляющих, находящихся вне полосы частот демодулируемого сигнала. С выхода фильтра 1 сигнал поступает на ограничитель 2. Порог ограничения ограничителя 2 выбирается таким, чтобы из принимаемого гармонического сигнала S(t) на выходе ограничителя формировалась последовательность прямоугольных импульсов Sn(t), соответствующих знаку мгновенных значений выходного сигнала фильтра 1 и описываемых выражением (5). Последовательность прямоугольных импульсов Sn(t) с выхода ограничителя 2 подается на первые входы первого и второго корреляторов 3 и 4; на вторые входы корреляторов с выходов первого 10 и второго 11 блоков выделения знака подаются опорные сигналы пара ортогональных последовательностей прямоугольных импульсов cn(t) и sn(t), соответствующих знаку мгновенных значений синфазного Cos (2•π•fo•t) и квадратурного Sin (2•p•fo•t) гармонических сигналов с частотой fo, равной средней частоте демодулируемого сигнала, и описываемых выражениями (3б), (3а). На выходах корреляторов 3 и 4 в соответствии с выражением (6а), (6б) формируются сигналы Y и X, являющиеся корреляционными функциями последовательности прямоугольных импульсов Sn(t) и опорных сигналов cn(t), sn(t) соответственно.
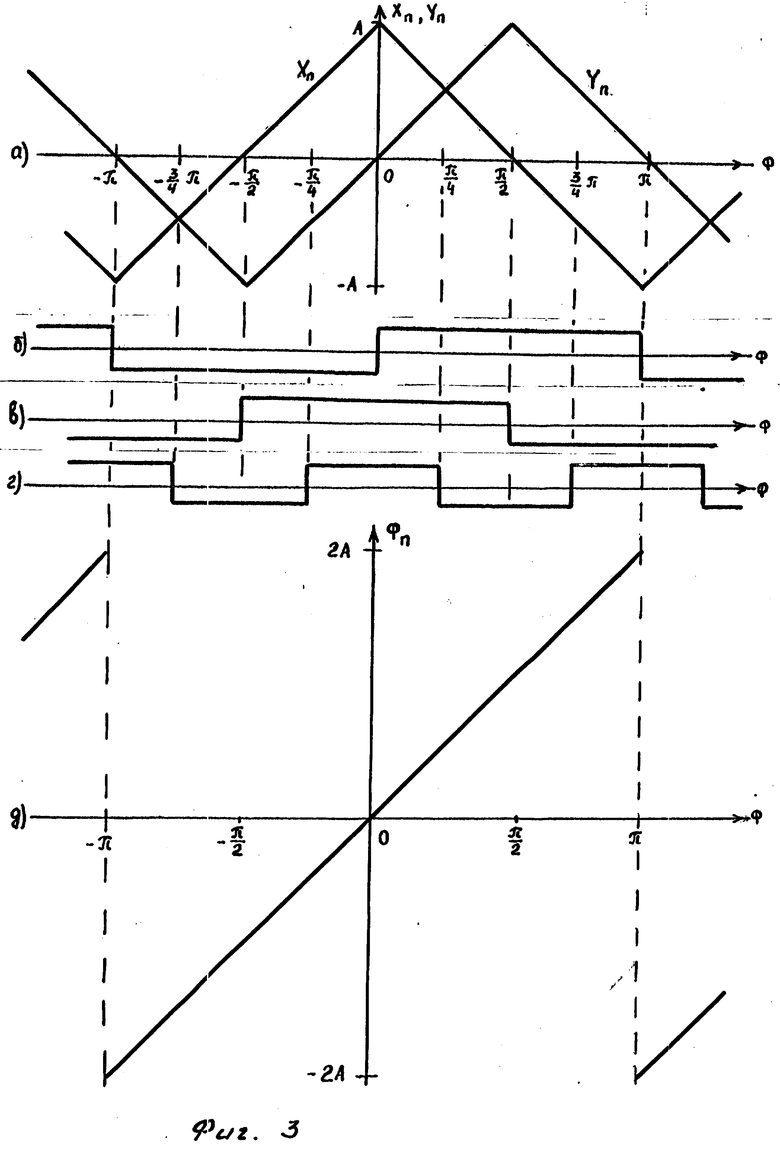
На фиг. 2 приведены временные диаграммы, поясняющие работу корреляторов: на фиг. 2а изображена временная диаграмма демодулирующего сигнала S(t), на фиг. 2б изображена временная диаграмма выходного сигнала Sn(t) ограничителя 2, на фиг. 2в, 2г изображены опорные сигналы cn(t), sn(t), формируемые в первом 10 и втором 11 блоках выделения знака и подаваемые на вторые входы первого 3 и второго 4 корреляторов, соответственно; на фиг. 2д, 2е показано формирование корреляционных функций Y(t), X(t) на выходах корреляторов 3 и 4 соответственно. Приведенный на фиг. 2 пример соответствует случаю, когда разность фаз демодулируемого сигнала и опорных колебаний равна /4.
В момент времени t n T, соответствующий моменту окончания элемента демодулируемого сигнала ОФМ, по управляющему сигналу с второго выхода генератора тактовых импульсов 12 через блоки стробирования 5 и 6 отсчеты Yn и Xn корреляционных функций подаются на первый и второй входы блока формирования оценки фазы 13. Затем управляющим сигналом с первого выхода генератора тактовых импульсов 12 осуществляется сброс корреляторов 3 и 4, после чего начинается вычисление корреляционных функций (6а), (6б) на следующем (n+1)-м элементе демодулируемого сигнала. Генератор тактовых импульсов 12 строится таким образом, чтобы моменты появления его выходных сигналов соответствовали границам элементов демодулируемого сигнала.
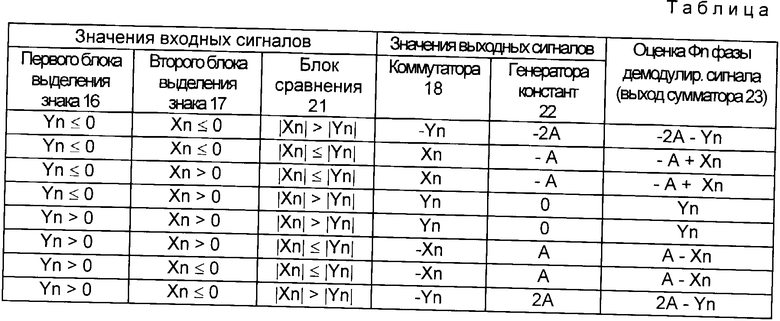
Зависимость уровней отсчетов Yn и Xn корреляционных функций от фазы v демодулируемого сигнала имеет вид пилообразных функций с размахом A (где константа A /2), представленных на фиг 3а. Отсчет Yn с выхода первого блока стробирования 5 подается на первый вход блока формирования оценки фазы 13, на второй вход блока формирования оценки фазы 13 подается отсчет Xn с выхода второго блока стробирования 6. Отсчет Yn с первого входа блока формирования оценки фазы 13 поступает на соединенные вместе первый информационный вход коммутатора 18, вход первого инвертора 14, вход третьего блока выделения знака 16, и вход первого блока вычисления модуля 19; отсчет Xn с второго входа блока формирования оценки фазы 13 поступает на соединенные вместе четвертый информационный вход коммутатора 18, вход второго инвертора 15, вход четвертого блока выделения знака 17 и вход второго блока вычисления модуля 21. Проинвертированный в первом инверторе 14 отсчет Yn подается на второй информационный вход коммутатора 18, на третий информационный вход коммутатора 18 подается проинвертированный во втором инверторе 15 отсчет Xn. Знак отсчета Yn, сформированный в третьем блоке выделения знака 16, подается на соединенные вместе первые управляющие входы коммутатора 18 и генератора констант 22. Знак отсчета Xn, сформированный в четвертом блоке выделения знака 17, подается на соединенные вместе вторые управляющие входы коммутатора 18 и генератора констант 22. На третьи управляющие входы коммутатора 18 и генератора констант 22 с выхода блока сравнения 21 подается результат сравнения абсолютных значений отсчетов  вычисленных в первом 19 и втором 20 блоках вычисления модуля. Выходной сигнал коммутатора 18 поступает на первый вход сумматора 23, на второй вход сумматора 23 подается сигнал с выхода генератора констант 22. На выходе сумматора 23 в соответствии с правилом (7) формируется оценка фазы Φп демодулируемого сигнала. Значения оценки фазы Φп демодулируемого сигнала (выходного сигнала сумматора 23), которые определяются выходными сигналами третьего 16, четвертого 17 блоков выделения знака и блока сравнения 21, приведены в таблице 1; в таблице также приведены значения сигналов коммутатора 18 и генератора констант 22.
вычисленных в первом 19 и втором 20 блоках вычисления модуля. Выходной сигнал коммутатора 18 поступает на первый вход сумматора 23, на второй вход сумматора 23 подается сигнал с выхода генератора констант 22. На выходе сумматора 23 в соответствии с правилом (7) формируется оценка фазы Φп демодулируемого сигнала. Значения оценки фазы Φп демодулируемого сигнала (выходного сигнала сумматора 23), которые определяются выходными сигналами третьего 16, четвертого 17 блоков выделения знака и блока сравнения 21, приведены в таблице 1; в таблице также приведены значения сигналов коммутатора 18 и генератора констант 22.
Зависимость оценки Φп от фазы демодулируемого сигнала Φ приведена на фиг. 3д; для справки на фиг. 3б, 3г приведены выходные сигналы третьего 16, четвертого 17 блоков выделения знака и блока сравнения 21, соответственно.
Оценка фазы vп с выхода блока формирования оценки фазы 13 (с выхода сумматора 23) поступает на решающий блок 7, где по одному из известных методов, например, по методу сравнения фаз принимается решение о переданном информационном символе, который поступает на выход демодулятора.
Работа заявляемого способа заключается в последовательной реализации заявляемым устройством следующих операций:
1. Формируют пару опорных последовательностей прямоугольных импульсов cn(t)( и sn(t), соответствующих знаку мгновенных значений синфазного Cos(2•π•fo•t), и квадратурного Sin(2•p•fo•t) гармонических сигналов с частотой fo, равной частоте демодулируемого сигнала, фильтруют, ограничивают демодулируемый сигнал S(t), формируя из него последовательность Sn(t) прямоугольных импульсов, соответствующих знаку мгновенных значений этого сигнала, вычисляют на длительности элемента сигнала пару корреляционных функций Y и X последовательности Sn(t) с упомянутыми опорными импульсными последовательностями cn(t) и sn(t)соответственно, берут в момент окончания элемента сигнала отсчеты Yn и Xn указанных корреляционных функций.
Данные операции, как указывалось выше, выполняются фильтром 1, ограничителем 2, первым коррелятором 3, вторым коррелятором 4, первым блоком стробирования 5, вторым блоком стробирования 6, генератором опорного колебания 8, фазовращателем 9, первым блоком выделения знака 10, вторым блоком выделения знака 11, генератором тактовых импульсов 12.
2. Формируют оценку фазы vп сигнала, которую используют для принятия решения о переданном информационном символе.
Данные операции выполняются с помощью формирования оценки фазы 13 и решающего блока 7.
3. Определяют знаки отсчетов Yn и Xn, вычисляют абсолютные значения отсчетов  которые используют при получении оценки фазы Φп сигнала по правилу (7).
которые используют при получении оценки фазы Φп сигнала по правилу (7).
Данные операции выполняются с помощью первого инвертора 14, второго инвертора 13, третьего блока выделения знака 16, четвертого блока выделения знака 17, коммутатора 18, первого и второго блоков вычисления модуля 19 и 20, соответственно, блока сравнения 21, генератора констант 22, сумматора 23.
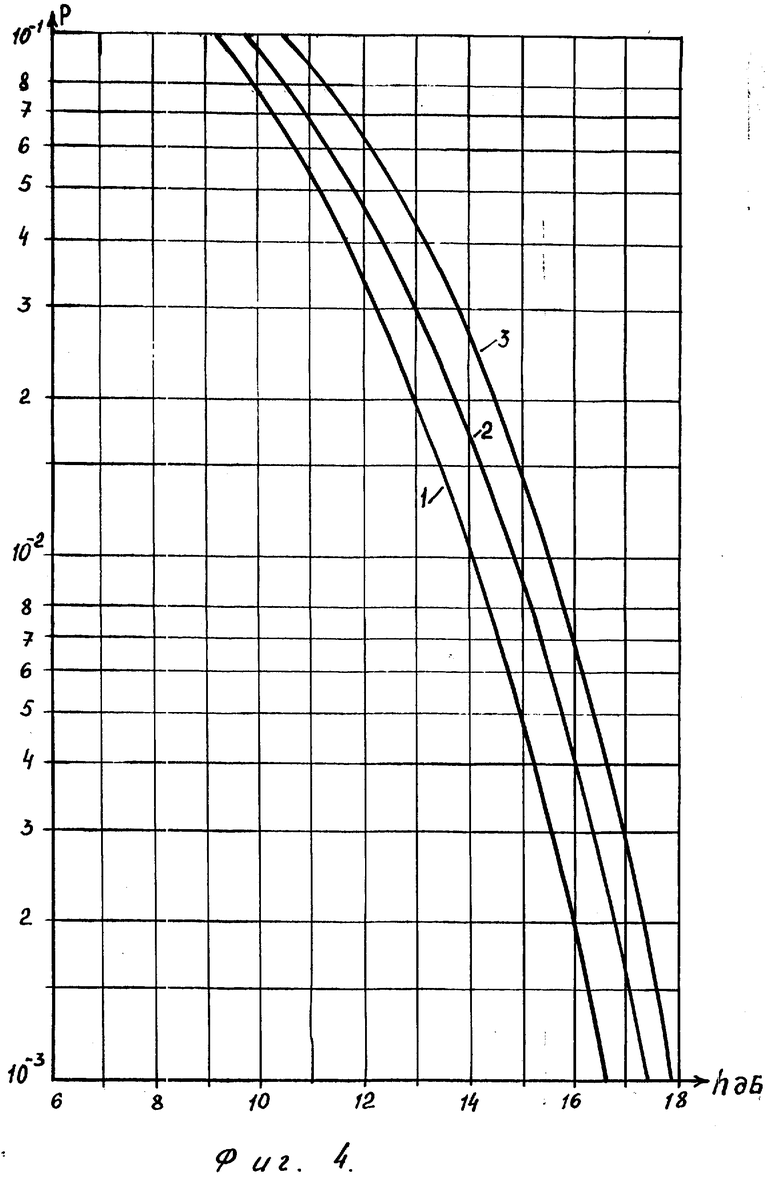
С целью подтверждения получения положительного эффекта проведены сравнительные испытания на имитационной модели заявляемых способа и устройства и соответствующих им прототипов. Для сигналов с двукратной относительной фазовой модуляцией получены кривые помехоустойчивости (зависимости частоты ошибок P от отношения сигнал/шум h в канале связи) сравниваемых демодуляторов.
Результаты испытаний представлены на фиг. 4, где кривая характеризует помехоустойчивость заявляемого объекта, кривая 3 помехоустойчивость прототипа; кривая 2 приведена для справки. Она характеризует помехоустойчивость упоминавшегося выше демодулятора, в котором после фильтрации осуществляется ограничение сигнала, в качестве опорных используются гармонические сигналы, а для оценки фазы осуществляется вычисление функции arctg(Yn/Xn). Результаты испытаний подтверждают получение положительного эффекта; заявляемый демодулятор обеспечивает выигрыш по мощности (1,3 1,5) дБ по сравнению с прототипом и около 0,8 дБ по сравнению с упоминавшимся демодулятором с гармоническими опорными сигналами и вычислением оценки фазы по формуле arctg(Yn/Xn), который сложнее в реализации.
Особенность заявляемых способа и устройства заключается в том, что положительный результат достигается также, если в выражениях (4), (7) и таблице знаки отношения ">" и "≅" заменить на знаки "≥" и "<" соответственно.
Блоки, входящие в состав заявляемого устройства известны в технике. Для их реализации могут быть использованы как соответствующие блоки известного устройства [1] так и блоки, описанные в литературе.
В качестве фильтра 1 можно использовать полосовой фильтр, требования к которому сформулированы в [2, с. 263]
В качестве ограничителя 2, первого 10, второго 11, третьего 14, четвертого 15 блоков выделения знака можно использовать усилители-ограничители, варианты реализации которых можно найти в книге Титце У. Шенк К. Полупроводниковая схемотехника: Справочное руководство. / Пер. с нем. М. Мир, 1983 [6]
В качестве первого коррелятора 3, второго коррелятора 4, первого блока стробирования 5, второго блока стробирования 6, решающего блока 7, генератора опорного колебания 8, фазовращателя 9, генератора тактовых импульсов 12 могут быть использованы соответствующие блоки из известного устройства [1]
Варианты реализации первого 14 и второго инверторов 15, коммутатора 18, первого 19 и второго 20 блоков вычисления модуля, блока сравнения 21, сумматора 23 можно найти в [6]
В качестве источника констант 22 может быть использовано постоянное запоминающее устройство, варианты построения которого также приведены в [6]
Подобное выполнение заявляемых способа и устройства позволяет повысить помехоустойчивость демодуляции сигналов ОФМ за счет получения линейной зависимости оценки фазы Φ от фазы демодулируемого сигнала vп в условиях изменения уровня демодулируемого сигнала в широких пределах и упростить реализацию демодулятора.
Список источников
1. Спилкер Дж. Цифровая спутниковая связь. Пер. с англ. / Под ред. В.В. Маркова. М. Связь, 1979.
2. Фалько А. И. Зюко А.Г. Радиопрограммные устройства. / Под ред. А.Г. Зюко. М. Связь, 1975.
3. Петрович Н.Т. Передача дискретной информации в каналах с фазовой манипуляцией. М. Советское радио, 1965.
4. Заездный А.М. Окунев Ю.Б. Рахович Л.Н. Фазо-разностная модуляция, - М. Связь, 1967.
5. Пестряков В.Б. Фазовые радиотехнические системы. М. Советское радио, 1968.
6. Титце У. Шенк К. Полупроводниковая схемотехника: Справочное руководство. / Пер. с нем. М. Мир, 1982.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДЕМОДУЛЯЦИИ СИГНАЛОВ ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МОДУЛЯЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2450470C1 |
| СПОСОБ ДЕМОДУЛЯЦИИ СИГНАЛОВ ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МОДУЛЯЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2485707C1 |
| КОРРЕЛЯЦИОННЫЙ ПРИЕМНИК СИГНАЛОВ С ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МОДУЛЯЦИЕЙ | 1995 |
|
RU2099893C1 |
| СПОСОБ ДЕМОДУЛЯЦИИ СИГНАЛОВ ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МОДУЛЯЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2408996C2 |
| СПОСОБ КОРРЕЛЯЦИОННОГО ПРИЁМА СИГНАЛОВ С ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МОДУЛЯЦИЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2237978C2 |
| СПОСОБ ДЕМОДУЛЯЦИИ СИГНАЛОВ С ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МОДУЛЯЦИЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2271071C2 |
| ДЕМОДУЛЯТОР СИГНАЛОВ С ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МОДУЛЯЦИЕЙ | 2011 |
|
RU2460225C1 |
| ДЕМОДУЛЯТОР СИГНАЛОВ С ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МОДУЛЯЦИЕЙ | 2011 |
|
RU2460224C1 |
| ДЕМОДУЛЯТОР СИГНАЛОВ С ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МОДУЛЯЦИЕЙ | 2014 |
|
RU2549360C1 |
| УСТРОЙСТВО ПОДАВЛЕНИЯ УЗКОПОЛОСНЫХ И ИМПУЛЬСНЫХ ПОМЕХ | 1996 |
|
RU2115237C1 |
Изобретение относится к области приема цифровых сигналов, передаваемых методом относительной фазовой модуляции (ОФМ), и может быть использовано при построении аппаратуры передачи цифровой информации. В демодулятор сигналов ОФМ, состоящий из последовательно соединенных фильтра, ограничителя, а также из двух параллельно включенных корреляторов, двух блоков стробирования, решающего блока, генератора опорного колебания, фазовращателя, двух блоков выделения знака и генератора тактовых импульсов; введен блок формирования оценки фазы, состоящий из двух инверторов, двух блоков выделения знака, коммутатора, двух блоков вычисления модуля, блока сравнения, генератора констант, сумматора. Заявляемый способ реализуется через работу вышеописанного устройства. Подобное выполнение заявляемых способа и устройства позволяет повысить помехоустойчивость демодуляции сигналов ОФМ за счет получения линейной зависимости оценки фазы Φп от фазы демодулируемого сигнала Φ в условиях изменения уровня демодулируемого сигнала в широких пределах и упростить реализацию демодулятора. 2 с.п. ф-лы, 4 ил., 1 табл.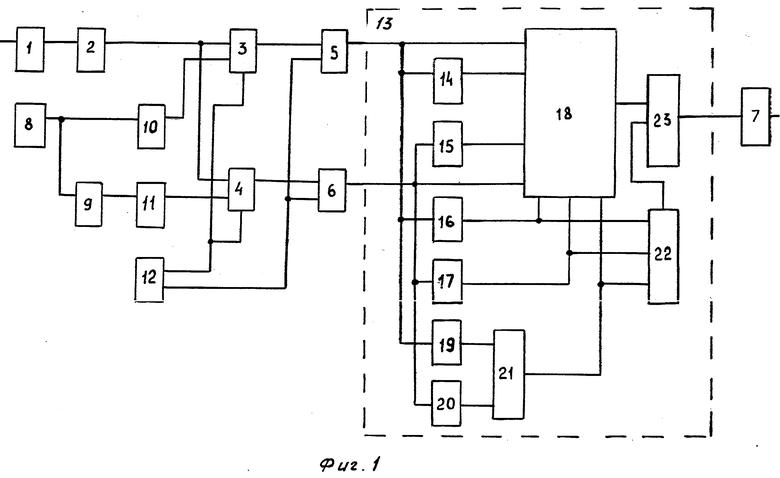





где А константа, A = π/2.
2. Демодулятор сигналов с относительной фазовой модуляцией, состоящей из фильтра, из двух корреляторов, двух блоков стробирования, решающего блока, генератора опорного колебания, фазовращателя и генератора тактовых импульсов, причем вход первого блока стробирования соединен с выходом первого коррелятора, вход второго блока стробирования подключен к выходу второго коррелятора, вход фазовращателя подключен к выходу генератора опорного колебания, входы установки обоих корреляторов соединены вместе и подключены к первому выходу генератора тактовых импульсов, входы управления обоих блоков стробирования соединяются с вторым выходом генератора тактовых импульсов, вход фильтра служит входом демодулятора, выходом которого является выход решающего блока, отличающийся тем, что введены ограничитель, два блока выделения знака и блок формирования оценки фазы, состоящий из двух инверторов, двух блоков выделения знака, коммутатора, двух блоков вычисления модуля, блока сравнения, генератора констант, сумматора, причем выход фильтра соединен с входом ограничителя, выход которого подключен к соединенным вместе первым входам корреляторов, второй вход первого коррелятора соединен с выходом первого блока выделения знака, вход которого подключен к выходу генератора опорного колебания, второй вход второго коррелятора соединен с выходом второго блока выделения знака, вход которого подключен к выходу фазовращателя, первый информационный вход коммутатора вместе с входом первого инвертора, входом третьего блока выделения знака и входом первого блока вычисления модуля служат первым входом блока формирования оценки фазы и соединены с выходом первого блока стробирования, четвертый информационный вход коммутатора вместе с входом второго инвертора, входом четвертого блока выделения знака и входом второго блока вычисления модуля служат вторым входом блока формирования оценки фазы и соединены с выходом второго блока стробирования, выход первого инвертора соединен с вторым информационным входом коммутатора, выход второго инвертора соединен с третьим информационным входом коммутатора, выход третьего блока выделения знака подключен к соединенным вместе первым управляющим входам коммутатора и генератора констант, выход четвертого блока выделения знака подключен к соединенным вместе вторым управляющим входам коммутатора и генератора констант, выход первого блока вычисления модуля подключен к первому входу блока сравнения, второй вход которого подключен к выходу второго блока вычисления модуля, выход блока сравнения подключен к соединенным вместе третьим управляющим входам коммутатора и генератора констант, выход коммутатора подключен к первому входу сумматора, второй вход которого подключен к выходу генератора констант, выход сумматора служит выходом блока формирования оценки фазы и соединен с входом решающего блока.
| Спилкер Дж | |||
| Цифровая спутниковая связь / Пер.с англ | |||
| под ред | |||
| Маркова В.В | |||
| - М.: Связь, 1979, с | |||
| АВТОМАТ ДЛЯ ПУСКА В ХОД ПОРШНЕВОЙ МАШИНЫ | 1920 |
|
SU299A1 |
