Изобретение относится к области радиоэлектроники, в частности, акустоэлектроники, и может быть использовано в качестве регулируемого акустоэлектронного устройства временной или фазовой селекции сигналов, например, в качестве регулируемой ультразвуковой линии задержки, в различных радиоэлектронных системах обработки сигнальной информации.
Известны регулируемые акустоэлектронные устройства временной и фазовой селекции сигналов, в частности регулируемые ультразвуковые линии задержки (РУЛЗ), содержащие пьезокристаллический звукопровод, выполненный из полидоменного монокристалла сегнетоэластика-сигнетоэлектрика, изоморфного молибдату гадолиния, в виде пластины Z-среза, содержащей по крайней мере два разнополярных домена, разделенных плоской доменной границей (ПДГ), основные входной и выходной преобразователи объемных акустических волн (ОАВ), находящиеся в акустическом контакте со звукопроводом и расположенные на его одной или обеих противолежащих рабочих торцовых гранях, перпендикулярных Z-граням звукопровода, и образующие вместе с ПДГ информационный акустический канал, управляющие электроды, расположенные на двух противолежащих Z-гранях звукопровода в рабочей области перемещения ПДГ и подсоединенные к выходу регулируемого источника постоянного электрического напряжения.
Основным недостатком таких регулируемых акустоэлектронных устройств является невысокая точность регулирования информационного параметра (в частности, величины времени задержки сигнала в РУЛЗ ОАВ), обусловленная низкой воспроизводимостью промежуточной регулировочной характеристики устройства: "изменение величины управляющего сигнала на выходе регулируемого источника напряжения изменение местоположения доменной границы в звукопроводе", связанной с наличием отклонений в стехиометрическом составе монокристаллического материала звукопровода, степенью его дефектности, униполярности и т. д. приводящим к практически непредсказуемому изменению реальных величин коэрцетивных полей монокристалла и, как следствие, к нарушению однозначности и воспроизводимости регулировочной характеристики устройства: "величина управляющего электрического сигнала напряжения - величина регулируемой временной задержки сигнала".
Наиболее близким к изобретению по технической сущности является другое известное регулируемое акустоэлектронное устройство, выполняющее функции регулируемого фазового или временного сдвига, в частности, и функции РУЛЗ ОАВ, выбранное в качестве устройства прототипа, содержащее пьезокристаллический звукопровод, выполненный из полидоменного монокристалла сегнетоэластика-сегнетоэлектрика, изоморфного молибдату гадолиния, в виде пластины Z-среза, содержащей по крайней мере два разнополярных домена, разделенных плоской доменной границей (ПДГ), основные входной и выходной преобразователи объемных акустических волн (ОАВ), находящиеся в акустическом контакте со звукопроводом и расположенные на его одной или двух противолежащих рабочих торцовых гранях, перпендикулярных Z-граням звукопровода, и образующие вместе с ПДГ информационный акустический канал, управляющие электроды, расположенные на двух противолежащих Z-гранях звукопровода и рабочей области перемещения ПДГ и подсоединенные к выходу регулируемого источника электрического напряжения, вход которого через блок формирования сигнала управления соединен с выходным преобразователем ОАВ контрольно-измерительного акустического канала, а входной преобразователь последнего соединен с генератором опорного синусоидального сигнала [2]
В этом известном регулируемом акустоэлектронном устройстве отработка заданной величины регулируемого информативного параметра (фазового сдвига, временной задержки) осуществляется с использованием отрицательной обратной связи по положению ПДГ в звукопроводе, благодаря чему оно характеризуется достаточно высокой точностью регулирования. Однако это имеет место только для очень узкого диапазона регулирования информативного параметра, в частности, ограниченного десятыми долями процента для РУЛЗ ОАВ. Обусловлено это несколькими причинами. Прежде всего, топология данного регулируемого акустоэлектронного устройства ограничивает максимальный потенциально возможный диапазон регулирования величины времени задержки информационного сигнала значением, не превышающим 3% от его номинальной величины (см. например, [1] ). Кроме того, используемая топология, принципиально ограничивающая облсть пространственного перемещения ПДГ из-за необходиомсти размещения преобразователей этого канала по разные стороны от нее (см. [2]), еще более сужает (в несколько раз) диапазон регулирования. Наконец, дополнительное сужение достижимого диапазона регулирования в известном устройстве связано и с необходимостью реализации однозначной зависимости выходного сигнала контрольно-измерительного канала относительно величины смещения ПДГ. В результате, приемлемая точность регулирования величины времени задержки в устройстве-прототипе оказывается достижимой лишь в диапазоне регулирования, не превышающем нескольких десятых долей процента.
Технический результат, на достижение которого направлено заявляемое изобретение, заключается в обеспечении высокой точности регулирования величины информативного параметра, гарантируемой использованием цепи отрицательной обратной связи по положению ПДГ, в широком диапазоне его регулирования, в частности, в обеспечении высокой точности регулирования величины времени задержки в РУЛЗ ОАВ в диапазоне его регулирования до десятков и сотен процентов от номинального значения. Реализация этого, на основе использования цепи отрицательной обратной связи по положению ПДГ в звукопроводе устройства, предполагает обеспечение условий расширения диапазона контралируемого цепью отрицательной обратной связи пространственного положения ПДГ.
Сущность предлагаемого изобретения заключается в том, что в регулируемом акустоэлектронном устройстве, содержащем пьезоэлектрический звукопровод, выполненный из полидоменного монокристалла сегнетоэластика-сегнетоэлектрика, изоморфного молибдату гадолиния, в виде пластины Z-среза, содержащей по крайней мере два разнополярных домена, разделенных плоской доменной границей (ПДГ), основные входной и выходной преобразователи объемных акустических волн (ОАВ), находящиеся в акустическом контакте со звукопроводом и расположенные на его одной или двух противолежащих рабочих торцовых гранях, перпендикулярных Z-граням звукопровода, и образующие вместе с ПДГ информационный акустический канал, согласно изобретению в него введены дополнительные входной и выходной преобразователи ОАВ, также находящиеся в акустическом контакте со звукопроводом, размещенные в рабочей области перемещения ПДГ с полным ее перекрытием со стороны двух противолежащих торцовых граней звукопровода, ортогональных указанным выше граням и рабочим торцовым граням, и образующие контрольно-измерительный акустический канал, генератор опорного синусоидального сигнала, выход которого соединен с выходным дополнительным преобразователем ОАВ, и блок формирования сигнала управления, включенный между входом регулируемого источника постоянного электрического напряжения и выходным дополнительным преобразователем ОАВ, при этом в качестве преобразователей ОАВ контрольно-измерительного акустического канала использованы пьезоэлектрические преобразователи продольной моды колебаний, расположенные со стороны торцовых граней звукопровода, перпендикулярных плоскости ПДГ, и размещенные в рабочей области перемещения ПДГ с полным ее перекрытием, при этом один из преобразователей контрольно-измерительного акустического канала выполнен двухсекционным с акустически противофазными секциями одинаковой апертуры, акустический контакт каждого из преобразователей контрольно-измерительного акустического канала выполнен с использованием иммерсионного слоя, а в качестве блока формирования сигнала управления использован амплитудно-фазовый детектор с элементом сравнения с установкой.
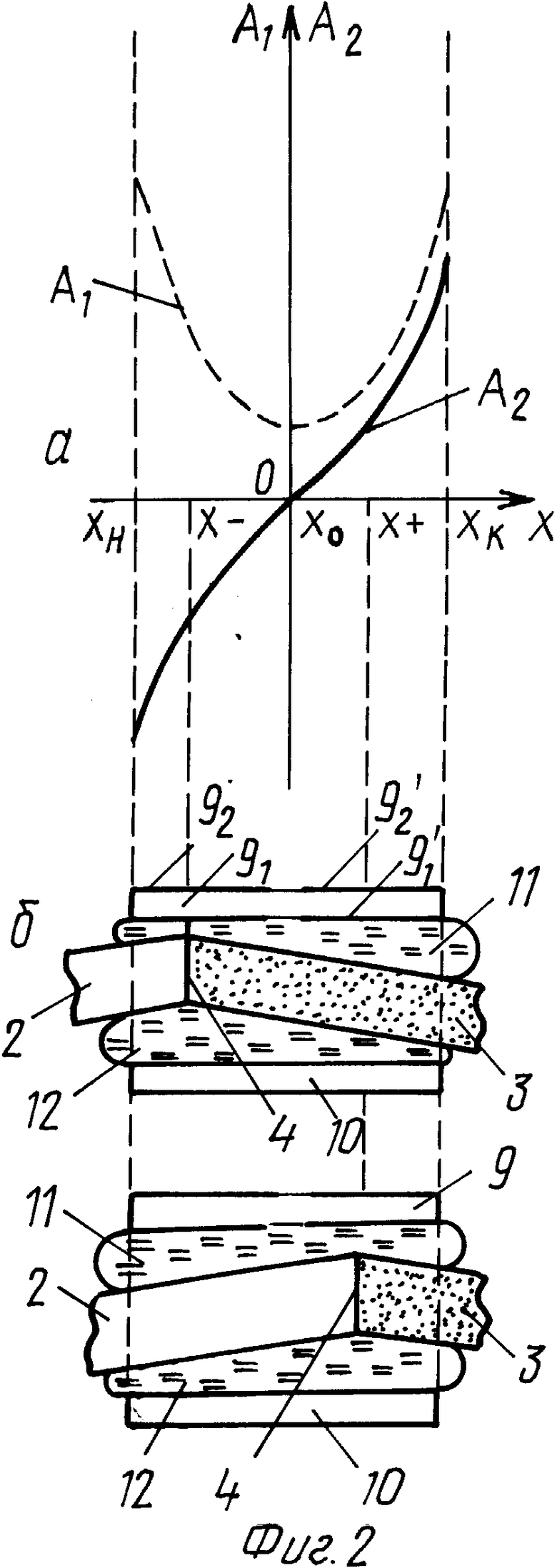
На фиг. 1, а, б схематично изображено регулируемое акустоэлектронное устройство (показаны два варианта его конструктивного выполнения вид со стороны Z-грани); на фиг. 2 типичная зависимость амплитуды А1 сигнала на выходе датчика пространственного положения ПДГ в звукопроводе и сигнала А2 на выходе амплитудно-фазового детектора блока формирования сигнала управления (фиг. 2, а), а также геометрия контрольно-измерительного акустического канала для двух различных координат х- и х+ пространственного положения ПДГ в рабочей области ее перемещения по звукопроводу фиг. 2, б, в.
Регулируемое акустоэлектронное устройство содержит звукопровод 1, выполненный из полидоменного монокристалла сегнетоэластика-сегнетоэлектрика, изоморфного молибдату гадолиния, например, молибдата тербия или гадолиния, в виде пластины Z-среза (плоскость чертежа на фиг. 1, а, б), содержащей по крайней мере два разнополярных домена 2 и 3, разделенных плоской доменной границей (ПДГ) 4, а также основные входной 5 и выходной 6 пьезопреобразователи объемных акустических волн (ОАВ), находящиеся в акустическом контакте со звукопроводом 1 и расположенные на его одной рабочей торцовой грани 7 (фиг. 1, а) или на двух противолежащих рабочих торцовых гранях 7 и 8 (фиг. 1, б), перпендикулярных Z-граням звукопровода 1; дополнительные входной 9 и выходной 10 преобразователи ОАВ, находящиеся в акустическом контакте со звукопроводом 1 через иммерсионные слои 11 и 12, соответственно, и размещенные со стороны двух его противолежащих торцовых граней 13 и 14, ортогональных одной или обеим рабочим торцовым граням (грань 7 на фиг. 1, а; грани 7 и 8 на фиг. 1, б); управляющие электроды 15 и 16, расположенные на двух противолежащих Z-гранях 13, 14 звукопровода 1 в рабочей области перемещения ПДГ 4, подсоединенные к выходным клеммам 17 и 18, соответственно, регулируемого источника 19 постоянного электрического напряжения, вход которого 20 через блок 21 формирования сигнала управления соединен (клемма 22) с выходным дополнительным преобразователем 10, а выходной дополнительный преобразователь 9 подсоединен (клемма 23) к генератору 24 опорного синусоидального сигнала. Основные преобразователи ОАВ 5 и 6 вместе с ПДГ образуют информационный акустический канал, а электрические выводы 25 и 26 преобразователей 5 и 6 являются соответственно входом и выходом всего устройства. В случае размещения преобразователей 5 и 6 на одной торцовой грани 7 (см. фиг. 1, а), в качестве этих преобразователей предпочтительно использование пьезопреобразователей ОАВ сдвиговой моды колебаний или продольной и сдвиговой мод колебаний (для преобразователей 5 и 6 или 6 и 5 соответственно). В случае же размещения преобразователей 5 и 6 на двух противолежащих торцовых гранях 7 и 8 (см. фиг. 1, б) в качестве этих преобразователей целесообразно использование пьезопреобразователей только различных мод колебаний (сдвиговой и продольной для преобразователей 5 и 6 соответственно или наоборот). Дополнительные преобразователи ОАВ 9 и 10 вместе с ПДГ 4 образуют контрольно-измерительный акустический канал устройства. При этом в качестве преобразователей 9 и 10 использованы пьезопреобразователи ОАВ продольной моды колебаний и, более того, один из них (преобразователь 9 на фиг. 1, а, б) выполнен двухсекционным с акустически противофазными секциями одинаковой апертуры (в частном случае, показанном на фиг.1,а,б, это реализовано за счет электрически противофазного соединения соответствующих электродов 91, 92 и  двух соседних секций двухсекционного преобразователя 9). Преобразователи 9 и 10 расположены со стороны торцовых граней 13, 14, ортогональных плоскости ПДГ 4, и размещены в рабочей области перемещения ПДГ 4 с полным ее перекрытием. В качестве блока 21 формирования сигнала управления использован амплитудно-фазовый детектор 21", электрически последовательно соединенный с элементом сравнения 21' с уставкой ("уставка").
двух соседних секций двухсекционного преобразователя 9). Преобразователи 9 и 10 расположены со стороны торцовых граней 13, 14, ортогональных плоскости ПДГ 4, и размещены в рабочей области перемещения ПДГ 4 с полным ее перекрытием. В качестве блока 21 формирования сигнала управления использован амплитудно-фазовый детектор 21", электрически последовательно соединенный с элементом сравнения 21' с уставкой ("уставка").
Следует отметить, что звукопровод 1 может содержать и более двух разнополярных доменов, разделенных соответствующими дополнительными по отношению к ПДГ 4 доменными границами, однако последние могут находиться при этом лишь вне рабочей области перемещения ПДГ 4 вне апертуры акустического контрольно-измерительного канала (9 4 10). Кроме того, отметим, что при размещении входного 5 и выходного 6 преобразователей со стороны одной рабочей торцовой грани 7 (см. фиг. 1, а) противолежащую ей грань 8 целесообразно выполнять непараллельной первой и снабдить ее звукопоглощающим покрытием 27 для уменьшения уровня ложных сигналов (УЛС). Отметим также, что конкретная схемотехника блока 21 может отличаться от изображенной на фиг. 1, а, б (в частности, элемент сравнения 21' может быть выполнен встроенным в схему амплитудно-фазового детектора 21"). Наконец, отметим, что спектр приемлемых материалов для реализации иммерсионных слоев 11 и 12 весьма разнообразен, хотя на практике в большинстве случаев используются, как правило, эпоксидные смолы (без отвердителей). Дополнительно отметим, что цепь обратной связи может содержать также усиленные элементы (на фиг. 1, а, б не показаны), служащие для уменьшения погрешности регулирования.
Регулируемое акустоэлектроннное устройство работает следующим образом.
При подаче входного радиочастотного сигнала (информационного) на электрическую клемму 25 входного преобразователя 5 последний возбуждает объемные акустические волны (продольные L или сдвиговые S в зависимости от типа преобразователя 5), распространяющиеся в звукопроводе 1 в направлении ПДГ 4. По достижении ПДГ 4, ОАВ взаимодействует с ней: частично отражаются от ПДГ и частично преломляются на ней, а также частично преобразуют свой модовый состав, т. е. волны L-моды преобразуются в волны S-моды или наоборот. Провзаимодействовавшие с ПДГ 4 ОАВ распространяются далее в направлении выходного преобразователя 6, на котором они преобразуются в электрический радиочастотный выходной информационный сигнал, снимаемый с электрической клеммы 26 выходного преобразователя 6. При этом выходной электрический сигнал оказывается задержанным относительно входного на время, определяемое длиной акустического информационного канала (преобразователь 5 ПДГ 4 - преобразователь 6) и скоростями распространения ОАВ в нем (с учетом возможного их различия на различных участках этого акустического канала). Так, в частности, в конструктивном варианте устройства, изображенном на фиг. 1, а, формирование выходного сигнала осуществляется с использованием эффекта отражения излученных преобразователем 5 ОАВ от ПДГ 4, а в конструктивном варианте устройства, изображенном на фиг. 1, б, с использованием эффекта прохождения ОАВ через ПДГ с преобразованием мод колебаний на ней.
Поскольку известно [3] что наиболее эффективное (в энергетическом смысле) отражение ОАВ от ПДГ при нормальном падении их на ПДГ для сдвиговых (S) ОАВ, а также для ОАВ, отраженных от ПДГ с преобразованием мод колебаний (L в S или S в L), то в первом конструктивном варианте устройства (фиг. 1, а) преобразователи 5 и 6 либо оба сдвиговой моды колебаний S (с плоскостью смещений, параллельной Z-граням звукопровода 1), либо один из преобразователей 5, 6 сдвиговой моды колебаний S, а другой продольной моды колебаний L. Временная задержка t выходного сигнала относительно входного для двух указанных случаев определяется соотношениями, соответственно:
t=(x1+x2)/vS и t=(x1/vL+x2/vS) или t=(x1/vS+x2/vL), (1)
где vS и vL скорости ОАВ S- и L-мод колебаний, соответственно;
x1 и x2 расстояния от ПДГ от входного и от ПДГ до выходного преобразователей, соответственно.
Учитывая, что для данного конструктивного варианта устройства (см. фиг. 1, а) x1 ≃ x2, соотношения (1) преобразуются к виду:
t=2x1/vS и t=x1(1//vL+1/vS) (1*)
Во втором конструктивном варианте устройства (см. фиг. 1, б) один преобразователь (5 или 6) сдвиговой моды колебаний, а другой продольной, поэтому временная задержка t выходного информационного сигнала относительно входного определяется соотношениями:
t=(x1/VL+x2/VS) и t=(x1/VL+x2/VS) или t=(x2/vL+x1/vS), (2)
где все обозначения идентичны оговоренным выше с тем лишь добавлением, что теперь (фиг. 1, б) величины х1 и х2 связаны между собой соотношением: х1+х2= l, где l длина звукопровода 1. С учетом этого, соотношения (2) преобразуются к виду:
t=l/vS+x1(1//vL+1/vS) или t=l/vL+x1(1//vS+1/vL) (2*)
В соотношениях (1*) и (2*) величины l, vS и vL являются фиксированными для выбранных размеров звукопровода, его материала и направления распространения ОАВ в нем. Таким образом, временная задержка t выходного информационного сигнала относительно входного в заявляемом устройстве оказывается однозначно связанной с местоположением ПДГ 4 в звукопроводе, определяемом, в частности, расстояние х1 от входного преобразователя 5 до ПДГ 4 вдоль акустического информационного канала.
При наличии на выходных клеммах 17 и 18 регулируемого источника 19, а следовательно, и на управляющих электродах 15 и 16 постоянного электрического напряжения, создающего в области звукопровода 1 под электродами 15, 16 электрическое поле Е, превышающее по величине соответствующее коэрцетивное значение Е0, в силу сегнетоэлектрических свойств материала звукопровода 1 имеет место его периполяризация, которая, благодаря сегнетоэластической природе материала звукопровода 1, осуществляется путем бокового смещения ПДГ 4 по звукопроводу 1. Это в зависимости от знака приложенного к электродам 15, 16 электрического напряженияприводит к увеличению или уменьшению расстояния х1 между входным преобразователем 5 и ПДГ 4 на величину Δx1 и, как следствие, к соответствующему изменению Δt величины временной задержки t в устройстве:

Как следует из соотношений (1**) и (2**), для первого конструктивного варианта устройства (фиг. 1, а) диапазон регулирования Δt определяемый величиной Δx1 ограничен сверху лишь длиной звукопровода и может в несколько раз превышать номинальное значение временной задержки, т. е. может достигать сотен процентов. Для второго конструктивного варианта устройства (фиг. 1, б) из соотношений (1**) и (2**) следует, что максимально возможный диапазон регулирования Δtmax ограничен относительной величиной разности скоростей VL и VS ОАВ (VL-VS)/VL,S, которая для кристаллов, изоморфных молибдату гадолиния, составляет ≃14% в связи с чем максимальный реально достижимый диапазон регулирования составляет (10-12)% Отметим, что конкретная величина диапазона регулирования в заявляемом устройстве формируется соответствующим выбором размеров рабочей области перемещения ПДГ 4, которая, в свою очередь, определяется протяженностью управляющих электродов 15, 16 в направлении информационного акустического канала.
Отработка заданной величины изменения временной задержки Δt* информационного сигнала в регулируемом акустоэлектронном устройстве осуществляется и использованием цепи отрицательной обратной связи по изменению пространственного положения х ПДГ 4 в звукопроводе 1, однозначно связанному с соответствующими величинами Δx1 и Δx2 В частности:
Δx = Δx1= Δx2 для конструктивного варианта на фиг. 1, а (3)
Δx = Δx1= l-Δx2 для конструктивного варианта на фиг. 1, б (4)
Цепь обратной связи образована контрольно-измерительной схемой (24, 23, 9, 10, 22, 21, 20, 19, 18), в которой генератор 24 опорного синусоидального сигнала фиксированной частоты вместе с акустическим контрольно-измерительным каналом (23, 9, 10, 22) играет роль датчика пространственного положения ПДГ 4 в рабочей области ее перемещения: устройство 21 формирования сигнала управления играет роль преобразователя сигнала с датчика (амплитудно-фазовый детектор 21") и элемента сравнения 21': регулируемый источник 19 постоянного электрического напряжения роль исполнительного органа. Описанная цепь обратной связи осуществляет автоматическую коррекцию величины и знака постоянного электрического напряжения на выходных клеммах 17, 18 источника 19, прикладываемого к управляющим электродам 15, 16, обеспечивающую реализацию необходимой величины Δx смещения ПДГ 4 для получения заданного значения временной задержки t информационного сигнала.
Характерной особенностью функционирования заявляемого устройства, обусловленной спецификой его конструкции (ее существенными отличиями) в сравнении с устройством прототипом, является реализация процесса выработки управляющего сигнала, поступающего на вход 20 регулируемого источника 19.
Осуществляется это следующим образом. Подсоединенный к генератору 24 опорного синусоидального сигнала фиксированной частоты входной пьезопреобразователь 9 возбуждает объемную акустическую волну (ОАВ), которая, пройдя через иммерсионный слой 11, распространяется по звукопроводу 1 во всей рабочей области перемещения ПДГ 4 в направлении, параллельном плоскости последней. Пройдя звукопровод 1 и миновав второй иммерсионный слой 12, это ОАВ преобразуется выходным пьезопреобразователем 10 в электрический сигнал, выделяемый на клемме 22. Этот сигнал несет информацию о положении ПДГ 4 в рабочей области ее перемещения. Действительно, амплитуда А1 его оказывается параболлической функцией координаты х положения ПДГ 4 в рабочей области ее перемещения по звукопроводу 1, ограниченной координатами начала хн и конца хк этой области, причем минимальное значение А1 имеет место при координате х0 ПЛГ 4, соответствующей середине указанной рабочей области ее перемещения (см. фиг. 2, а пунктирная кривая). Приведенная на фиг. 2, а пунктирная кривая является типичной экспериментальной зависимостью А1 от х, характер которой отчасти поясняется фиг. 2, б, в, где схематично изображена геометрия контрольно-измерительного акустического канала устройства (преобразователь 9 иммерсионный слой 11 звукопровод 1 - иммерсионный слой 12 преобразователь 10) для двух различных координат х- и х+ ПДГ 4. Фиг. 2, б, в иллюстрируют тот известный факт, что различие знаков спонтанной деформации соседних доменов 2 и 3 сегнетоэластического материала звукопровода 1 являются причиной специфической макродеформации звукопровода 1, форма которой однозначно определяется местоположением ПДГ 4, разделяющей соседние домены 2 и 3. Именно по этой причине акустический контакт преобразователей 9 и 10 со звукопроводом 1 выполнены с использованием иммерсионных слоев 11 и 12, которые с одной стороны обеспечивают сопровождаемое макродеформацией звукопровода 1 беспрепятственное перемещение ПДГ 4 по нему, а с другой обеспечивают возможность надежного акустического контакта преобразователей 9, 10 со звукопроводом 1 при изменении формы макродеформации. При этом в качестве преобразователей 9, 10 использованы преобразователи ОАВ продольной моды колебаний, так как именно эта мода ОАВ может распространяться и в жидкости (иммерсионные слои). Как следует из фиг. 2, б, в, наихудшие условия акустического согласования преобразователей 9, 10 со звукопроводом 1 имеют место при размещении ПДГ 4 в центре (координата х0) ее рабочей области перемещения (хк хн), чему и соответствует минимум пунктирной кривой на фиг. 2, а. Следует отметить, что благодаря выполнению пьезопреобразователя 9 двухсекционным с акустически противофазными секциями (91, 92) и ( ) электрический выходной сигнал контрольно-измерительного канала, выделяемый на клемме 22, характеризуется кроме амплитудной модуляции в функции пространственного положения ПДГ 4 в рабочей области ее перемещения (см. фиг. 2, а пунктирная кривая) еще и противоположностью фазы (фазовой манипуляцией) для координат пространственного положения ПДГ 4 х≤ х0 и х ≥ х0, т. е. слева и справа от координаты х0 центра рабочей области перемещения ПДГ 4 (см. фиг. 2, а, б, в). В результате детектирования такого сигнала амплитудно-фазовым детектором (АФД) 21" на выходе последнего имеет место постоянное электрическое напряжение, величина А2 и знак которого однозначно связаны с координатой х пространственного положения ПДГ 4 в рабочей области ее перемещения (см. фиг.2, а сплошная кривая). Благодаря выбору одинаковой апертуры двух акустических противофазных секций (91, 92) и (
) электрический выходной сигнал контрольно-измерительного канала, выделяемый на клемме 22, характеризуется кроме амплитудной модуляции в функции пространственного положения ПДГ 4 в рабочей области ее перемещения (см. фиг. 2, а пунктирная кривая) еще и противоположностью фазы (фазовой манипуляцией) для координат пространственного положения ПДГ 4 х≤ х0 и х ≥ х0, т. е. слева и справа от координаты х0 центра рабочей области перемещения ПДГ 4 (см. фиг. 2, а, б, в). В результате детектирования такого сигнала амплитудно-фазовым детектором (АФД) 21" на выходе последнего имеет место постоянное электрическое напряжение, величина А2 и знак которого однозначно связаны с координатой х пространственного положения ПДГ 4 в рабочей области ее перемещения (см. фиг.2, а сплошная кривая). Благодаря выбору одинаковой апертуры двух акустических противофазных секций (91, 92) и ( ) преобразователя 9 электрический сигнал на выходе 20 АФД 21" для координаты х х0 ПДГ 4 оказывается равным нулю и отличается знаком для областей координат ПДГ 4 x <х0 n x > х0. В результате, сигнал на выходе АФД 21" оказывается симметризированным по амплитуде и противоположным по знаку для координат ПДГ 4, равноудаленных от координаты х0 центра рабочей области ее перемещения, что гарантирует воспроизводимость регулировочной характеристики устройства в целом. Последующее сравнение этого сигнала с уставкой, осуществляемое элементом сравнения 21', определяет на выходе 20 блока 21 необходимые величину и знак управляющего сигнала для регулируемого источника 19, постоянное электрическое напряжение соответствующей полярности с выходных клемм 17, 18 которого подается на управляющие электроды 15, 16 и обеспечивает требуемое смещение ПДГ 4 для реализации заданной величины временной задержки информационного сигнала устройства (см. фиг. 1, а, б).
) преобразователя 9 электрический сигнал на выходе 20 АФД 21" для координаты х х0 ПДГ 4 оказывается равным нулю и отличается знаком для областей координат ПДГ 4 x <х0 n x > х0. В результате, сигнал на выходе АФД 21" оказывается симметризированным по амплитуде и противоположным по знаку для координат ПДГ 4, равноудаленных от координаты х0 центра рабочей области ее перемещения, что гарантирует воспроизводимость регулировочной характеристики устройства в целом. Последующее сравнение этого сигнала с уставкой, осуществляемое элементом сравнения 21', определяет на выходе 20 блока 21 необходимые величину и знак управляющего сигнала для регулируемого источника 19, постоянное электрическое напряжение соответствующей полярности с выходных клемм 17, 18 которого подается на управляющие электроды 15, 16 и обеспечивает требуемое смещение ПДГ 4 для реализации заданной величины временной задержки информационного сигнала устройства (см. фиг. 1, а, б).
Благодаря описанному выполнению датчика пространственного положения ПДГ 4 в звукопроводе 1 (24, 23, 9, 11, 1, 12, 10, 22) обеспечивается возможность измерения местоположения ПДГ 4 во всем максимально достижимом диапазоне ее перемещения, ограниченном только размерами звукопровода, и как следствие, во всем максимально достижимом диапазоне регулирования информативного параметра информационного сигнала устройства. Высокая же точность регулирования величины информативного параметра гарантируется, как и в устройстве-прототипе, использованием цепи отрицательной обратной связи по местоположению ПДГ 4 в звукопроводе 1. При этом, благодаря описанному выполнению блока 21 формирования сигнала управления обеспечивается однозначность и воспроизводимость регулировочной характеристики устройства во всем широком диапазоне регулирования его информативного параметра, достигающем, как отмечалось выше, десятков и сотен процентов.
Итак, в заявляемом регулируемом акустоэлектронном устройстве благодаря описанному выполнению контрольно-измерительного канала, в том числе датчика пространственного положения ПДГ в звукопроводе и устройства формирования сигнала управления, обеспечивается возможность высокоточного регулирования временной задержки информационного сигнала (за счет использования цепи отрицательной обратной связи по местоположению ПДГ) в существенно расширенном диапазоне регулирования, достигающем десятков и сотен процентов. В реализованных на практике лабораторных макетах заявляемого регулируемого акустоэлектронного устройства (в частности, РУЛЗ ОАВ), построенных по схемам фиг. 1,а и 1,б, были достигнуты диапазоны перестройки времени задержки 200% и 12% соответственно с обеспечением точности регулирования 0,1%
Источники информации:
1. Алексеев А.Н.// Известия АН СССР. Серия физическая. 1989, т. 53, N7, с.1424-1433.
2. Applied Physics Letters; vol. 30, N10, 15.05.77, p.506-508, прототип.
3. Алексеев А. Н. Злоказов М.В. Осипов И.В.//Известия АН СССР. Серия физическая. 1982, т. 47, N3, с.465-475.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛИРУЕМОЕ АКУСТОЭЛЕКТРОННОЕ УСТРОЙСТВО | 1994 |
|
RU2101853C1 |
| Регулируемая ультразвуковая линия задержки на поверхностных акустических волнах | 1990 |
|
SU1818681A1 |
| РЕГУЛИРУЕМЫЙ АКУСТОЭЛЕКТРОННЫЙ ФАЗОВРАЩАТЕЛЬ | 1989 |
|
SU1731022A2 |
| РЕГУЛИРУЕМАЯ УЛЬТРАЗВУКОВАЯ ЛИНИЯ ЗАДЕРЖКИ | 1986 |
|
SU1459592A1 |
| Регулируемая ультразвуковая линия задержки на поверхностных акустических волнах | 1990 |
|
SU1780145A1 |
| РЕГУЛИРУЕМЫЙ АКУСТОЭЛЕКТРОННЫЙ ФАЗОВРАЩАТЕЛЬ | 1989 |
|
SU1753917A1 |
| Регулируемое акустоэлектронное устройство | 1990 |
|
SU1820478A1 |
| РЕГУЛИРУЕМЫЙ АКУСТОЭЛЕКТРОННЫЙ ФАЗОВРАЩАТЕЛЬ | 1987 |
|
SU1517716A1 |
| Регулируемое акустоэлектронное устройство | 1990 |
|
SU1820479A1 |
| Регулируемый акустический аттенюатор | 1982 |
|
SU1064425A1 |
Изобретение относится к области радиоэлектроники, в частности акустики, и может быть использовано в качестве регулируемого акустоэлектронного устройства временной или фазовой селекции сигналов, например, в качестве регулируемой ультразвуковой линии задержки (РУЛЗ), в различных радиоэлектрических системах обработки сигнальной информации. Технический результат, на достижение которого направлено изобретение, заключается в обеспечении высокой точности регулирования величины информативного параметра в широком диапазоне его регулирования, в частности, для РУЛЗ - в диапазоне регулирования величины времени задержки до десятков и сотен процентов от ее номинального значения с точностью регулирования, определяемой использованием отрицательной обратной связи в цепи управления. Достижение этого технического результата обеспечивается тем, что в регулируемом акустоэлектронном устройстве, выполненном на основе звукопровода из полидоменного монокристалла сегнетоэластика-сегнетоэлектрика, изоморфного молибдату гадолиния, с электрически регулируемым пространственным положением плоской доменной границы (ПДГ) и содержащем информационный акустический канал, а также контрольно-измерительный акустический канал, включенный в цепь отрицательной обратной связи по пространственному положению ПДГ. Согласно изобретению в качестве преобразователей объемных акустических волн (ОАВ) контрольно-измерительного акустического канала использованы пьезоэлектрические преобразователи продольной моды колебаний, расположенные со стороны торцовых граней звукопровода, перпендикулярных плоскости ПДГ, и размещенные в рабочей области перемещения ПДГ с полным ее перекрытием, при этом один из указанных преобразователей ОАВ выполнен двухсекционным с акустически противофазными секциями одинаковой апертуры, акустический контакт каждого из преобразователей контрольно-измерительного канала выполнен с использованием иммерсионного слоя, а в качестве блока формирования сигнала управления использован амплитудно-фазовый детектор с элементом сравнения с установкой. Благодаря такому выполнению контрольно-измерительного канала, в том числе датчика пространственного положения ПДГ в звукопроводе и устройства формирования сигнала управления, высокоточное регулирование величины времени задержки в РУЛЗ, гарантируемое использованием цепи отрицательной обратной связи по местоположению ПДГ в звукопроводе, обеспечивается в существенно расширенном диапазоне регулирования, достигающем десятков и сотен процентов от номинальной величины времени задержки. 2 ил.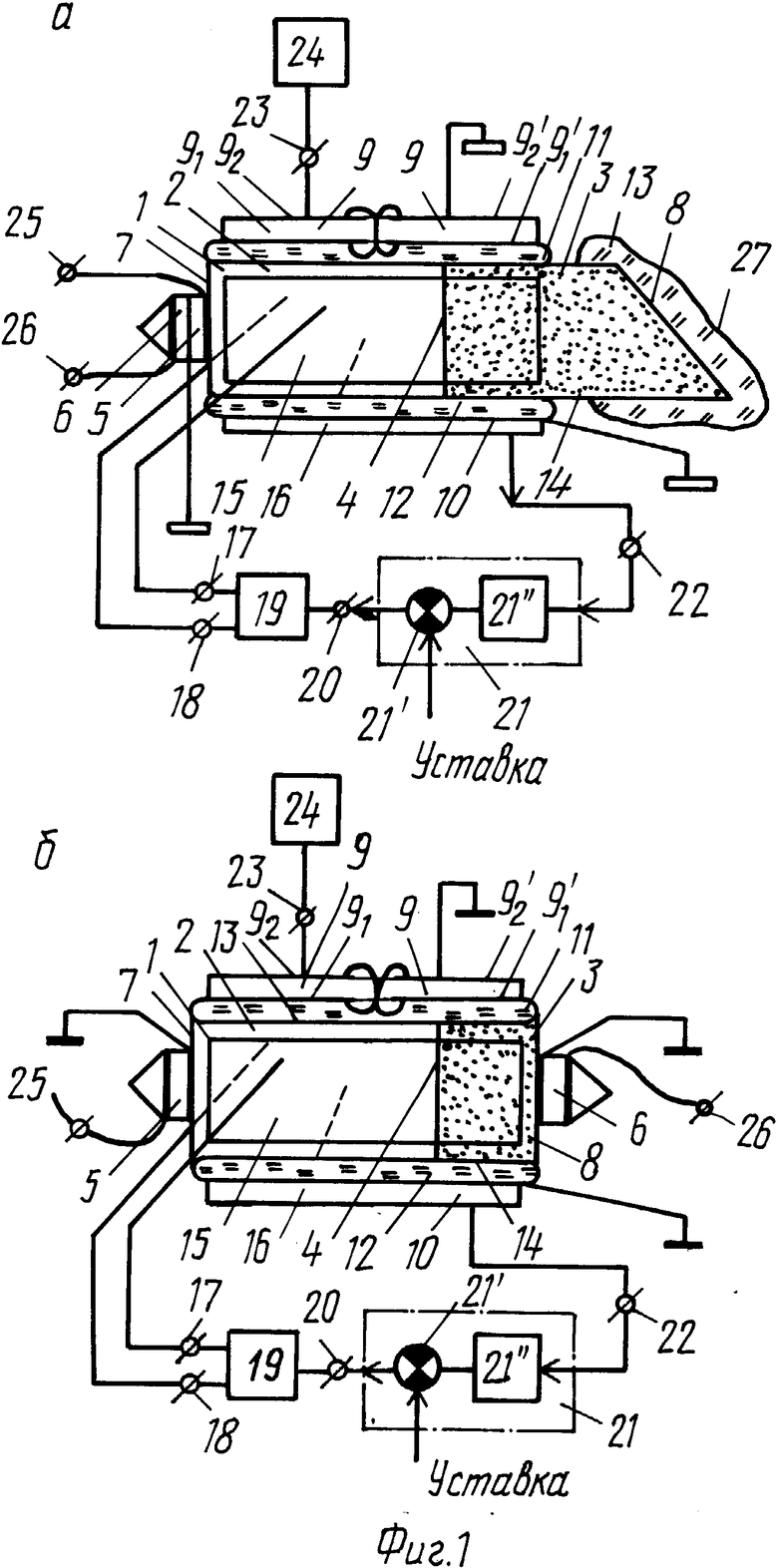
Регулируемое акустоэлектронное устройство, содержащее пьезоэлектрический звукопровод, выполненный из полидоменного монокристалла сегнетоэластика-сегнетоэлектрика, изоморфного молибдату гадолиния, в виде пластины Z-среза, содержащий по крайней мере два разнополярных домена, разделенных плоской доменной границей, основные входной и выходной преобразователи объемных акустических волн, находящиеся в акустическом контакте со звукопроводом и расположенные на его одной или двух противолежащих рабочих торцовых гранях, перпендикулярных Z-граням звукопровода, и образующие вместе с плоской доменной границей информационный акустический канал, управляющие электроды, расположенные на двух противолежащих Z-гранях звукопровода в рабочей области перемещения плоской доменной границы и подсоединенные к выходу регулируемого источника постоянного электрического напряжения, отличающееся тем, что в него введены дополнительные входной и выходной преобразователи объемных акустических волн, также находящиеся в акустическом контакте со звукопроводом, размещенные в рабочей области перемещения плоской доменной границы с полным ее перекрытием со стороны двух противолежащих торцовых граней звукопровода, ортогональных указанным выше Z-граням и рабочим торцовым граням и образующие контрольно-измерительный акустический канал, генератор синусоидального сигнала, выход которого соединен с входным дополнительным преобразователем объемных акустических волн, и блок формирования сигнала управления, включенный между входом регулируемого источника постоянного электрического напряжения и выходным дополнительным преобразователем объемных акустических волн, при этом в качестве преобразователей объемных акустических волн контрольно-измерительного акустического канала использованы пьезоэлектрические преобразователи объемных акустических волн продольной моды колебаний, входной из них выполнен двухсекционным с акустически противофазными секциями одинаковой апертуры, причем акустический контакт этих преобразователей со звукопроводом выполнен с использованием иммерсионного слоя, а в качестве блока формирования сигнала управления использован амплитудно-фазовый детектор с элементом сравнения с уставкой.
| Applied Physics Letters, v | |||
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| Способ получения бумажной массы из стеблей хлопчатника | 1912 |
|
SU506A1 |
