Изобретение относится к способам и устройствам определения динамической массы и средней силы трения, в частности, двери лифта.
Из патента Швейцарии N 399775 известны способ и устройство измерения момента вращения нагрузки в электроприводах, в особенности приводах транспортеров. Способ заключается в том, что в определенный момент времени, отведенный для измерения, в двигателе привода создают момент вращения, равный нулю, и измеряют в приводном двигателе, по меньшей мере кратковременно, ускорение или замедление, которые в этом случае прямо являются мерой воздействующего на двигатель момента нагрузки, который и измеряют. Для определения ускорения или замедления определяют в начале и конце интервала измерения скорость приводного двигателя, оба результата измерения заносят в устройство памяти и отображают на индикаторе разность этих величин. Этот способ по существу состоит в том, что электрический привод на одном участке "хода обучения" на измерительном участке идет без привода и при этом измеряют его замедление или ускорение.
Устройство для осуществления способа по изобретению состоит из комбинации отключателя момента вращения двигателя в виде контактора для прерывания питания двигателя, тогда как измерителем ускорения или замедления является связанный с двигателем датчик импульсов, выдающий пропорциональную скорости вращения частоту импульсов.
Принципиальный недостаток этого способа заключается в том, что момент нагрузки определяется не абсолютно, а лишь с точностью до постоянного коэффициента пропорциональности. Указанный выше ход движения по испытательному участку может быть описан лишь уравнением вида K = mda, где изморенное ускорение а является известной величиной, а сила K и динамическая масса md являются неизвестными. Для абсолютного определения обоих неизвестных K и md, требуется второе независимое уравнение из второго пробного прохода.
Однако документ не указывает никакой возможности сделать такие два пробных измерения независимыми, чтобы соответствующие два уравнения также были независимыми и могли бы быть разрешены относительно двух неизвестных K и md. При этом неудачным оказалось также то, что изморенное ускорение или замедление представляет лишь "меру" для искомого, воздействующего на двигатель, момента нагрузки и поэтому он может быть определен лишь неточно. Его применению, например для управления моментом включения торможения или тормозным моментом, поэтому ограничиваются его неточностью. Это особенно справедливо для лифтов легкой конструкции, так как в этом случае служащая постоянной пропорциональности динамическая масса md в большей степени зависит от подлежащего подъему груза, и поэтому является не только неизвестной, но и быстро меняющейся величиной.
Далее недостатком фундаментального рода является то, что имеющаяся в электроприводе сила трения, является частью определяемого момента нагрузки и не может быть определена отдельно, что делает невозможным численное определение фактических условий по трению и значит его контроль для профилактического обслуживания, а также их сравнение для обеспечения качества.
Технический результат изобретения - определение динамической массы и средней силы трения двери лифта, а также устройства для осуществления этого способа, заключается в повышении их эффективности путем обеспечения возможности определять при раздвижных дверях лифтов динамическую массу и среднюю силу трения двери лифта расчетным методом в любой момент при нормальной эксплуатации лифта и без применения специальных дополнительных измерительных устройств.
Для достижения технического результата в способе определения динамической массы и средней силы трения двери лифта, при котором систему раздвижных дверей подвергают по меньшей мере одному, имеющему проходимый без привода испытательный участок процессу движения, и по заморенным кинематическим параметрам рассчитывают с помощью микропроцессора, по меньшей мере один дополнительна параметр системы раздвижных дверей, систему раздвижных дверей подвергают учебному проходу открывания или учебному проходу закрывания, причем в начале и в конце первого или второго испытательных участков измеряют скорость створки и пройденный путь, изморенные значения запоминают в памяти микропроцессора и с учетом изморенных значений для учебных проходов открывания и закрывания выводят балансы энергий ЕВ 1 и ЕВ 2 системы раздвижных дверей путем сложения значений кинетической энергии Eк′ энергии трения Er и потенциальной энергии Ep системы раздвижных дверей, и по ним рассчитывают динамическую массу и среднюю силу трения.
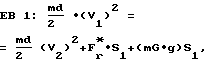
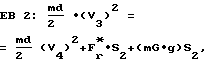
При этом балансы энергии ЕВ 1 и ЕВ 2 системы раздвижных дверей выводят по следующим соотношениям: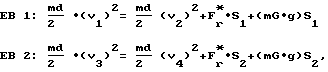
где md - динамическая масса системы раздвижных дверей, кг;
V1 - положительная скорость створки двери в начале первого испытательного участка, м/с;
V2 - положительная скорость створки двери в конце первого испытательного участка, м/c;
S1 - длина первого испытательного участка, м;
F
mG - масса закрывающего груза, кг;
g - ускорение земного притяжения, м/с2;
V3 - отрицательная скорость створки двери в начале второго испытательного участка, м/c;
V4 - отрицательная скорость створки двери в конце второго испытательного участка, м/с;
S2 - длина второго испытательного участка, м.
Динамическую массу и среднюю силу трения рассчитывают по следующим специальным формулам: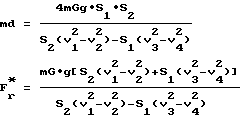
Для повышения точности способа массу части троса между закрывающим грузом и шкивом добавляют к массе закрывающего груза и для расчета массы троса учитывают среднюю длину троса
l* = (l1 + l2) : 2,
где l1 - длина в м части троса между закрывающим грузом и шкивом в начале первого и второго испытательных участков;
l2 - длина в м троса между закрывающим грузом и шкивом в конце первого и второго испытательных участков.
Кроме того, для повышения точности способа массу закрывающего груза задают с учетом максимального трения сцепления (Fhmax) следующим образом:
mG•g = 2•Fhmax [н].
Для устранения влияния ошибок за счет зависимости силы трения Fr от положения двери первый и второй испытательные участки располагают на одном и том же участке пути ходовой рельсы, а для устранения ошибок за счет зависимости силы трения Fr от скорости, скорости V1, V2 и V3, V4 для первого и второго испытательных участков выбирают из следующего соотношения V3 = (V1 + V2) : 2 = V4.
Из динамической массы раздвижной двери лифта определяют ее максимальную скорость закрывания  следующим образом:
следующим образом: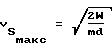 ,
,
где W - максимально допустимая из соображения безопасности энергия в нм закрывания системы раздвижных дверей.
Кроме того, для достижения указанного технического результата в устройстве определения динамической массы и средней силы трения двери лифта, содержащем приводной двигатель, соединенный посредством средств передачи и сцепления с кабинной и шахтной дверьми лифта, блок управления и регулирования движения дверей лифта, включающий микропроцессор, соединенный с одной стороны электрически с датчиком приращений для генерирования импульсов частотой повторения, пропорциональной скорости подвижного приводного двигателя, а с другой - с источником питания приводного двигателя, микропроцессор снабжен датчиком положения створки двери двумя запоминающими блоками и соединен с датчиком приращений через интерфейс, передающий информацию в обоих направлениях, при этом первый запоминающий блок выполнен с возможностью запоминания скорости створки, соответствующей каждому элементу приращения пути, а второй запоминающий блок выполнен с возможностью запоминания кинематических параметров первого и второго испытательных участков.
В соответствии с предлагаемым способом можно определить для любой скорости закрывания дверей лифта соответствующую кинетическую энергию, которая освобождается в случае зажимания пассажира в дверях. При этом возможно также обратное определение допустимой с точки зрения безопасности максимальной энергии закрывания и настроить соответственно привод закрывания дверей. В общем случае способ пригоден для числового определения параметров системы, которые, например, важны для оптимизации или профилактического ухода и обслуживания инерционной системы.
Автоматические раздвижные двери, как они, например, используются в мощных лифтах, должны соответствовать различным предписаниям. Так, например, из соображений защиты от защемления дверью максимальная кинетическая энергия механически соединенных между собой частей двери со средней скоростью закрывания не должна превышать заданной максимальной величины (например, 10 Дж). Это ставит верхнюю границу для средней скорости закрывания. С другой стороны, быстрое закрывание и короткое затрачиваемое на это время является предпосылкой высокой транспортной производительности, поэтому приходится, сохраняя защиту от защемления, полностью использовать достигаемую максимальную скорость закрывания и поэтому необходимо знать допустимую максимальную скорость закрывания.
В автоматических раздвижных дверях максимальная скорость закрывания Vmax определяется максимальной допустимой кине- тической энергией  динамической массой двери md. Формула такова: Vmax =
динамической массой двери md. Формула такова: Vmax =  .
.
Так как  задана предписаниями безопасности, расчет Vмакс сводится к тому, чтобы определить динамическую массу двери md. В нее входят все подвижные связанные друг с другом массы дверной системы и отнесены к поступательному движению защищаемой от защемления створки двери. К этому относятся все створки двери, элементы связи их и захваты, подвижные устройства контроля дверей, закрывающие грузы, кабельные соединения на створки, передачи и редуктора в системе привода и т.д. Сюда входят и поля телескопически закрывающихся дверей, которые двигаются с половинной скоростью - четвертью их статической массы - в динамическую массу.
задана предписаниями безопасности, расчет Vмакс сводится к тому, чтобы определить динамическую массу двери md. В нее входят все подвижные связанные друг с другом массы дверной системы и отнесены к поступательному движению защищаемой от защемления створки двери. К этому относятся все створки двери, элементы связи их и захваты, подвижные устройства контроля дверей, закрывающие грузы, кабельные соединения на створки, передачи и редуктора в системе привода и т.д. Сюда входят и поля телескопически закрывающихся дверей, которые двигаются с половинной скоростью - четвертью их статической массы - в динамическую массу.
Таким образом, имеется потребность в простом и точном способе определения динамической массы md дверей лифта.
Предлагаемые способ и устройство имеют различные преимущества, в особенности для инерционных систем, являющихся частью большой установки.
Первое преимущество образуется в результате того, что при экспериментальном определении параметров двери, двери лифта, полностью готовые к работе, установлены в их естественном окружении и что используемые при этом учебные проходы лишь незначительно отличаются от обычного движения при открывании и закрывании. Для отдельных параметров дверей определяются поэтому те величины, которые имеют место в дверях лифта при их нормальной работе.
Далее преимуществом является то, что способ реализуется при использовании уже имеющихся приводов открывания дверей. При этом не требуется специальных устройств, которые могут быть источником дефектов и ошибок, просто привод двери используется для новой цели, для которой он вначале не предусматривался. Добавочным является лишь соответствующий способу алгоритм, который легко ввести в существующую микропроцессорную систему привода дверей. Оказалось также, что способ по изобретению может быть легко интегрирован через шину сбора данных в существующие системы управления лифтом. Способ отлично годится для последующей доработки обычных приводов дверей с целью повышения безопасности и для того, чтобы сделать их надежными и удобными. Еще одно преимущество заключается в том, что способ годиться для того, чтобы своевременно воспринимать физические характеристики, статически их оценивать и протоколировать и использовать это как команду прерывания в компьютере более высокого ранга управления лифтом. Кроме того, такая статистика годится для профилактики и обеспечения качества, а также служит доказательством надежности для инспекторов.
Изобретение подробнее поясняется чертежами, иллюстрирующими применение при определении динамической массы и средней силы трения раздвижных дверей лифта, но предлагаемый в описании способ имеет общую применимость, т. е. когда дело касается измерения параметров связанных движущихся массивных частей, причем числовым методом.
На фиг. 1 схематично показано расположение и принципиальное построение системы раздвижных дверей 1 для кабин лифтов для применения способа по изобретению для численного определения динамической массы md средней силы трения F
В примере на фиг. 1 система измерения, определяющая физические параметры процесса представлена автоматической системой раздвижных дверей 1 для кабины лифта, которая в основном выполнена давно известным образом, т. е. для каждой кабины предусмотрен привод раздвигания дверей, который постоянно связан с соответствующими створками кабины @с раздвижными створками двери шахты лифта через муфту сцепления, причем далее для упрощения представлена лишь одна из обеих створок двери.
Изобретение относится лишь к способу и соответствующему устройству для определения динамической массы Mд и средней силы трения E
Микропроцессор содержит датчик 13 положения и соединен с датчиком приращений 3.2 посредством интерфейса 14. Кроме того, микропроцессор (3.1) имеет устройство памяти пути и скорости SP1 для запоминания скорости створки, соответствующей каждому элементу приращения пути, а также запоминающее устройство параметров SP2 для запоминания кинематических параметров испытательных участков.
Датчик приращений 3.2 может быть закреплен на дверном двигателе 3.3 или в любом другом месте в пределах привода двери 3. Решающее значение для способа по изобретению имеет аварийная система закрывания 4. Система содержит груз G с массой МG, который через подвеску груза, состоящую из части с грузом 4.1 и шкива 4.2, свободно висит соединенный с точкой крепления 4.3 в шахте лифта. За счет такого устройства действует закрывающая сила FS, которая с величиной MG через шкив воздействует на створку двери 2. Эта закрывающая сипа FS действует на створку двери 2 в любом ее положении с постоянной величиной в сторону закрывания и в случае аварии должна закрыть дверь 2. Такие аварийные системы закрывания 4 требуются действующими предписаниями техники безопасности, чтобы двери шахты также в случае аварии всегда были закрыты, защищая людей от падения. Раздвижные двери поэтому оборудованы грузами G. Чтобы обеспечивалась работа аварийной системы 4 при всех уровнях трения, закрывающая сила FS должна быть больше максимальной, возникающей во всех условиях силы трения двери 2 и в неподвижном состоянии Frмакс. При нормальной работе створка двери 2 открывается горизонтальным ее перемещением посредством привода двери 3, причем, сила аварийной системы FS противодействует открыванию, а при закрывании она добавляется к силе привода.
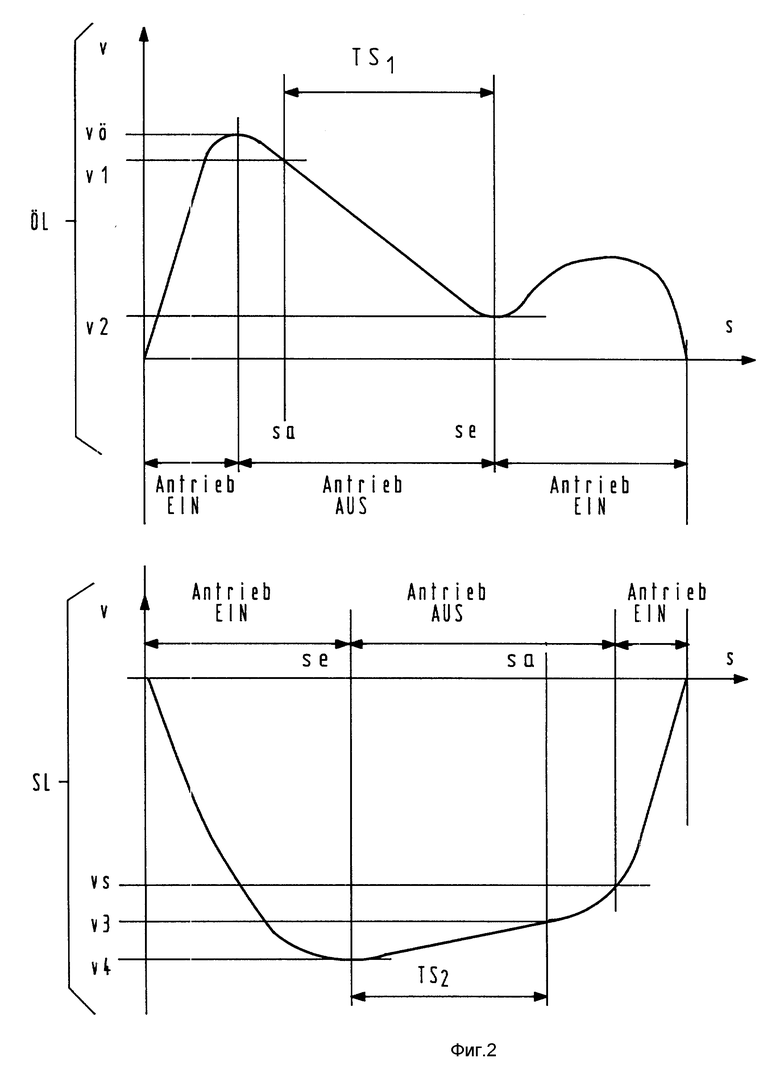
На фиг. 2 показан процесс открывания двери  и процесс закрывания двери SL в виде диаграммы, для использования системы для определения динамической массы Mд и средней силы трения F
и процесс закрывания двери SL в виде диаграммы, для использования системы для определения динамической массы Mд и средней силы трения F дверей 2 они из закрытого положения ускоряются до определенной скорости
дверей 2 они из закрытого положения ускоряются до определенной скорости  привод двери затем отключается и в точке пути Sa, в которой скорость движения V1 получается с током привода, равным нулю, входит в первый участок измерения TS1.
привод двери затем отключается и в точке пути Sa, в которой скорость движения V1 получается с током привода, равным нулю, входит в первый участок измерения TS1.
Этот участок измерения TS1 затем проходится с отключенным приводом двери 3, однако при торможении закрывающим грузом G, с уменьшавшейся скоростью и после прохождения участка TS1 при все еще положительной скорости створки двери V2, створка выходит с этого участка. Затем снова включается привод двери 3, чтобы полностью открыть створку 2. Цепью открывающего прохода  является параметрическая характеризация свободного, однако тормозимого закрывающим грузом G движения створки. Для этого скорости створки V1 и V2, а также величина пути SI воспринимается и без того имеющимся микропроцессором 3,1 привода дверей 3 с помощью имеющегося датчика приращений 3.2 и запоминаются для дальнейшего использования. Соответствующий учебный проход на закрывание SL изображен на диаграмме нижней части фиг. 2 так же, как зависимость скорости от пути. При этом створка двери 2 из открытого положения ускоряется до определенной скорости закрывания VS, привод двери 3 затем отключается и в точке пути S а при скорости створки V3 с током двигателя, равным нулю, входит на измерительный участок ТS2. Этот измерительный участок TS2 проходится при отключенном приводе 3, но с ускорением от закрывающего груза G или с постоянной скоростью и после прохождения измерительного участка длиной S2, створка выходит из него со все еще отрицательной скоростью V4. После этого вновь включается привод 3, чтобы полностью закрыть дверь 2. Целью этого учебного прохода на закрывание SL также является параметрическая характеристика свободного, однако, под воздействием закрывающего груза G, закрывания двери. В этом случав фиксируются скорости V3 и V4 и путь S2 и без того имеющимся микропроцессором 3.1 привода дверей 3 с помощью и без этого имеющегося датчика приращений 3.2 и занесение их в память для дальнейшего использования. Так как в данном случае применения исследуется раздвижная дверь 1, то все скорости и пути являются параметрами поступательного движения.
является параметрическая характеризация свободного, однако тормозимого закрывающим грузом G движения створки. Для этого скорости створки V1 и V2, а также величина пути SI воспринимается и без того имеющимся микропроцессором 3,1 привода дверей 3 с помощью имеющегося датчика приращений 3.2 и запоминаются для дальнейшего использования. Соответствующий учебный проход на закрывание SL изображен на диаграмме нижней части фиг. 2 так же, как зависимость скорости от пути. При этом створка двери 2 из открытого положения ускоряется до определенной скорости закрывания VS, привод двери 3 затем отключается и в точке пути S а при скорости створки V3 с током двигателя, равным нулю, входит на измерительный участок ТS2. Этот измерительный участок TS2 проходится при отключенном приводе 3, но с ускорением от закрывающего груза G или с постоянной скоростью и после прохождения измерительного участка длиной S2, створка выходит из него со все еще отрицательной скоростью V4. После этого вновь включается привод 3, чтобы полностью закрыть дверь 2. Целью этого учебного прохода на закрывание SL также является параметрическая характеристика свободного, однако, под воздействием закрывающего груза G, закрывания двери. В этом случав фиксируются скорости V3 и V4 и путь S2 и без того имеющимся микропроцессором 3.1 привода дверей 3 с помощью и без этого имеющегося датчика приращений 3.2 и занесение их в память для дальнейшего использования. Так как в данном случае применения исследуется раздвижная дверь 1, то все скорости и пути являются параметрами поступательного движения.
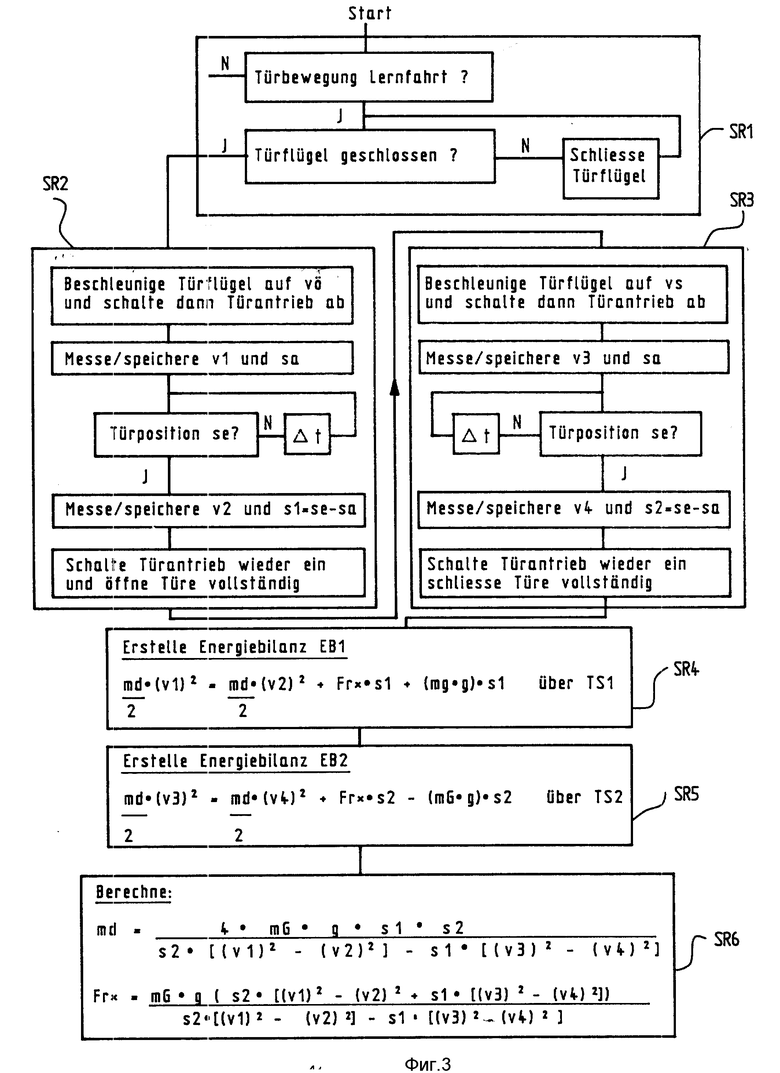
Предпочтительный вариант способа по изобретению, выбранный для иллюстрации, теперь подробно будет пояснен с помощью фиг. 3. Заложенные в микропроцессор алгоритмы схематически представлены в виде поточной диаграммы (блок-схемы программы).
Этот предпочтительный вариант исполнения отличается тем, что в инерциальной системе нужно определить физические параметры - в данном случае, системы закрывания дверей, при энергетической оценке участвует в процессе потенциальная энергия Eп закрывающего груза G, а также кинетическая энергия Eк и энергия трения Er всех частей установки, и что динамическая масса Mд и средняя сила трения E
На фиг. 3 способ по изобретению начинается первым шагом 1, которым определяется, что оба первые прохода двери будут учебными проходами, и что створка двери находится в закрытом положении. Первый учебный проход - это проход открывания  , как он представлен в последующем шаге 2. Для этого створка двери 2 из закрытого положения ускоряется до положительной скорости открывания
, как он представлен в последующем шаге 2. Для этого створка двери 2 из закрытого положения ускоряется до положительной скорости открывания  и привод двери 3 затем отключается. Скорость
и привод двери 3 затем отключается. Скорость 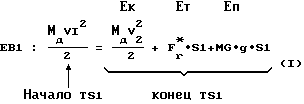 при этом выбирают такой, что с учетом трения и противодействия закрывающего груза С, создающего силу Fs измерительный участок TSI будет пройден до конца с уменьшающейся, но все еще положительной скоростью. После обнуления тока двигателя, скорость движения створки становится V1 и соответствующее положение створки дверей - S, а в начале испытательного участка TS1, они замеряются и закладываются в память. До положения створки Se в конце испытательного участка TS1 створка движется и пройденный путь SI = Se - Sa, а также скорость створки V2 в положении Se замеряют и запоминают. После этого снова включается привод двери 3, чтобы полностью их открыть. Для измерения и запоминания скоростей створки V1 и V2, а также длины пути S1 испытательного участка TSI служит микропроцрссор 3.1, а также датчик приращений 3.2 в приводе дверей 3. Таким образом, не требуется добавочных измерительных устройств, которые могут быть источником ошибок.
при этом выбирают такой, что с учетом трения и противодействия закрывающего груза С, создающего силу Fs измерительный участок TSI будет пройден до конца с уменьшающейся, но все еще положительной скоростью. После обнуления тока двигателя, скорость движения створки становится V1 и соответствующее положение створки дверей - S, а в начале испытательного участка TS1, они замеряются и закладываются в память. До положения створки Se в конце испытательного участка TS1 створка движется и пройденный путь SI = Se - Sa, а также скорость створки V2 в положении Se замеряют и запоминают. После этого снова включается привод двери 3, чтобы полностью их открыть. Для измерения и запоминания скоростей створки V1 и V2, а также длины пути S1 испытательного участка TSI служит микропроцрссор 3.1, а также датчик приращений 3.2 в приводе дверей 3. Таким образом, не требуется добавочных измерительных устройств, которые могут быть источником ошибок.
После проведенного учебного прохода на открывание 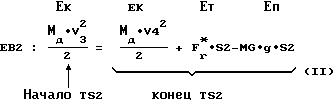 проводят в шаге 3 учебный проход на закрывание SL. При этом створка двери 2 из открытого положения ускоряется до отрицательной скорости закрывания VS и привод двери затем отключают. Скорость закрывания VS выбирают таким образом, что с учетом трения и сипы действия закрывающего груза испытательный участок TS2 проходится без привода до конца с отрицательной и в общем случае, меняющейся скоростью. После обнуления тока двигателя измеряется скорость створки V3 и соответствующее положение створки Sа в начале испытательного участка TS2, и обе величины закладываются в память, до положения створки Sе л конце испытательного участка TS2 движение продолжается, и пройденный путь S2 = Sе - Sа, а также соответствующая скорость створки V4 в положении Se замеряется и запоминается. После этого привод двери 3 снова включается, чтобы полностью закрыть дверь.
проводят в шаге 3 учебный проход на закрывание SL. При этом створка двери 2 из открытого положения ускоряется до отрицательной скорости закрывания VS и привод двери затем отключают. Скорость закрывания VS выбирают таким образом, что с учетом трения и сипы действия закрывающего груза испытательный участок TS2 проходится без привода до конца с отрицательной и в общем случае, меняющейся скоростью. После обнуления тока двигателя измеряется скорость створки V3 и соответствующее положение створки Sа в начале испытательного участка TS2, и обе величины закладываются в память, до положения створки Sе л конце испытательного участка TS2 движение продолжается, и пройденный путь S2 = Sе - Sа, а также соответствующая скорость створки V4 в положении Se замеряется и запоминается. После этого привод двери 3 снова включается, чтобы полностью закрыть дверь.
Снова скорости створки V3 и V4 в начале и конце испытательного участка TS2, а также его длина S2 определяются и запоминаются с помощью микропроцессора 3.1 и датчика приращений 3.2.
Последующие шаги 4 и 5 служат для того, чтобы составить баланс энергии EB1 и ЕВ2 для первого испытательного участка TS1 или для второго испытательного участка ТS2. При этом способ исходит от физических закономерностей, а именно от того, что полная энергия в энергетически замкнутой системе остается постоянной. Это справедливо в предлагаемом случае для прохода обоих испытательных участков TS1 и TS2, так как привод дверей 3 во время их прохода выключен и таким образом, система раздвижных дверей 1 в течение этого времени энергии не получает извне и не отдает. Изменение кинетической энергии, проявляющееся в изменении скорости створки двери 2, вызывается переходом кинетической энергии Eк энергию трения Er и потенциальную энергию Eп. Здесь важным является, что по способу изобретения используют не произвольный закрывающий груз, а точно определенный, масса которого MG точно известна. При этом предпосылкой является, что масса М куска троса МS между закрывающим грузом G и шкивом 4.2 по сравнению с массой MG закрывающего груза G пренебрежимо мала. Если это не так, то массу троса MS нужно вводить в расчеты, добавляя ее к массе закрывающего груза G. Так как однако, масса троса MS между шкивом и грузом во время прохода испытательного участка изменяется, в расчеты вводят среднюю величину длины троса (l1 + l2) : 2. Известно также ускорение земного притяжения g, как природная константа. Ни основе замеренных в шаге 2 и запомненных величин, а именно скоростей створки V1 и V2, а также длины пути S1 в следующем шаге 4 составляется уравнение энергии - баланс - ЕВ1 для испытательного участка TS1. При этом важным является, что потенциальная энергия Eп закрывающего груза G на участке TS1 увеличивается и это приращение энергии с положительным знаком входит в баланс энергии ЕВ1. Для выражения EB1 получается
F
Аналогичным образом в шаге 5 составляется баланс энергий ЕВ2 для испытательного участка TS2, причем на этот раз потенциальная энергия Eп закрывающего груза G на испытательном участке TS2 уменьшается, и это уменьшение энергии отражается отрицательным знаком в энергетическое балансе ЕВ2
F
В заключение в шаге 6 получают формулы для определения динамической массы Mд, а также среднем силы трения . Оба энергетических баланса ЕВ1 и ЕВ2 представляют собой уравнения, которые вследствие различного действия закрывающего груза при открывании и закрывании дверей являются независимыми друг от друга и поэтому могут быть разрешены относительно Mд и 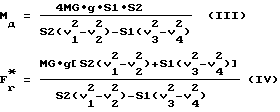

Из динамической массы Mд получается максимально допустимая по правилам техники безопасности скорость закрывания для створки двери 2 системы раздвижных дверей 1 следующим образом: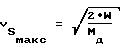 ,
,
где W - максимальная энергия закрывания раздвижной двери лифта 2.
Для специалиста понятно, что изобретение не ограничено указанным выше примером, в частности оно применимо в общем и для вертикально раздвигающихся дверей или для поворотных дверей. В этих случаях динамическая масса, а также средняя сила трения всех частей установки относится к вертикальному поступательному движению или вращательному движению створок дверей. Далее в энергетических уравнениях могут содержаться другие типы энергии и из них можно определить другие физические параметры.
Перевод надписей к чертежам:
Фиг.1 1) - Направление открывания
Фиг.2 1) - Привод включен. 2) - Привод выключен.
Фиг.3 1) - Старт. 2) - Учебный проход дверей? 3) - Двери закрыты? *За) - Закрыть двери. 4) - Первый шаг способа. 5) - Второй шаг способа. 6) - Ускорить створку до  и затем отключить привод. 7) - Измерить/запомнить V1 и Sa. 8) - Положение створки Sе? 9) - Измерить/запомнить V2 и SI = Se - Sа. 10) - Вновь включить привод двери и открыть ее совсем. 11) - Третий шаг способа. 12) - Ускорить створку до VS и затем отключить привод двери. 13) - Измерить/запомнить V3 и Sa. 14) - Положение двери Sе? 15) - Измерить, запомнить V4 и S2 = Sе - Sа. 16) - Включить снова привод двери и закрыть ее полностью. 17) - Четвертый шаг способа. 13) - Составить баланс энергии ЕВ1. 13а) - На участке TS1. 19) - Пятый шаг способа. 20) - Составить баланс энергии ЕВ2. 20а) - На участке TS2. 21) - Шестой шаг способа. 22) - Рассчитать:
и затем отключить привод. 7) - Измерить/запомнить V1 и Sa. 8) - Положение створки Sе? 9) - Измерить/запомнить V2 и SI = Se - Sа. 10) - Вновь включить привод двери и открыть ее совсем. 11) - Третий шаг способа. 12) - Ускорить створку до VS и затем отключить привод двери. 13) - Измерить/запомнить V3 и Sa. 14) - Положение двери Sе? 15) - Измерить, запомнить V4 и S2 = Sе - Sа. 16) - Включить снова привод двери и закрыть ее полностью. 17) - Четвертый шаг способа. 13) - Составить баланс энергии ЕВ1. 13а) - На участке TS1. 19) - Пятый шаг способа. 20) - Составить баланс энергии ЕВ2. 20а) - На участке TS2. 21) - Шестой шаг способа. 22) - Рассчитать:
Примечание. Прописеая J в прямоугольниках обозначает "Да", прописная N в прямоугольниках - "Нет".
Использование: автоматическое управление лифтами, в частности количественное определение в системе раздвижных дверей массу и силу трения всех подвижных соединенных друг с другом частей установки в отношении створок дверей и с помощью закрывающего груза. Для этого створка двери подвергается учебному проходу открывания и проходу закрывания. На испытательном участке проход проводится с определением кинематических параметров V1, V2, S1 или V3, Vv4, S2 и составляется первый баланс энергии ЕВ1 или второй баланс энергии ЕВ2. Энергетические балансы ЕВ1 и ЕВ2 содержат потенциальную энергию Eп закрывающего груза с положительным или отрицательным знаком. При этом проводятся в комбинации специальные формулы для числового определения величин динамической массы Mд и средней силы трения F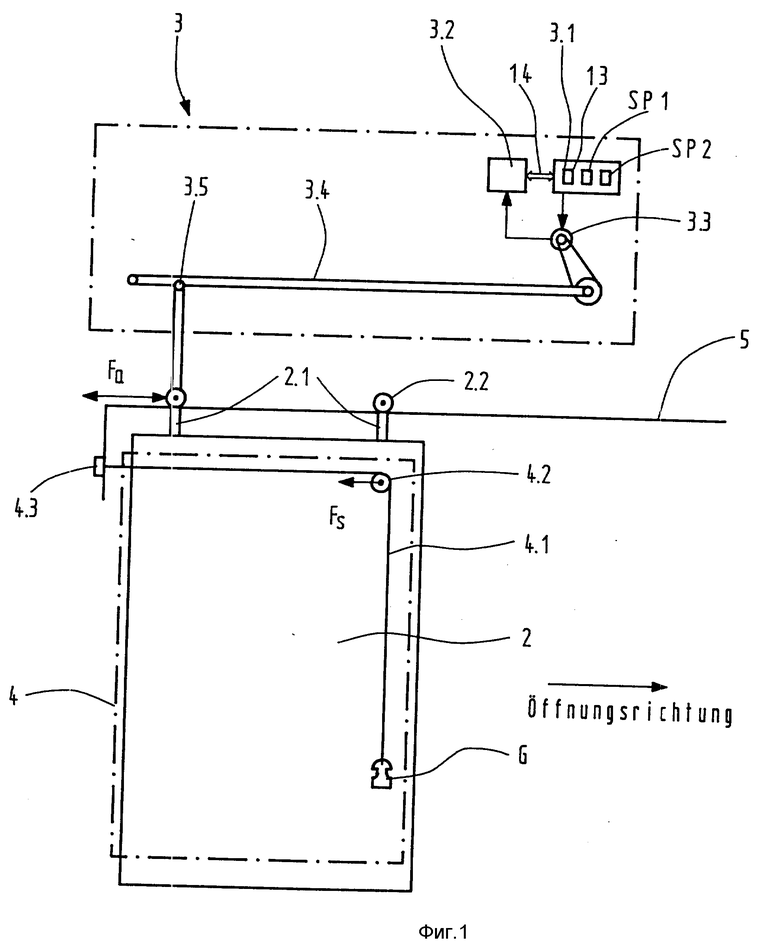
где md динамическая масса системы раздвижных дверей, кг;
V1 положительная скорость створки двери в начале первого испытательного участка, м/с;
V2 положительная скорость створки двери в конце первого испытательного участка, м/с;
S1 длина первого испытательного участка, м;
F
mG масса закрывающего груза, кг;
g ускорение земного притяжения, м/с2;
V3 отрицательная скорость створки двери в начале второго испытательного участка, м/с;
V4 отрицательная скорость створки двери в конце второго испытательного участка, м/с;
S2 длина второго испытательного участка, м.
4. Способ по п.1, отличающийся тем, что для повышения точности способа массу части троса между закрывающим грузом и шкивом добавляют к массе закрывающего груза и для расчета массы троса учитывают среднюю длину троса
lx (l1 + l2) 2,
где l1 длина части троса между закрывающим грузом и шкивом в начале первого и второго испытательных участков, м;
l2 длина троса между закрывающим грузом и шкивом в конце первого и второго испытательных участков, м.
mG•g 2 • Fhm a x.
V3 (V1 + V2) 2 V4. следующим образом:
следующим образом:
где W максимально допустимая из соображения безопасности энергия закрывания системы раздвижных дверей, нм.
| CH, патент, 399775, кл | |||
| Устройство для усиления микрофонного тока с применением самоиндукции | 1920 |
|
SU42A1 |
