Изобретение относится к полностью автономным и автоматическим устройствам для постоянного ухода за газонами.
Выражение "автономный и автоматический" означает, что устройство работает без вмешательства человека в течение всего или части периода косьбы и принимает решения, касающиеся оценки препятствий, их обхода, поиска зон, подлежащих скашиванию, очередности работы и определения границ скашиваемых зон.
Устройство не требует дозаправки топливом от источника энергии.
Под "постоянным уходом за газоном" понимается, что устройство в период косьбы постоянно находится в состоянии готовности к работе и может приводиться в действие в зависимости от определенных параметров, что, среди прочего, позволяет устранить проблему уборки срезанной травы.
Как известно, газонокосилки совершенствовались достаточно долго. Самоходные модели, широко распространенные в настоящее время, значительно сократили объем работы пользователя. Тем не менее участие человека требуется. Делались попытки частично или полностью автоматизировать работы по косьбе, но в полной мере удовлетворительные результаты не были получены до сих пор.
Так, в патенте США N 4777785 описана модель робота-косаря, который обнаруживает подстриженный и неподстриженный участки газона и может следовать вдоль границ участка, где трава уже скошена и автоматически косить оставшиеся участки. Однако эта система не является полностью автоматической. Она требует позиционирования машины при каждой косьбе и осуществляет обход препятствий посредством ручного управления.
Из патента Франции N 2631466 известна полностью автоматическая система, однако для ее использования необходимо провести значительную предварительную работу по прокладке ряда кабелей специального назначения.
Большинство других подобных систем, известных из предшествующего уровня техники, требуют участия человека (патенты США NN 3425197, 3924389, 4133404, 4545453), а именно прокладку в землю кабелей (патенты США NN 3550714, 3570227). Помимо этого эти устройства имеют большой вес, сложны в эксплуатации и не являются автономными по отношению к источнику энергии.
И наконец, известны снабженные программой устройства, которые перемещаются на газоне по определенному маршруту. Тем не менее они могут случайно отклониться от заданного курса и причинить какое-либо повреждение. Таким образом, эти устройства также нуждаются в установке их вручную в определенное положение каждый раз перед началом косьбы.
Известна автономная газонокосилка (US 4919224), содержащая приводные колеса и режущую систему, связанные с электродвигателями, к которым также подключена электронная система управления для управления приводными колесами и режущей системой. Для питания электродвигателей и электронной системы управления предусмотрен портативный источник питания в виде перезаряжаемой батареи и/или фотогальванических элементов.
Недостатком этой газонокосилки является необходимость участия при ее работе человека, в частности, в таких операциях как определение участков газона с высокой травой, подлежащих скашиванию, установка косилки на эти участки, вывод за пределы участков с недостаточной освещенностью, управление перемещением косилки при наличии на ее пути препятствий или границ газона и пр.
Все известные косилки используют "прерывистый" способ косьбы, т.е. косилка работает в течение заданных периодов времени, разделенных нерабочими периодами, когда ее убирают.
Задачей изобретения является создание автоматического и автономного устройства, лишенного названных выше недостатков, таких как вмешательство в ее работу человека, сложная инфраструктура, необходимость установки и удаления косилки, а также исключающего необходимость сбора срезанной травы, благодаря постоянной работе устройства.
Поставленная задача решается тем, что в автономной газонокосилке, включающей электродвигатели и содержащей по меньшей мере одно приводное колесо, режущую систему, электронную систему управления, сообщенную с электродвигателями, связанными с приводными колесами и режущей системой, и портативный источник энергии, выполненный в виде перезаряжаемой батареи и/или фотогальванических элементов для питания электродвигателей и электронной системы управления, согласно изобретению общая мощность, потребляемая указанными двигателями, составляет менее 120 Вт, а электронная система управления снабжена микропроцессором с памятью для хранения алгоритма и подключенными к микропроцессору средствами обнаружения препятствий или границ газона и средствами регистрации перезаряжаемой батареи и/или фотогальванических элементов, при этом электронная система управления выполнена с возможностью управления газонокосилкой в соответствии с сигналами от указанных средств обнаружения, соответствующими наличию препятствий или границ газона, и с возможностью управления по алгоритму, который постоянно поддерживает косилку либо в состоянии работы, либо в состоянии ожидания солнечного света или подзарядки перезаряжаемой батареи с зависимостью работы от величины заряда перезаряжаемой батареи и/или интенсивности солнечного света.
По сравнению с существующими системами предлагаемая косилка имеет существенно меньший вес, позволяет использовать маломощный двигатель, повышая безопасность в эксплуатации, и работает бесшумно.
Было установлено, что такое устройство может работать, как это ни удивительно, от источника энергии весьма малой мощности, менее 100 Вт. В соответствии с предпочтительным вариантом осуществления изобретения, питание устройства обеспечивается от фотогальванических элементов, при этом в качестве единственного источника энергии используется солнечная энергия. Низкая мощность устройства может быть компенсирована тем, что косьба выполняется почти постоянно в течение всего сезона косьбы или части этого сезона, так что газон фактически поддерживается в подстриженном состоянии.
В соответствии с изобретением под словом "косьба" понимается как скашивание газона, на котором трава такая высокая, что ее нужно косить, так и просто небольшая стрижка травы для поддержания газона в подстриженном состоянии. Тем не менее изобретение по своей сущности больше подходит для поддержания газона подстриженным. Первоначальная косьба газона со слишком высокой травой может мешать нормальной работе предлагаемого устройства, мощность которого ограничена. Поэтому косилка представляет собой средство для выполнения косьбы, как это определено выше.
Описанное ниже устройство в особенности приспособлено для скашивания газонов. Однако предлагаемая косилка может быть использована для обработки участков, поросших различными другими растениями, уход за которыми может быть достигнут путем их постоянного или периодического подстригания до определенной высоты, как правило, менее 80 см, предпочтительно менее 20 см. В частности, предлагаемое устройство может применяться для непрерывной расчистки земли от мелколесья. Поэтому термин "газон" включает многочисленную растительность кроме травы.
Термин "колесо" в объеме настоящего изобретения включает также гусеницы и все другие эквивалентные средства перемещения.
Выражение "постоянно находится в состоянии готовности к работе" подразумевает, что устройство способно реагировать на параметры окружающих условий или на величину заряда батареи и запускается без вмешательства пользователя. В соответствии с предпочтительным вариантом осуществления изобретения, электронная схема и микропроцессор работают постоянно, даже когда устройство находится в неподвижном состоянии или в состоянии подзарядки или ожидания.
В соответствии с предпочтительным вариантом осуществления изобретения газонокосилка содержит фактически одну подзаряжаемую батарею, которая может заряжаться от фотогальванических элементов.
В соответствии с другим вариантом осуществления изобретения, подзаряжаемая батарея может заряжаться от источника питания, установленного на участке, подлежащем скашиванию, или вблизи этого участка, при этом косилка автоматически перемещается в соответствии с определенным алгоритмом в зависимости, среди прочего, от величины заряда указанной батареи.
В соответствии с одним из аспектов изобретения, косилка характеризуется тем, что суммарная мощность находится в переделах от 10 до 120 Вт, предпочтительно от 15 до 60 Вт.
В соответствии с другим аспектом изобретения, косилка характеризуется тем, что емкость подзаряжаемой батареи меньше 5 Ампер-часов, предпочтительно, меньше 2 Ампер-часов.
В соответствии с еще одним аспектом изобретения, косилка прекращает всякое движение и все операции по косьбе, если величина заряда батареи или интенсивность солнечного света меньше порогового значения, и находится в состоянии ожидания или в состоянии подзарядки.
В соответствии с еще одним аспектом изобретения, косилка характеризуется тем, что ее маршрут определяется в значительной мере величиной силы, создаваемой режущей системой.
В соответствии с еще одним аспектом изобретения, косилка характеризуется тем, что с каждым ведущим колесом связан независимый двигатель.
В соответствии с еще одним аспектом изобретения, косилка характеризуется тем, что с каждым ведущим колесом соединен датчик заряда.
В соответствии с еще одним аспектом изобретения, косилка выполнена с возможностью обнаружения границ подлежащего скашиванию участка, определенных одним кабелем или несколькими кабелями, питаемыми слабым током, с помощью датчика поля, расположенного на передней части указанного шасси.
В соответствии с еще одним аспектом изобретения, косилка выполнена с возможностью обнаружения и обхода препятствий путем анализа относительного перемещения верхней пластины, на которой могут быть расположены фотогальванические элементы, относительно нижнего шасси.
В связи с этим может быть предусмотрена система анализа ударов, которая способна отличать удар, вызванный наличием препятствия, от ударов вследствие неровностей поверхности земли (ямки или бугры), которые не нужно обходить. Алгоритм, прилагаемый к микропроцессору, позволяет не принимать во внимание различные колебания, вызванные неровностями земли, например, путем использования известных методов цифровой фильтрации.
В соответствии с еще одним аспектом изобретения, косилка характеризуется тем, что вес подзаряжаемой батареи меньше 5 кг, предпочтительно, меньше 1 кг.
Согласно изобретению, предложен также способ скашивания газона, по которому описанную выше косилку устанавливают в определенное место и оставляют в автономном режиме по меньшей мере на несколько дней.
В частности, предлагаемый способ особенно подходит для поддержания газона в скошенном состоянии, при этом косилку устанавливают в определенное место и оставляют в автономном режиме по меньшей мере на несколько дней, возможно, на несколько недель или на сезон косьбы, который длится несколько месяцев.
Более конкретно, согласно изобретению предложена газонокосилка, содержащая следующие элементы, в отдельности или в сочетании:
- маломощную режущую систему, которая позволяет питать косилку непосредственно от фотогальванического источника энергии,
- источник питания, образованный фотогальваническими элементами,
- электронную систему управления,
- средства обнаружения участков с травой, подлежащей стрижке, путем измерения силы, создаваемой режущей системой,
- средства поиска участков с травой, подлежащих стрижке, путем взаимодействия системы перемещения косилки, указанных средств обнаружения и микрокомпьютера,
- средства обнаружения препятствий путем анализа перемещения верхней пластины косилки относительно ее шасси,
- средства обнаружения границ участка, подлежащего скашиванию, путем анализа расстояния между двумя препятствиями.
Граница скашиваемого участка, которая не образована естественными препятствиями (деревья, сетка, низкая стенка, бордюр), определяется либо наличием контактных штырей, расположенных на земле с заданными максимальными интервалами, либо уложенным на земле или закопанным в землю кабелем.
- систему безопасности, основанную на использовании датчика заряда на каждом колесе,
- противоугонное устройство, основанное на измерении расстояния до земли и/или на использовании кода, принадлежащего пользователю.
Особенно оригинальным свойством косилки является то, что ее устанавливают на подлежащий скашиванию участок в начале сезона и она начинает работать, как только световая энергия превышает некоторый порог.
Поэтому преимущество косилки состоит в том, что ее можно оставить на подлежащем скашиванию участке по меньшей мере на несколько дней, а также оставить в автономном режиме на несколько месяцев и даже на весь сезон косьбы.
В соответствии с одним из вариантов осуществления изобретения, косилка, находясь в состоянии работы, постоянно перемещается по скашиваемому участку, заставляя режущую головку совершать колебательные движения вправо и влево от направления перемещения.
Колебания головки позволяют определять расстояние между двумя препятствиями. Если косилка обнаруживает препятствие, например, слева, то она перемещает режущую головку направо, и если при этом обнаруживает справа препятствие на расстоянии, меньшем запрограммированного расстояния, то компьютер оценивает это как достижение косилкой границ обрабатываемого участка и возвращает ее назад.
Кроме того, в соответствии с предпочтительным вариантом осуществления изобретения, когда косилка достигает уже скошенной зоны, нагрузка на режущую головку падает и управляющий компьютер, обнаружив это, подает на ведущие колеса больше энергии, пока косилка не встретит нескошенную зону.
Алгоритм управляющего компьютера позволяет оптимизировать этот поиск и организовать работу по косьбе. Предпочтительно, чтобы компьютер был снабжен часами, опрашиваемыми рабочим алгоритмом.
Особенность одного из вариантов осуществления изобретения состоит в том, что когда косилке встречается препятствие, ее верхняя пластина, несущая фотогальванические элементы, контактирует с препятствием. Верхняя пластина, скрепленная с нижней пластиной гибкой связью, перемещается относительно нижней пластины. На это относительное перемещение реагирует соответствующий датчик, который определяет положение препятствия по отношению к косилке. Эта информация передается на компьютер, который управляет ведущими колесами так, чтобы отойти от препятствия, обойти его или повернуть назад.
Косилка в соответствии с изобретением предпочтительно содержит подзаряжаемую батарею, которая, с одной стороны, обеспечивает косьбу в затененных зонах и, с другой стороны, выравнивает ток от фотогальванического источника и питает электронную систему управления, что постоянно поддерживает косилку в состоянии готовности к работе и делает возможным ее пуск в зависимости от определенных параметров, таких как величина заряда батареи, условия окружающей среды и интенсивность солнечного света.
Кроме того, могут быть предусмотрены средства обнаружения затененных зон и организации последовательности косьбы с учетом различных параметров, например, уровня заряда батареи, времени суток, высоты травы и пр.
В соответствии с предпочтительным вариантом осуществления изобретения косилка содержит шасси с двумя независимыми ведущими колесами или гусеницами, каждое (или каждая) из которых приводится в действие электрическим двигателем. Раздельное управление скоростью каждого колеса позволяет управлять направлением перемещения косилки. Косилка содержит также одно или два свободных колеса спереди, так что колеса, несущие шасси, образуют треугольник или трапецию. Режущая головка, образующая одно целое с шасси, содержит низковольтный маломощный электрический двигатель и режущий диск малого диаметра с высокой производительностью.
Пластина, несущая фотогальванические элементы, скреплена с шасси с помощью гибкого соединения.
Косилка также содержит коробку с электронным оборудованием, в которой находятся
- управляющий компьютер,
- датчик перемещения пластины с фотогальваническими элементами,
- мощные схемы для управления
- режущей головкой,
- двумя ведущими колесами,
- звуковой сигнализацией, если она есть,
- током, поступающим от фотогальванических элементов,
- схема измерения энергии, потребляемой режущим устройством.
Предпочтительно, чтобы к коробке с электронным оборудованием были присоединены три датчика заряда (или один на колесо).
В связи с изложенным предлагаемая косилка имеет очень малый вес, например, 4 кг, в то время как автоматическая косилка, работающая от батарей, весит 40 кг, а также высокоэффективное режущее устройство и программу обработки данных, обеспечивающую поиск зон, нуждающихся в скашивании, поиск и обход затененных зон, обнаружение препятствий, обнаружение границ участка, подлежащего скашиванию, обнаружение и преодоление неровностей земли (склоны, бугры) и определение степени влажности газона.
Предлагаемая косилка позволяет поддерживать в подстриженном состоянии газон площадью 1000 м2 на широте Бельгии при среднем потреблении мощности (при работе) 25 Вт.
Изобретение более подробно описано ниже со ссылками на фиг. 1-15, на которых показаны примеры осуществления изобретения, не ограничивающие его объем.
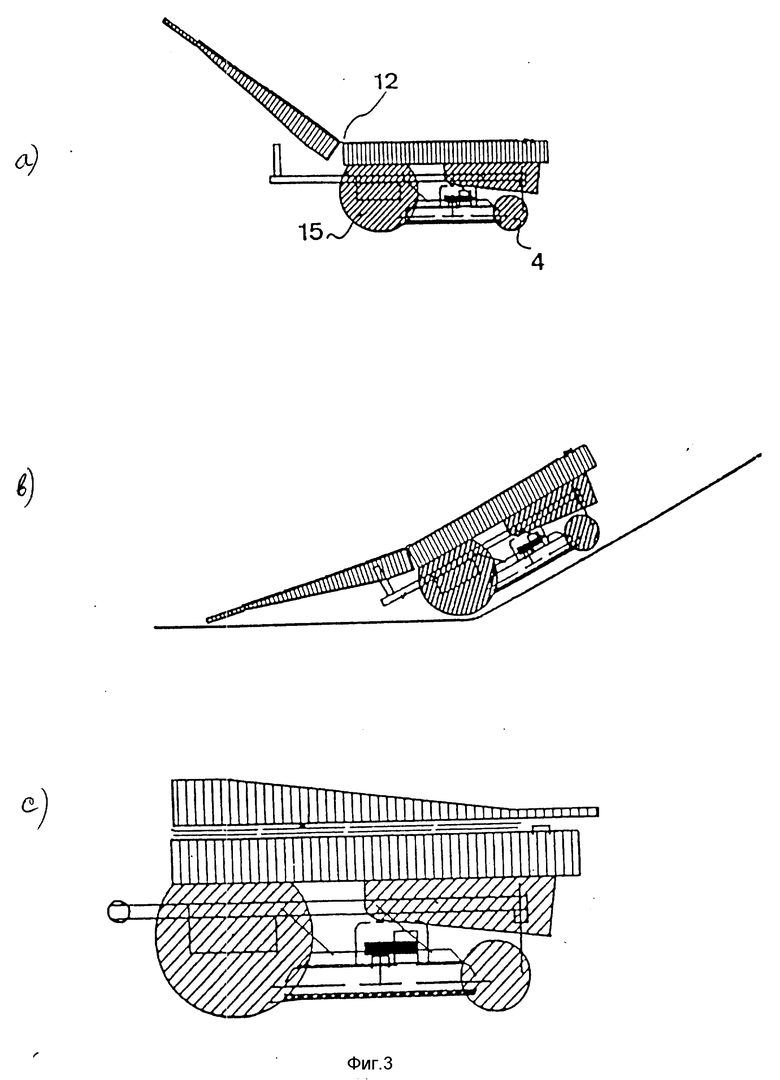
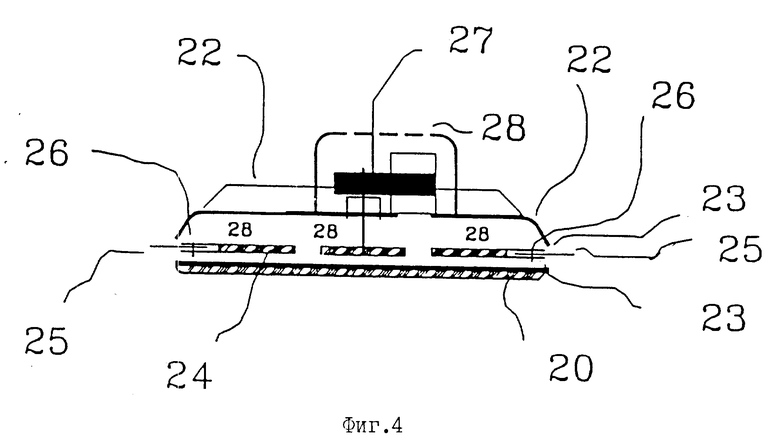
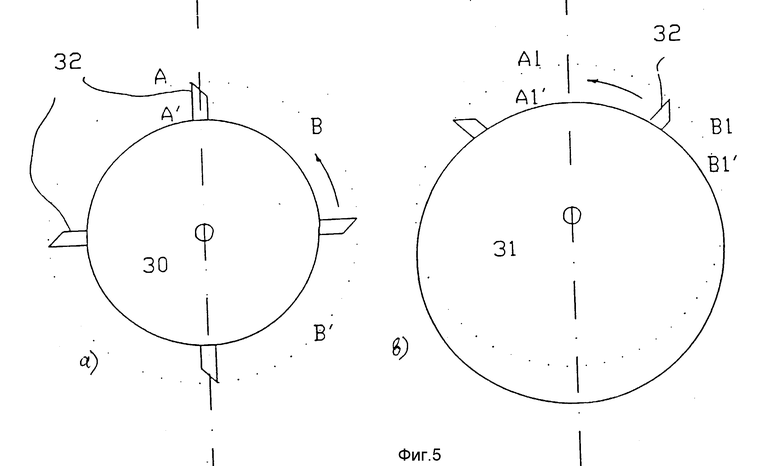
На фиг. 1 изображен вид сверху, с частичным вырывом, на один из вариантов выполнения предлагаемой косилки с овальным профилем; на фиг. 2 - сечение косилки, изображенной на фиг. 1; на фиг. 3 - вид сбоку на косилку: a - с частично опущенной задней частью, b - при ее въезде на склон, c - в полностью сложенном положении посредством поворота вокруг шарнира; на фиг. 4 - поперечное сечение режущей головки; на фиг. 5 - вид сверху режущей головки: a, b - два варианта выполнения; на фиг. 6 - блок-схема с некоторыми элементами косилки и их связь с электронной системой управления; на фиг. 7, 8 - упрощенная блок-схема программы управления; на фиг. 9-12 - алгоритмы косьбы, которые могут быть использованы; на фиг. 13 и 14 - примеры электронных схем соответственно для предотвращения разряда батареи, когда косилка находится в состоянии ожидания, и для защиты от магнитных помех, создаваемых работой двигателя, на уровне датчика границ, например, датчика поля.
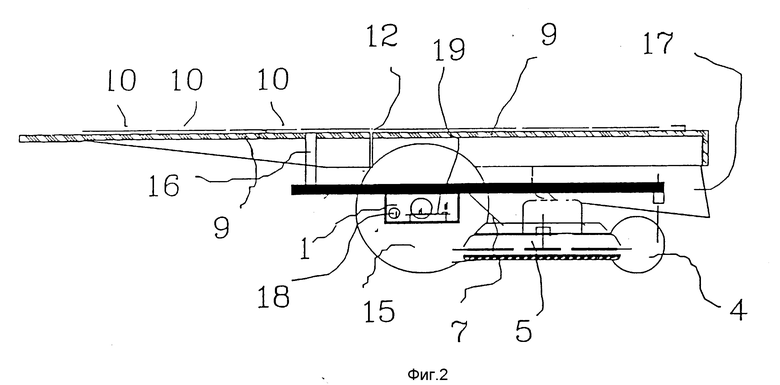
В соответствии с фиг. 1 и 2 на шасси 1, выполненном в виде бруска, установлены электронная схема управления, подробно описанная ниже, два редукторных двигателя ведущих колес 15, батарея 18 малой емкости (например, 1 Ампер-час), обеспечивающая резервное питание схемы в случае отсутствия света и выравнивание тока от фотогальванических элементов. На шасси находится панель 9 с фотогальваническими элементами 10, размещенными один рядом с другим в виде мозаики. Кроме того, на шасси имеются гибкие соединительные элементы 2, которые расположены по оси А-А1 двух ведущих колес 15 и делают возможным относительное перемещение панели 9.
В соответствии с конкретным примером осуществления изобретения, могут быть использованы 34 фотогальванических элемента 100х100 мм PS C100H (Kyocera) мощностью 44,2 Вт (пиковое значение).
Гибкие соединительные элементы 2 позволяют панели 9 перемещаться в продольном направлении и препятствуют ее поперечному перемещению. Косилка двигается перпендикулярно оси А-А1.
Контакты 3, расположенные по обеим сторонам соединительных элементов 2, позволяют обнаруживать поступательное или поворотное движение панели 9 и с помощью управляющего компьютера 19 определять местоположение препятствия. Контакты могут быть заменены любыми другими электронными датчиками перемещения и положения.
Перед шасси установлены два свободных колеса 4, механически соединенные с ним. Режущая головка 5 подвешена между шасси и колесами 4.
В соответствии с рассматриваемым примером осуществления изобретения режущая головка подвешена на двух продольных балках 6 с помощью снабженных резьбой стержней, позволяющих регулировать положение режущей головки по высоте.
Возможно также соединение режущей головки с продольными балками с помощью двух образованных трубками параллелограммов 7 (фиг. 2), верхние продольные стороны которых выполнены за одно целое с шасси и углы которых образованы шарнирами. Имеется упор, позволяющий регулировать высоту режущей головки, не препятствуя ее перемещению вперед.
Преимущество последнего из указанных вариантов состоит в возможности подъема режущей головки при наличии на земле неровностей, когда косилка маневрирует в реверсе. С другой стороны, при движении вперед пара ведущих колес облегчает перемещение передней части косилки в случае сопротивления движению, что позволяет легко проходить препятствия без необходимости убирать головку. Между режущей головкой и верхней панелью может быть предусмотрена механическая связь (не показана) для того, чтобы автоматически регулировать высоту переднего ограждения 17 до высоты резки.
На передней части косилки установлен датчик 8 поля.
Вместо датчика 8 могут быть использованы датчики других типов, например, магнитные, оптические и т.д.
Панель 9, несущая фотогальванические элементы 10, прикреплена к шасси с помощью соединительных элементов 2 и поворотного соединительного элемента 11, расположенного на передней части косилки.
Как более подробно показано на фиг. 3, панель 9 выполнена из двух частей, способных поворачиваться вокруг шарнира 12.
Наличие сочлененной панели обеспечивает решение ряда проблем, возникающих при практической реализации косилки.
Шарнирное крепление задней части панели дает возможность уменьшить высоту косилки и в то же время преодолевать значительные склоны, а также сохранить достаточную площадь поверхности панели и надлежащим образом сбалансировать вес на ведущих колесах. Правильная балансировка косилки влечет за собой консольную нагрузку на заднюю часть. Когда косилка въезжает на склон, задняя часть панели поворачивается вокруг шарнира при физическом контакте с землей, делая возможным прохождение косилки по наклонным участкам.
Более того, панель может поворачиваться на 180o, так что довольно большой продольный размер косилки уменьшается вдвое и становится более удобно транспортировать ее в нерабочем состоянии.
На фиг. 4 и 5 показаны положения панели при въезде косилки на склон и, например, во время транспортировки в полностью сложенном виде, при этом косилка находится в нерабочем состоянии.
К шарнирному соединению прикреплен контакт 14 так, что косилка останавливается, если угол поворота панели превышает определенную величину. Таким образом, косилка автоматически останавливается в случае, если она переворачивается передней частью, или, в случае крайней необходимости, вручную путем подъема задней части панели.
Чтобы уменьшить нагрузку на шарнир, может быть дополнительно предусмотрен упор, допускающий горизонтальное перемещение панели. Этот упор 16 может быть к тому же использован в качестве ручки для переноса косилки.
К задней части шасси 1 прикреплена панель 13 управления, позволяющая пользователю полностью останавливать косилку или вводить данные в управляющий компьютер (защитный код, параметры движения).
Ведущие колеса 15 приводятся в действие индивидуально редукторными двигателями с номинальной мощностью от 2 до 10 Вт и выполнены так, что имеют хорошую сцепляемость в направлении, параллельном перемещению, и легко поворачиваются в перпендикулярном направлении. Например, выполнение их полыми значительно снижает вес и снимает консольную нагрузку с выходного вала редукторного двигателя.
Режущая головка предлагаемой косилки выгодно отличается тем, что обеспечивает оптимальную эффективность, уменьшая четыре вида расхода энергии:
- захват травы при перемещении режущего инструмента,
- аэродинамическое сопротивление, вызванное перемещением режущего инструмента,
- трение,
- фактическая сила резки.
Обычные режущие системы срезают траву под кожухом, при этом срезанная трава захватывается вращающейся системой.
Поэтому значительная часть энергии в процессе классической косьбы известными системами тратится на сообщение кинетической энергии траве, приводимой в движение режущим ножом.
Описанное ниже устройство, представляющее собой один из вариантов осуществления изобретения, в значительной мере исключает контакт травы с вращающейся системой.
Режущая головка фактически образована пластиной 20, соединенной фланцами 21 с верхней пластиной 22, имеющей такую форму, что между двумя пластинами остается очень малый зазор 23.
Диск 24 содержит, предпочтительно по меньшей мере два выдвижных ножа 25, которые могут поворачиваться вокруг вала 26 и возвращаться внутрь диска. Когда диск вращается от двигателя 27, ножи центробежной силой выдвигаются и выходят в зазор 26 между неподвижными пластинами 20, 22.
Находящаяся в контакте с травой подвижная часть весьма мала, что значительно ограничивает захват травы вращающейся системой.
Циркуляция воздуха 28, обусловленная вращением диска, но поддерживаемая на минимальном уровне благодаря форме диска и малому зазору между неподвижными пластинами, препятствует поступлению воздуха в режущую головку и систему шарнирного крепления ножей. Трение на участке, подлежащем скашиванию, устранено благодаря нижнему диску 20 и тому, что обрезки травы удаляются в результате циркуляции воздуха 28.
Очень тонкие ножи 25 обеспечивают эффективную резку. Пружинная система позволяет легко заменять ножи.
Малая инерция ножей, их возврат во внутреннюю часть диска в случае удара и очень малая мощность двигателя являются факторами, благодаря которым достигается такое преимущество предлагаемой косилки, как безопасность при использовании.
На фиг. 5, a и b показан вариант выполнения режущей головки согласно изобретению, который оказался особенно удачным. Было установлено, что торможение, оказываемое уже срезанной травой режущему диску, минимально, когда в период между двумя последовательными проходами ножей 32 машина перемещается вперед на расстояние, соответствующее длине ножа. Зависимость между скоростью машины и скоростью ножей может быть выражена как
Скорость машины = Nxlxn
где N - число оборотов ножа в секунду
l - активная длина ножа
n - число ножей.
Однако это справедливо лишь для зоны, расположенной по оси машины, как показано на фиг. 5,а, где представлена классическая конфигурация. Стебель травы, срезанной в точке А, будет находиться под пластиной 30 в точке А1 ко времени прохождения следующего режущего ножа. С другой стороны, стебель травы, срезанной в точке B, будет много раз находиться на траектории ножей, прежде чем окажется в точке B1, в результате ножи подвергаются ненужному торможению из-за контакта с травой, не выполняя при этом существенной резки.
В соответствии с упомянутым выше вариантом, проиллюстрированным на фиг. 5, b используются нижняя и верхняя круглые пластины 31, размер которых соответствует участку, накрытому выдвинутыми ножами, и центр которых смещен назад на расстояние, равное полезной длине ножей. Расстояние, на протяжении которого стебель травы находится в контакте с режущими ножами, становится постоянным независимо от его положения относительно оси машины.
При указанном выполнении режущей головки достигается значительная оптимизация расхода энергии.
Режущая головка приводится в действие предпочтительно двигателем постоянного тока без электронной коллекторной щетки. Этот выбор продиктован требованиями безопасности и эффективности, которая может быть достигнута в соответствии с принципом работы косилки. Согласно одному из вариантов осуществления изобретения, особенно подходит двигатель SEL Alcatel типа BC29 с номинальной мощностью 15 Вт при 12 В.
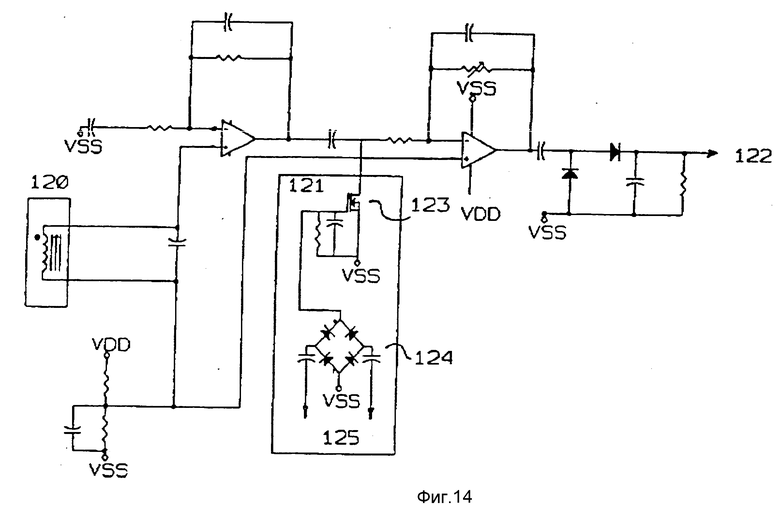
Однако работа двигателя с электронным коммутатором может вызвать резкие изменения магнитного поля, которые трудно устранить. Это может помешать работе датчика 8 границ, описанного выше.
Устранить помехи указанного типа позволяет схема, изображенная на фиг. 14. С этой целью предусмотрены датчик 120, схема 121 подачи шума, связь 122 с контроллером, транзистор 123 Т1, конденсаторы 124 (С1 и С2) и связи с источником питания режущей головки.
Сигнал контроллера двигателя подается на вход дифференцирующей цепи С1, и выпрямляется для получения положительного импульса при каждой коммутации двигателя. Эти импульсы поступают на транзистор Т1, который отключает сигнал, приходящий от датчика во время коммутации двигателя. Это позволяет улучшить отношение сигнал/шум, как правило, в 10 раз.
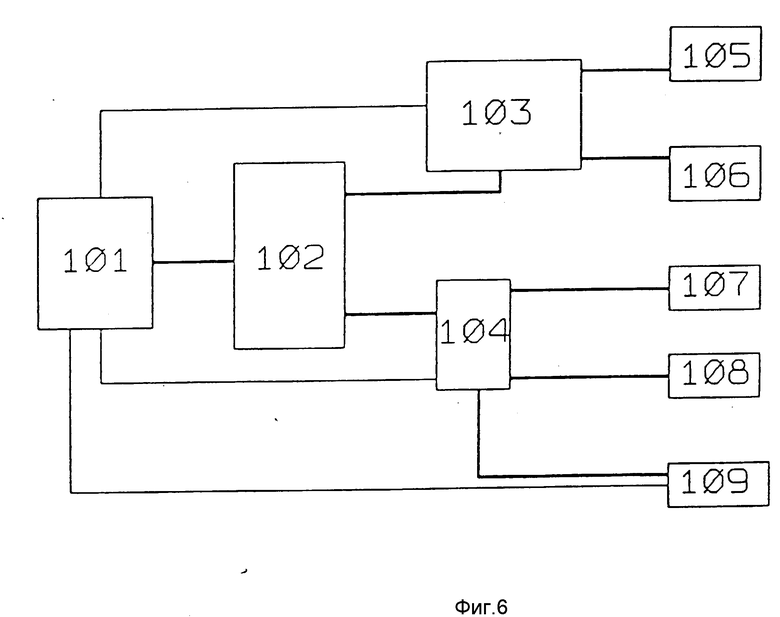
Как показано на фиг. 6, управление косилкой осуществляется с помощью электронной схемы управления, содержащей микроконтроллер 102 с хранимой в памяти программой управления косилкой. Также показаны устройство 103 управления энергией, устройство 104 управления двигателями, фотогальванические элементы 105 и батарея 106.
Микроконтроллер получает ряд данных (101) об окружающих условиях, например:
- напряжение на выходе фотогальванических элементов,
- скорость каждого колеса,
-ток в режущей головке или скорость вращения,
- ток, вырабатываемый фотогальваническими элементами,
- регистрация внешнего удара,
- уровень электрического поля в передней части косилки,
- влажность, и из этих данных вычисляет параметры:
- интенсивность солнечного света путем измерения тока и напряжения на выходе фотогальванических элементов в сочетании с их известными характеристиками,
- склоны или препятствия - путем определения зависимости скоростей колес от подаваемой мощности,
- высота травы - путем анализа тока, потребляемого режущей головкой, и скорости движения вперед,
- расстояние до границ участка земли, задаваемых проводом, по которому протекает переменный ток, или металлической массой (например цепью) и определяемых путем анализа сигнала, измеренного на выходе датчика 8,
- затененная зона - путем анализа изменения солнечного света при перемещении косилки на фиксированное расстояние,
- состояние земли - путем анализа отбрасывания воды на контакт, установленный на шасси.
Микроконтроллер посылает свои инструкции блоку управления энергией и управляющей схеме 104, которая работает на три двигателя 107, 108, 109, обеспечивающие работу косилки.
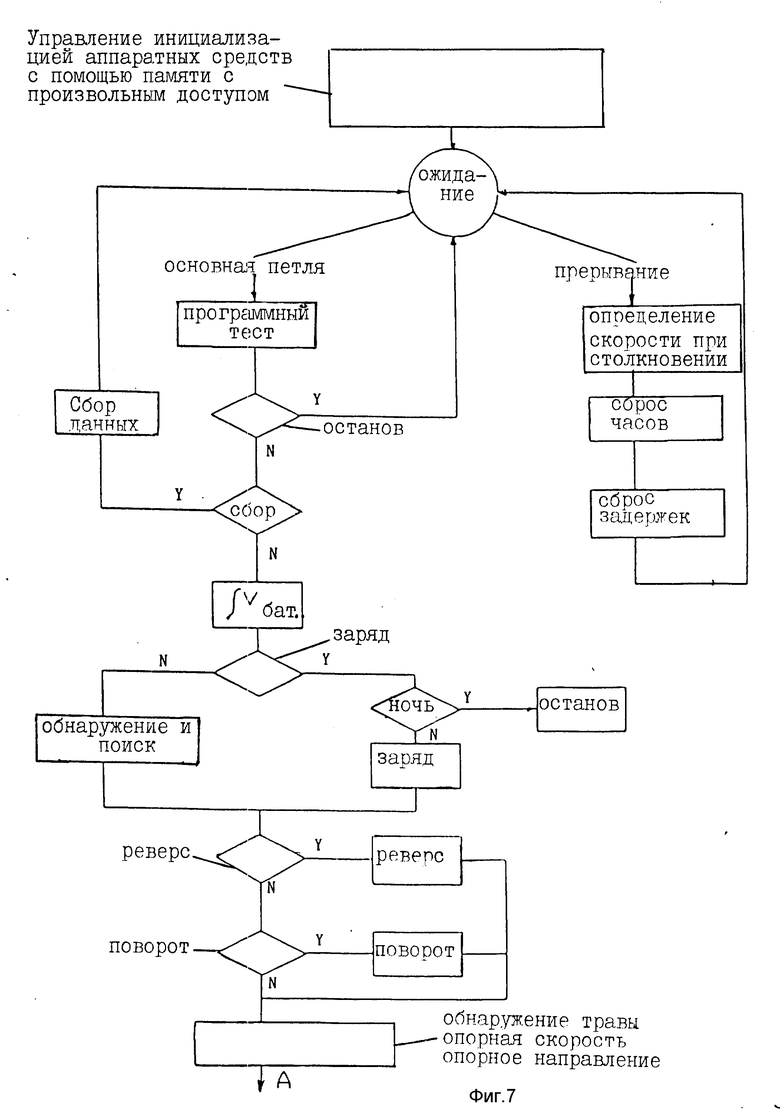
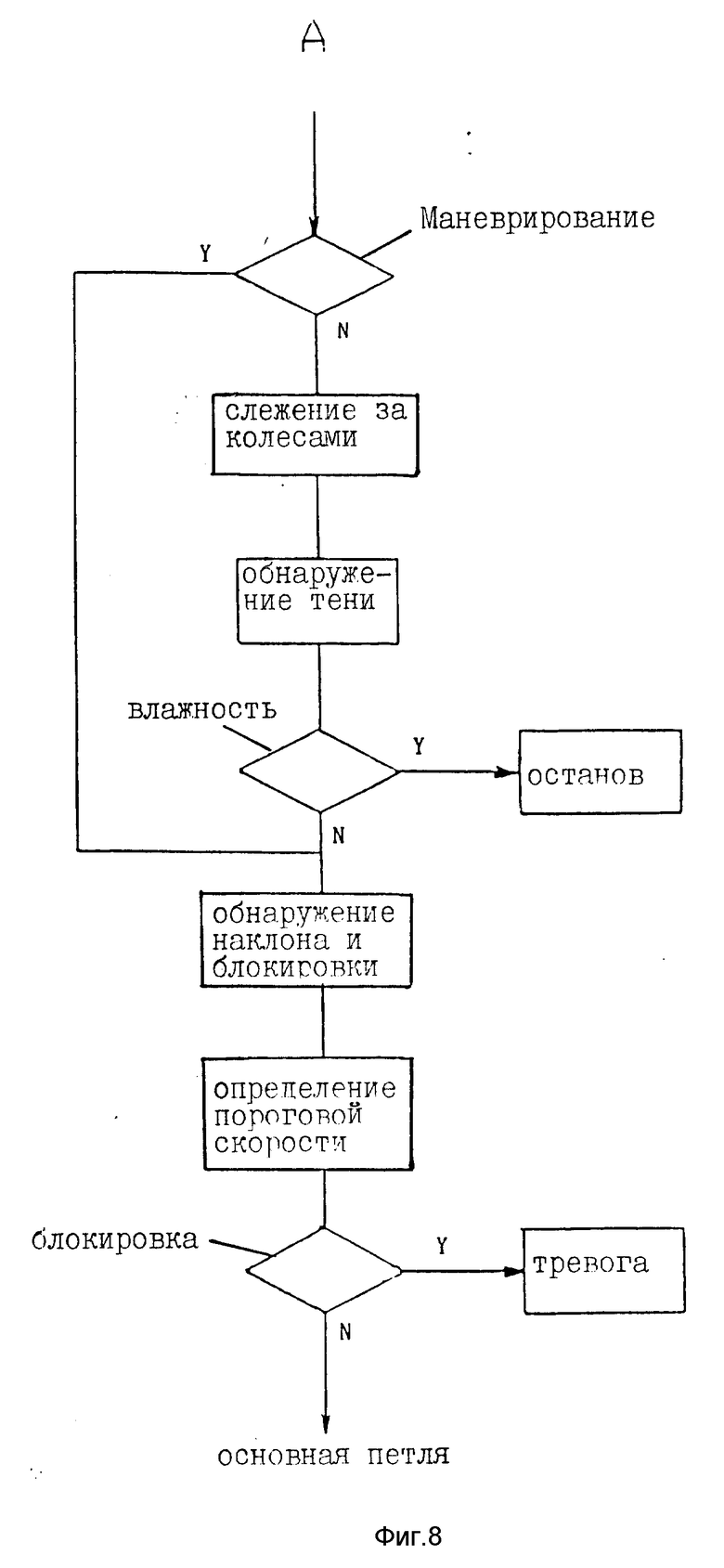
Пример управляющей программы представлен на фиг. 7, 8 с помощью блок-схемы.
Две основные петли управляют работой программы:
- петля, запускаемая сигналом прерывания, генерируемым каждые 4 мкс аппаратными средствами микропроцессора. Эта петля позволяет определять по отдельности приращения показаний спидометров двух ведущих колес, проверять "сторожевое" устройство, анализировать сигналы датчиков столкновений и корректировать часы и выдержки времени, которые должны быть использованы основной петлей,
- основная петля, которая инициирует сбор данных об окружающих условиях каждые 100 мс и которая в зависимости от результатов анализа внешних параметров управляет следующими операциями, осуществляемыми косилкой в ее различных состояниях:
- резка,
- маневрирование (реверс, поворот),
- остановка из-за слишком слабой освещенности,
- остановка из-за слишком мокрой травы,
- остановка из-за подзарядки,
- тревога (происшествие, блокировка колес).
Изобретение будет более понятным при рассмотрении дополнительного описания основных режимов его работы, приведенного ниже.
Могут быть приняты различные системы управления перемещением. Особенно подходящей оказалась система управления перемещением, основанная на анализе силы резки.
Сила обеспечиваемая режущей головкой, непрерывно измеряется и на систему управления передаются данные о плотности и высоте травы, подлежащей резке. Микроконтроллер регулирует скорость косилки и поддерживает ее оптимальной. Когда сопротивление резке слишком мало (зона уже подстрижена), контроллер передает на ведущие колеса максимальную энергию, чтобы косилка двигалась быстро до тех пор, пока не достигнет еще не скошенной зоны. Скорость может изменяться, например, от 1 до 5 км/ч.
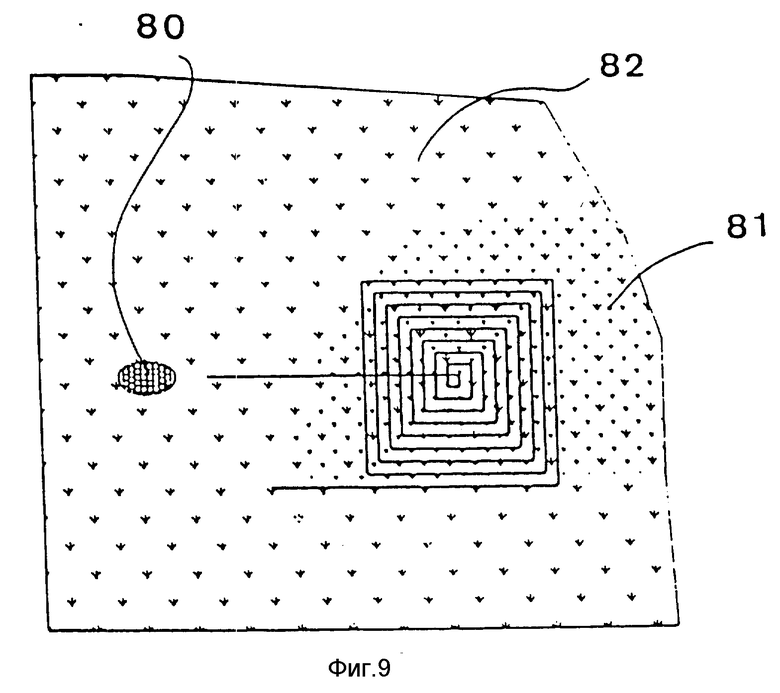
Как показано на фиг. 9, когда система управления обнаруживает нескошенную зону 81 на скашиваемом участке 82, косилка 80, выполненная в соответствии с изображением, входит внутрь этой зоны на определенное расстояние X и совершает движение по спирали так, чтобы как можно дольше оставаться в зоне с высоким сопротивлением резке (значительная высота и плотность травы). Когда косилка пройдет заранее определенное расстояние, не встречая дальнейшего сопротивления, она снова начинает перемещаться по прямой линии, подавая на ведущие колеса максимальную энергию, пока не попадет в новую нескошенную зону.
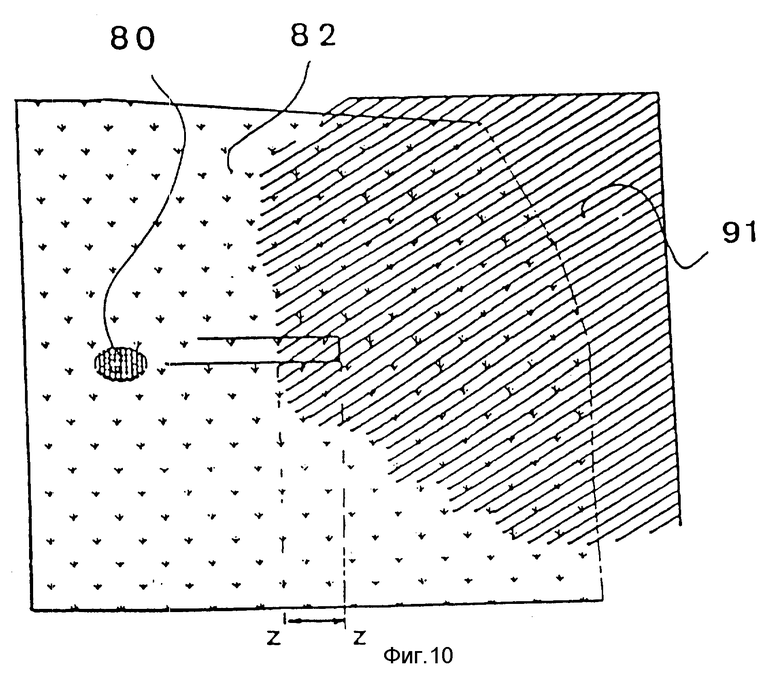
В соответствии с одним из вариантов осуществления изобретения предусмотрена система 91 обнаружения тени (фиг. 10).
Назначение этой системы состоит в том, чтобы косилка не оставалась длительное время в затененной зоне. Поскольку тень в течение дня постоянно перемещается в соответствии с движением солнца, можно скосить почти весь газон 82, оставаясь на солнце, если день солнечный. Небольшие зоны, постоянно находящиеся в тени, могут быть обработаны либо в часы, когда наблюдается облачность и, соответственно, отсутствует контрастность в освещенности, вызванной наличием тени, либо путем временного вторжения в затемненную зону во время нормальной работы.
Система управления определяет энергию, полученную фотогальваническими элементами в интервалы времени, соответствующие прохождению косилкой определенного расстояния, равного ширине одного фотогальванического элемента. Она непрерывно сравнивает полученную в данный момент энергию с энергией, полученной в предшествующий интервал времени. Прохождение одного ряда элементов с солнечного участка в тень вызывает регистрацию падения энергии. Если это падение энергии превышает заданное значение, то оно расценивается как сигнал въезда в затененную зону. Затем косилка продолжает двигаться вперед на некоторое расстояние ZZ1, чтобы проверить, не является ли эта затененная зона случайной. Если получаемая фотогальваническими элементами энергия остается на своем уменьшенном уровне, то косилка поворачивает назад в солнечную зону.
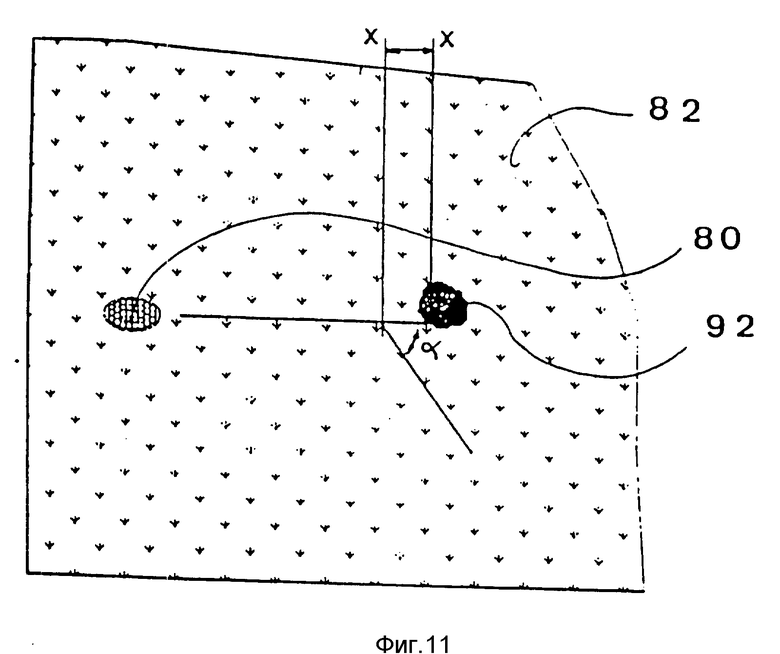
В соответствии с другим аспектом изобретения предусмотрена система 92 обнаружения препятствий (фиг. 11).
Система постоянно анализирует перемещение верхней панели относительно шасси. Когда это перемещение регистрируется с помощью контакта 3 и/или других датчиков аналогичного назначения, система останавливает косилку и заставляет ее маневрировать, отходя от препятствия, в соответствии с программой управления.
При этом в соответствии с одним из режимов косилка останавливается, идет назад на расстояние XX и поворачивается на угол α , после чего возобновляет обычное движение. В соответствии с другим режимом косилка поворачивается в направлении, противоположном направлению удара, что дает ей возможность проверить, есть ли свободное пространство вокруг препятствия. Если это пространство больше, чем ширина косилки, то она снова пускается в путь, а если это пространство меньше ширины косилки, то препятствие расценивается как протяженное, например, естественная граница обрабатываемого участка, и косилка отступает и поворачивается назад.
В соответствии с еще одним аспектом изобретения предусмотрена система обнаружения наклона и неровностей поверхности земли.
Система постоянно анализирует зависимость между энергией, подводимой к двум ведущим колесам, и их скоростями и по этим данным вычисляет сопротивление движению.
Комбинация этого параметра и данных от программы управления позволяет идентифицировать, например, застревание колес и осуществить ряд освобождающих их маневров (изменение направления, поворот и т.д.).
Это также дает возможность идентифицировать значительный наклон поверхности земли, в каковом случае программа осуществляет поворот косилки на заранее заданный угол, чтобы подойти к наклонному участку под углом к линии наклона, что снижает требования по энергии и позволяет использовать двигатели колес с мощностью и весом, совместимыми с принципом питания непосредственно от солнечной энергии.
В соответствии с еще одним аспектом изобретения, проиллюстрированным на фиг. 12, предусмотрена система обнаружения границ участка при отсутствии естественных границ в виде препятствий.
Если границы подлежащего скашиванию участка не образованы естественными препятствиями в виде барьеров, забора, бордюра, столбов (штырей с контактами) и т.п., то можно на землю вдоль желаемых границ поместить провод 93, по которому протекает переменный ток (например с частотой 5кГц) небольшой величины (амплитуда несколько миллиампер). Такой метод хорошо известен в управлении перемещением автономных устройств. Электрическая энергия может поступать от неподвижных фотогальванических элементов, например, на крайних участках провода или проводов, с преобразованием постоянного тока в переменный требуемой частоты.
В качестве альтернативы может быть использована пассивная система, которая является более надежной, так как не зависит от каких-либо источников питания и, в отличие от провода, не может быть выведена из строя в результате случайного разрыва. Например, можно положить на землю металлическую цепь. Датчик в передней части косилки будет реагировать на металлическую массу, которая изменяет его индуктивность.
Во всех случаях при приближении к границе участка система реагирует на наличие границы, анализируя сигнал датчика и вычисляя расстояние от косилки до границы. Когда это расстояние становится меньше заложенного в программу расстояния, косилка поворачивает и отходит до тех пор, пока расстояние не станет больше заложенного в программе.
Если при повороте косилки в одном направлении оказывается, что она приблизилась к границе вместо того, чтобы удалиться от нее, то система управления автоматически изменяет направление поворота. Если по какой-либо причине косилка подходит к границе слишком близко, то система управления запускает процедуру предотвращения столкновения, которая описана выше (реверс и затем поворот).
В соответствии с еще одним аспектом изобретения предусмотрена система управления энергией.
Блок управления энергией, управляемый микроконтроллером, выполняет две функции: управление величиной заряда резервной батареи, определение ночного периода и установку системы в состояние ожидания с минимальным потреблением энергии.
Батарея нужна для того, чтобы обеспечить работу электроники в темноте, сохраняя постоянно включенными некоторые схемы. Батарея обеспечивает также работу косилки в затененных зонах или при облачной погоде и выравнивает энергию фотогальванических элементов, поступающую во время дневной работы.
Система управления постоянно определяет напряжение на зажимах батареи и находит среднее арифметическое значение за данный период. Если среднее напряжение ниже запрограммированной критической величины, то система управления определяет, не находится ли косилка в затененной зоне, как описано выше. Если это не так, косилка останавливается и ждет до тех пор, пока напряжение не повысится до приемлемой величины.
Если обнаружено, что косилка находится в затененной зоне, то она до остановки выполняет процедуру выхода из этой зоны.
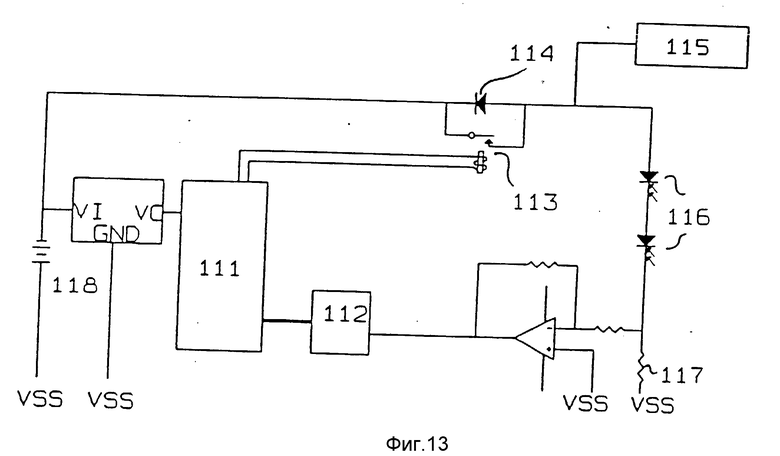
С наступлением ночи ток от фотогальванических элементов падает, плавно уменьшаясь до нуля, и даже становится отрицательным из-за разряда батареи через фотогальванические диоды.
Чтобы избежать этого явления, можно последовательно с батареей включить диод, который не допускает изменения направления тока. Однако при введении этого диода из-за падения на нем напряжения эффективность блока уменьшается.
Чтобы этого не происходило, диод при нормальной работе (в дневное время) согласно изобретению замыкается накоротко ключом (реле или транзистором), управляемым микроконтроллером. Это иллюстрируется схемой, представленной на фиг. 13, на которой показаны контроллер 11, аналого-цифровой преобразователь 112, контакт 113, диод 114, блок 115 управления двигателями, гальванические элементы 116, токоизмерительный шунт 117 и батарея 118.
Схема постоянно измеряет ток от фотогальванических элементов и когда обнаруживается нулевое значение, автоматически размыкается ключ, разъединяя фотогальванические элементы и элементы схемы батареи, при этом косилка устанавливается в состояние ожидания.
Включенный параллельно с ключом диод позволяет току вновь принимать положительные значения, когда напряжение от фотогальванических элементов превысит напряжение батареи и падение напряжения на диоде. Тогда косилка снова начинает работать и микроконтроллер замыкает контакт.
В предпочтительном варианте выполнения косилки она снабжена датчиком влажности, который сам по себе известен. Когда влажность превышает некоторое пороговое значение, косилка переводится в состояние ожидания. Если влажность уменьшается ниже порогового значения, работа косилки возобновляется в той мере, которую допускают параметры. Это позволяет избежать эксплуатации косилки во время дождя или на слишком влажном газоне, когда ее работа мало эффективна и когда она может застрять (грязь, лужи и т.п.).
Система управления перемещением косилки может использовать различные алгоритмы, отличные от того, который описан выше.
В соответствии с изобретением предусмотрена система составления "карты", позволяющая запоминать границы площади, которую нужно косить, зоны, которые уже скошены, и величину усилия резки для каждого из ранее скошенных элементарных участков этой площади. Это дает возможность оптимизировать маршрут косьбы, проходя более часто те зоны, где трава растет быстрее.
Эта система каждому элементарному участку площади назначает ячейку памяти с параметром "усилие резки - препятствие, образующее границу", что дает возможность сделать карту обрабатываемой площади. Косилка может выбрать свой маршрут, получив сведения о местонахождении препятствия, определенном ранее в процессе работы. Этот метод сам по себе известен. Сведения о скорости каждого ведущего колеса фактически характеризуют расстояние и направление.
Могут быть также введены системы установки косилки в определенное место и повторной установки путем периодического точного определения местонахождения генераторов (например, оптических, ультразвуковых или высокочастотных), размещенных на подлежащей скашиванию площади.
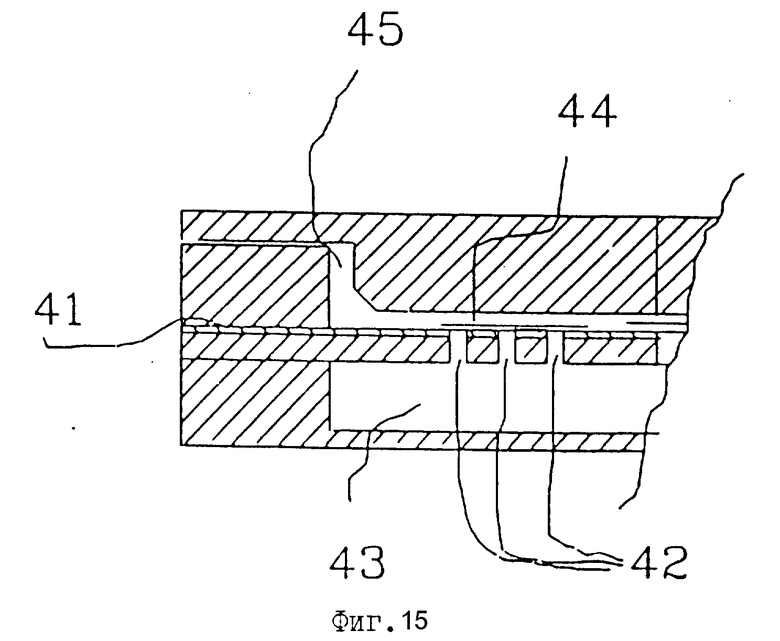
Ниже описана конструкция, решающая проблему выполнения достаточно жесткой, легкой верхней панели, эффективно защищающей фотогальванические элементы.
Как показано на фиг. 15, фотогальванические элементы размещены на листе 41 из эластичного материала на дне формы. Форма и эластичный лист снабжены отверстиями 42, расположенными под фотогальваническими элементами. Под формой, прижимающей фотогальванические элементы 44 к эластичному листу, образована полость 43. Элементы соединяют электрически между собой и в форму 45 вводят формующее вещество (жесткая полиуретановая пена), которое заделывает элементы в смоле. После затвердевания и обдирания наружная сторона панели, изготовленная предпочтительно слегка выпуклой, покрывается прозрачной пластмассовой мембраной, защищающей элементы от внешних воздействий, в том числе от дождя.
Изобретение не ограничено конкретными примерами его осуществления и допускает различные изменения в конструкции и отдельных деталях.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОКОСИЛКА | 2009 |
|
RU2415547C1 |
| ЭЛЕКТРИЧЕСКИЕ ГАЗОНОКОСИЛКИ | 2012 |
|
RU2581485C2 |
| Ручная газонокосилка | 1988 |
|
SU1535437A1 |
| ЭЛЕКТРИЧЕСКАЯ ГАЗОНОКОСИЛКА (ВАРИАНТЫ) | 2012 |
|
RU2578479C2 |
| Газонокосилка | 1979 |
|
SU942571A3 |
| ПОДВИЖНОЕ ОБОРУДОВАНИЕ ДЛЯ КОСЬБЫ РАСТЕНИЙ И КАРТЕР ДЛЯ НЕГО | 2007 |
|
RU2438290C2 |
| КОЛЕСНЫЙ АГРЕГАТ | 2015 |
|
RU2600620C1 |
| УСТРОЙСТВО ДЛЯ СБОРА ТРАВЫ | 2019 |
|
RU2706403C1 |
| НОЖ, ПРЕДНАЗНАЧЕННЫЙ ДЛЯ УСТАНОВКИ НА РОТАЦИОННОЙ КОСИЛКЕ, И КОМБИНАЦИЯ КОРПУСА РОТАЦИОННОЙ КОСИЛКИ И НОЖА | 2003 |
|
RU2306690C2 |
| КОСИЛКА РОТОРНАЯ УНИВЕРСАЛЬНАЯ | 1996 |
|
RU2098935C1 |

Использование: сельское хозяйство, а именно автоматические автономные устройства для скашивания травы. Сущность изобретения: газонокосилка снабжена электродвигателями и имеет по меньшей мере одно приводное колесо. Электродвигатели сообщены с приводными колесами и режущей системой. Электронная система управления снабжена микропроцессором с памятью для хранения алгоритмов управления газонокосилкой. Питание косилки осуществляется от перезаряжаемой батареи и/или фотогальванических элементов. Электронная система управления контролирует состояние батареи и/или интенсивность солнечного света, в зависимости от чего косилка находится в рабочем или нерабочем режимах. Также осуществляется контроль степени влажности скашиваемого участка травы, в зависимости от величины которой происходит управление режущей системой. Газонокосилка может управляться от сигналов, поступающих с соответствующих средств обнаружения, которые регистрируют наличие препятствий и/или границ газона, вдоль которых могут располагаться соответствующие провода. Малая потребляемая мощность позволяет использовать косилку даже при слабом солнечном освещении. 20 з.п. ф-лы, 15 ил.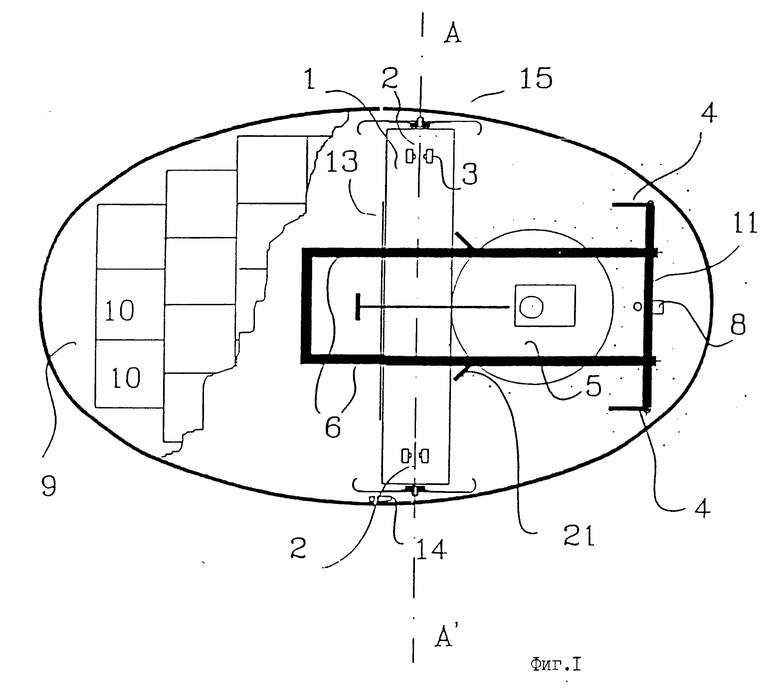
Приоритет по пунктам:
24.09.90 по пп. 1 4, 8 10, 12, 15, 17, 20 и 21.
| US, патент, 4942723, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

