изобретение относится к манипуляторостроению и может быть использовано для доставки манипуляторов в труднодоступные места, например, при выполнении различных технологических процессов в узких каналах или шахтах или в зонах повышенной радиации.
Известен агрегат для дистанционного проведения работ, преимущественно в шахте, содержащий подвешенные на тросе две платформы с манипуляторами, шарнирно соединенные между собой одними концами (SU, авт.св. 981174, кл. B 66 B 9/00, 1982).
Недостатком известного агрегата является его сложность и малая надежность его работы.
Техническим результатом изобретения является упрощение конструкции и повышение надежности работы.
Указанный технический результат достигается тем, что агрегат для дистанционного проведения работ, преимущественно в шахте, содержащей подвешенные на тросе две платформы с манипуляторами, шарнирно соединенные между собой одними концами, снабжен крепежным диском, связанным с упомянутым тросом и шарнирно прикреплены к середине шарнирного соединения платформ, при этом каждая платформа состоит из двух частей, шарнирно связанных между собой в месте шарнирного соединения платформ, а каждый манипулятор размещен с возможностью перемещения посредством колес вдоль одной части соответствующей платформы, причем другая часть каждой платформы размещена с возможностью контакта со стенками шахты посредством упора и снабжена подпружиненным стержнем, на одном конце которого установлены ролик для взаимодействия со стенками шахт и тормоз для ролика, а другой конец связан посредством штанги с выключателем.
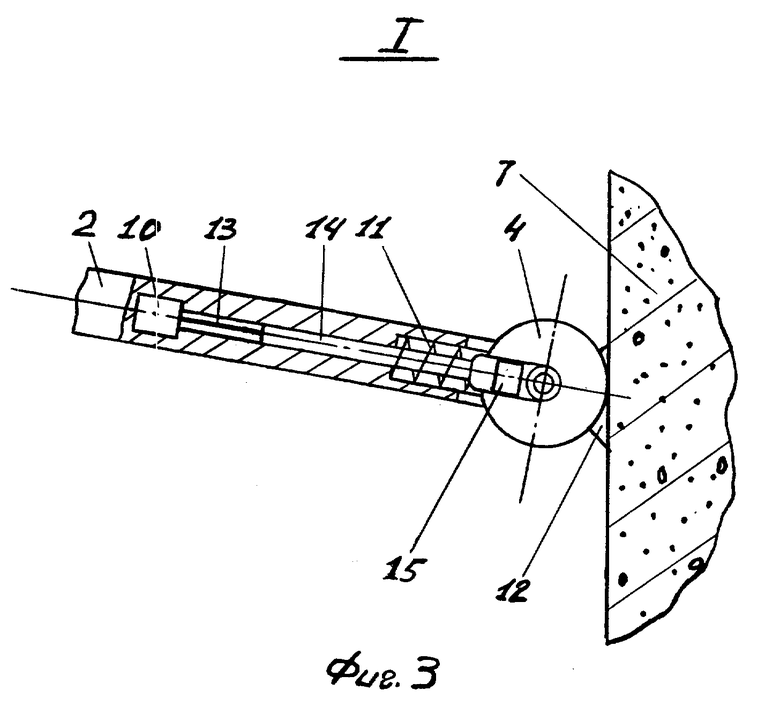
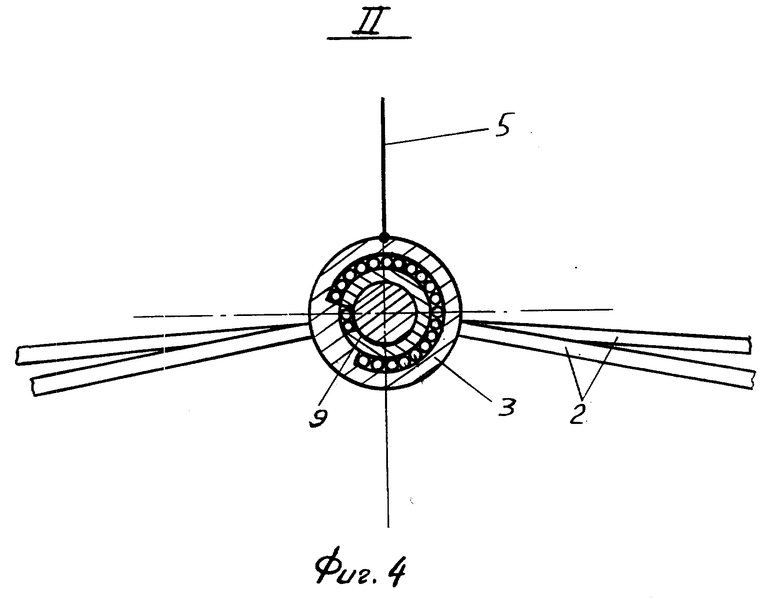
На фиг. 1 изображен агрегат, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - выноска I, на фиг. 1; на фиг. 4 - выноска II на фиг. 1.
Агрегат для дистанционного проведения работ содержит манипуляторы 1, две платформы 2, подвешенные на тросе 5 и шарнирно соединенные между собой одними концами благодаря шарнирному соединению 9, крепежный диск 3, связанный с тросом 5 и шарнирно прикрепленный к середине шарнирного соединения 9 платформ 2. Каждая платформа 2 состоит из двух частей, шарнирно связанных между собой в месте шарнирного соединения платформ 2, а каждый манипулятор 1 размещен с возможностью перемещения посредством колес 16 вдоль одной части соответствующей платформы 2, причем другая часть каждой платформы 2 размещена с возможностью контакта со стенками шахты 7 посредством упора 12 и снабжена подпружиненным стержнем 14, на одном конце которого установлены ролик 4 для взаимодействия со стенками шахты 7 и тормоз 15 для ролика, связанный посредством штанги 13 с выключателем 10. Часть платформы 2, несущая манипулятор 1, меньше части, взаимодействующей через упор 12 со стенками шахты 7. Каждая часть платформы 2 имеет П-образную форму, причем ролики 4 установлены на обоих концах одной из частей каждой платформы 2 и подпружинены пружинами сжатия 11 (всего на агрегате четыре ролика 4).
Агрегат для дистанционного проведения работ работает следующим образом.
После установки агрегата на нужном уровне шахты 7 включается перемещение манипуляторов 1 вдоль платформ 2 к их концам. При этом в свободном положении, когда агрегат может под действием троса 5 перемещаться вдоль шахты 7, манипуляторы 1 находятся возле шарнирного соединения 9 платформ 2, вследствие чего части платформ с роликами 4 перевешивают части с манипуляторами 1. В таком состоянии агрегата пружины 11 находятся в недеформированном состоянии, но находятся на грани деформации, что позволяет предотвращать заклинивание агрегата в шахте при толчках со стороны троса или других воздействиях на агрегат при передвижении его вдоль шахты 7.
По мере продвижения манипулятора 1 по платформе 2 к ее концу рычаг этой части платформы увеличивается, и в момент прохождения манипуляторами 1 середин соответствующих частей платформ 2 наступает равновесие обеих платформ 2, и одновременно с этим тормоза 15 фиксируют ролики 4, при этом манипуляторы 1 перемещаются дальше до полной остановки на концах платформ 2, а система начинает переходить в другое положение: части платформ 2 с манипуляторами 1 опускаются вниз, а части с роликами 4, не изменяя своего уровня расположения в шахте 7, перемещаются к стенкам шахты, вдавливая ролики 4 в платформы 2, которые в свою очередь перемещают стержни 14, связанные через штанги 13 с выключателями 10.
В момент контакта упоров 12 и стенок шахты 7 через штанги 13 срабатывают выключатели 10, и в зависимости от породы стен шахты 7 или других условий действие на агрегат со стороны троса 5 прекращается через определенный промежуток времени, необходимый для полной установки агрегата, с помощью реле времени. Причем это происходит только в случае, если все четыре выключателя сработали (т.к. выключатели соединены в электрической цепи последовательно). Это дает возможность избежать аварий, связанных с неправильной установкой агрегата или дефектами шахты 7. После этого агрегат готов к работе. В начальное положение агрегат приводится обратными операциями.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ РАСКАЧИВАНИЯ ГРУЗА | 1995 |
|
RU2091291C1 |
| УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ РАСКАЧИВАНИЯ ГРУЗА | 1995 |
|
RU2089483C1 |
| ДОМКРАТ | 1995 |
|
RU2127706C1 |
| НОЖ СО СТРЕЛЯЮЩИМ УСТРОЙСТВОМ | 1995 |
|
RU2102679C1 |
| СПИРАЛЬНАЯ ПЕРЕДАЧА | 1995 |
|
RU2121092C1 |
| ДОМКРАТ | 1996 |
|
RU2108960C1 |
| ГОРЕЛКА | 1996 |
|
RU2116573C1 |
| ВОЛНОВАЯ РЕМЕННАЯ ПЕРЕДАЧА | 1995 |
|
RU2105910C1 |
| ВОЛНОВАЯ ЗУБЧАТОРЕМЕННАЯ ПЕРЕДАЧА | 1995 |
|
RU2095666C1 |
| ВОЛНОВАЯ ПЕРЕДАЧА | 1995 |
|
RU2108503C1 |

Использование: для доставки манипуляторов в труднодоступные места. Сущность изобретения: агрегат для дистанционного проведения работ содержит подвешенные на тросе 5 две платформы 2 с манипуляторами 1, шарнирно соединенные между собой одними концами. Платформы 2 снабжены подпружиненными роликами 4 для взаимодействия со стенками шахты 7, а манипуляторы 1 размещены с возможностью перемещения посредством колес 16 вдоль платформ 2. 4 ил.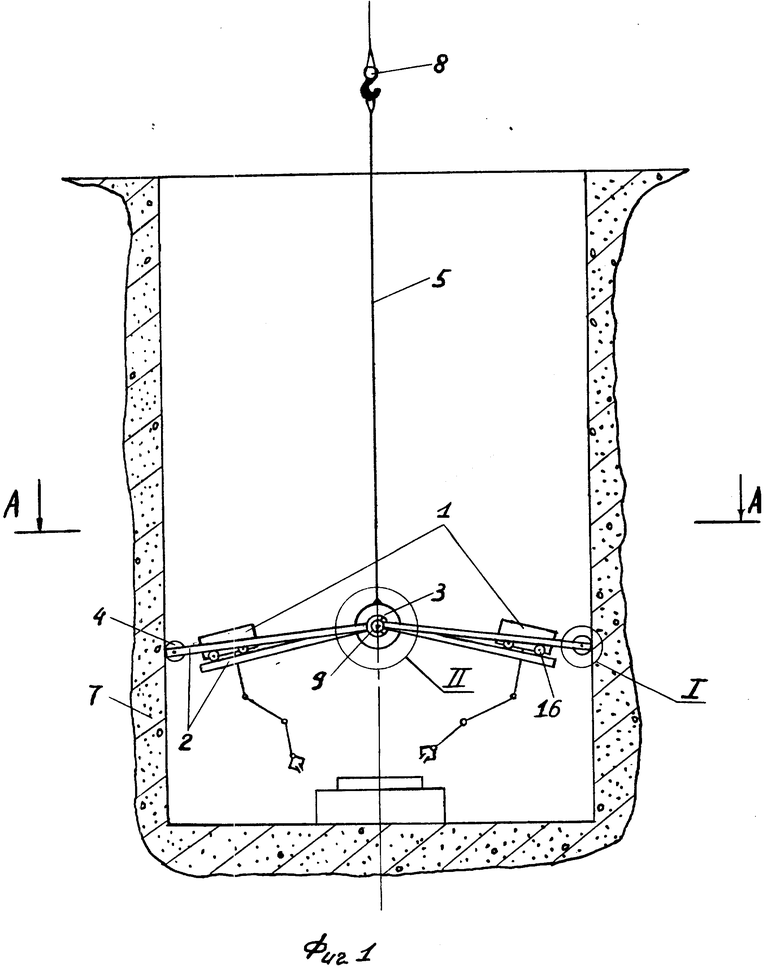
Агрегат для дистанционного проведения работ преимущественно в шахте, содержащий подвешенные на тросе две платформы с манипуляторами, шарнирно соединенные между собой одними концами, отличающийся тем, что он снабжен крепежным диском, связанным с упомянутым тросом и шарнирно прикрепленым к середине шарнирного соединения платформ, при этом каждая платформа состоит из двух частей, шарнирно связанных между собой в месте шарнирного соединения платформ, а каждый манипулятор размещен с возможностью перемещения посредством колес вдоль одной части соответствующей платформы, причем другая часть каждой платформы размещена с возможностью контакта со стенками шахты посредством упора и снабжена подпружиненным стержнем, на одном конце которого установлены ролик для взаимодействия со стенками шахты и тормоз для ролика, а другой конец связан посредством штанги с выключателем.
| SU, авторское свидетельство, 981174, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
