Изобретение относится к измерительной технике, а именно к способам определения геометрических параметров объектов и оптическим устройствам для осуществления этих способов. Изобретение может быть использовано в машиностроении для бесконтактного контроля правильности изготовления деталей со сложной геометрией поверхности.
Известны оптические способы и устройства для бесконтактного контроля формы деталей, основанных на принципах стереозрения, лазерной дальнометрии, с использованием структурированного подсвета [1].
Наиболее близким техническим решением к изобретению является способ определения формы детали, прототипа использующий структурированный подсвет исследуемой детали, при котором формируют световую плоскость, освещающую под заданным углом участок поверхности исследуемой детали в заданном сечении и, регистрируя изображение следа световой плоскости на поверхности детали с двух направлений, симметричных относительно световой плоскости, определяют геометрические параметры участка поверхности детали путем анализа этого изображения [2].
Известно также устройство для осуществления этого способа, содержащее щелевой проектор и два телевизионных регистратора изображения, расположенных симметрично относительно луча щелевого проектора под заданным углом [2].
Основным недостатком этого способа и такого устройства является то, что при таких измерениях не представляется возможным по видеоинформации, получаемой с участка поверхности исследуемой детали непосредственно, контролировать геометрические параметры сечения детали сложной формы и измерять координаты его точек.
Технической задачей изобретения является создание такого способа определения геометрических параметров детали, который обеспечивал бы получение информации в цифровом виде по сечению поверхности исследуемой детали, позволяющей контролировать геометрические параметры этого сечения (отклонение от эталона) и определять координаты точек сечения: а также создать такое устройство для осуществления этого способа, которое обеспечивало бы указанные требования.
Сущность способа заключается в том, что в известном способе определения геометрических параметров детали, при котором формируют световую плоскость, освещают ею под заданным углом участок поверхности детали в заданном сечении, наблюдают изображение следа световой плоскости на поверхности детали под углом к световой плоскости, регистрируют геометрические параметры этого изображения, по которым определяют с учетом углов освещения и наблюдения геометрические параметры участка поверхности детали, согласно изобретению, одновременно формируют по меньшей мере еще одну дополнительную световую плоскость, освещают ею другой участок поверхности детали в том же сечении, наблюдают изображение следа световой плоскости и поверхности детали под углом к дополнительной световой плоскости и регистрируют геометрические параметры этого изображения, по которым определяют геометрические параметры второго участка поверхности детали, кроме того, формируют коллимированный пучок лучей света, освещают им деталь на по меньшей мере двух из упомянутых участках поверхности одновременно в направлении, перпендикулярном заданному сечению, наблюдают теневое изображение детали, регистрируют геометрические параметры его контура, выделяют на этом контуре и на упомянутых изображениях следов световых плоскостей координаты идентичных точек поверхности, по взаимным соотношениям координат этих точек на разных изображениях определяют геометрические параметры взаимного расположения упомянутых участков поверхности детали.
Это позволяет получать полную информацию о геометрии поверхности сечения исследуемой детали и определять координаты взаимного расположения точек сечения, не наблюдаемых с одного направления.
В тех случаях, когда на теневом изображении не представляется возможным выделить необходимые идентичные точки с точками на изображениях следов световых плоскостей, например, из-за затенения и выступающими участками поверхности, предложено в область пересечения по меньшей мере двух из упомянутых световых плоскостей и коллимированного пучка лучей света поместить дополнительный объект, одновременно с регистрацией геометрических параметров следов световых плоскостей и контура теневого изображения детали регистрировать геометрические параметры изображений следов световых плоскостей и контура теневого изображения дополнительного объекта, выделять на этом контуре и на упомянутых изображениях следов световых плоскостей координаты идентичных точек поверхности дополнительного объекта, и по взаимным соотношениям координат этих точек на разных изображениях определять геометрические параметры взаимного расположения упомянутых участков поверхности детали.
Это обеспечивает геометрическую привязку точек разных контролируемых участков поверхности детали со сложным рельефом в тех случаях, когда форма детали не позволяет выделить на полученном контуре теневого изображения точки, идентичные точкам на изображении следов световых плоскостей на поверхности детали. Кроме того, дополнительный объект, если его характерные геометрические параметры известны, может служить средством оперативного метрологического контроля процесса измерений.
Целесообразно сканировать деталь световыми плоскостями по заданным сечениям детали, регистрировать координаты сканирования, в каждом сечении определять геометрические параметры участков поверхности детали, выделять координаты идентичных точек и по взаимным соотношениям координат этих точек в различных заданных сечениях определять геометрические параметры взаимного расположения участков поверхности в разных сечениях.
Это позволяет получать полную информацию о форме поверхности исследуемой детали и определять координаты точек поверхности детали.
Указанная задача изобретения решается также тем, что в устройство для осуществления предложенного способа, включающее щелевой проектор, объектив и устройство регистрации параметров изображения, согласно изобретению, дополнительно введены по меньшей мере, один дополнительный щелевой проектор, расположенный в одной плоскости с исходным щелевым проектором, по меньшей мере один дополнительный объектив, расположенный своей осью под заданным углом к плоскости расположения щелевых проекторов, и по меньшей мере одно дополнительное устройство регистрации параметров изображения, расположенное в плоскости изображения дополнительного объектива, кроме того, дополнительно введены установленные последовательно на оси, перпендикулярной плоскости расположения щелевых проекторов, источник света, коллиматор пучка лучей света, преобразующая оптическая система, еще одно устройство регистрации параметров изображения, а также запоминающее устройство, соединенное с упомянутыми устройствами регистрации параметров изображения, и вычислительное устройство, соединенное с запоминающим устройством.
Такое устройство позволяет получать информацию о геометрии поверхности сечения исследуемой детали в цифровом виде.
Устройство может дополнительно содержать устройство сканирования плоскости заданного сечения по поверхности детали, устройство регистрации координат сканирования и устройство управления, соединенное с устройством сканирования и устройством регистрации координат сканирования, при этом вычислительное устройство подключается к устройству регистрации координат сканирования и устройству управления.
Такое устройство позволяет оперативно контролировать различные сечения исследуемой детали и получать полную информацию о геометрии детали в целом.
Целесообразно, чтобы устройство сканирования плоскости заданного сечения по поверхности детали было выполнено в виде захвата детали, имеющего ось вращения и привод, а устройство регистрации координат сканирования выполнено в виде датчика угла поворота, механически связанного с упомянутым захватом детали, при этом ось вращения установления в заданном сечении параллельно оси щелевых проекторов, так, чтобы их щели были ориентированы параллельно радиусу.
Такое устройство позволяет обеспечить оптимальную траекторию сканирования для осесимметричных деталей.
Целесообразно, чтобы щелевой проектор включал проекционный объектив, щель и импульсную лампу трубчатого типа с отражателем, синхронизированную с устройством регистрации параметров изображения.
Такое устройство проектора позволяет наилучшим образом использовать энергию излучения в момент регистрации параметров изображения.
Щелевой проектор может быть выполнен в виде лазера и установленной на его выходе оптической системы, включающей цилиндрические линзы.
Это позволяет получить оптимальную толщину световой плоскости и максимально использовать энергию источника света.
На фиг. 1 дано схематичное изображение положения световых пучков и плоскостей регистрации относительно исследуемой детали, согласно заявляемому способу; на фиг. 2 - способ определения геометрических параметров детали с использованием дополнительного объекта; на фиг. 3 - схема одного из возможных вариантов предлагаемого устройства; на фиг. 4 - схема одного из вариантов предлагаемого устройства с использованием сканирования плоскости сечения по поверхности детали; на фиг. 5 - схема одного из примеров конкретного выполнения предлагаемого устройства, содержащего устройство сканирования в виде захвата исследуемой детали; на фиг. 6 - схема возможного устройства щелевого проектора; на фиг. 7 - схема одного из возможных вариантов щелевого проектора, выполненного в виде лазера и системы цилиндрических линз.
Возможный вариант способа определения геометрических параметров детали осуществляется следующим образом. Участок поверхности исследуемой детали 1 (фиг. 1) в заданном сечении освещается световой плоскостью 2, которая образует световой след 3 на поверхности детали. Такие световые плоскости 2' могут освещать деталь с нескольких направлений в плоскости заданного сечения, образуя световые следы 3' на разных участках поверхности. Изображения следов световых плоскостей 3 и 3' формируются в некоторых плоскостях регистрации 4 и 4', нормали к которым расположены под заданным углом α к указанным световым плоскостям. В плоскостях регистрации 4 и 4' геометрические параметры изображения следов световых плоскостей регистрируются одним из известных способов, например, кино- , фоторегистрации или телевизионной видеозаписи. По геометрическим параметрам зарегистрированного изображения 4 или 4' с учетом угла α можно определить геометрию рассматриваемого участка поверхности детали. Кроме того, исследуемая деталь освещается коллимированным пучком лучей 5, который должен быть перпендикулярен заданному сечению и проходить через участки поверхности, освещаемые световыми плоскостями 2 и 2'. Тогда на теневом изображении детали в плоскости 6 можно выделить точки, идентичные точкам на изображениях следов световых плоскостей на плоскостях 4 или 4'. Например, на фиг. 1 такими точками соответственно являются точки 7 и 7', а также 8 и 8', 9 и 9'. По взаимным соотношениям координат этих точек на изображении 6 и координат соответствующих точек световых следов можно определять геометрические параметры взаимного расположения всех точек различных участков поверхности детали в заданном сечении.
Технический эффект изобретения состоит в следующем. В способе определения геометрических параметров детали, выбранном в качестве прототипа, контролируется геометрия только одного участка поверхности детали, освещаемого световой плоскостью, но не определяются параметры ее толщины. Предложенный способ позволяет определять геометрию любого участка поверхности контролируемой детали в заданном сечении, а также определять координаты взаимного расположения этих участков, например, толщину детали в любом месте ее сечения. Таким образом, способ позволяет получать более полную информацию о геометрических параметрах сечения исследуемой детали.
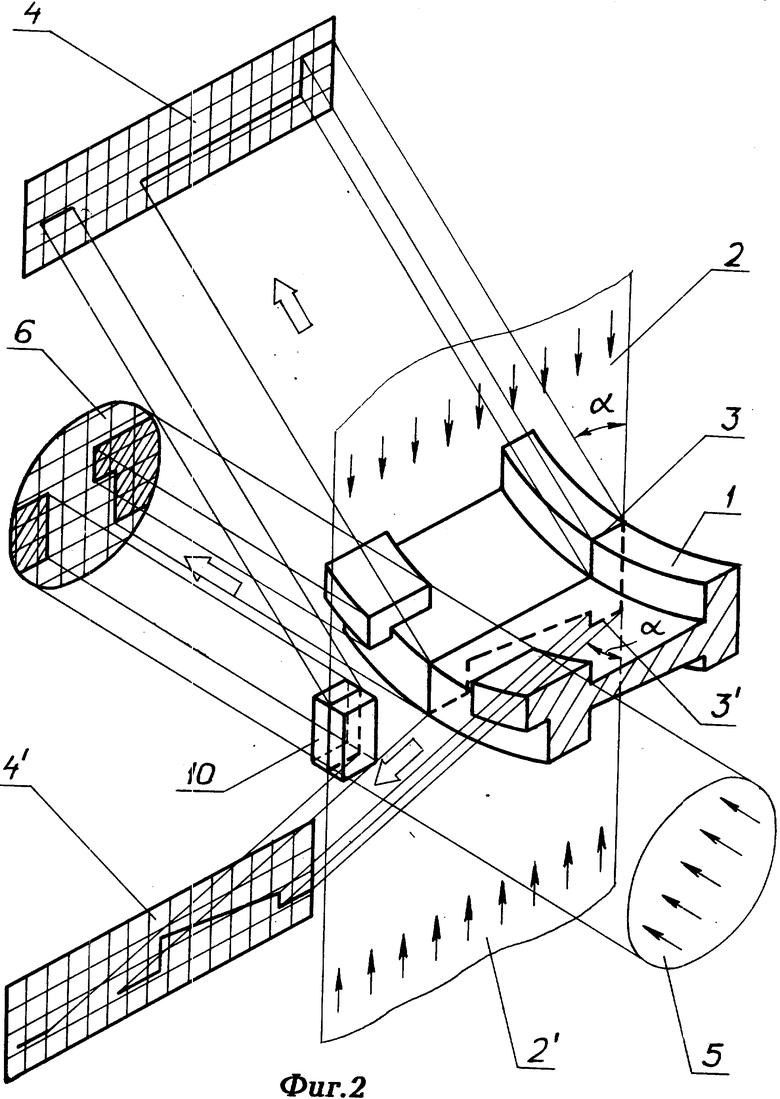
В ряде случаев на детали сложной формы выступающие участки поверхности не позволяет получить теневое изображение, на котором можно было бы выделить точки присутствующие одновременно и на обоих изображениях следов световых плоскостей. Тогда целесообразно в область пересечения всех световых плоскостей, освещающих исследуемую деталь, и коллимированного пучка лучей света поместить дополнительный объект 10, на котором можно выделить идентичные точки (фиг. 2). Тогда, регистрируя одновременно геометрические параметры изображений следов световых плоскостей и теневого изображения детали и дополнительного объекта, возможно по взаимным соотношениям координат точек на различных изображениях дополнительного объекта установить параметры взаимного расположения различных участков исследуемой детали.
Если к тому же геометрические параметры дополнительного объекта известны, то, определяя координаты точек изображений следов световых плоскостей на поверхности дополнительного объекта и, сопоставляя их с известными параметрами, можно производить оперативный метрологический контроль процесса измерения.
Таким образом, расширяется диапазон возможных конфигураций исследуемых деталей и повышается метрологический уровень измерений.
Если исследуемую деталь сканировать световыми плоскостями по заданным сечениям и регистрировать координаты сканирования, можно определять геометрические параметры всей детали.
Технический эффект изобретения состоит в следующем. Информации, получаемой при контроле детали в одном сечении не всегда достаточно для того, чтобы полностью определить ее форму. Кроме того, возможен случай, когда неправильная установка детали относительно световых плоскостей может привести к тому, что деталь будет контролировать в другом сечении, нежели требуется. Сканирование детали световыми плоскостями по различным сечениям позволяет получать информацию о форме поверхности детали в целом и установить координаты точек на всей поверхности детали. Это дает не только более полную информацию об исследуемой детали, но и позволяет снизить погрешность от возможной неправильной установки детали, что также повышает метрологический уровень измерений.
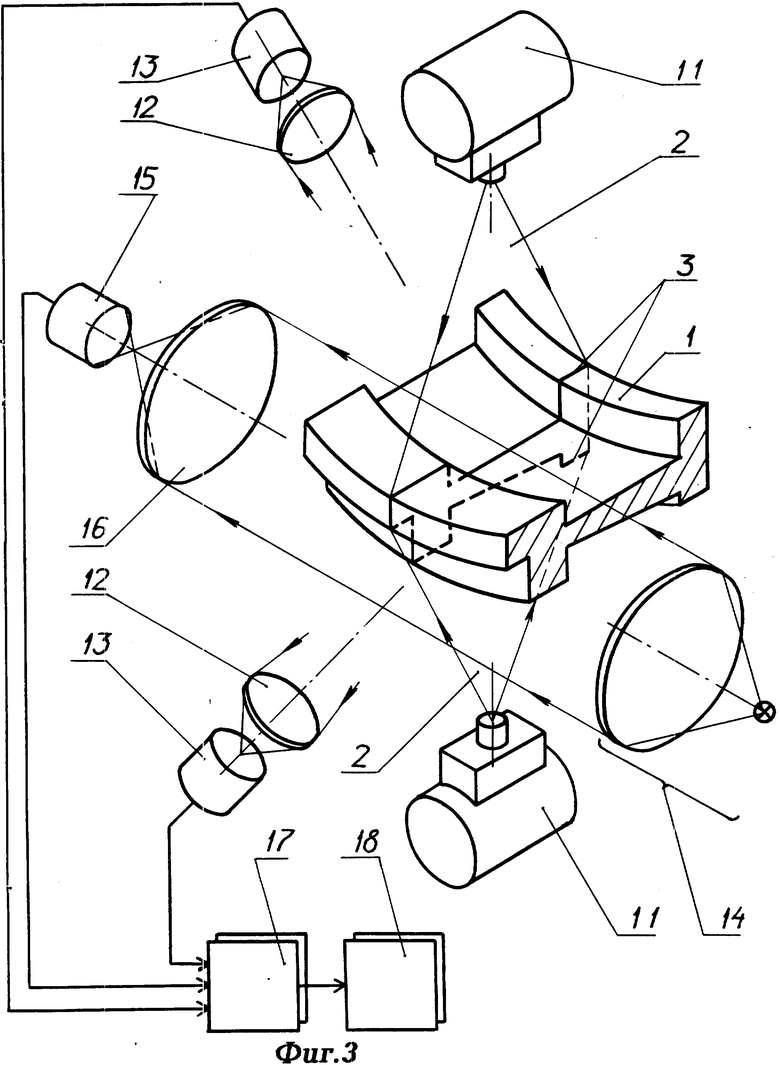
На фиг. 3 изображена схема возможного варианта конкретного выполнения предложенного устройства. На схеме показаны: контролируемая деталь 1, световые плоскости 2, следы световых плоскостей на поверхности детали 3, щелевые проекторы 11, объективы 12, устройства регистрации параметров изображения 13, коллиматор 14, устройство регистрации параметров изображения 15, преобразующая оптическая система 16, запоминающее устройство 17 и вычислительное устройство 18.
Устройство работает следующим образом. Исследуемая деталь 1 освещается с различных сторон в плоскости заданного сечения световыми плоскостями 2, создаваемыми щелевыми проекторами 11. Изображения следов 3 световых плоскостей на поверхности детали формируются посредством объективов 12, оси которых расположены под заданными углами α к плоскости расположения щелевых проекторов, в плоскостях анализа устройств 13 регистрации параметров изображения (в качестве таких устройств могут быть использованы, например, телевизионные камеры или матричные фотоприемники). Кроме того, исследуемая деталь освещается коллимированным пучком света при помощи коллиматора 14, ось которого перпендикулярна плоскости расположения щелевых проекторов. Теневое изображение детали формируется в плоскости анализа еще одного устройства регистрации параметров изображения 15 при помощи преобразующей оптической системы 16, расположенной соосно коллиматору 14. Электрические сигналы с устройств регистрации параметров изображения 13, 15, несущие информацию о геометрических параметрах изображений следов световых плоскостей на различных участках поверхности детали 1 в плоскости заданного сечения и ее теневого изображения, поступают в запоминающее устройство 17, подключенное к вычислительному устройству 18, которое производит обработку информации. Устройствами для регистрации изображений 13, 15 могут служить кино- и фотокамеры, а также телевизионные видеокамеры или матричные фотоприемники, соединенные либо с видеозаписывающей аппаратурой 17, либо с электронной системой 17 непосредственной оцифровки видеоизображений, связанной с вычислительным устройством 18. Первичная обработка информации заключается в установлении связи между изображениями следов световых плоскостей на различных участках поверхности детали в плоскости заданного сечения (определение координат точек изображения), а вторичная обработка обеспечивает определение геометрических параметров детали в заданном сечении. Вычисляются также отклонения измеренных параметров от номинальных, хранящихся в виде цифровой математической модели сечения детали в памяти вычислительного устройства.
Технический эффект изобретения состоит в том, что предложенное устройство по сравнению с устройством-прототипом обладает расширенными возможностями: возможностью определения геометрических параметров не только отдельно взятого участка поверхности исследуемой детали, но и получения информации в цифровом виде по всем сечениям и поверхности детали, а также измерения параметров толщины детали в сечениях.
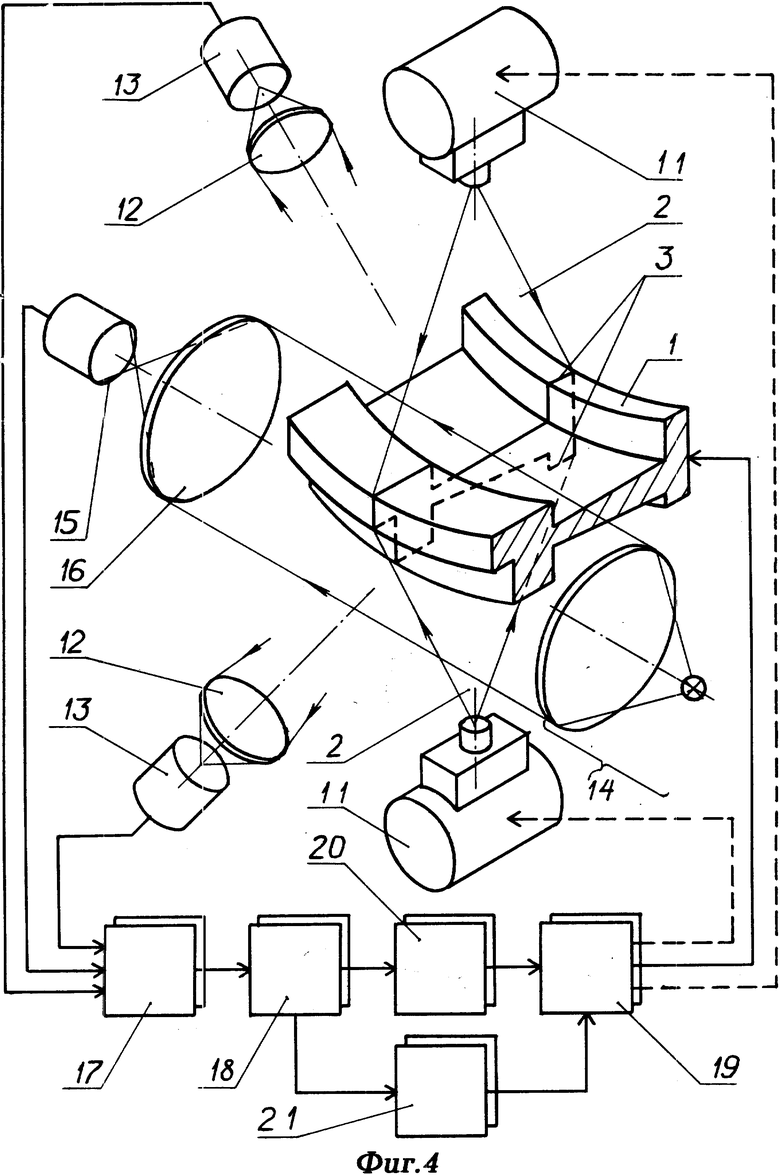
На фиг. 4 изображена схема другого примера конкретного выполнения предложенного устройства. На схеме показаны: контролируемая деталь 1, световые плоскости 2, следы световых плоскостей на поверхности детали 3, щелевые проекторы 11, объективы 12, устройства регистрации параметров изображения 13, коллиматор 14, устройство регистрации параметров изображения 15, преобразующая оптическая система 16, запоминающее устройство 17, вычислительное устройство 18, устройство сканирования 19 плоскости заданного сечения по поверхности детали устройство регистрации 20 координат сканирования и устройство управления 21.
Устройство в таком варианте работает следующим образом. Исследуемая деталь 1 освещается с различных сторон в плоскости заданного сечения световыми плоскостями 2, создаваемыми щелевыми проекторами 11. Следы 3 световых плоскостей на поверхности детали изображаются посредством объективов 12, оси которых расположены под заданными углами α к плоскости расположения щелевых проекторов, в плоскости анализа устройств 13 регистрации параметров изображения. Кроме того, исследуемая деталь освещается коллимированным пучком света при помощи коллиматора 14, ось которого перпендикулярна плоскости расположения щелевых проекторов. Теневое изображение детали формируется в плоскости анализа еще одного устройства регистрации параметров изображения 15 при помощи преобразующей оптической системы 16, расположенной соосно коллиматору 14. Электрические сигналы с устройств регистрации параметров изображения 13, 15 несущие информацию о геометрических параметрах изображений следов световых плоскостей на различных участках поверхности детали 1 в плоскости заданного сечения и ее теневого изображения, поступают в запоминающее устройство 17, подключенное к вычислительному устройству 18. Устройство 19 сканирования плоскости заданного сечения по поверхности детали осуществляет перемещение детали относительно плоскости расположения щелевых проекторов 11, если размеры детали невелики, либо, если деталь крупногабаритная, перемещаются щелевые проекторы относительно неподвижной детали на заданный шаг сканирования. Информация о взаимном перемещении детали и плоскости расположения щелевых проекторов поступает с устройства регистрации координат сканирования 20 в вычислительное устройство. Вычислительное устройство производит обработку информации, поступающей с устройства 17, определяя геометрические параметры детали в заданном сечении и с устройства 20, связывая воедино результаты измерения в различных сечениях детали и выдает информацию, необходимую для работы управляющего устройства 21, осуществляющего управление устройством сканирования плоскости заданного сечения.
Вычислительное устройство по результатам измерений может представлять информацию о форме поверхности детали в виде топологии поверхности, а также вычислять отклонения измеренных параметров от номинальных, хранящих в виде цифровой математической модели детали в памяти вычислительного устройства.
Технический эффект изобретения заключается в том, что предложенное устройство позволяет получать информацию о форме поверхности детали в целом и определять координаты точек поверхности.
Дополнительный технический эффект состоит в том, что устройство, позволяя контролировать форму поверхности детали во множестве различных сечений, имеет существенно меньшую погрешность, возникающую от возможной неправильной установки исследуемой детали, чем устройство, осуществляющее контроль только в одном сечении.
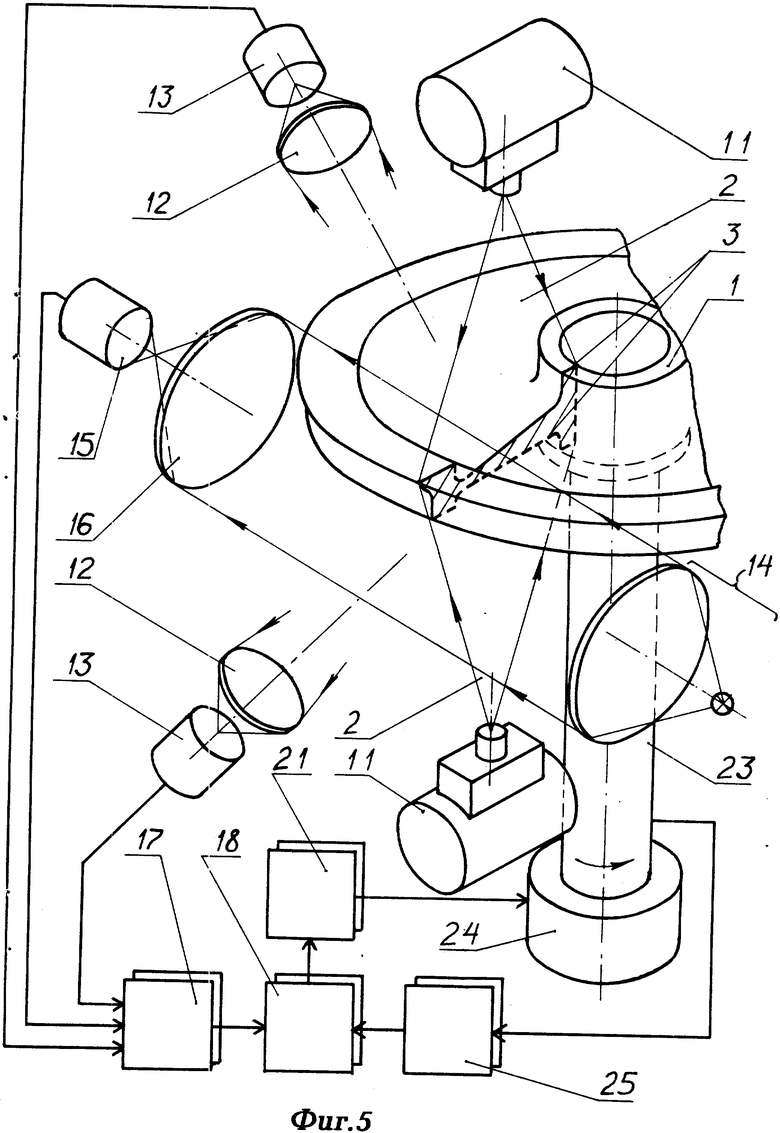
На фиг. 5 представлена еще одна схема конкретного выполнения предложенного устройства. На схеме показаны: контролируемая деталь 1, световые плоскости 2, следы световых плоскостей на поверхности детали 3, щелевые проекторы 11, объективы 12, устройства регистрации параметров изображения 13, коллиматор 14, устройство регистрации параметров изображения 15, преобразующая оптическая система 16, запоминающее устройство 17, вычислительное устройство 18, устройство управления 21, захват детали 22, содержащий ось вращения 23, привод 24, выполняющий функцию устройства сканирования плоскости заданного сечения по поверхности детали, датчик угла поворота 25.
Такое устройство работает следующим образом. Исследуемая деталь 1 освещается с различных сторон в плоскости заданного сечения световыми плоскостями 2, создаваемыми щелевыми проекторами 11. Следы 3 световых плоскостей на поверхности детали изображаются посредством объективов 12, оси которых расположены под заданными углами α к плоскости расположения щелевых проекторов, в плоскости анализа устройства 13 регистрации параметров изображения. Кроме того, исследуемая деталь освещается коллимированным пучком света при помощи коллиматора 14, ось которого перпендикулярна плоскости расположения щелевых проекторов. Теневое изображение детали формируется в плоскости анализа еще одного устройства регистрации параметров изображения 15 при помощи преобразующей оптической системы 16, расположенной соосно коллиматору 14. Электрические сигналы с устройства регистрации параметров изображения 13, 15, несущие информацию о геометрических параметрах изображений следов световых плоскостей на различных участках поверхности детали 1 в плоскости заданного сечения и ее теневого изображения, поступают в запоминающее устройство 18. Устройство сканирования плоскости заданного сечения по поверхности детали, выполненное в виде захвата детали 22, имеющего ось вращения 23 и привод 24, осуществляет поворот детали относительно плоскости расположения щелевых проекторов 11 на заданный угол, причем ось вращения детали установлена в заданном сечении параллельно оси щелевых проекторов, а их щели ориентированы параллельно радиусу детали. Информация о положении детали относительно плоскости расположения щелевых проекторов поступает с датчика угла поворота 25, механически связанного с захватом детали и осуществляющего функцию устройства регистрации координат сканирования, в вычислительное устройство 18. Вычислительное устройство производит обработку информации, поступающей с устройства 17, определяет геометрические параметры детали в заданном сечении и с датчика 25, связывая воедино результаты измерения в различных сечениях детали и выдает информацию, необходимую для работы управляющего устройства 21, осуществляющего управление работой привода 24. Вычислительное устройство по результатам измерений может представлять информацию о форме поверхности детали в виде топологии поверхности, а также вычислять отклонения измеренных параметров от номинальных хранящихся в виде цифровой математической модели детали в памяти вычислительного устройства.
Технический эффект изобретения заключается в следующем. При контроле геометрических параметров осесимметричных деталей чаще всего следует знать геометрию их поверхности в различных диаметральных сечениях. Наиболее рациональное сканирование плоскости заданного сечения по поверхности исследуемой детали в этом случае - вращение детали относительно оси, являющейся осью ее симметрии и лежащей в плоскости заданного сечения. Предложенное устройство обеспечивает указанное требование.
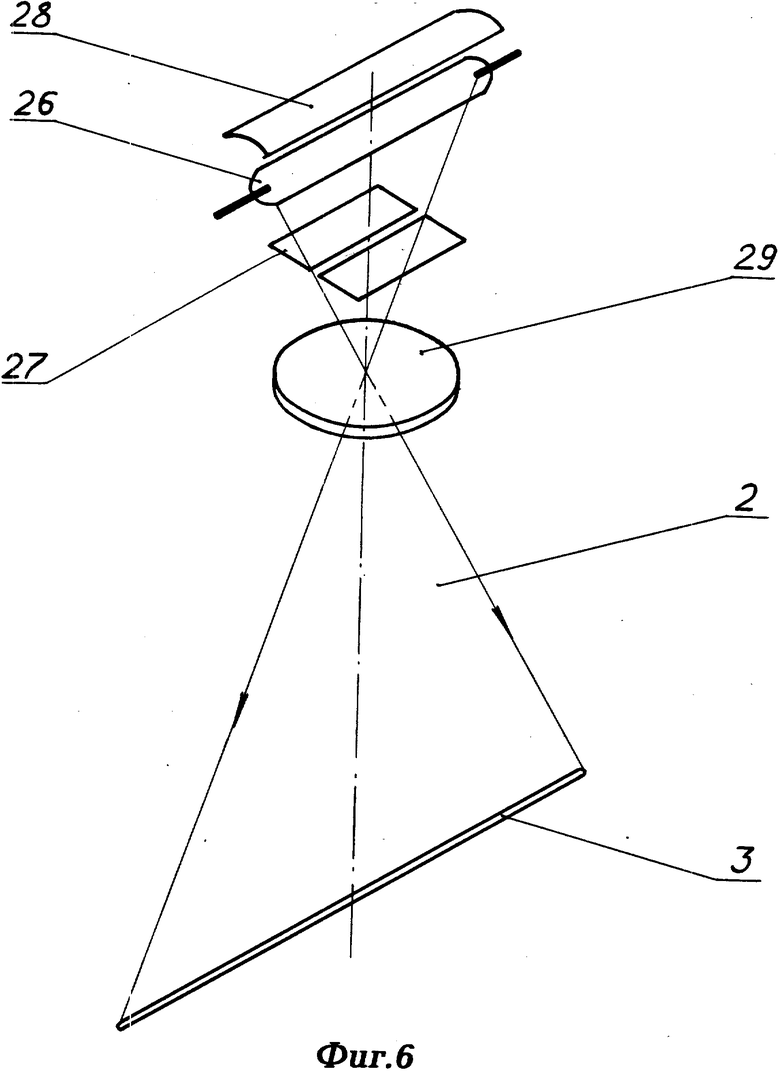
На фиг. 6 изображена схема возможного устройства щелевого проектора. На схеме показаны: световая плоскость 2, след световой плоскости на поверхности детали 3, лампы трубчатого типа 26, щель 27, отражатель 28 и проекционный объектив 29.
Устройство работает следующим образом. Свет от лампы трубчатого типа 26 освещает узкую щель 27. Для наилучшего использования света лампы позади нее расположен зеркальный отражатель 28. Проекционный объектив 29 изображает щель 27 в виде следа 3 световой плоскости 2 на поверхности детали. Лампа 26 может быть как непрерывного действия, так и импульсная, синхронизированная с устройством регистрации параметров изображения.
Технический эффект изобретения заключается в том, что использование лампы трубчатого типа позволяет освещать щель большой протяженности с минимальными потерями энергии, кроме того, если эта лампа импульсная, то синхронизация ее с устройством регистрации изображения позволяет получать максимальный поток излучения в момент регистрации параметров изображения.
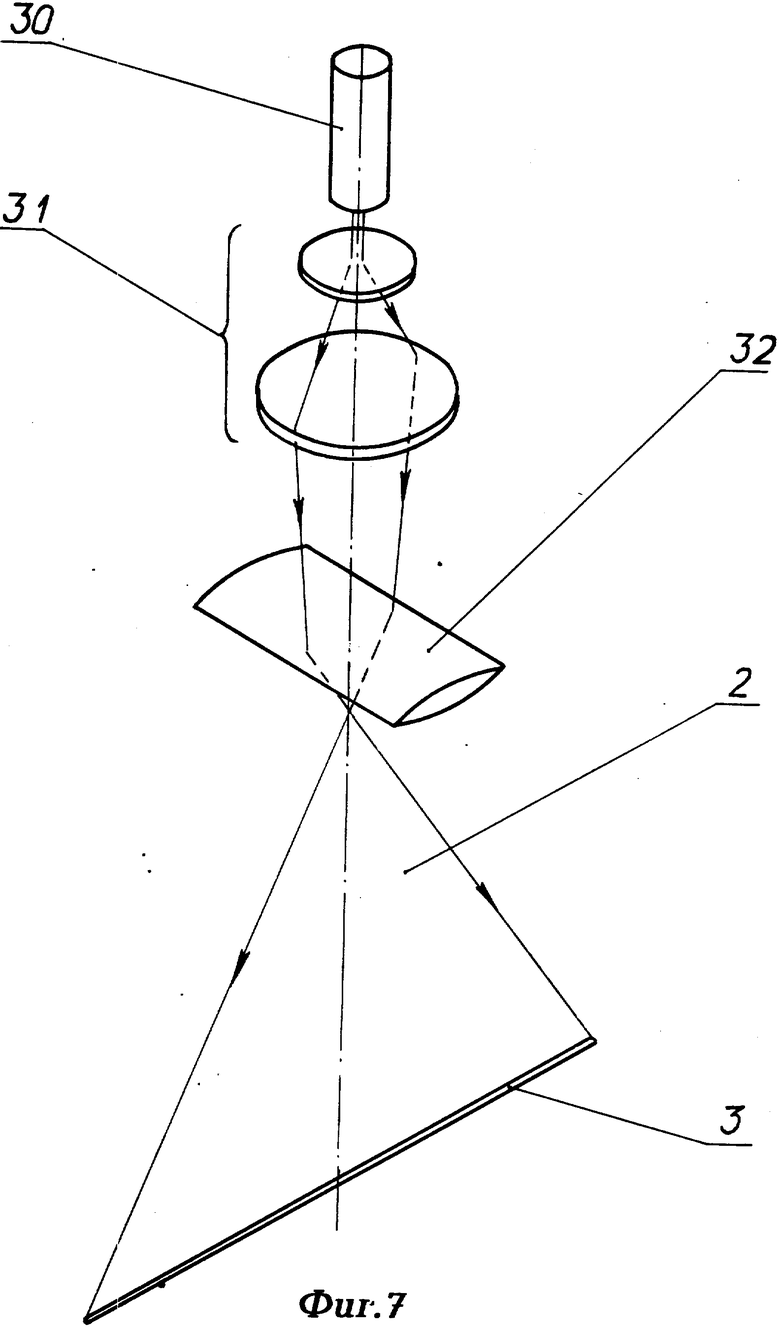
На фиг. 7 изображена схема возможного варианта выполнения щелевого проектора. На схеме показаны: световая плоскость 2, след световой плоскости на поверхности детали 3, лазер 30, фокусирующая система 21 и цилиндрическая линза 32.
Здесь узкий пучок параллельных лучей от лазера 30 проходит двухкомпонентную фокусирующую систему 31, фокусирующую излучение лазера на поверхности детали. Цилиндрическая линза 32, расположенная на выходе фокусирующей системы, "растягивает" свет в одном направлении, формируя световую плоскость 2, образующую световой след в виде тонкой линии 3 на поверхности детали.
Технический эффект изобретения состоит в следующем. Свет от обычных источников света (ламп накаливания, газоразрядных ламп и др.) распространяется в пространстве во всех направлениях, поэтому невозможно при их использовании сформировать направленную световую плоскость без потерь энергии. Формируя при помощи предложенного устройства световую плоскость из узкого направленного пучка лучей лазера добиваемся практически полного использования энергии излучения источника.
Дополнительный технический эффект изобретения заключается в том, что высокая монохроматичность используемого лазерного излучения позволяет производить эффективную спектральную фильтрацию при приеме излучения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МАЛОУГЛОВОЙ ТОПОГРАФИИ (ВАРИАНТЫ) | 1997 |
|
RU2119659C1 |
| СПОСОБ РАДИАЦИОННОГО ИССЛЕДОВАНИЯ ВНУТРЕННЕЙ СТРУКТУРЫ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2199109C2 |
| РЕФЛЕКТОМЕТР | 1994 |
|
RU2091762C1 |
| СПОСОБ КОНТРОЛЯ РЕЛЬЕФА ПОВЕРХНОСТИ | 2007 |
|
RU2368869C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СОСТАВА И СТРУКТУРЫ НЕОДНОРОДНОГО ОБЪЕКТА (ВАРИАНТЫ) | 1997 |
|
RU2119660C1 |
| ИОННЫЙ МИКРОПРОЕКТОР И СПОСОБ ЕГО НАСТРОЙКИ | 1997 |
|
RU2126188C1 |
| ЛАЗЕРНОЕ УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ПОЛЯ МИКРООБЪЕКТОВ С ЛУЧЕВЫМ ВОЗДЕЙСТВИЕМ (ВАРИАНТЫ) | 2002 |
|
RU2199729C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ТРЕХМЕРНОГО ОБЪЕКТА | 2002 |
|
RU2260173C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ТОЛЩИНЫ ПОКРЫТИЙ РЕНТГЕНОФЛУОРЕСЦЕНТНЫМ МЕТОДОМ | 1992 |
|
RU2112209C1 |
| УСТРОЙСТВО С УЛЬТРАФИОЛЕТОВЫМ ЛАЗЕРОМ ДЛЯ ОТОБРАЖЕНИЯ СТАТИЧЕСКИХ И ДИНАМИЧЕСКИХ ЦВЕТНЫХ ИЗОБРАЖЕНИЙ НА ФЛУОРЕСЦИРУЮЩЕМ ЭКРАНЕ | 2002 |
|
RU2202818C1 |
Использование: измерительная техника, в частности оптические измерительные средства. Сущность изобретения: формируют по меньшей мере две световые плоскости 2 и 2, освещающие исследуемую деталь 1 в заданном сечении, наблюдают и регистрируют геометрические параметры изображения следов 3.3 указанных плоскостей на различных участках поверхности детали 7, по которым определяют геометрические параметры этих участков поверхности, формируют коллимированный пучок лучей света, освещают им деталь 1 в направлении, перпендикулярном заданному сечению, наблюдают и регистрируют геометрические параметры теневого изображения детали и по результатам их анализа определяют геометрические параметры взаимного расположения участков поверхности детали. Устройство, реализующее способ, содержит вычислительное устройство, обеспечивающее управление и обработку результатов. 2 с. и 5 з.п. ф-лы, 7 ил.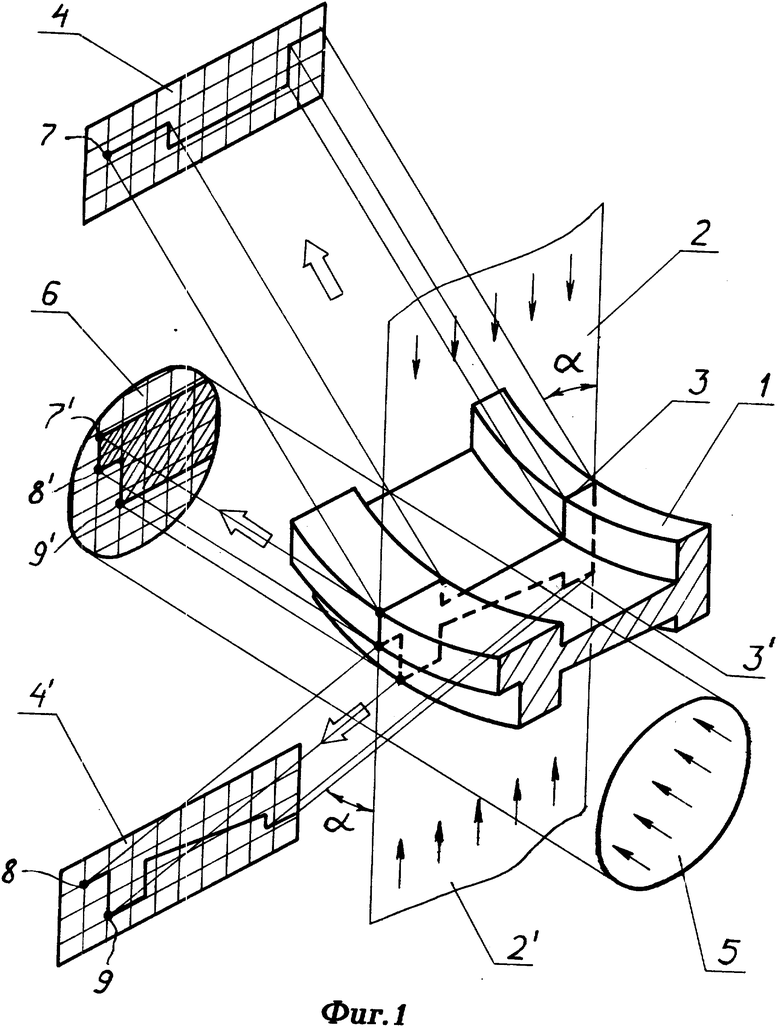
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Катис Г.П | |||
| Обработка визуальной информации | |||
| - М.: Машиностроение, 1990, с | |||
| Прибор для подогрева воздуха отработавшими газам и двигателя | 1921 |
|
SU320A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
