Изобретение относится к электрическим машинам, в частности, к линейным шаговым электродвигателям, которые находят широкое применение в дискретном электроприводе.
Известен шаговый электродвигатель, состоящий из многофазного статора с цилиндрическими обмотками, полюсами между ними, ферромагнитными кольцевыми элементами и подшипниками скольжения, а также якоря, расположенного внутри статора и имеющего чередующиеся магнитные втулки. Для увеличения силы тяги полюсы статора снабжены наконечниками, внутренний диаметр которых равен наружном диаметру кольцевых элементов, которые по длине охватывают по одному элементу магнитопровода смежных фаз, а между этими элементами размещены подшипники скольжения /1/.
Данная конструкция имеет увеличенные габариты на единицу ходя якоря.
В качестве прототипа выбран линейный шаговый электродвигатель, состоящий из индуктора с аксиально расположенными полюсами, обмоткой, чередующимися магнитными и немагнитными кольцами, прилегающими друг к другу, и якоря, имеющего свои магнитные и немагнитные кольца и антифракционные элементы. Между магнитными кольцами индуктора установлены дополнительные прокладки, с помощью которых достигается смещение зубцовой зоны одной фазы относительно другой /2/.
Недостатки прототипа - повышенные осевые размеры двигателя, при недоиспользованных возможностях увеличения хода подвижной части.
Цель изобретения - уменьшение осевых габаритов при увеличение хода якоря.
Цель достигается тем, что осевые длины магнитных и немагнитных элементов статора определяются чередованием относительных чисел 3 и 1, а осевые длины чередующихся магнитных и немагнитных элементов якоря определяются рядом относительных чисел: 3, 1, 3, 2, 3, 1, 3, 2 и т.д., или
3, 1, 3, 1, 3, 2, 3, 1, 3, 1, 3, 2 и т.д., или
3, 1, 3, 1, 3, 1, 3, 2, 3, 1, 3, 1, 3, 1, 3, 2 и т.д.
На фиг. 1 представлен общий вид линейного электродвигателя; на фиг.2 - основной вариант конструкции; на фиг.3, 4 - предлагаемый вариант конструкции.
Двигатель на фиг.1 состоит из статора и якоря. Статор содержит: шпильки 1, на которые надеты магнитные - основания 2, полюсы 3, немагнитные втулки 4, шпильки 5, на которые надеты магнитные обручи 6, немагнитные шайбы 7, намагничивающие катушки 8. Якорь содержит: стержень 9, на котором крепятся магнитные гайки 10, немагнитные гайки 11, торцевые гайки 12. Для надежного изолирования провода катушки 8 от корпуса 6, предусмотрены диэлектрические ободы 13. Магнитные и немагнитные элементы статора по внутреннему диаметру имеют одинаковый размер, а немагнитные гайки 11 якоря по наружному диаметру выступают по отношению к магнитным гайкам 10 якоря на величину воздушного зазора. Пространство между магнитопроводами намагничивающих катушек 8 заполняется смазкой. Для наполнения данных объемов конструкции содержит масленки 14.
Двигатель работает следующим образом.
При отсутствии токов в катушках 8 двигателя якорь занимает произвольное положение в пространстве в пределах рабочего хода. При поочередной (прямой последовательности) подаче токов в катушки 8 якорь приходит в движение в прямом направлении; при очередной (обратной последовательности) подаче токов в катушки 8 якорь приходит в движение в обратном направлении. При этом частота подаваемых импульсов тока в катушки 8 определяется скорость движения якоря. При одновременной подаче тока во все катушки 8 двигателя якорь затормаживается.
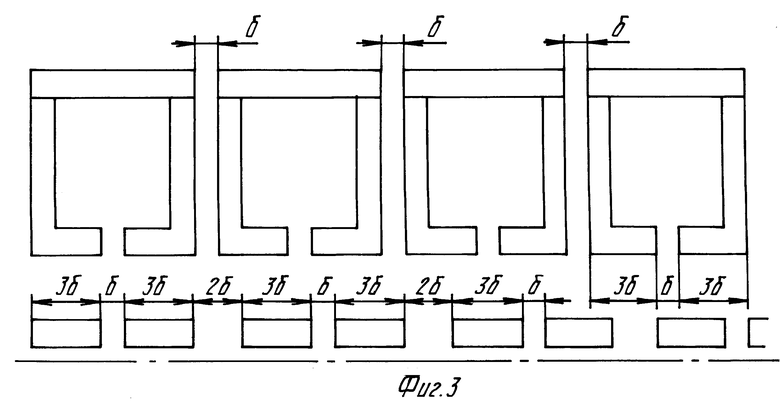
Рассмотрим реализацию осевых размеров магнитных и немагнитных элементов статора и якоря электродвигателя. Обозначим относительные осевые длины немагнитных элементов статора - δ (фиг.2), немагнитные элементы представлены воздушными промежутками. Относительные осевые длины магнитных элементов статора равны 3δ . При условии того, что осевые длины: немагнитных элементов якоря равны δ , а магнитных элементов якоря - 3δ , то для смещения зубцовой зоны одной фазы относительно другой расстояние между магнитопроводами намагничивающих катушек должно равняться 2δ . Такая конструкция представляет собой основной вариант.
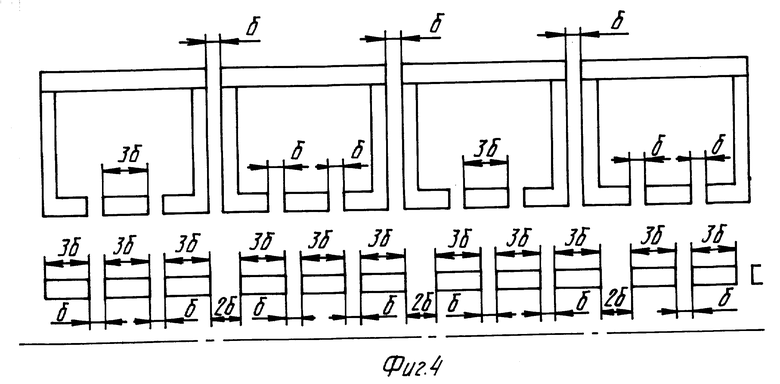
Предлагаемая конструкция (фиг.3) содержит немагнитные и магнитные элементы статора с длинами, соответственно равными δ и 3δ , а осевые длины немагнитных м магнитных элементов якоря определяются рядом относительных чисел: 3, 1, 3, 2, 3, 1, 3, 2, 3, 1 и т.д., где 3 - относительные длины магнитных элементов; 1, 2 - относительные длины немагнитных элементов. Такая конструкция предусматривает расстояние между магнитопроводами намагничивающих катушек, равное относительной длине немагнитного элемента δ .
Если магнитопровод одной намагничивающей катушки статора имеет два немагнитных элемента (фиг. 4), то осевые длины магнитных и немагнитных элементов якоря определяются рядом относительных чисел: 3, 1, 3, 1, 3, 2, 3, 1, 3, 1, 3, 2 и т.д. В конструкции, содержащей три немагнитных элемента, осевые длины магнитных и немагнитных элементов якоря определяются рядом относительных чисел: 3, 1, 3, 1, 3, 1, 3, 2, 3, 1, 3, 1, 3, 1, 3, 2 и т.д.
В отличие от прототипа у предлагаемого линейного электродвигателя осевые длины магнитных и немагнитных элементов статора определяются чередованием относительных чисел 3 и 1, а осевые длины чередующихся магнитных и немагнитных элементов якоря, например, для варианта с одним немагнитным элементом в магнитопроводе намагничивающей катушке статора, определяются рядом относительных чисел: 3, 1, 3, 2, 3, 1, 3, 2, 3, 1 и т.д. Данная конструкция, за счет снижения расстояния между магнитопроводами намагничивающих катушек позволит уменьшить осевые габариты статора и увеличить ход якоря.
Конструктивные решения, связанные с размещением на статоре и якоре чередующихся магнитных и немагнитных элементов, известны в технике. Но в отличие от существующих конструкций, в предлагаемом электродвигателе осевая длина магнитных и немагнитных элементов статора определяется чередованием относительных чисел 3 и 1, а осевая длина магнитных и немагнитных элементов якоря определяется рядом относительных чисел, для варианта с магнитопроводом, содержащим: один немагнитный элемент - 3, 1, 3, 2, 3, 1, 3, 2, 3, 1 и т.д.; два немагнитных элемента - 3, 1, 3, 1, 3, 2, 3, 1, 3, 1, 3, 2 и т.д.; три немагнитных элемента - 3, 1, 3, 1, 3, 1, 3, 2, 3, 1, 3, 1, 3, 1, 3, 2 и т.д.
Применение предлагаемого электродвигателя в составе приводов возвратно-поступательного перемещения рабочих органов машин, позволит повысить экономический эффект за счет снижения материалоемкости, а соответственно и массы двигателя на единицу выполняемых работ.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СТРИЖКИ ЖИВОТНЫХ | 1994 |
|
RU2104149C1 |
| УСТРОЙСТВО ДЛЯ ОМАГНИЧИВАНИЯ ВОДЫ | 2002 |
|
RU2211807C1 |
| АППАРАТ МАГНИТНОЙ ОБРАБОТКИ ВЕЩЕСТВА | 1994 |
|
RU2077503C1 |
| АППАРАТ МАГНИТНОЙ ОБРАБОТКИ ВЕЩЕСТВА | 2002 |
|
RU2223234C1 |
| АППАРАТ МАГНИТНОЙ ОБРАБОТКИ ВЕЩЕСТВА | 2002 |
|
RU2239606C2 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2007 |
|
RU2361353C2 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2013 |
|
RU2543512C1 |
| ЭЛЕКТРОМАГНИТНЫЙ РАСЦЕПИТЕЛЬ ДЛЯ АВТОМАТИЧЕСКОГО ВЫКЛЮЧАТЕЛЯ | 1995 |
|
RU2094887C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1996 |
|
RU2111606C1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1991 |
|
RU2031526C1 |
Использование: в дискретном электроприводе поступательного перемещения. Сущность: статор содержит шпильки 1, на которые надеты магнитные основания 2, полюсы 3, немагнитные втулки 4, а также магнитные обручи 6, немагнитные шайбы 7, намагничивающиеся катушки 8. Якорь содержит стержень 9, на котором крепятся магнитные 10 и немагнитные гайки 11. Осевые длины магнитных и немагнитных элементов статора и якоря определяются чередованием относительных чисел 1 и 3. 4 ил.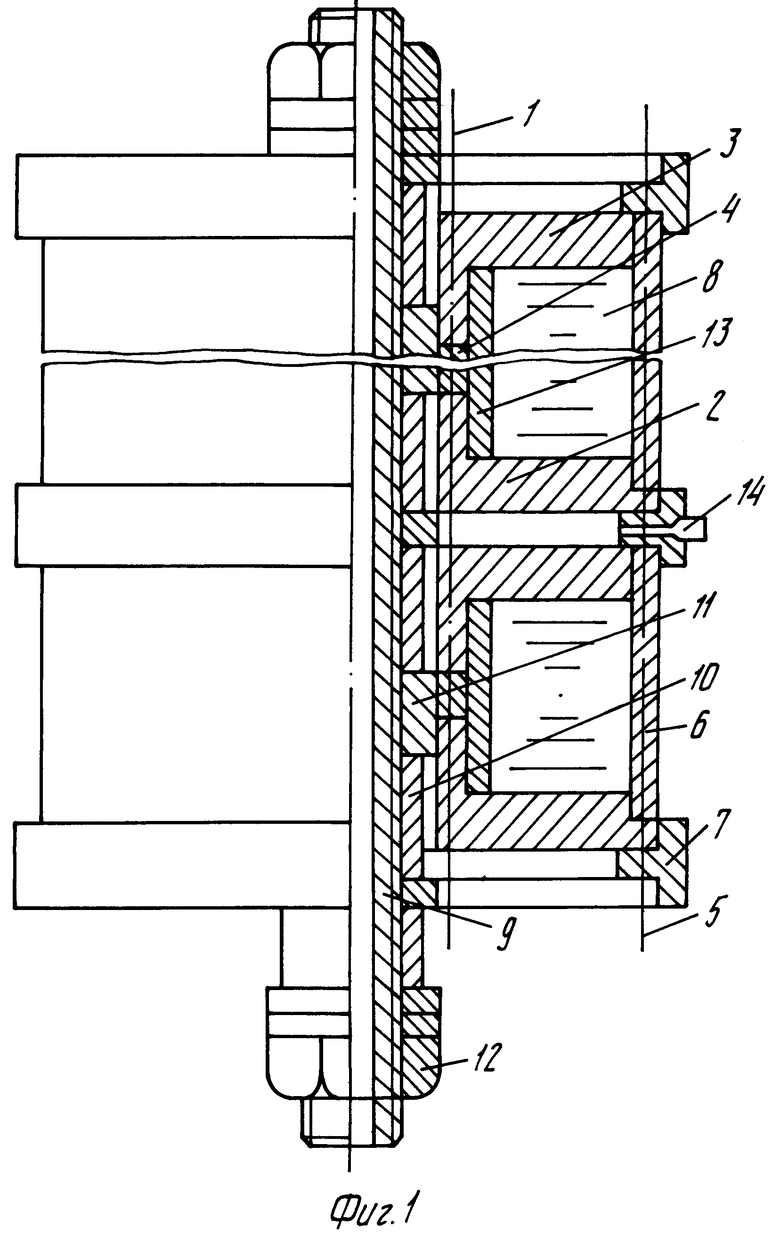
Линейный электродвигатель, состоящий из статора и якоря, содержащих прилегающие к воздушному зазору магнитные и немагнитные элементы, отличающийся тем, что осевые длины магнитных и немагнитных элементов статора определяются чередованием относительных чисел 3 и 1, а осевые длины чередующихся магнитных и немагнитных элементов якоря определяются рядом относительных чисел: 3, 1, 3, 2, 3, 1, 3, 2 и т.д., или 3, 1, 3, 1, 3, 2, 3, 1, 3, 1, 3, 2 и т.д., или 3, 1, 3, 1, 3, 1, 3, 2, 3, 1, 3, 1, 3, 1, 3, 2 и т.д.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство 920977, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, авторское свидетельство, 1116947, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
