Изобретение относится к машиностроению и может быть использовано в транспортном машиностроении и станкостроении.
Известна инерционная муфта, содержащая ведущую полумуфту и ведомую полумуфту в виде ведущего и ведомого центральных конических колес, установленных соответственно на ведущем и ведомом валах, сателлиты с инерционными грузами, выполненными в виде конических зубчатых колес, установленных с возможностью свободного вращения на оси, перпендикулярной оси муфты и находящихся в зацеплении с ведущим и ведомым центральными зубчатыми колесами, ось сателлитов установлена с возможностью свободного вращения относительно осей центральных зубчатых колес, а инерционные грузы выполнены в виде соосных сателлитам маховиков (см. авт. св. СССР N 1821584, кл. F 16 D 43/20, 1992 г.).
Наиболее близким по совокупности признаков техническим решением к заявленной передаче является инерционная автоматическая бесступенчатая передача, содержащая соосные входной и выходной валы, инерционное тормозное устройство, состоящее из ведущего и опорного элементов, механически взаимодействующих при помощи включенных в состав инерционного тормозного устройства инерционных грузов, которые установлены при помощи водила на валу инерционного тормозного устройства с возможностью вращения вместе с этим валом, дифференциал, один из концевых валов которого связан с инерционным тормозным устройством, два других - с входным и выходным валами (см. заявка РФ N 94011268, МПК F 16 H 33/10, F 16 H 3/74, 1995 г.)
Недостатками этой инерционной автоматической бесступенчатой передачи является то, что она имеет ограниченный диапазон трансформирования частоты вращения выходного вала в сторону ее увеличения по сравнению с частотой вращения входного вала, резкое уменьшение величины передаваемого вращающегося момента при увеличении частоты вращения выходного вала, что в совокупности не обеспечивает возможности наиболее рационального использования мощности применяемого двигателя и работы данной передачи с высокими показателями КПД и, в конечном итоге, не позволяет уменьшить вредное экологическое воздействие на окружающую среду применяемых двигателей внутреннего сгорания.
Предлагаемое изобретение обеспечивает достижение технического результата, который заключается в расширении диапазона автоматического и бесступенчатого регулирования частоты вращения выходного вала и передаваемого им вращательного момента по сравнению с входным валом в зависимости от нагрузки, повышении КПД при передачи мощности от двигателя на рабочие органы и связанным с этим уменьшением вредного экологического воздействия на окружающую среду применяемых двигателей, управляемом реверсировании вращения выходного вала, а также в возможности торможения рабочей машины при помощи двигателя.
Указанный технический результат достигается тем, что в автоматической бесступенчатой механической передаче, содержащей соосные входной и выходной валы, инерционное тормозное устройство, состоящее из ведущего и опорного элементов, механически взаимодействующих при помощи включенных в состав инерционного тормозного устройства инерционных грузов, которые установлены при помощи водила на валу инерционного тормозного устройства с возможностью вращения вместе с этим валом, дифференциал, один из концевых валов которого связан с инерционным тормозным устройством, два других - с входным и выходным валами, согласно изобретению водило дифференциала закреплено на входном валу и выполнено в виде радиальных осей, на этих осях установлены с возможностью вращения сателлиты, которые входят в зацепление с размещенными по разные стороны от осей сателлитов водила центральными колесами дифференциала, одно из которых закреплено на полом валу инерционного тормозного устройства, а второе центральное колесо закреплено на выходном валу, полый вал инерционного тормозного устройства установлен коаксиально с входным валом, а опорный элемент инерционного тормозного устройства неподвижно закреплен в корпусе и взаимодействует с инерционными грузами при их вращении относительно оси передачи.
Инерционное тормозное устройство выполнено в виде инерционной муфты, содержащей ведущий и ведомый элементы, из которых ведомый элемент жестко закреплен в корпусе и является опорным элементов инерционного тормозного устройства, и водило с размещенными на нем инерционными грузами, при помощи которых ведущий и опорный элементы находятся во взаимодействии между собой.
Инерционное тормозное устройство выполнено в виде являющегося ведущим элементом водила с радиальными осями, на которых с возможностью вращения установлены инерционные грузы в виде маховиков, жестко соединенных с соосными им сателлитами, выполненными в виде зубчатых конических колес, и являющегося опорным элементом центрального зубчатого конического колеса, жестко закрепленного в корпусе и находящегося в зацеплении с сателлитами, при этом маховики и сателлиты имеют возможность одновременного вращения относительно двух перпендикулярных осей - оси передачи вместе с водилом и вокруг своих осей, установленных на этом водиле, с соответствующим постоянным изменением направления векторов моментов количества движения маховиков относительно оси передачи.
Каждый из сателлитов дифференциала выполнен в виде жестко соосно соединенных между собой в единый блок двух зубчатых конических колес, одно из которых находится в зацеплении с первым центральным колесом дифференциала, закрепленном на полом валу инерционного тормозного устройства, а второе - входит в зацепление со вторым центральным колесом дифференциала, закрепленным на выходном валу, при этом передаточные отношения этих пар зацепляющихся колес имеют разную величину.
Каждый из сателлитов дифференциала выполнен в виде одного зубчатого колеса и находится в зацеплении одновременно с обоими центральными колесами дифференциала, размещенными по разные стороны от осей сателлитов.
Входной и выходной валы связаны механизмом свободного хода, ведущая обойма которого установлена на выходном валу, а ведомая - на входном валу.
Автоматическая бесступенчатая механическая передача дополнительно снабжена главным выходным валом, который связан с выходным валом при помощи реверсивного механизма вращения, который содержит внешний по отношению к выходному валу коаксиальный вал, и эти валы связаны тремя зубчатыми колесами, одно из которых установлено на выходном валу, другое колесо - на коаксиальном валу, а третье колесо является промежуточным, ось которого связана с корпусом с возможностью свободного вращения, на выходном и коаксиальном валах установлены параллельные ведущие элементы фрикционного сцепления, между которыми размещен с зазорами выходной фрикционный элемент сцепления, установленный на главном выходном валу с возможностью управляемого перемещения в осевом направлении и сцепления при этом с одним из ведущих элементов фрикционного сцепления.
Указанные существенные признаки, характеризующие изобретение, обеспечивают достижение заданного технического результата за счет соответствующей связи трех концевых валов дифференциала с другими элементами передачи и применения сателлитов дифференциала в виде жестко соосно соединенных между собой в единый блок двух зубчатых конических колес, обеспечивающих возможность значительного расширения диапазона передаточного отношения между входным и выходным валами. Существенным достоинством передачи является обеспечение автоматического бесступенчатого трансформирования в широком диапазоне передаваемого вращающего момента в зависимости от нагрузки на выходном валу, создание максимального по величине не вращающего момента на неподвижном (заторможенном нагрузкой или при начале движения) выходном валу, возможность автоматического торможения рабочей машины при помощи выключенного двигателя (например, при движении машины под уклон), возможность запуска двигателя с применением буксировки машины, а также осуществление управляемого реверсивного вращения выходного вала.
На чертеже дан общий вид автоматической бесступенчатой механической передачи с показом всех ее элементов и отличительных признаков, характеризующих изобретение.
Автоматическая бесступенчатая механическая передача содержит корпус 1, соосные входной 2 и выходной 3 валы, инерционное тормозное устройство и дифференциал, один из концевых валов которого связан с инерционным тормозным устройством, а два других - с входным 2 и выходным 3 валами. Согласно изобретению водило 4 дифференциала закреплено на входном валу 2 и выполнено в виде радиальных осей, на которых установлены с возможностью вращения сателлиты дифференциала, каждый из которых выполнен в виде жестко соосно соединенных между собой в единый блок двух зубчатых конических колес - внутреннего колеса 5 и внешнего колеса 6 относительно оси О-О передачи.
Каждое в отдельности из этих колес входит в зацепление с размещенными по разные стороны от осей сателлитов водила 4 центральными колесами дифференциала, одно из которых - первое центральное колесо 7 закреплено на полом валу 8 инерционного тормозного устройства, а второе центральное колесо 9 закреплено на выходном валу 3. Полый вал 8 инерционного тормозного устройства установлен коаксиально с входным валом 2 и на нем закреплено являющееся ведущим элементом водило 10 инерционного тормозного устройства с радиальными осями, на которых с возможностью вращения установлены сателлиты 11, выполненные в виде зубчатых конических колес, жестко соединенных с соосными им инерционными грузами в виде маховиков 12. Сателлиты 11 находятся в зацеплении с являющимся опорным элементом инерционного тормозного устройства центральным зубчатым коническим колесом 13, жестко неподвижно закрепленным в корпусе 1 и взаимодействующим и инерционными грузами в виде маховиков 12 при их вращении относительно оси О-О передачи. При этом сателлиты 11 и маховики 12 имеют возможность одновременного вращения относительно двух перпендикулярных осей - оси передачи О-О вместе с водилом 10 и вокруг установленных на этом водиле своих осей О1-О1, с соответствующим постоянным изменением направления векторов моментов количества движения маховиков и сателлитов относительно оси передачи О-О.
Исходя из сказанного выше, инерционное тормозное устройство состоит из ведущего и опорного элементов, механически взаимодействующих при помощи включенных в состав инерционного тормозного устройства инерционных грузов 12, которые установлены при помощи водила 10 на валу 8 инерционного тормозного устройства с возможностью вращения вместе с этим валом. При этом, согласно изобретению, инерционное тормозное устройство выполнено в виде одной из известных инерционных муфт, содержащей ведущий и ведомый элементы, из которых ведомый элемент в виде центрального колеса 13 жестко закреплен в корпусе 1 и является опорным элементом инерционного тормозного устройства, а водило 10 с размещенными на нем инерционными грузами в виде маховиков 12 осуществляет взаимодействие между собой ведущего и опорного элементов передачи.
Сателлиты дифференциала могут иметь разное устройство, что определяет возможные интервалы трансформирования передаваемого вращающего момента и частоты вращения. В данном случае сателлиты дифференциала выполнены в виде жестко соосно соединенных между собой в единый блок зубчатых конических колес 5 и 6, одно из которых 5 находится в зацеплении с первым центральным колесом дифференциала 7, закрепленном на полом валу 8 инерционного тормозного устройства, а второе колесо 6 входит в зацепление с вторым центральным колесом 9 дифференциала, закрепленным на выходном валу 3. При этом указанные пары зацепляющихся колес имеют разные по величине передаточные отношения.
Каждый из сателлитов дифференциала может быть также выполнен в виде одного зубчатого колеса, находящегося в зацеплении одновременно с обоими центральными колесами дифференциала 7 и 9, размещенными по разные стороны от осей 4 сателлитов. При этом упрощается устройство передачи, но одновременно уменьшается интервал трансформирования передаваемого вращающего момента и частоты вращения.
Входной 2 и выходной 3 валы связаны механизмом свободного хода 14, ведущая обойма которого установлена на выходном валу 3, а ведомая - на входном валу 2.
Автоматическая бесступенчатая механическая передача дополнительно снабжена главным выходным валом 15, который связан с выходным валом 3 при помощи реверсивного механизма вращения, который содержит внешний по отношению к выходному валу 3 коаксиальный вал 16, и эти валы связаны тремя зубчатыми колесами 17, 18, 19, одно из которых 17 установлено на выходном валу 3, другое колесо 18 - на коаксиальном валу 16, а третье колесо 19 является промежуточным, ось которого связана с корпусом с возможностью свободного вращения, на выходном и коаксиальном валах установлены параллельные ведущие элементы 20 фрикционного сцепления, между которыми размещен с зазорами выходной фрикционный элемент 21 сцепления, установленный на главном выходном валу 15 с возможностью управляемого перемещения в осевом направлении и сцепления при этом с одним из ведущих элементов 20 фрикционного сцепления.
Автоматическая бесступенчатая механическая передача работает следующим образом.
При вращении входного вала 2 вместе с установленным на нем водилом 4 дифференциала и неподвижном выходном вале 3 и установленном на нем втором центральном колесе 9 дифференциала в связи с приложенной к нему нагрузкой или началом вращения из неподвижного положения, каждое внешнее колесо 6 блока сателлитов дифференциала, находящегося в зацеплении с указанным неподвижным центральным колесом 9, обкатывается по этому колесу и вращается относительно своей оси 4. При этом внутреннее колесо 5 блока сателлитов приводит во вращение связанное с ним первое центральное колесо 7 дифференциала и жестко связанный с ним вал 8 и водило инерционного тормозного устройства. Исходя из свойства дифференциала, при неподвижном втором центральном колесе 9, первое инерционное колесо 7 и связанные с ним элементы инерционного тормозного устройства вращаются с максимальной частотой, превышающей частоту вращения входного вала 2 с учетом передаточных отношений между колесами 5, 6 блока сателлитов и соответствующими центральными колесами 7, 9 дифференциала. При вращении водила инерционного тормозного устройства размещенные на его осях 10 сателлиты 11 обкатываются по закрепленному в корпусе 1 неподвижному центральному опорному колесу 13 и вовлекают во вращение жестко связанные с ними маховики 12 инерционных грузов. При этом сателлиты 11 и маховики 12 совершают вращение одновременно вокруг двух осей - оси передачи О-О и осей О1-О1 сателлитов, что равнозначно вращению их относительно точки О1 пересечения этих осей.
Известно, что вращающееся тело имеет определенный момент количества движения, который проявляется с соблюдением фундаментального (всеобщего) физического закона сохранения, согласно которому момент количества движения может быть изменен только под действием внешних сил. Известно также, что момент количества движения при вращении тела относительно точки является векторной величиной и направление вектора совпадает с направлением оси вращения непосредственно тела, в данном случае с направлением оси О1-О1 сателлитов. Но поскольку ось О1-О1 сателлитов совершает вращение вокруг оси О-О передачи, направление вектора момента количества движения сателлитов 11 и маховиков 12 постоянно изменяется.
Известно, что действия над векторами являются отражением соответствующих действий над векторными величинами, а векторные величины являются равными, если совпадают их числовые значения и направления. Исходя из этого, при указанном выше вращении сателлитов и маховиков относительно двух осей одновременно их моменты количества движения принудительно изменяются под воздействием в конечном итоге от вращающего момента, передаваемого входным валом 2, и момента сопротивления, приложенного к выходному валу 3. Проявление при этом закона сохранения противодействует вращению водила инерционного тормозного устройства 10 вокруг оси О-О передачи, которое стремится сохранить свое стабильное положение. В связи с этим водило и его радиальные оси 10 играют роль опоры для передачи вращения и вращающего момента при помощи сателлитов 5, 6 дифференциала и первого центрального колеса 7 на второе центральное колесо 9 дифференциала и далее - на выходной вал 3. При этом внешней опорой для торможения водила 10 инерционного тормозного устройства и обеспечения при этом передачи и преобразования вращающего момента является корпус 1 передачи, в котором закреплено опорное колесо 13, обеспечивающее вращение сателлитов 11 инерционного тормозного устройства с маховиком 12 вокруг осей О1-О1 водила 10 при одновременном вращении самого водила вместе с маховиками и сателлитами вокруг оси О-О передачи. В зависимости от передаточных отношений применяемых пар колес 5, 7 и 6, 9, входящих соответственно в состав блока сателлитов и относящихся к центральным колесам дифференциала, на выходной вал 3 передается вращающий момент, величина которого может быть больше, чем на входном валу 2. Под действием передаваемого вращающего момента выходной вал 3 приводится во вращение.
Возможность автоматического трансформирования передаваемого вращающего момента в зависимости от нагрузки на выходном валу 3 определяется моментом торможения водила 10 инерционного тормозного устройства (как опоры для первого центрального колеса 7 дифференциала при передаче момента от входного вала 2 через дифференциал на выходной вал 3) при вращении этого водила относительно оси передачи О-О, и величина указанного момента торможения зависит от совокупной массы сателлитов 11 и маховиков 12 и частоты их вращения одновременно вокруг оси О1 -О1 водила 10 инерционного тормозного устройства и оси О-О передачи. В свою очередь частота этих вращений находится в обратной зависимости от частоты вращения второго центрального колеса 9 дифференциала. Отсюда следует вывод, что величина передаваемого вращающего момента зависит от величины разности в частотах вращения входного 2 и выходного валов и соответственно от величины разности вращения первого 7 и второго 9 центральных колес дифференциала.
Максимальная величина передаваемого вращающего момента будет при неподвижном (заторможенном нагрузкой) выходном вале, поскольку при этом первое центральное колесо 7 дифференциала и водило инерционного тормозного устройства вращаются вокруг оси О-О передачи, а сателлиты 11 и маховики 12 инерционного тормозного устройства - вокруг осей О1-О1водила 10, а в совокупности - относительно центральной точки О1 пересечения этих осей, с наибольшей частотой, что обеспечивает наиболее интенсивное и максимальное по величине изменение их моментов количества движения.
При отсутствии нагрузки на выходном валу 3 вращающий момент на него не передается. При вращении входного вала 2 это возможно только при неподвижном водиле 10 инерционного тормозного устройства, когда сателлиты 11 и маховики 12 не вращаются и не создают момента торможения для центрального колеса 7 дифференциала. При этом, исходя из свойства дифференциала, не передается момент и на второе центральное колесо 9 дифференциала и на выходной вал 3, который при отсутствии нагрузки вращается с максимальной частотой, зависящей от частоты вращения входного вала 2 и передаточных отношений пар соответствующих колес 5, 7 и 6, 9, входящих в состав дифференциала.
Следовательно, данная автоматическая передача обеспечивает бесступенчатое изменение передаваемого на выходной вал 3 вращающего момента, а также частоты его вращения. При этом максимальный по величине вращающий момент передается на выходной вал, остановленный приложенной к нему нагрузкой. Величина этого момента зависит помимо указанных выше условий также и от передаточных отношений пар колес 5, 7 и 6, 9 и может быть выше вращающего момента, передаваемого входным валом 2. Частным случаем работы является прямая передача, когда входной 2 и выходной 3 валы вращаются с одинаковой частотой при равенстве вращающих моментов на них, что обеспечивается соответствующим по величине тормозным моментом, передаваемым на первое центральное колесо 7 дифференциала от инерционного тормозного устройства.
При необходимости передачи вращающего момента и вращения от выходного вала 3 на входной вал 2 с целью торможения рабочей машины работа двигателя прекращается. При этом под воздействием вращающего момента, передаваемого от выходного вала на входной вал, происходит замыкание механизма свободного хода 14, который обеспечивает передачу потока мощности от выходного вала на входной вал и далее - на двигатель, принудительное вращение вала которого приводит к торможению рабочей машины. Таким же образом обеспечивается запуск двигателя с применением буксировки рабочей машины, что может иметь место в зимнее время, при разряженных аккумуляторах, неисправном стартере и др.
Реверсирование вращения выходного вала 3 и изменение направления передаваемого им вращающего момента осуществляется путем перемещения выходного элемента 21 реверсивного механизма вращения в осевом направлении и фрикционного сцепления его с одним из ведущих элементов 20, которые постоянно вращаются в противоположных направлениях благодаря применению трех зубчатых колес 17, 18, 19, связывающих выходной вал 3 с коаксиальным валом 16. При этом автоматическое регулирование вращения главного выходного вала 15 происходит при вращении его в обоих направлениях.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 1999 |
|
RU2163317C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171928C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2172438C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171929C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2001 |
|
RU2184894C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2001 |
|
RU2188975C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2172877C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2174203C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171933C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2001 |
|
RU2185553C2 |
Автоматическая бесступенчатая механическая передача направлена на расширение диапазона регулирования частоты вращения выходного вала в зависимости от нагрузки, повышение КПД и возможность торможения рабочей машины при помощи двигателя. Она содержит входной и выходной валы, инерционное тормозное устройство и дифференциал. Водило дифференциала закреплено на входном валу и выполнено в виде радиальных осей. На этих осях установлены сателлиты, которые входят в зацепление с центральными колесами дифференциала. Одно из центральных колес дифференциала закреплено на полом валу инерционного тормозного устройства, который установлен коаксиально с входным валом. Опорный элемент инерционного тормозного устройства закреплен в корпусе и взаимодействует с инерционными грузами при вращении их относительно оси передачи. 6 з.п. ф-лы, 1 ил.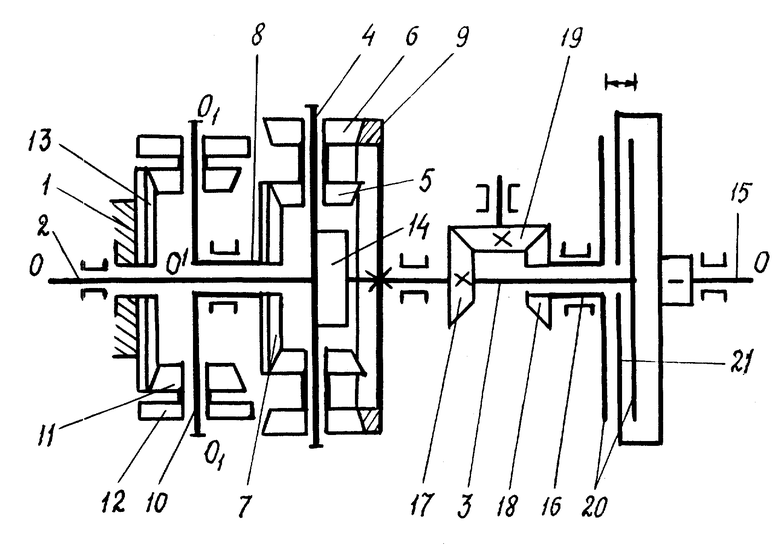
| SU, авторское свидетельство, 1821584, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| RU, заявка, 94011268/28, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |

