Изобретение относится к медицинской технике и может применяться для дозированных парентеральных инфузий жидких лекарственных препаратов как в условиях стационара, так и во время транспортировки больного.
Изобретение относится к классу аппаратов медицинской техники, используемой для проведения инфузионной терапии и клинического питания, в которых инфузия лекарств происходит не под действием силы тяжести жидкости, а с помощью специального перистальтического механизма, создающего необходимое давление. Такие аппараты позволяют обеспечить длительное, строго дозированное введение лекарственных препаратов, обеспечивая при этом автоматический контроль за процессом инфузии.
Несмотря на достаточно высокую стоимость этих аппаратов и их сложность, такие области медицины, как онкология, интенсивная терапия, кабустиология, детская хирургия, имеют большую потребность в подобных технических средствах.
Известен целый ряд устройств, обеспечивающих проведение процесса инфузии за счет перистальтического силового привода (например, патент США N 4867744, кл. A 61 M 5/00, 1989; заявка ЕПВ N 0411543, кл. A 61 M 5/142, 1991; заявка Японии N 1-57584, кл. A 61 M 5/00, 1989; заявка ЕПВ N 0374618, кл. A 61 M 5/142, G 01 B 21/14, 1990; заявка Японии N 1-16507, кл. A 61 M 5/00, 1989; патент ФРГ N 3912405, кл. A 61 M 1/00, 1990).
В указанных устройствах используются два различных принципа подачи жидкости посредством деформации гибкой трубки.
Первый (заявка ЕПВ N 0374618) - так называемый "роликовый насос", в котором выталкивание жидкости обеспечивается "обкаткой" по окружности гибкой трубки роликовым механизмом, содержащим от одного до четырех роликов.
Такие устройства не экономичны, так как требуют существенного увеличения мощности приводного двигателя и тем самым габаритов всего устройства ввиду того, что в таком насосе производится непрерывная (перекатывающаяся) деформация до пережатия по всей рабочей длине трубки в нескольких местах одновременно.
Использование таких насосов оправдано при больших удельных объемах перекачиваемых жидкостей (> 1000 мл/ч). В большинстве же случаев при объемах от 1 до 400 мл/ч применяются насосы с возвратно-поступательным многоштифтовым либо винтовым принципом перистальтического пережатия гибкой трубки с выдавливанием жидкости.
Такие устройства имеют значительно меньшее энергопотребление, габариты, однако требуют наличия специальной силиконовой вставки (рабочий участок трубки) и характеризуются существенной нерегулярностью (наличием пульсаций) выходного потока жидкости по типу синусоиды, что ухудшает медико-лечебный эффект, особенно при введении больному высокотоксичных препаратов.
Наиболее близким к изобретению является устройство по заявке ЕПВ N 0411543, содержащее перистальтический привод, состоящий из 11-12 кулачков, близко расположенных друг к другу и установленных на едином валу, которые приводят к возвратно-поступательному движению штифты, пережимающие трубку по типу "бегущей волны" и инициируя движение жидкости вперед, продвигая ее по синусоидальному закону.
Цель предлагаемого изобретения - улучшение эксплуатационных характеристик, заключающееся в существенном уменьшении пульсаций жидкости на выходе насоса и возможности использования гибких трубок на основе ПВХ без специальной силиконовой вставки на рабочей части.
Цель достигается тем, что устройство, содержащее контейнер с лекарственной жидкостью, соединенный с гибкой деформируемой трубкой, блок управления насосом и перистальтический механизм, содержащий кулачки, установленные на валу и соединенные со штифтами, на рабочих концах которых расположены пуансоны, и прижимное приспособление, препятствующее смещению трубки в направлении нажима, выполнено с перистальтическим механизмом, состоящим из пяти кулачков, развернутых друг относительно друга на 90o и соединенных со штифтами, два из которых являются демпфирующими, а каждый кулачок разделен на четыре равных сектора, причем два противоположных сектора трех первых кулачков выполнены с радиусами, разность которых необходима для рабочего хода штифтов, обеспечивающих полное пережатие и открывание трубки до величины 0,55-0,7 от ее внутреннего диаметра и двух кулачков с радиусами, разность которых необходима для обеспечения половины рабочего хода двух других штифтов, а два других сектора всех кулачков выполнены с профилем в виде спирали Архимеда, соединяющей сектора с разными радиусами. Максимальный радиус первых четырех кулачков одинаков и выбран из условия обеспечения минимального момента на валу двигателя при максимально вытесненном объеме жидкости, а максимальный радиус пятого кулачка уменьшен на величину, равную половине рабочего хода первых трех кулачков, обеспечивая ход штифта, перекрывающего трубку от 0,55-0,7 внутреннего диаметра до половины ее рабочей части. Пуансоны выполнены с профилями в плоскости параллельной продольной оси трубки в виде полуокружностей, радиусы которых равны 1,5-2 внешнего диаметра трубки, а расстояние между ними 2,5-3 внешнего диаметра трубки.
На фиг. 1 показана структурная схема устройства; на фиг. 2 - диаграмма режимов работы штифтов; на фиг. 3 - экспериментальная кривая зависимости объема вытесняемой жидкости от величины перемещения штифта для выбранного профиля пуансона; на фиг. 4 - профиль кулачка; на фиг. 5 - конструкция перистальтического механизма.
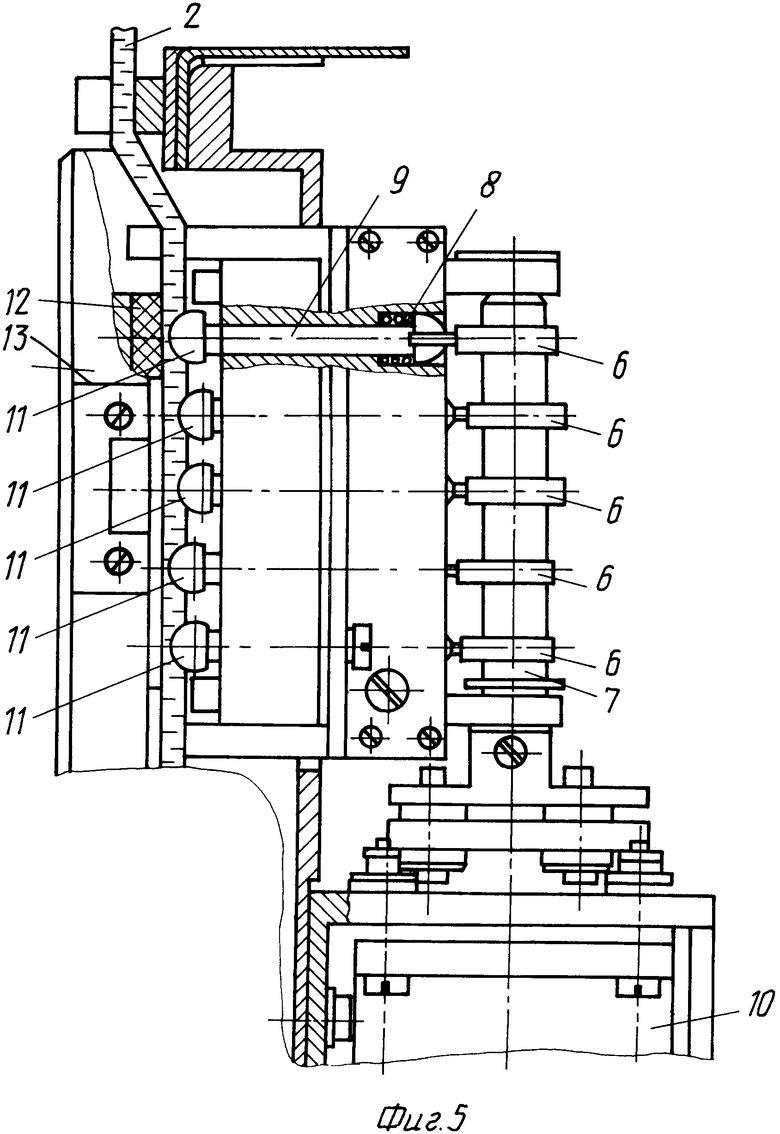
Предлагаемое устройство (фиг. 1) содержит контейнер 1 с жидкостью и присоединенной к нему деформируемой полимерной трубкой 2 с иглой на конце. Любой участок трубки заправляется в перистальтический механизм 3, в котором осуществляется ее циклическое пережатие, приводящее к принудительному движению жидкости. Выбор режима и управление работой перистальтического механизма осуществляется с помощью блока управления 4, соединенного с ним линией передачи 5. Перистальтический механизм 3 состоит из кулачков 6, установленных на валу 7 и приводящих в действие прижатые к кулачкам пружиной 8 штифты 9 посредством двигателя 10. На концах штифтов 8 расположены профильные пуансоны 11, которые осуществляют непосредственный контакт с трубкой 2 в процессе ее пережатия относительно прижимного приспособления 12 с эластичной прокладкой 13, препятствующего перемещению трубки 2 в направлении нажима.
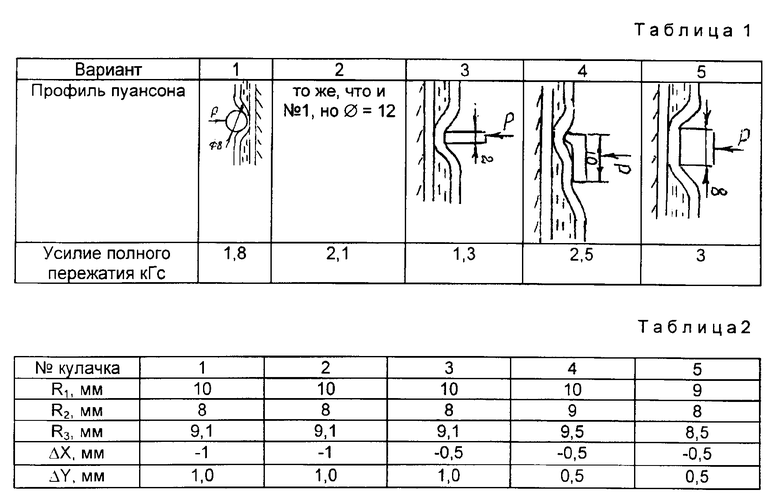
Профиль пуансонов существенно влияет на усилие прижатия и зависит от диаметра полимерной трубки 2. В табл. 1 приведены результаты экспериментальных исследований по выбору оптимального профиля кулачка по критерию: "минимальное усилие прижатия при максимально-возможном выталкиваемом объеме жидкости" для широко распространенной полимерной трубки, предназначенной для переливания инфузионных растворов, с наружным диаметром Dн = 4,6 мм и внутренним диаметром Dв = 3,3 мм.
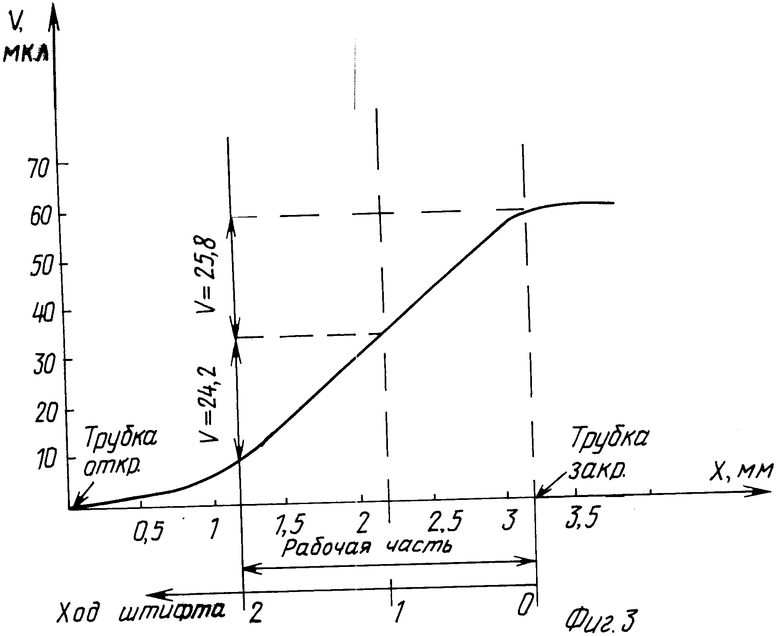
Из экспериментальных исследований установлено, что оптимальное сечение профиля пуансона должно быть в виде полуокружности с радиусом, равным 1,5-2 внешнего диаметра трубки. Для обеспечения плавности подачи жидкости по мере поступательного движения штока необходимо обеспечение линейной зависимости объема V вытесняемой жидкости от величины перемещения X, то есть эта зависимость должна максимально приближаться к виду V = KX, где K = const.
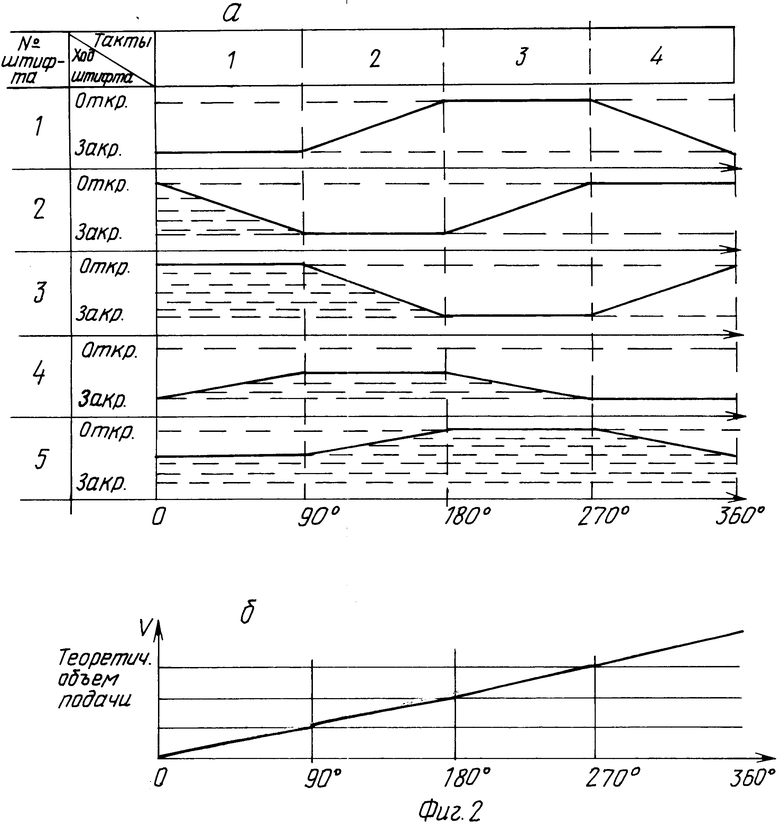
При выбранном профиле пуансона в виде цилиндра экспериментальная зависимость V = f(x) представляет кривую (фиг. 2), на которой отчетливо виден линейный участок, в пределах которого и должно осуществляться движение пуансонов, деформирующих трубку. Это обстоятельство позволяет использовать в аппарате трубки с широким диапазоном наружных диаметров при сохранении постоянной скорости вытекания вытесняемого объема жидкости. Чтобы сохранить эту линейность при работе двух соседних пуансонов, расстояние между ними в вертикальной плоскости не должно быть меньше по крайней мере одного диаметра их профиля.
Кроме обеспечения линейности вытесняемого объема жидкости при равномерном движении пуансона, для плавной непрерывной подачи жидкости необходим определенный режим работы штифтов. На фиг. 2,а условно показаны режимы работы каждого из штифтов за один цикл рабочего вала с кулачками. Этот цикл разделен на четыре равных такта, каждый из которых соответствует 90o поворота рабочего вала. Нумерация штифтов, расположенных последовательно в ряд вдоль трубки 2, начинается со штифта, установленного на входе насоса. Штифты перекрывают трубку поочередно. Пятый штифт является демпфирующим, исключающим прерывание потока при перекрывании трубки четвертым штифтом. Положению штифтов на фиг. 2 соответствует размер сечения, через которое в данный момент проходит жидкость. Особенностью конструкции перистальтического механизма является также то обстоятельство, что штифты четыре и пять перемещаются только на половину рабочего хода остальных штифтов, причем штифт четыре перекрывает трубку от половины ее рабочей части до полного закрытия, а пятый штифт от 0,55-0,7 внутреннего диаметра трубки до половины ее рабочей части. Штриховкой условно показана часть жидкости, участвующая в ее рабочем движении, то есть выталкиваемая. Для осуществления такого режима перемещения штоков требуются соответствующие профили кулачков, фиг. 4.
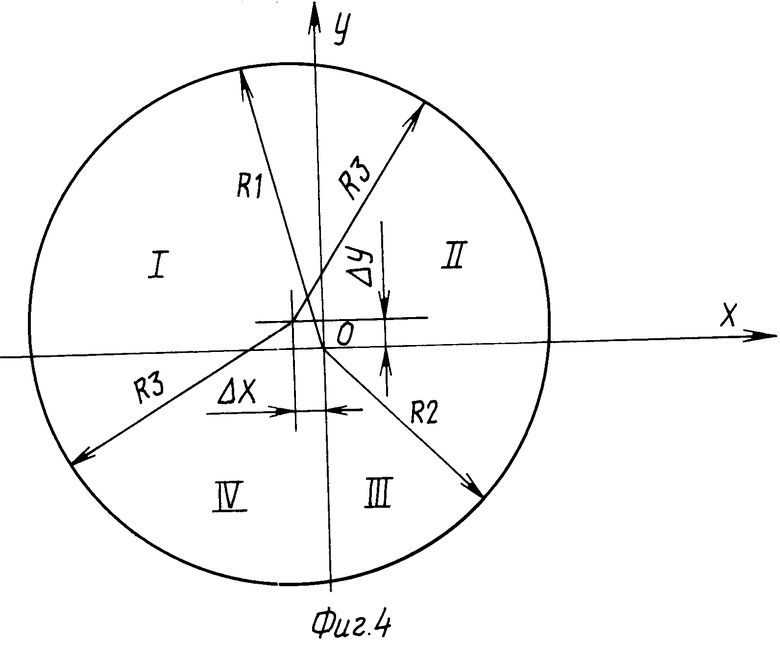
Каждый из кулачков разделен на четыре равных сектора (I, II, III и IV на фиг. 4). Два противоположных сектора I и III имеют профиль в виде частей окружностей с радиусами R1 и R2, причем ΔR = R1-R2 этих окружностей равна необходимому ходу штифта. Два других сектора II и IV имеют профиль в виде спирали Архимеда, соединяющей указанные окружности, как условно показано на фиг. 4. С целью упрощения технологии изготовления эти участки спирали с погрешностью не более 5% от линейной зависимости можно заменить частями окружности с радиусом R3, центр которой смещен относительно центра окружностей двух других секторов на величину ΔX и ΔY , где ΔX ≅ ΔY; ΔY = (R1-R2)/2. .
Например, для трубки с внутренним диаметром Dв = 3,3 мм и наружным Dн = 4,6 мм, исходя из стремления минимальной потребляемой мощности двигателя и обеспечения технологических требований при изготовлении кулачков с минимальными размерами, приняты размеры, указанные в табл. 2.
Наибольший потребляемый момент на рабочем валу имеет место во время начала полного пережатия трубки. Это происходит в конце каждого такта (фиг. 2). Предыдущий (перед закрывающим) штифт создает давление на подшипники рабочего вала, передаваемое через кулачок, обкатываемый по неизменной (максимальной) окружности, то есть потребный для этого момент - преодолевает только трение качения в подшипниках вала и трение скольжения в осях роликов, прижимающихся к кулачкам. Момент, необходимый для пережатия трубки движущимися пуансонами, можно рассчитать по формулам
Mp = PRtgα
где
Mр - момент силы нормальной к поверхности кулачка;
P - сила пережатия трубки;
R - максимальный радиус кулачка (R1 на фиг. 4);
Mтр - момент силы трения скольжения оси ролика;
μ - коэффициент трения скольжения;
α - угол скоса поверхности кулачка;
Mк - момент силы, передаваемый кулачку валом для пережатия трубки;
tgα = 2h/R , где h - полный ход штифта.
С учетом вышеприведенного и данных табл. 1, а также принимая μ = 0,04, имеем Mк ≅ 300 Гсм. Для учета дополнительных факторов (трение в подшипниках рабочего вала, трение осей роликов стальных штифтов, трение при движении штифтов и т. п.) вводится коэффициент запаса Kз = 2. Отсюда потребный расчетный момент на рабочем валу составит Mраб.вал = 2Mк = 600 Гсм. Такой момент можно создать достаточно малогабаритным электродвигателем, соединенным непосредственно с рабочим валом, без редукции. Наиболее подходящими типами электродвигателей для этой цели являются шаговые двигатели, которые обладают широкой и точной регулировкой скорости вращения и обеспечивающие требуемый момент без использования редуктора.
Аппарат работает следующим образом.
После расположения контейнера 1 с лекарством и "прогона" воздушного столба через инфузионную трубку 2, которая вставляется в соответствующие направляющие перистальтического механизма и прижимается с помощью прижимного приспособления 12 к рабочим пуансонам 11 штифтов 9, посредством блока управления 4 задается необходимая скорость подачи жидкости и включается в работу двигатель 10, приводя в действие перистальтический механизм 3, который осуществляет подачу жидкости согласно диаграммы на фиг. 2,а. В первом такте первый штифт перекрывает поток жидкости, а второй штифт выдавливает полный объем, имеющейся под ним, однако четвертый штифт открывается наполовину, т. е. втягивает половину выталкиваемого вторым штифтом объема жидкости. Таким образом, происходит линейное выталкивание половины полного объема с постоянной скоростью. Во втором такте в момент полного закрытия трубки вторым штифтом начинает двигаться третий штифт, а пятый штифт втягивает половину аналогично работе второго и четвертого штифтов в предыдущем такте. При этом происходит продолжение выталкивания жидкости с той же скоростью, что и в первом такте. В третьем такте выталкивание производит четвертый штифт, однако, поскольку его ход в два раза меньше, чем ход второго и третьего штифтов, то скорость выталкиваемой жидкости не изменяется. Аналогично работает и пятый штифт, продолжая выталкивание с той же скоростью. В конце цикла положение штифтов соответствует началу первого такта, что позволяет повторять циклы без прерывания потока. Кроме того, во втором, третьем и четвертом тактах одновременно происходит втягивание жидкости в трубку со стороны ее входа, заполняя неработающую ее часть и подготавливая ее к очередному циклу, при этом по входу имеет место неравномерная скорость заполнения, например, в первом такте жидкость не втягивается, однако это никак не отражается на линейности подачи на выходе насоса. Максимальная нагрузка на двигатель будет только в моменты полного пережатия двигающимся штифтом, т.е. в моменты, соответствующие границам между тактами, так как предыдущий штифт не перемещается и, следовательно, двигатель преодолевает только момент трения, создаваемый в подшипниках от силы реакции прижимаемой трубки.
Рассмотренный режим работы насоса позволяет получить непрерывный и равномерный поток выдавливаемой жидкости (фиг. 2,б), что выгодно отличает предлагаемое устройство от существующих аналогов, которые в лучшем случае обеспечивают синусоидальный характер движения жидкости, что при малых скоростях подачи жидкости (< 50 мл/ч) может привести к закупорке иглы на выходе инфузионной трубки при длительной задержке движения жидкости из-за неравномерной ее подачи. Профиль кулачков и режим их работы обеспечивают незначительный момент на валу двигателя, что позволяет отказаться от специальных дорогих силиконовых вставок и использовать серийные инфузионные системы для переливания лекарств.
Конструкция перистальтического механизма с положением пуансонов, соответствующем исходному состоянию цикла (0 на фиг. 2), приведена на фиг. 5.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ВЛИВАНИЯ ИНФУЗИОННЫХ РАСТВОРОВ | 1995 |
|
RU2110284C1 |
| АВТОМАТ ДЛЯ СОРТИРОВКИ ПО ВЕСУ СТЕРЖНЕВЫХ ИЗДЕЛИЙ | 1990 |
|
RU2062665C1 |
| ОРУЖИЕ ДЛЯ САМООБОРОНЫ | 1992 |
|
RU2045735C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ МЕТАЛЛИЧЕСКОЙ ОБОЛОЧКИ ПУЛИ ОХОТНИЧЬЕГО ПАТРОНА ДЛЯ СТРЕЛЬБЫ ИЗ ОРУЖИЯ С НАРЕЗНЫМ КАНАЛОМ СТВОЛА | 1991 |
|
RU2015495C1 |
| СТВОЛ АВТОМАТИЧЕСКОГО ОРУЖИЯ | 1993 |
|
RU2089813C1 |
| УЧЕБНО-ТРЕНИРОВОЧНЫЙ ПРИБОР | 2000 |
|
RU2166167C1 |
| ГАЗОВЫЙ ПАТРОН | 1993 |
|
RU2044254C1 |
| УДАРНО-СПУСКОВОЙ МЕХАНИЗМ ДЛЯ ДВУСТВОЛЬНОГО ОРУЖИЯ | 1993 |
|
RU2072071C1 |
| УСТРОЙСТВО МАГНИТНОЙ СЕПАРАЦИИ КЛЕТОК | 1995 |
|
RU2089222C1 |
| ПИСТОЛЕТ-ПУЛЕМЕТ | 1997 |
|
RU2125221C1 |
Использование: медицинская техника, а именно устройства для дозированного парентерального вливания жидких лекарственных препаратов. В целях достижения технического результата, заключающегося в существенном уменьшении пульсаций жидкости на выходе устройства, возможности использования гибких трубок на основе ПВХ без применения специальных силиконовых вставок, не повышая момента на валу исполнительного двигателя, перистальтический привод содержит пять прижимных штифтов с пуансонами на рабочих концах. Пуансоны имеют профиль сечения в плоскости, параллельной продольной оси трубки в виде полуокружностей с радиусами, равными 1,5 - 2 внешнего диаметра трубки, а расстояние между ними 2,5 - 3 внешнего диаметра трубки. Первые три штифта по ходу движения жидкости являются только нагнетающими, а четвертый и пятый также и демпфирующими пульсации скорости подачи жидкости. Это достигается тем, что четвертый и пятый штифты перемещаются только на половину полного рабочего хода, причем четвертый штифт перекрывает трубку от половины ее рабочей части до полного закрытия, а пятый - от 0,55 - 0,7 внутреннего диаметра трубки до половины ее рабочей части. Возвратно-поступательное движение штоков обеспечивается кулачками, которые разбиваются на четыре сектора по 90o, причем два противоположных основных сектора каждого кулачка выполнены с радиусами, разность которых равна необходимому ходу штифта, а два других сектора имеют профили в виде спиралей Архимеда. Каждый кулачок развернут на валу друг относительно друга на 90o. Максимальный радиус первых четырех кулачков выбирается из условия минимального момента на рабочем валу во время начала полного пережатия трубки, что требует минимального радиуса кулачка и ограничивается технологическими возможностями при их изготовлении. Максимальный радиус пятого кулачка меньше максимального радиуса первых четырех кулачков на величину, равную половине рабочего хода первых трех кулачков. Рабочий ход имеет значение в рабочей части трубки от 0,55 - 0,7 внутреннего диаметра до ее перекрытия. 5 ил.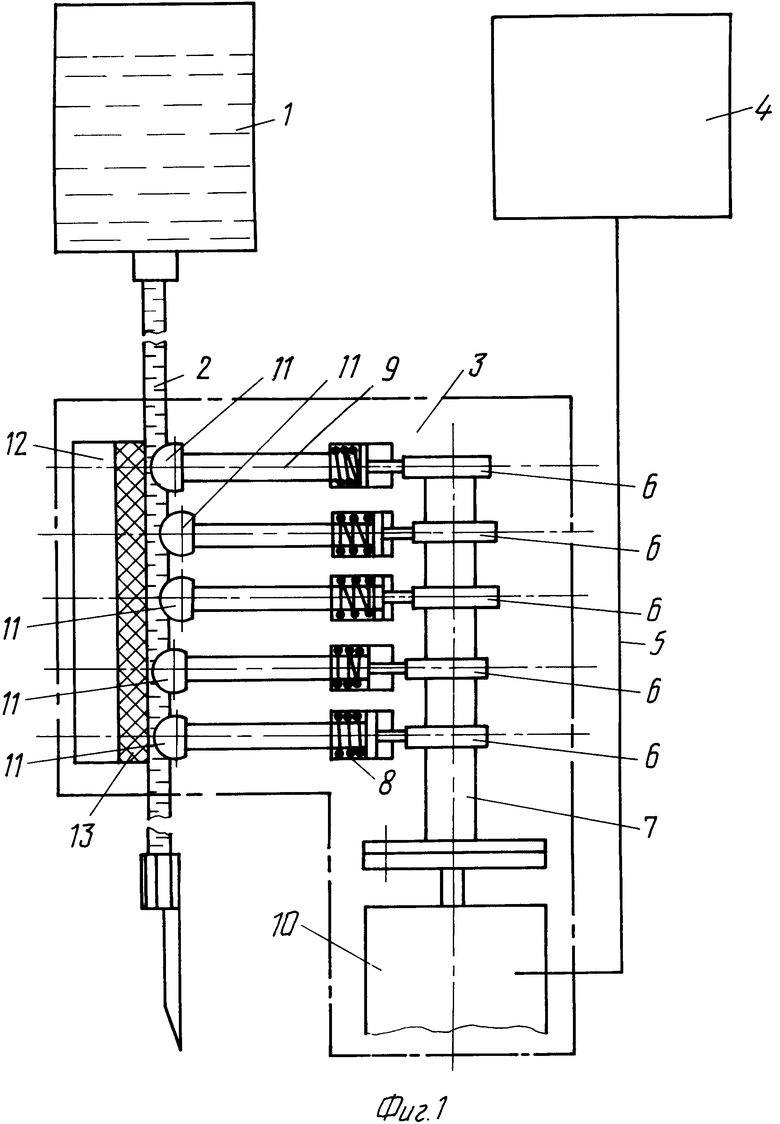
Аппарат перистальтического действия с системой плавной подачи лекарств, содержащий контейнер с лекарственной жидкостью, соединенный гибкой деформируемой трубкой с иглой, блок управления и перистальтический механизм с кулачками, установленными на валу, соединенном с электродвигателем, и приводящими в действие штифты, на рабочих концах которых расположены пуансоны, а также прижимное приспособление, препятствующее смещению трубки в направлении нажима, отличающийся тем, что перистальтический механизм содержит пять кулачков, развернутых друг относительно друга на 90o, со штифтами, два из которых являются демпфирующими, и пуансонами с профилями в плоскости, параллельной продольной оси трубки, выполненными в виде полуокружностей, радиусы которых равны 1,5 - 2 внешнего диаметра трубки, а расстояние между ними составляет 2,5 - 3 внешнего диаметра, причем каждый кулачок разделен на четыре равных сектора, два противоположных сектора трех кулачков имеют разные радиусы для обеспечения рабочего хода штифтов с возможностью пережатия трубки до величины 0,55 - 0,7 внутреннего ее размера и открывания, остальные два кулачка имеют по два противоположных сектора с разными радиусами для обеспечения половины рабочего хода штифтов, а два других сектора всех пяти кулачков выполнены с профилем в виде спирали Архимеда, соединяющей разные радиусы двух противоположных секторов.
| EP, патент, 0411543, кл | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
