Изобретение касается измерения расстояния, а конкретнее измерения расстояния на основе интерференции когерентных волн лазерного диода.
Известно, что полупроводниковые лазеры типа лазерных диодов можно использовать для измерения расстояний (см. Г. Бихеймом и др. Определение расстояния, используя лазерный диод с частотной модуляцией. Журнал Прикладная оптика, том 25, N 9, 1986 г.). Лазерный диод обычно имеет оптический резонатор, содержащий два расположенных напротив друг друга полированных торца (называемых фасетками), каждый из которых имеет известный показатель преломления, и расположенную между ними усиливающую свет среду. Свет генерируется внутри резонатора диода посредством пропускания электрического тока через p - n-переход диода (обычно используя торцы, другие чем фасетки). Свет внутри диодного резонатора отражается от первой (например, передней) фасетки к второй (например, задней) фасетке повторяющимся образом, обеспечивая тем самым индуцированное излучение и хорошо известный механизм работы лазера. Обычно передняя и задняя фасетки частично прозрачные (то есть имеют не 100% отражательную способность). Таким образом, некоторая часть света выходит из лазера от передней и задней фасеток. Количество света, выходящего через непокрытую фасетку, определяется ее показателем преломления.
Как известно, режим работы лазерного диода может существенно зависеть от воздействия внешней оптической обратной связи, то есть возвращения части выходного света лазера обратно в лазерный резонатор от внешней отражающей поверхности (см. Р.Ланг и др. Влияние внешней оптической обратной связи на характеристики полупроводникового инжекционного лазера. Журнал IEEE Квантовая электроника, том QE-16, N 3. март 1980 г). Лазерный диод вместе с внешней отражающей поверхностью, например отражающей целью, можно рассматривать как составной или связанный лазерный резонатор, состоящий из диодного резонатора и внешнего резонатора, образованного отражающей целью и фасеткой лазерного диода, обращенной к цели (например, передней фасеткой). Расстояние от лазера до внешней поверхности должно быть не больше половины длины когерентности (расстояние, на котором фотоны остаются синфазными) выходного света, потому что свет должен оставаться когерентным на всем пройденном расстоянии (то есть до цели и обратно до лазера). Эффекты связанного резонатора в обычных лазерах хорошо известны (см. патент США N 4550410).
Известно также, что если ток, проходящий через лазерный диод, изменяется от одного уровня до другого, под действием этого изменяется оптическая частота, на которой работает лазерный диод (или на которой генерируется когерентное оптическое излучение, называемое также частотой "свободной генерации"). Точнее, когда ток увеличивается, длина волны лазерного диода становится больше, и, таким образом, частота, на которой происходит работа, уменьшается. Это происходит потому, что температура материала лазерного диода изменяется при изменении тока, что вызывает изменение показателя преломления материала, а это вызывает изменение оптической длины пути резонатора Ld (также называемой эффективной длиной диодного резонатора), которая представляет произведение показателя преломления материала лазера и физической длины лазерного резонатора.
Известно также, что, когда оптическая рабочая частота лазера меняется, интенсивность выходного света, испускаемого фасеткой, не обращенной к цели, производит пульсации или волнообразные пульсирования (называемые также "скачками моды"). Эти импульсы интенсивности обусловлены интерференцией когерентных волн внутри лазерного диода между светом, отраженным от цели (который возвращается от фасетки, обращенной к цели), и светом внутри лазерного диода (при условии, что расстояние от лазера до цели остается постоянным). Как известно, импульсы появляются с интервалами рабочей частоты лазера, равными разности частот между последовательными модами внешнего резонатора:
c/2L,
где c - скорость света, а L - расстояние от передней фасетки до цели. Известно также, что эти импульсы легко можно обнаруживать путем дифференцирования сигнала интенсивности света, испускаемого задней фасеткой.
Если от лазерного диода цель находится на расстоянии целого числа длин оптического пути резонатора лазерного диода Ld, имеет место максимальная конструктивная интерференция когерентных волн, и пиковая амплитуда выходных импульсов интенсивности оказывается максимальной. Аналогично этому, если расстояние от цели до лазерного диода является не целым кратным Ld, пиковая амплитуда импульсов уменьшается из-за разрушительной интерференции отраженного света, но ее все еще можно измерять. Таким образом, пиковая амплитуда импульсов интенсивности изменяется при изменении расстояния, но остается все еще измеряемой независимо от того, находится ли цель на расстоянии от лазера, кратном целому числу Ld, или нет, как описано у Ланга и др.
В известных экспериментах измерения расстояния лазерным диодом (как описано у Ланга и др. И Бихейма и др.) использовали известный фотоприемник и соответствующие электронные схемы для измерения света, испускаемого от задней фасетки лазера, и для образования свидетельствующего о нем сигнала напряжения. Сигнал напряжения с приемника анализируется с целью определения информации о расстоянии.
Расстояние L от передней фасетки до цели определяется известным уравнением
L = Nc/2ΔF, (2) ,
где N - количество импульсов интенсивности (или "скачков моды" внешнего резистора), которые появляются на протяжении изменения частоты лазера ΔF ; c - скорость света; ΔF - изменение частоты лазера, обусловленное изменением тока возбуждения лазерного диода. L значительно больше (на несколько порядков амплитуды), чем длина оптического пути резонатора лазерного диода. Таким образом, расстояние L до цели можно определить просто подсчетом количества N "скачков моды", которые происходят в результате изменения частоты лазера ΔF . Теоретическая разрешающая способность при измерении расстояния, как известно, представляет расстояние, соответствующее одному "скачку моды" или
ΔL = c/2ΔF. (3) .
Таким образом, если ΔF = 50 ГГц, то ΔL = 3 мм, что является хорошей разрешающей способностью, как описано у Бихейма и др.
Однако при попытке выполнить измерение расстояния на основании интерференции когерентных волн лазерного диода в реальных условиях возникает множество проблем. Во-первых, одной из самых серьезных проблем при определении с помощью когерентного света являются помехи в виде спеклов. Как известно, помеха в виде спеклов, представляет оптический шум, генерируемый в результате рассеивания когерентного света при попадании его на поверхность, которая является не абсолютно плоской (по шкале длин волн). Кроме того, все цели имеют конечную величину поверхностного колебания, которая увеличивает шум в виде спеклов. Более того, если цель вращается, например, лопасть несущего винта вертолета (подобно описано в находящейся в процессе одновременного рассмотрения заявке на патент США с порядковым N 07/665.061, зарегистрированной 6 марта 1991 г.), имеет место некоторое качание, которое увеличивает также помехи в виде спеклов. Эта помеха интерферирует с когерентным приемом и может вызывать периодическое падение оптической интенсивности в зависимости от расстояния до цели, препятствуя тем самым измерению интенсивности на некоторых расстояниях (то есть выпадение измерений) и делая измерение расстояния надежным.
Во-вторых, Бихейм и др. описали использование нарастающей и спадающей пилообразной формы тока (пилообразного изменения с положительным наклоном, за которым следует пилообразное изменение с отрицательным наклоном) для возбуждения лазерного диода. Однако нарастающее и спадающее пилообразные изменения производят смещение составляющей постоянного тока в дифференцированном сигнале, которое изменяется в зависимости от количества импульсов, обнаруженных в течение данного периода пилообразного изменения, создавая тем самым неравномерные амплитуды импульсов, что может привести к неправильным измерениям расстояния. Более того, нарастающее и спадающее пилообразные изменения могут создавать импульсы интенсивности двух противоположных полярностей, требующие применения электронных схем, детектирующих импульсы обеих этих полярностей. Кроме того, нарастающее и спадающее пилообразные колебания вносят неточность, обусловленную резким изменением наклона формы сигнала (от положительного к отрицательному).
Известно также, что, если цель движется (то есть имеет конечную скорость), в выходном сигнале лазера появляются дополнительные импульсы (с амплитудными характеристиками, аналогичными описанным выше), вызываемые известным эффектом Доплера (называемые доплеровской частотой Fd). Это имеет место независимо от того, происходит ли с течением времени изменение тока возбуждения лазерного диода (то есть оптической частоты лазера) или нет. Следовательно, общее количество импульсов на развертку возбуждающего тока (называемую циклом пилообразного изменения), испускаемых лазером, связано с расстояние (Fx) и скоростью (Fd) цели. Более конкретно, в случае использования сигнала возбуждения в виде нарастающего и спадающего пилообразного изменения тока, когда возбуждающий ток возрастает, а цель движется по направлению к лазеру, количество импульсов, различаемых в обратной связи, равно Fx + Fd. Наоборот, когда ток возбуждения уменьшается, а цель движется по направлению к лазеру, количество видимых импульсов равно Fx - Fd. Если Fd больше, чем Fx (то есть цель движется быстрее определенной скорости), результат соотношения Fx - Fd оказывается отрицательным, а направление импульсов на понимающемся наклоне изменяет полярность, требуя тем самым применения электронных схем для компенсации этого явления. Это требует применения гораздо более сложных и дорогостоящих электронных схем либо на скорость движения цели следует наложить ограничение. Если цель движется от лазера, то вышеприведенные соотношения будут такими же, за исключением того, что знак Fd меняется на обратной для обоих случаев.
Предметы изобретения включают обеспечение основанного на лазере измерения расстояния, при котором снижены помехи в виде спеклов, используется минимальное количество электронных схем, минимизируются неточности, вызываемые разрывами сигнала возбуждения лазера, и не накладываются ограничения на скорость.
В соответствии с изобретением лазер движения цели типа лазерного диода, имеющий переменную рабочую частоту, управляемую сигналом возбуждения лазера, излучает первый выходной свет, который падает на цель. Первый выходной свет рассеивается целью и попадает обратно в лазер; возникает интерференция когерентных волн между рассеянным светом и светом внутри лазера, создавая тем самым второй выходной свет, имеющий интенсивность, определяемую расстоянием от лазера до цели. Второй выходной свет преобразуется в сигнал, пропорциональный только расстоянию до цели; рабочая частота лазера модулируется на скорости, которая минимизирует оптические помехи в виде спеклов.
Далее, в соответствии с изобретением форму сигнала возбуждения лазера выбирают так, чтобы свести к минимуму электронное оборудование. В соответствии еще с одним аспектом изобретения часть оптического сигнала обратной связи не используется (гасится) для предотвращения разрыва измерения расстояния, обусловленного скачкообразными изменениями формы колебания тока (то есть когда происходят разрывы непрерывности интенсивности) и(или) электронным шумом (вызываемым дифференцированием сигнала или другой обработкой сигнала).
В изобретении используются технические приемы, которые повышают точность и реализуемость лазерных датчиков измерения расстояния путем снижения спеклов, минимизирования электроники и минимизирования действия разрывов возбуждения током, которые могут вызывать неточности при измерении расстояния. Изобретение можно использовать для любых применений измерения расстояния, например детектора загораживания заднего хода автомобиля, для определения местоположения тележки подъемника в люке подъемника с целью опускания на настил или для определения высоты полета летательного аппарата. Дополнительное преимущество изобретения заключается в том, что в нем используется когерентный свет; таким образом, оно требует минимального оптического обратного рассеяния (нановатты) и оно не возмущается некогерентным светом типа солнечного света, уличного освещения или автомобильных фар.
Вышеперечисленные и другие цели, особенности и преимущества изобретения станут более очевидными в свете последующего подробного описания вариантов его осуществления.
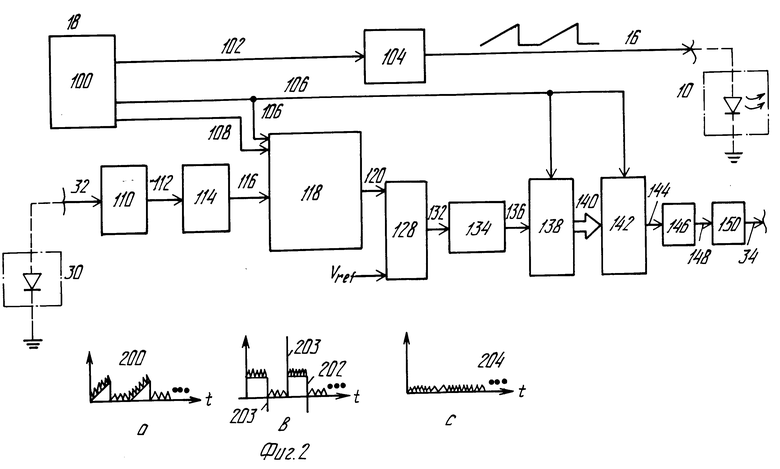
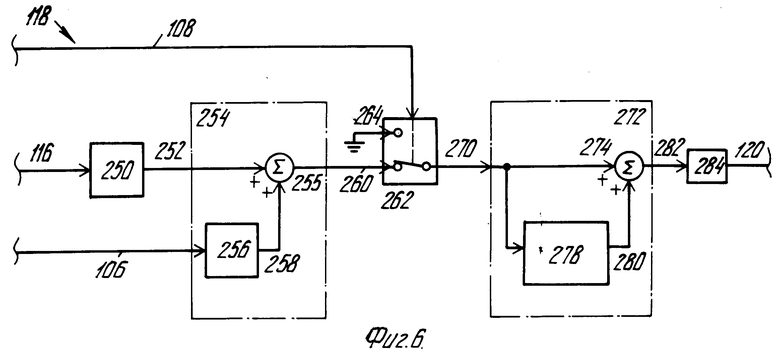
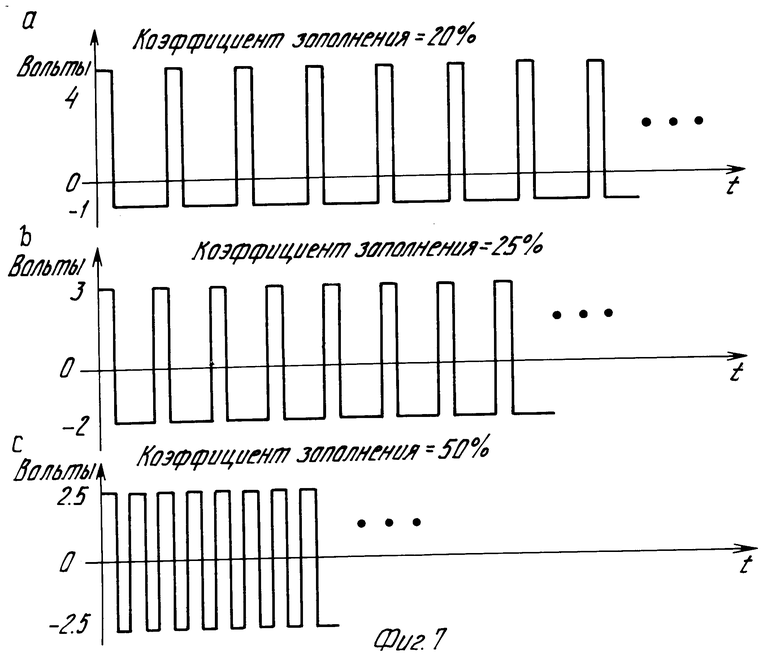
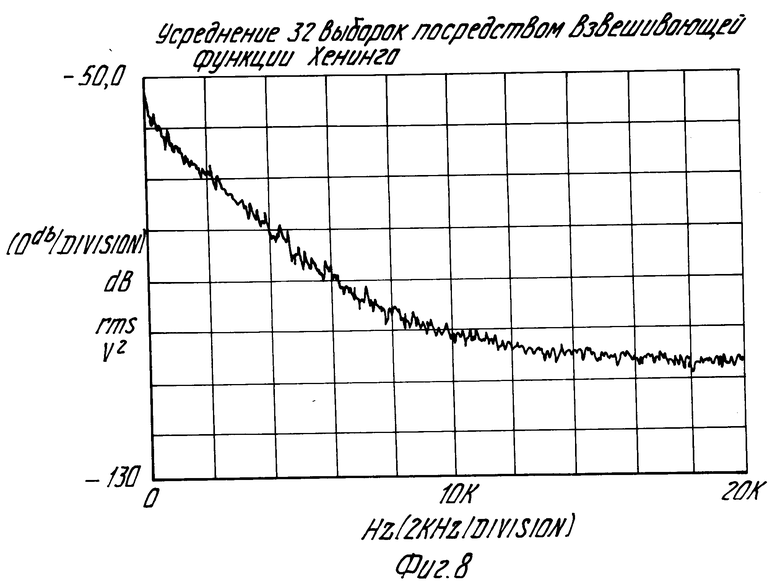
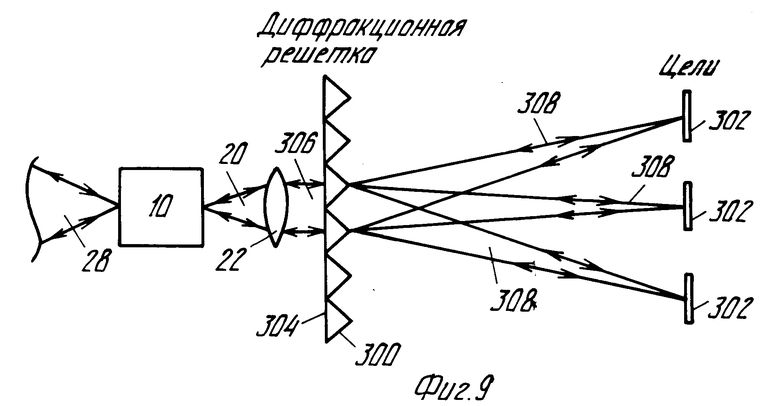
На фиг. 1 представлена принципиальная блок-схема соответствующего изобретению устройства измерения расстояния; на фиг. 2 - принципиальная блок-схема схемы измерения расстояния в показанном на фиг. 1 устройстве измерения расстояния, включающей a - график импульсов, налагаемых на форму возбуждающего сигнала; b - график примерного сигнала, поступающего с фильтра верхних частот, и c - график примерного сигнала, поступающего со схемы согласования устройств по уровню и форме сигнала; на фиг. 3 - принципиальная блок-схема схемы функционального генератора в показанной на фиг. 2 схеме измерения расстояния; на фиг. 4 представлен график сигналов, генерируемых показанной на фиг. 3 схемой функционального генератора; на фиг. 5 представлена принципиальная блок-схема преобразователя ток - напряжение в показанной на фиг. 2 схеме измерения расстояния; на фиг. 6 - принципиальная блок-схема схемы согласования устройств по уровню и форме сигнала в показанной на фиг. 2 схеме измерения расстояния; на фиг. 7 представлены графики примерных сигналов, поступающих с показанного на фиг. 2 фильтра верхних частот, имеющих разные коэффициенты заполнения; на фиг. 8 представлен график помех в виде спеклов в зависимости от частоты, показывающий, что помехи в виде спеклов уменьшаются при увеличении частоты; на фиг. 9 представлена схема, показывающая конфигурацию настоящего изобретения при использовании множества целей.
Лучший вариант выполнения изобретения.
Рассматривая фиг. 1, отметим, что устройство измерения расстояния лазерным диодом включает в себе известный лазерный диод 10, например лазерный диод Мицубиси ML 3101 с встроенным фотодиодом, имеющий переднюю фасетку 12 (или отполированный торец), которая обеспечивает примерно 10%-ное отражение, и заднюю фасетку 14, которая обеспечивает примерно 40%-ное отражение. Как известно, со стороны, имеющей более низкую отражательную способность, выходит больше света. Лазерный диод 10 изготовлен из полупроводникового материала, например алюминиевого арсенида галлия (AlCaAs), и в своей основе включает p - n-переход, то есть легированный акцепторной примесью AlGaAs, монолитно прилегающий к легированному донорной примесью AlGaAs, имеющие разные концентрации соответствующих материалов. Полирование торцов полупроводника способствует образованию явления, известного как френелевское отражение, которое определяет отражательную способность на основании показателя преломления материала. Другими характеристиками лазерного диода являются следующие: длина волны 830 нм, длина когерентности примерно 4 м и выходная мощность примерно 3 мВт. При необходимости можно использовать другие полупроводниковые лазеры при условии, что половина длины когерентности меньше требуемого расстояния до цели (как описано выше), а уровень мощности соответствует расстоянию до цели. Лазерный диод 10 возбуждается сигналом электрического тока по линии 16, поступающим со схемы измерения расстояния 18 (описываемой ниже).
Передняя фасетка 12 лазерного диода 10 излучает расходящийся свет 20 по направлению к известной линзе 22, например микролинзе с измерительной указательной линейкой (линза GRIN) компании "Нипен шит глас компани" (NSG), деталь N W 30-0110-078, имеющий диаметр 3 мм, длину 3,3 мм и антиотражательное покрытие. Обычно линзу 22 располагают на передней фасетке 12 лазерного диода 10 без промежутка между ними. Однако, при необходимости между ними можно обеспечивать промежуток. Линза 22 преобразует расходящийся свет 20 в сфокусированный луч 24. Луч 24 фокусируется на фиксированном расстоянии L1 от линзы 22, например на расстоянии двух футов. Цель 26 находится на переменном неизвестном расстоянии L от передней фасетки 12, изменяющемся от 6 дюймов до 3 футов и 6 дюймов, которое рассчитывается с помощью изобретения. Если нужно, то можно использовать другие диапазоны расстояния L до цели 26 при условии, что лучеиспускательная способность лазера достаточно высокая для обеспечения адекватной оптической обратной связи. В качестве альтернативы вместо сфокусированного луча 24 можно использовать коллимированный пучок при условии, что диаметр достаточно маленький, например, равный 1/16 дюйма, и(или) лучеиспускательная способность достаточно высокая для обеспечения адекватной оптической обратной связи. Когерентный свет от линзы 22, отражаясь от цели 26, возвращается через линзу 22 в лазерный диод 10 через переднюю фасетку 12, где происходит конструктивная интерференция внутри лазерного диода 10, как описано выше. Цель 26 может быть изготовлена из любого материала, например из пластмассы, дерева или металла, при условии, что он рассеивает когерентный свет обеспечиваемой лазерным диодом 10 длины волны.
Задняя фасетка 14 лазерного диода 10 излучает рассеяный свет 28, который падает на фотоприемник 30 (или фотодиод). Выходной свет 28 от задней фасетки 14 создает импульсы интенсивности, связанные с расстоянием L до цели 26, как было описано выше. Лазерный диод 10 и фотоприемник 30 обычно представляют собой один законченный узел. Однако, если нужно, то можно использовать раздельные части. Фотоприемник 30 обеспечивает сигнал электрического тока в линии 32, свидетельствующий об интенсивности падающего на него света 28, поступающий на схему измерения расстояния 18. Схема измерения расстояния 18 преобразует сигнал тока, поступающий по линии 32, в сигнал напряжения в линии 34, свидетельствующий о расстоянии L до цели 26.
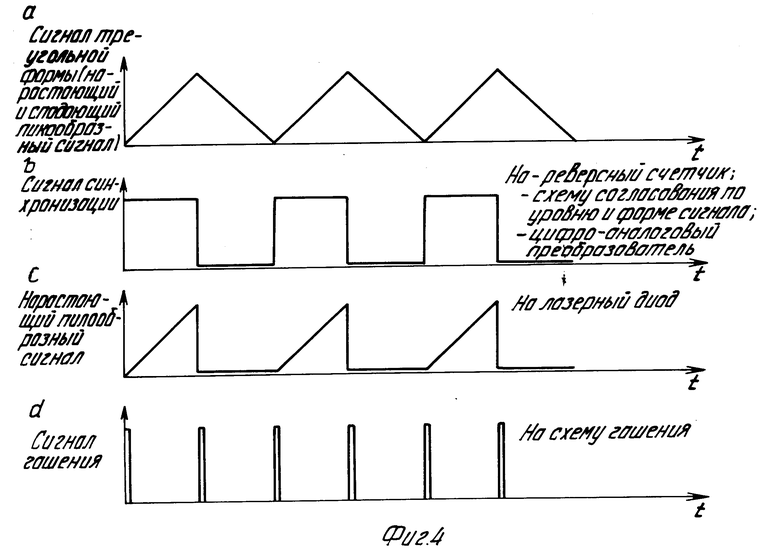
Рассматривая фиг.2, отметим, что схема измерения расстояния 18 включает функциональный генератор 100, который обеспечивает сигнал напряжения в линии 102 для возбудителя лазерного диода 104, например, Милз Гриот, деталь N 06DLD201. Возбудитель лазерного диода 104 преобразует пилообразный сигнал напряжения, который линейно изменяется от 0 до 20 мВ в линии 102, в пилообразный сигнал тока, который линейно изменяется от 29 до 31 мА (фиг.4 C) в линии 16, возбуждающий лазерный диод 10. При необходимости можно использовать другие возбудители лазерного диода и другие диапазоны пилообразного сигнала напряжения и тока. В изобретении лазерный диод 10 возбуждается в активном диапазоне диода волновым сигналом (нарастающим пилообразным изменением) токового возбуждения в линии 16, включающим пилообразное изменение с положительным наклоном, за которым следует скачок вниз с нулевым наклоном (фиг. 4 C), со смещением постоянного тока, равным примерно 30 мА. Если необходимо, то можно использовать другие смещения и диапазоны сигнала. Частота развертки сигнала токового возбуждения в линии 116 равна 1 кГц, однако при необходимости можно использовать другие частоты, как будет описано ниже. Функциональный генератор 100 обеспечивает также синхронизирующий сигнал в линии 106 и сигнал гашения в линии 108 (оба будут описаны ниже).
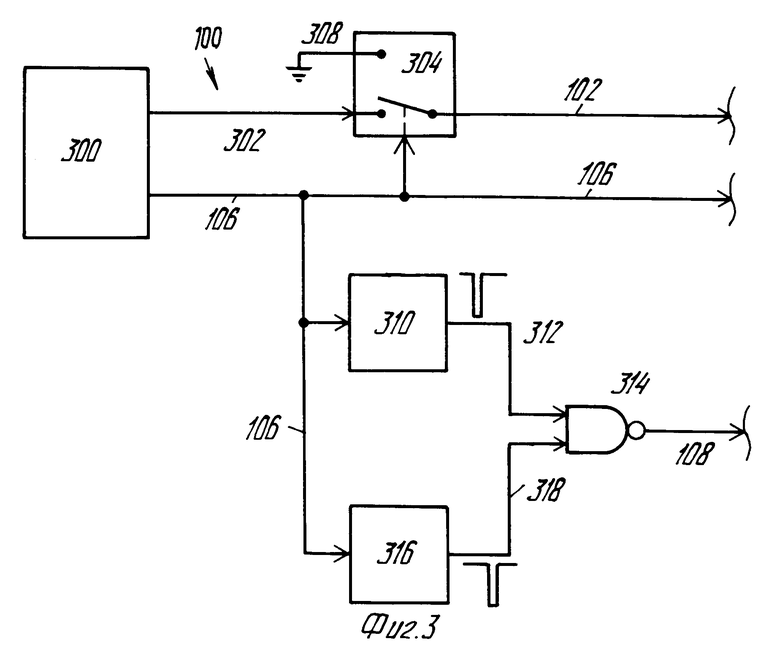
Рассматривая теперь фиг. 3, отметим, что функциональный генератор 100 включает генератор треугольной (нарастающей и спадающей пилообразной) формы сигнала 300, например элемент Интерсил 8038. Генератор линейно изменяющегося напряжения треугольной формы обеспечивает сигнал треугольной формы (фиг.4A) в линии 302 на одном входе переключателя 304, например аналогового переключателя аналоговых устройств, деталь N AD7512. Другой вход переключателя 304 подсоединен к линии 308, которая подсоединена к заземлению (OB). Генератор треугольной формы сигнала 300 обеспечивает также сигнал в форме меандра (или синхронизирующий сигнал, фиг.4B) в линии 106, который, наряду с другими сигналами, подается на переключатель 304. Синхронизирующий сигнал имеет высокий уровень (например, +5 B) во время положительно наклона сигнала треугольной формы и низкий уровень (например, OB) во время отрицательного наклона сигнала треугольной формы (фиг.4A). Когда синхронизирующий сигнал в линии 106 имеет высокий уровень, переключатель 304 подсоединяет сигнал треугольной формы в линии 302 к линии 102. Когда синхронизирующий сигнал в линии 106 имеет низкий уровень, переключатель 304 к линии102 подключает сигнал 0 B. Получаемый в результате сигнал напряжения в линии 102 (фиг.4C) обеспечивает в линии 16 требуемую форму сигнала токового возбуждения лазерного диода со смещением по постоянному току (фиг. 1,2).
Синхронизирующий сигнал в линии 106 подается также на вход фронта первого устройства ждущего мультивибратора 310, например элемент фирмы "Нейшнл семикондакте", деталь N CD4528B, обеспечивающий импульс низкого уровня заранее установленной длительности, например 10 мкс, в линии 312, когда синхронизирующий сигнал меняется от низкого на высокое состояние. Линия 312 подсоединена к одному входу логического элемента И-НЕ 314. Подобным же образом линия 106 подсоединена к входу среза второго устройства ждущего мультивибратора 316, имеющего выходной сигнал в виде импульса низкого уровня в линии 318, когда напряжение синхронизирующего сигнала изменяется с высокого на низкое. Линия 318 подсоединена к другому входу логического элемента И-НЕ 314. Логический элемент И-НЕ 314 обеспечивает выходной сигнал в линии 108, который имеет высокий уровень, когда любой входной сигнал логического элемента И-НЕ 314 имеет низкий уровень. Таким образом, сигнал 108 представляет импульс высокого уровня, когда любой из ждущих мультивибраторов 310 или 316 обеспечивает импульс низкого уровня; в противном случае сигнал имеет высокий уровень. В результате получается форма сигнала (фиг.4D) в виде короткого импульса высокого уровня в начале и конце каждого периода нарастающей пилообразной формы сигнала (фиг.4C и называется сигналом гашения (описываемым ниже).
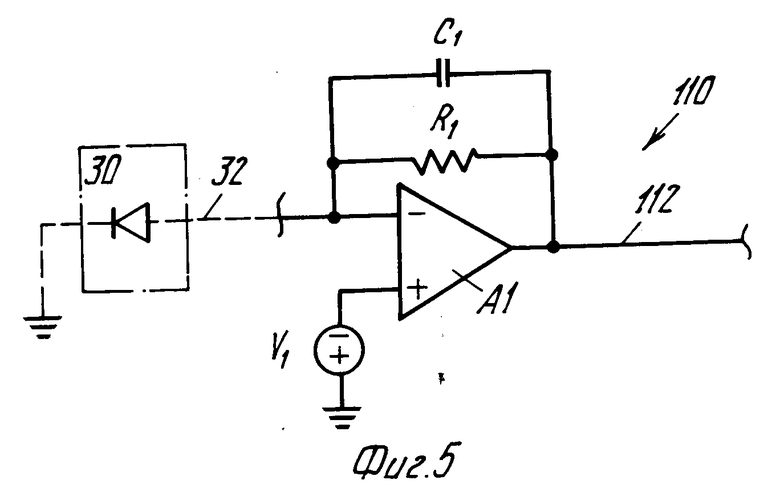
Обращаясь к фиг.2, отметим, что ток с фотоприемника 30 по линии 32 поступает на известный преобразователь ток-напряжение, который преобразует входной ток в выходное напряжение в линии 112, имеющее характеристики, аналогичные характеристикам входного тока, то есть пилообразные изменения и импульсы, соответствующие изменениям интенсивности, но с единицами напряжения. Как показано на фиг.5, преобразователь ток - напряжения 110 включает широкополосный малошумящий операционный усилитель A1, например OP470, фотодиод 30, резистор R1 (например, на 2 кОм), конденсатор C1 (например на 50 пФ) и напряжение смещения V1 (например, 3 B). Выходное напряжение в линии 112 зависит от тока, проходящего через фотодиод 30, величины сопротивления R1 и величины напряжения смещения V1. Конденсатор обратной связи C1 вместе с параллельно подсоединенным резистором R1 служат для снижения высокочастотной помехи путем подавления частот выше 1,6 МГц. Напряжение смещения V1 сдвигает уровень постоянной составляющей выходного напряжения до требуемого уровня. Изменение выходного пилообразного напряжения составляет примерно 150 мВ, что составляет примерно 150 мВ, что соответствует изменению пилообразного тока возбуждения лазерного диода 10 (а следовательно, выходной интенсивности) с 29 до31 мА. Подобно этому импульсы напряжения с пиковым значением в диапазоне от 1 до 2 мВ соответствуют импульсам тока, показывающим описанную ниже оптическую интерференцию когерентных волн. При необходимости можно использовать преобразователь ток - напряжение 110 других конфигураций электронных схем. Сигнал в линии 112 по форме аналогичен сигналу 200 (фиг.2a).
Сигнал напряжения в линии 112 подается на фильтр верхних частот 114, который действует как дифференцирующая схема, предназначенная для отделения высокочастотных импульсов (фиг.2a) от низкочастотного пилообразно нарастающего сигнала (фиг.4C) и усиления их. Более конкретно, фильтр верхних частот 114 представляет однополюсный фильтр с положительной крутизной 20 дБ на декаду, имеющий усиление по постоянному току, равное нулю, и частоту сопряжения 120 кГц, за пределами которой величина усиления фильтра ровная при коэффициенте усиления, равном 10. На выходе фильтра верхних частот 114 обеспечивается дифференцированный сигнал, подобный сигналу, показанному формой сигнала 202 (фиг. 2b). Фильтр 114 изготовлен из операционных усилителей, например OP470, резисторов и конденсаторов по известной схеме с отрицательной обратной связью. В схему могут входить, например, конденсатор на 500 мкФ, последовательно соединенный с резистором на 2,7 кОм, подсоединенный к отрицательному входу, резистор отрицательной обратной связи на 27 кОм и непосредственное соединение положительного входа операционного усилителя с заземлением. При необходимости можно использовать другие конфигурации операционных усилителей и компонентов.
Дифференцированный сигнал с фильтра верхних частот 114 подается по линии 116 на схему согласования устройств по уровню и форме сигнала 118 усиливает сигнал, поступающий по линии 116, например, в 50 раз, устраняет составляющую в виде меандра на формы волны, устанавливает на ноль (или гасит) часть сигнала, сдвигает уровень сигнала по постоянному току с целью обеспечения согласованной величины (OB) для участка сигнала низкого уровня и обеспечивает некоторую ограниченную высокочастотную фильтрацию. Полученный в результате сигнал (фиг. 2C), обеспеченный в линии 120, имеет последовательности импульсов, простирающихся от общего минимального напряжения (эталонная плата), равного примерно 0 В. Если требуется, то можно использовать другие общие минимальные напряжения.
Более конкретно, ссылаясь на фиг.6, отметим, что схема согласования устройств по уровню и форме сигнала 118 включает каскад усилителя 250, содержащий известные электронные схемы типа операционных усилителей и резисторов, которые усиливают дифференцированный сигнал в линии 116 в 50 раз. Если необходимо, то можно использовать другие каскады усиления. Усиленный дифференцированный сигнал подается по линии 252 на схему компенсатора волны в виде меандра 254, который устраняет составляющую волны в виде меандра дифференцированного усиленного сигнала в линии 252 (сравните иллюстрации b и c на фиг. 2). Сигнал в линии 252 подается на первый ход сумматора 255. Синхронизирующий сигнал (фиг. 4B) в линии 106 подается на каскад усиления 256, который смещает амплитуду синхронизирующего сигнала на такую же величину и с противоположным знаком составляющей волны в виде меандра усиленного дифференцированного сигнала в линии 252. Выходной сигнал с каскада усиления 256 подается по линии 258 на второй вход сумматора 255. Сумматор 255 складывает сигналы, поступающие по двум входным линиям 252, 258, и результирующий сигнал, в котором отсутствует компонента волны в виде меандра, поступает в линию 260.
Мы нашли, что, когда токовый сигнал возбуждения диода в линии 16 резко меняет крутизну (то есть обнаруживает нарушение непрерывности), в оптическом сигнале обратной связи появляются высокочастотные гармоники, вызывающие появление дополнительных импульсов в короткий промежуток времени, например, равный 10 мкс вблизи нарушения непрерывности, искажая тем самым измерение расстояния. Мы также нашли, что сигнал в линии 116 дает всплески 203 (фиг. 2b) на фронте и срезе сигнала, обусловленные действиями дифференцирующей схемы фильтра верхних частот 114, и вызывает общий сдвиг уровня сигнала, что приводит к неточности в измерении импульсов. Кроме того, мы нашли, что установка на ноль или гашение сигнала в это время устраняет это искажение измерений без принесения в жертву какой-либо заметной точности.
Сигнал по линии 260 со схемы компенсатора волны в виде меандра 254 поступает на один вход переключателя 262, например аналогового переключателя аналоговых устройств, деталь N AD7512.Другой вход переключателя 262 подсоединен к линии 264, которая соединена с заземлением (OB). Сигнал гашения (фиг. 4D) по линии 108 с функционального генератора 100 также поступает на переключатель 262 и управляет выбором выходного сигнала, обеспечиваемого в линии 270. Когда уровень сигнала гашения высокий, переключатель 262 подсоединяет сигнал со схемы компенсатора волны в виде меандра 254 в линии 260 к линии 270. Аналогично этому, когда уровень сигнала гашения низкий, переключатель 262 подсоединяет к линии 270 сигнал OB, поступающий по линии 260. Как описано выше, сигнал гашения (фиг.4D) создает сигнал небольшой длительности во время нарушений непрерывности нарастающего пилообразного токового сигнала возбуждения (фиг. 4C), то есть на начальном и конечном участках пилообразного изменения. Таким образом, выходной сигнал в линии 270 имеет такую же форму, как и входной сигнал в линии 260, за исключением того, что этот сигнал устанавливают на ЩИ на короткий период времени, например на 10 мкс, в начале и в конце пилообразно изменяющегося тока (что обусловлено импульсами сигнала гашения). Таким образом, эти импульсы фактически гасят сигнал в линии 260. В начале пилообразного изменения может не потребоваться обеспечивать импульс, если этот участок пилообразного сигнала возрастает с очень малой скоростью, так что в оптический сигнал обратной связи, рассеиваемый от цели 26, не вносятся никакие высокочастотные компоненты, а фильтр верхних частот не генерирует всплесков.
Схема согласования устройств по уровню и форме сигнала 118 включает также схему восстановления постоянной составляющей, на которую поступает сигнал по линии 270, которая смещает входной сигнал так, что участок сигнала с низким значением амплитуды всегда имеет одинаковую величину, равную, например, OB. Сигнал в линии 270 подается на первый вход сумматора 274, а также на детектор отрицательных пиков 278. Детектор отрицательных пиков 278 обеспечивает положительный сигнал в линии 280, свидетельствующий о средней наименьшей величине (например, в течение прошедших 2 мс) входного сигнала. Сигнал по линии 280 подается на второй вход сумматора 274, смещая тем самым вверх сигнала в линии270 на величину, на которую он был ниже 0 В. Полученный в результате сигнал поступает в линию 282.
Для иллюстрации необходимости использования схемы восстановления постоянной составляющей 272 на фиг. 7 показано, что, когда изменяется коэффициент заполнения формы волны (то есть процент длительности импульса увеличивается по сравнению с общим периодом), изменяется уровень постоянной составляющей сигнала. Однако, поскольку выходной сигнал фильтра верхних частот 114 имеет постоянную составляющую, равную 0, средняя величина выходного сигнала всегда будет нулевой независимо от коэффициента заполнения. Это значит, что, по-видимому, импульсы, имеющие одну и ту же амплитуду, будут иметь различную амплитуду при сравнении с одним и тем же опорным уровнем, например O B, как показано на фиг. 7, вызывая тем самым неверный счет импульсов. Сигнал в линии 282 будет аналогичным форме сигнала, показанной на фиг. 7, за исключением того, что самый нижний участок формы сигнала сместится вверх к уровню O B. При необходимости можно использовать другие полярности сигналов.
Сигнал со схемы восстановления постоянной составляющей 272 по линии 282 подается на известный фильтр нижних частот 284, включающий операционные усилители, резисторы и конденсаторы, собранный по известной схеме с отрицательной обратной связью. Частота сопряжения фильтра 284 равна 1 МГц. Фильтр устраняет нежелательный высокочастотный шум из сигнала до его подачи на остальную часть схемы в линии 120. При необходимости можно использовать другой фильтр нижних частот или не использовать его вообще в зависимости от величины и частоты появления шума. Если необходимо, то можно использовать другие конфигурации схемы согласования устройств по уровню и форме сигнала 118 или какой-либо ее части.
Сигнал по линии 120 со схемы согласования устройств по уровню и форме сигнала 118 подается на первый вход схемы компаратора 128. На второй вход схемы компаратора 128 по линии 130 подается сигнал опорного напряжения Vref. Величину опорного сигнала устанавливают на заранее определенный уровень, например, при использовании делителя напряжения, - выше минимального уровня шума дифференцированного импульсного запирающего сигнала в линии 126 и ниже самого маленького пикового значения импульсов, ожидаемых во входном сигнале. Компаратор обеспечивает выходной сигнал в линии 132, имеющей либо низкое, например O B, либо высокое состояние, например 5B. Когда величина входного сигнала в линии 126 больше величины опорного напряжения в линии 130, выходной сигнал схемы компаратора 128 в линии 132 имеет высокий уровень. И наоборот, когда величина выходного сигнала меньше величины опорного сигнала, выходной сигнал схемы компаратора 128 в линии 132 имеет низкий уровень. Схема компаратора 128 включает известный компаратор, например LM211H, с добавлением положительной обратной связи для обеспечения жесткого режима возбуждения, например напряжения ± 5 мB, к установленной пороговой величине посредством опорного сигнала, устраняя таким образом изменение состояния выходного сигнала, вызываемое паразитными шумами. Схема компаратора 128 обеспечивает также импульсы, имеющие более равномерную выходную амплитуду, например 5 B, и меньший шум, чем выходной сигнал в линии 126. Если необходимо, то можно использовать другие конфигурации схем компаратора 128.
Сигнал со схемы компаратора 128 по линии 132 подается на известный формирователь импульсов 134, включающий, например, буферный каскад триггера Шмитта или ждущий мультивибратор. Формирователь импульсов 134 обеспечивает сигнал в линии 136, который чаще сигнала, поступающего с компаратора 128 по линии 132, то есть импульсы более прямоугольные, а края более вертикальные.
Выходной сигнал формирователя импульсов 134 по линии 136 поступает на известный 12-разрядный реверсивный цифровой счетчик 138 типа трех последовательно включенных 4-разрядных счетчиков 74LS169B. Реверсивный счетчик подсчитывает количество импульсов либо в направлении увеличения (каждый принятый импульс дает увеличение показания счетчика на единицу счета), либо в направлении уменьшения (каждый принятый импульс уменьшает показание счетчика на единицу счета), как это установлено синхронизирующим сигналом, поступающим по линии 106 с генератора пилообразного напряжения 100, то есть высокий уровень сигнала в линии 106 заставляет счетчик 138 считать в сторону увеличения, а низкий уровень сигнала заставляет его считать в сторону уменьшения. Во время положительного наклона нарастающей пилообразной формы сигнала (фиг. 4C)синхронизирующий сигнал в линии106 имеет высокий уровень, и реверсивный счетчик прибавляет один отсчет при появлении каждого импульса в сигнале, поступающем по линии 136 с формирователя импульсов 134. Подобным же образом во время участка с нулевым наклоном нарастающего пилообразного сигнала синхронизирующий сигнал в линии 106 имеет низкий уровень, и реверсивный счетчик отнимает один отсчет при появлении каждого импульса на этом участке формы волны. Таким образом, результирующее количество отсчетов в счетчике после одного периода развертки нарастающей пилообразной формы сигнала равно разности между количеством импульсов на участке положительного наклона входного сигнала (фиг. 2a, свидетельствующем о расстоянии до цели 26 и о ее скорости движения) в лини 112 и количеством импульсов на плоском участке того же сигнала (свидетельствующем о скорости движения цели 26). Таким образом, счетчик обеспечивает цифровой двоичный сигнал N, пропорциональный расстоянию L до цели, как описано выше (т. е. L = Nc/2ΔF). Если необходимо, то можно использовать счетчики других размеров, однако при выборе размера счетчика необходимо учитывать максимальное количество появляющихся импульсов и период времени на каждую развертку формы волны.
Значение цифрового двоичного сигнала со счетчика подается по множеству линий 140, по одной для каждого разряда, например по 12 линиям, на схему цифроаналогового преобразователя 142, включающую входной буферный каскад, например элемент 74LS174, и цифроаналоговый преобразователь, например деталь N DAC80P аналоговых устройств. Схема цифроаналогового преобразователя 142 преобразует двоичный цифровой сигнал, поступающий по линиям 140 с реверсивного счетчика 138, в соответствующий ему аналоговый сигнал в линии 144. Схема цифроаналогового преобразователя 142 осуществляет преобразование каждый раз, когда принимает фронт синхронизирующего сигнала (фиг.4B) по линии 106 с генератора пилообразного напряжения 100. При проявлении фронта синхронизирующего сигнала цифровой двоичный сигнал, поступающий по линиям 140, фиксируется буферным устройством в схеме цифроаналогового преобразователя 142, предотвращая тем самым воздействие последующих изменений счета в реверсивном счетчике на цифроаналоговое преобразование до появления следующего фронта синхронизирующего сигнала.
Аналоговый выходной сигнал схемы цифроаналогового преобразователя 142 подается по проводу 144 на известный фильтр нижних частот 146. Фильтр нижних частот 146 включает операционный усилитель, резисторы и конденсаторы, скомпанованные по известной схеме с отрицательной обратной связью. Частота сопряжения фильтра низких частот равна 3 Гц, однако при необходимости можно использовать другие частоты. Фильтр нижних частот 146 обеспечивает в линии 148 сигнал, свидетельствующий о средней величине аналогового сигнала в линии 144, обеспечивая таким образом усредненный аналоговый сигнал напряжения, пропорциональный расстоянию L до цели 26.
Сигнал по линии 148 подается на каскад усилителя 150, который умножает величину сигнала, поступающего по линии 148, на заранее установленное значение, например на величину c/2ΔF , с целью обеспечения сигнала в линии 152, указывающего расстояние L до цели в требуемых единицах, например в футах.
Рассмотрим теперь фиг. 8. Известно, что при возбуждении лазерного диода 10 возбуждающим сигналом постоянного тока (то есть в случае лазера, работающего на постоянной оптической частоте) величина составляющей помех в виде спеклов (в дБ/Гц) в цепи оптической обратной связи уменьшается с ростом частоты, то есть составляющая шума сигнала обратной связи в линии 32 (фиг. 1) обнаруживает частотный спектр, который имеет большую энергию амплитуд на низких частотах и малую энергию амплитуд на высоких частотах. Мы нашли, что путем увеличения частоты развертки пилообразной формы токового сигнала снижается амплитуда шумов в виде спеклов (аналогично частотному спектру). Уменьшенный шум в виде спеклов снижает общий уровень шума в сигнале обратной связи и позволяет схеме компаратора 128 (фиг. 2) определять правильное количество импульсов, обусловленных расстоянием до цели, и (или) скорость пилообразного изменения либо плоского участка сигнала обратной связи. При применениях тока, например при применении нарастающего и спадающего пилообразного сигнала возбуждения, используют частоты развертки менее 100 Гц. Используемая здесь частота пилообразной развертки равна 1 кГц, которую при необходимости можно увеличить до 20 кГц и выше, чтобы обеспечить еще большее уменьшении спеклов. Чем выше частота пилообразного сигнала, тем меньше помехи в виде спеклов и, таким образом, больше точность измерения расстояния. В увеличении частоты развертки ограничивающим параметром служит лишь быстродействие электронных схем. Показанные на фиг. 8 помехи в виде спеклов были получены при использовании анализатора непрерывного по времени спектра усредняющего 32 выборки посредством взвешивающей функции Хеннинга.
Рассматривая теперь фиг. 9, отметим, что специалистам в данной области техники должно быть понятно, что изобретение можно использовать для определения расстояния до одной или множества целей 300 посредством распространения света в боковых направлениях с использованием дифракционной решетки 302, имеющей неотражающую поверхность 304. В этом случае линзу 22 помещают на таком расстоянии от лазерного диода, чтобы обеспечить коллимированный пучок 306, направляемый на дифракционную решетку 300, которая преобразует свет в множество рассеянных в боковых направлениях сфокусированных лучей 308. Цепь, находящаяся ближе всех к линзе 22, создает импульсы с самой большой величиной интенсивности в оптическом сигнале обратной связи. Следовательно, для расчета расстояния до ближайшей цели можно использовать компаратор с переменной пороговой величиной и множество компараторов с разными пороговыми величинами (в идеальном случае для использования в качестве детектора соударений). В качестве альтернативы дифракционную решетку 300 можно объединить с линзой 22 в виде одного узла. Вместо решетки 300 для диспергирования света можно использовать одну или больше призм или расщепители луча, или вращающиеся элементы. Кроме того, на пути отдельных лучей можно помещать оптические выключатели типа управляемых электронным путем поляризаторов для включения и выключения лучей.
Как описывалось выше, направление движения цели определяет полярность импульсов дифференцированного сигнала (то есть располагаются ли импульсы в положительном или отрицательном направлении). В частности, когда цель движется по направлению к лазеру, импульсы, обусловленные скоростью, появляются в положительном направлении, а когда движется от лазера, импульсы, обусловленные скоростью, появляются в отрицательном направлении. Следовательно, даже, хотя описано использование изобретения для случая движения цели в одном направлении, то есть в направлении к лазеру, специалистам в данной области техники должно быть понятно, что эти электронные схемы легко можно видоизменить с целью использования для определения целей, движущихся в любом направлении, то есть определения импульсов как положительного, так и отрицательного направления.
Специалистам в данной области техники должно быть понятно, что существует много других известных приемлемых конфигураций схем, предназначенных для выполнения функций обработки сигнала, осуществляемых схемой измерения расстояния 18, то есть выделения импульсов и определения количества импульсов на период пилообразного сигнала. Кроме того, даже, хотя изобретение показано выполненным с использованием аппаратных электронных устройств, для специалистов в данной области техники должно быть ясно, что изобретение может функционировать одинаково хорошо, если схемы аппаратного обеспечения 108, 114, 118, 122, 128, 134, 138 заменить компьютером с программным обеспечением и добавить аналого-цифровой преобразователь для преобразования сигнала в линии 112 в цифровые двоичные разряды.
Хотя изобретение описано с использованием полупроводникового диода, оно может функционировать одинаково хорошо с любым лазером, имеющим оптическую рабочую частоту, которую можно изменять (или модулировать) в приемлемом диапазоне, и другие характеристики, подходящие для измерения расстояния (описываемого выше).
Вместо использования нарастающего пилообразного сигнала изобретение, в котором используются высокие частоты развертки для уменьшения спеклов и (или) гашения сигнала, можно выполнять с любой формой сигнала возбуждения лазера. Кроме того, вместо устранения участка волны в виде меандра из дифференцированного сигнала импульсы можно отделять от формы сигнала возбуждения до другого согласования по уровню и форме сигнала типа дифференцирования. Более того, вместо подсчета импульсов можно анализировать сигнал обратной связи используя известный анализатор спектра частот, а затем преобразуя полученную в результате частоту в количество импульсов в сигнале обратной связи, зная время, в течение которого анализировался сигнал. Однако следует понимать, что импульсы могут находиться не на равных расстояниях друг от друга, обеспечивая тем самым широкий спектр частот, из которого надлежит выделить частоту импульсов.
В качестве других патентов, касающихся оптического когерентного измерения расстояния, следует указать патент США N 4733604.
Хотя изобретение описано и показано на фигурах относительно примерных вариантов его осуществления, специалистам в данной области техники должно быть ясно, что можно выполнять упомянутые и различные другие изменения, опускания и добавления, не выходя при этом за рамки объема притязаний настоящего изобретения.
Изобретение относится к оптическим системам и может быть использовано для измерения расстояний. Устройство содержит лазер со средством возбуждения, обеспечивающим изменение рабочей частоты лазера для борьбы с помехами в виде спеклов. Излученный сигнал, отражаясь от цели, интерферирует в лазере, выполненном в виде лазерного диода, что приводит к излучению сигнала в сторону, противоположную направлению на цель, в виде импульсов интенсивности. Детектирование этого сигнала обеспечивает выработку сигнала обратной связи, в котором содержится информация о расстоянии до цели. Сигнал возбуждения лазера определяется частотой развертки 14000 Гц и выше, а форма сигнала возбуждения представляет собой последовательность отдельных пилообразных участков, перемежающихся опущенными вниз плоскими участками наклона. В устройстве обеспечивается гашение части сигнала обратной связи для уменьшения воздействия разрывов непрерывности сигнала возбуждения лазера на показания измерителя расстояния. 5 з.п. ф-лы, 9 ил.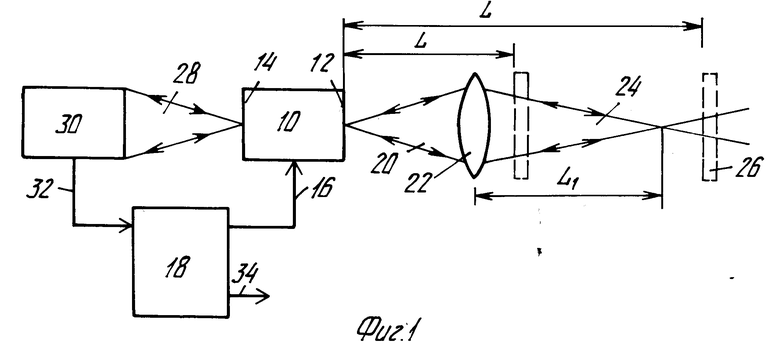
| EP, заявка, 0235034, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| G.BEHEIM et all | |||
| Range Tinding Using Treguency-Modulated Laser Diode | |||
| Applied Optics | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| US, патент, 4550410, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
