Изобретение относится к области измерений, в частности к контролю положения подкрановых путей в плане преимущественно мостовых кранов.
Известно устройство [1] для измерения линейных размеров, содержащее измерительный элемент, закрепленный на одном его конце базирующий элемент и натяжное приспособление, закрепленное на другом конце измерительного элемента, выполненное в виде ползуна и взаимодействующей с ним подпружиненной вдоль своей оси втулки, снабженной зажимными элементами.
Недостатком устройства является то, что оно не обеспечивает точности определения расстояний, преимущественно контроля положения подкрановых путей мостовых кранов в плане. Это объясняется тем, что измерительный элемент выполнен жестким и при определении расстояния на больших пролетах его прогиб приведет к существенной погрешности измерений. Кроме того, известное устройство не позволяет проводить измерения при перемещении крана.
Наиболее близким по технической сущности к заявляемому изобретению является устройство [2] для определения расстояния между двумя расположенными на одном уровне точками, содержащее по крайней мере одну гибкую нить определенной длины, базирующие элементы, к которым прикреплены концы нити и отсчетный узел.
Недостатком устройства является низкая точность контроля, неудобство эксплуатации, невозможность записи показаний отсчетного узла. Это объясняется сложностью визуального снятия показаний отсчетного узла при использовании устройства на больших высотах, а также отсутствием устройства для записи результатов измерений при перемещении крана.
Сопоставительный анализ с прототипом показывает, что заявляемое устройство дополнительно содержит упругие элементы для связи концов гибкой нити с соответствующими базирующими элементами, на одном из которых установлен отсчетный узел, выполненный в виде оптоэлектронного преобразователя, на корпусе которого жестко установлена стойка с шарнирно подвешенным на ней отражателем, оптически связанным с оптоэлектронным преобразователем и соединенным при помощи тяги с одним из упругих элементов.
Кроме того, оптоэлектронный преобразователь содержит источник направленного излучения и оптически связанный через систему фокусировки с первым входом блока обработки информации экран, причем выход блока обработки информации связан с входом блока записи информации.
Кроме того, отражатель выполнен в виде равнобедренной зеркальной призмы из оптического стекла, имеющей прозрачное основание, которое обращено в сторону оптоэлектронного преобразователя, а зеркальные грани наклонены к основанию под углом 45oC.
Кроме того, блок обработки информации содержит последовательно соединенные телекамеру, блок предварительной обработки информации, блок ввода, вычислительный блок и блок вывода, причем выход блока вывода соединен с входом блока записи информации.
Таким образом, заявляемое устройство соответствует критерию "новизны".
Сравнение заявляемого устройства с другими техническими решениями показывает, что все элементы устройства широко известны. Однако их использование в указанной связи для определения расстояния между двумя расположенными на одном уровне точками, преимущественно для контроля положения подкрановых путей мостовых кранов в плане, приводит к увеличению точности и сокращению времени контроля.
Увеличение точности определения расстояния между двумя расположенными на одном уровне точками, преимущественно для контроля положения подкрановых путей мостовых кранов в плане обеспечивается применением в качестве отсчетного узла оптоэлектронного преобразователя, который позволяет контролировать смещение отраженного от равнобедренного зеркального отражателя луча, при применении телекамеры, с точностью, равной ее разрешающей способности. Кроме того, повышение точности обеспечивается за счет совмещения в оптоэлектронном преобразователе источника направленного излучения и оптически связанного через систему фокусировки с первым входом блока обработки информации экраном, причем выход блока обработки информации связан с входом блока записи информации, что позволяет использовать отражатель, выполненный в виде равнобедренной зеркальной призмы из оптического стекла, имеющей прозрачное основание, которое обращено в сторону оптоэлектронного преобразователя, а зеркальные грани наклонены к основанию под углом 45oC.
Сокращение времени процесса контроля расстояния в плане обеспечивается в следствие использования в оптоэлектронном преобразователе блока обработки информации, который содержит последовательно соединенные телекамеру, блок предварительной обработки информации, блок ввода, вычислительный блок и блок вывода, причем выход блока вывода соединен со входом блока записи информации, что позволяет совместить процесс контроля расстояния и записи результатов с перемещением базирующих элементов устройства. Кроме того, для расшифровки данных результатов измерений блок записи информации может быть подключен к вычислительной машине.
Все вышеперечисленное позволяет сделать вывод о соответствии технического решения критерию "существенные отличия".
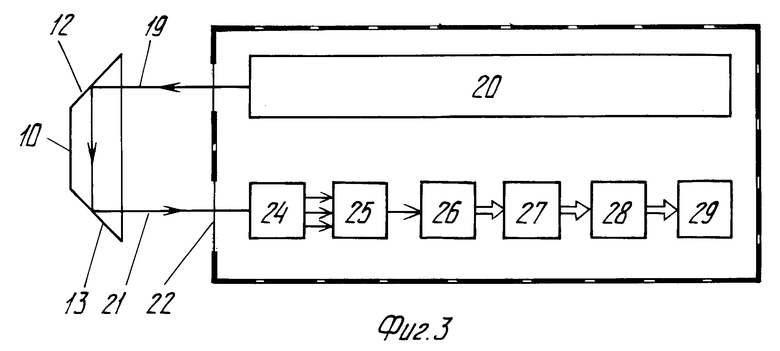
На фиг. 1 показана схема устройства для определения расстояния между двумя расположенными на одном уровне точками, преимущественно для контроля положения подкрановых путей мостовых кранов в плане; на фиг.2 - схема, поясняющая работу устройства с применением призматического зеркального отражателя; на фиг. 3 - схема оптоэлектронного преобразователя; на фиг. 4 - схема блока предварительной обработки информации; на фиг. 5 - схема присоединения тяги к оптическому отражателю и упругому элементу; на фиг. 6 - вариант узла крепления упругих элементов к базирующим.
Устройство (фиг. 1) состоит из двух базирующих элементов 1 и 2, упругих элементов 5 и 6 в виде цилиндрических пружин растяжения, которые связаны с концами гибкой нити 7 определенной длины и через кронштейны 3 и 4 с соответствующими базирующими элементами. На базирующем элементе 1 установлен отсчетный узел в виде оптоэлектронного преобразователя 8, на стойке 9 которого шарнирно закреплен отражатель 10 в виде равнобедренной зеркальной призмы, который, в свою очередь, соединен тягой 11 с пружиной 5. Оптическая ось источника направленного излучения (фиг. 3) пересекает плоскость 12 одной из зеркальных граней, а оптическая ось приемника излучения пересекает плоскость 13 второй зеркальной грани призмы.
Устройство в процессе его использования для контроля подкрановых путей мостовых кранов работает следующим образом. Размечают подкрановые пути в точках контроля. Базирующие элементы 1 и 2 устанавливают на рельсы подкранового пути 14 в месте, в котором расстояние между вертикальными осями головок рельсов известно, и с помощью тяг 15 и 16 соединяют с мостом крана 17. С помощью пружины 6 гайкой 18 производят натяжение гибкой нити 7 таким образом, чтобы луч 19 (фиг. 3) источника направленного излучения 20 проходил через плоскость 12 призмы 10, а отраженный от вертикальной грани 13 луч 21 попадал на экран 22. Окончательную настройку производят регулировочным винтом 23 (фиг. 5) так, чтобы положение пятна отраженного луча было наиболее близко к центру экрана. После настройки устройства до начала движения в блоке обработки информации фиксируется положение пятна отраженного луча (нулевой отсчет). При движении крана по подкрановым путям в результате отклонения последних от базового положения в плане происходит сжатие либо растяжение пружины 5, которое преобразуется посредством тяги 11 в угловое перемещение призматического отражателя, шарнирно закрепленного на стойке 9. Смещение одного или другого, либо обоих рельсов кранового пути от нормального положения на величину δH приводит к повороту призматического отражателя 10 относительно точки подвеса на угол δQ, что, в свою очередь, приводит к отклонению отраженного луча 21 на тот же угол δQ, т. е. величина отклонения δH′, отраженного луча будет пропорциональна величине смещения δH, и может быть определена из соотношения
δH′ = R×K/δH′ (1) ,
где
R - расстояние между вертикальной торцевой поверхностью оптоэлектронного преобразователя и вертикальной осью, проходящей через точку подвеса отражателя; K - размер держателя призмы.
В размеченных точках подкранового пути производят запись результатов измерений. При этом фиксируется отклонение δH′ от центра экрана пятна отраженного луча при наличии смещения подкранового пути от базового положения в плане.
В блоке обработки информации вычисляется межосевое расстояние подкранового пути в плане по зависимости
L = a±δH, (2)
где a - известное межосевое расстояние в начальный момент измерения.
Вычисленные значения заносятся в память блока записи информации.
Блок обработки информации состоит из телекамеры 24, блока 25 предварительной обработки информации, блока 26 цифрового ввода информации, блока 29 записи информации, причем первый, второй и третий выходы телекамеры соединены с первым, вторым и третьим входами блока предварительной обработки информации, выход последнего соединен с первым входом блока цифрового ввода информации, выход которого соединен с входом вычислительного блока, а его выход - с входом блока вывода информации, выход блока вывода информации - с входом блока записи информации.
Блок обработки информации работает следующим образом. Положение светового пятна на экране 22 считывается телекамерой, причем оптическая ось телекамеры всегда перпендикулярна плоскости экрана и проходит через его центр. На выходах телекамеры формируются сигналы - на первом fk - кадровой синхронизации, на втором fc - строчной синхронизации и на третьем fs - значения видеосигнала. Эти сигналы подаются на первый, второй и третий входы блока предварительной обработки информации. В блоке видеосигнал преобразуется в цифровые сигналы X0, X1, X2,..., Xn, каждый из которых состоит из одноразрядного кода сигнала, считываемого со строки X0, и многоразрядного кода адреса строки X1, X2,..., Xn. Сигнал X0 принимает значение "0", если в пределах строки не было сигнала высокого значения, и "1", если он был.
На входе блока предварительной обработки информации формируется код Aj суммы номеров строк, в пределах которых был сигнал с выхода fs, который соответствовал уровню логической единицы, и код Bj количества строк, в пределах которых видеосигнал соответствовал логической единице. Формирование этих кодов происходит к моменту времени, соответствующему кадровому синхроимпульсу fk. Эти коды через блок ввода вводятся в вычислительное устройство, где вычисляется координата Xj - центра светового пятна на экране в пределах данного кадра:
Xj = Aj/Bj
Указанные значения Xj, равные δH′, в вычислительном блоке преобразуются в значения δH и межосевое расстояние по зависимостям (1) и (2) и через блок вывода 28 заносятся в память блока 29 записи информации в точках разметки подкранового пути.
Блок предварительной обработки информации (фиг. 4) состоит из счетчика 30, порогового элемента 31, триггера 32, первого блока схем И 33, второго счетчика 34, накапливающего сумматора 35 второго 36 и третьего 37 блоков схем И, причем первый выход - выход кадровой синхронизации блока 24 (телекамеры) - соединен с выходами установки в "0" первого и второго счетчиков, накапливающего сумматора и общими входами второго и третьего входов схем И, второй вход - выход строчной синхронизации блока 24 соединен с четным входом первого счетчика и первым входом триггера, выход которого соединен с четным входом второго счетчика, параллельные выходы второго счетчика соединены с входами второго блока схем И, параллельные выходы первого счетчика соединены с входами первого блока схем И, выходы которого соединены с входами накапливающего сумматора, а его выходы - с входами второго блока схем И, выходы второго и третьего блоков схем И соединены с первым входом блока ввода информации.
Блок работает следующим образом. Сигнал кадровой синхронизации устанавливает счетчики 30 и 34 в нулевое состояние, сигнал строчной синхронизации, поданный на счетный вход счетчика 30 позволяет сформировать для каждой строки ее номер в двоичном коде и устанавливает триггер в состояние "0". Видеосигнал с третьего выхода телекамеры блока 24, квантованный на восемь уровней подается на вход порогового элемента, порог которого выбран так, чтобы слабые видеосигналы, обусловленные боковыми засветками объектива, не пропускались на вход триггера. Тогда при наличии засвеченной области в пределах строки (шага сканирования) на выходе порогового элемента будет сформирован сигнал логической "1", этот сигнал подается на счетный вход счетчика 34, в котором будет формироваться код числа строк, в пределах которых было световое пятно с экрана.
Одновременно сигнал логической "1" с триггера подается на общий вход первого блока схем И, на вторые входы первого входа схем И, на выходах которого будут последовательно формироваться коды номеров строк, соответствующих засвеченной области экрана, которые подаются на вход накапливающего сумматора, устанавливаемого на "0" сигналом кадровой синхронизации. В сумматоре в пределах кадра будет сформирован код суммы номеров строк, соответствующих засвеченной области экрана Aj, а в счетчике 34 - код числа строк Bj, соответствующих засвеченной области экрана.
Причем в зависимости от условий распространения излучения квантового генератора величины Aj и Bj могут быть различны. Но их отношение, вычисленное в блоке 27, будет соответствовать центру области засветки экрана. Сигнал с накапливающего сумматора второго счетчика через второй и третий блок схем И сигналом кадровой развертки считывается на первый вход блока ввода информации.
Все устройство реализовано на стандартных элементах. Источник монохроматического направленного излучения - квантовый генератор ЛГ - 72-1, блок ввода - стандартное устройство 15 КА - 60/8-0/0, вычислительный блок 15 ВТ-16-012, устройство вывода "И-2" 15 КС-180-032, блок записи информации - микросхемы энергонезависимой памяти 16-01 РР1 или 573 РУ 10.
Источники информации:
1. SU, авторское свидетельство N 1546828, кл. G 01 B 5/14, 1990.
2. SU, авторское свидетельство N 1163131, кл. G 01 B 5/14, 1985.




Устройство для определения расстояния между двумя расположенными на одном уровне точками, преимущественно для контроля положения подкрановых путей мостовых кранов, относится к области измерений. Устройство содержит одну гибкую нить определенной длины, концы которой соединены через упругие элементы с базирующими элементами, в одном из которых установлен отсчетный узел, выполненный в виде оптоэлектронного преобразователя с шарнирно закрепленным на нем отражателем, оптически связанным с преобразователем и с помощью тяги - с одним из упругих элементов. Отражатель может быть выполнен в виде равнобедренной зеркальной призмы из оптического стекла с прозрачным основанием, обращенным в сторону оптоэлектронного преобразователя, и зеркальными гранями, наклоненными под углом 45o. Увеличение точности контроля обеспечивается применением в качестве отсчетного узла оптоэлектронного преобразователя, совмещающего в себе источник и приемник направленного излучения, что позволяет использовать равнобедренную зеркальную призму, а при использовании в качестве приемника излучения телекамеры обеспечить точность, равную ее разрешающей способности. Сокращение времени процесса контроля обеспечивается использованием в оптоэлектронном преобразователе, кроме блока обработки информации, блока записи информации, что позволяет совместить процесс контроля и записи результатов с перемещением базирующих элементов. 3 з.п. ф-лы, 6 ил.

