Изобретение относится к экспериментальной гидродинамике корабля и морских инженерных сооружений и касается оборудования для проведения гидродинамических испытаний моделей в опытовом бассейне.
Известно устройство для буксировочных испытаний моделей судов в опытовом бассейне [1], содержащее жестко закрепленную на буксировочной тележке раму, по горизонтальным направляющим которой перемещается каретка, связанная с динамометром и снабженная роликами, в которых находится вертикальная штанга, соединенная с буксируемой в канале бассейна моделью, принятое нами за прототип.
Недостатком известного устройства является ограниченность диапазона моделируемых процессов и воспроизводимых динамометром частот внешних гидродинамических сил, ограниченность компонент силовой нагрузки. Известное устройство не позволяет поэтому проводить испытания судов и морских инженерных сооружений (например, ледостойких буровых платформ) в динамическом режиме разрушения ледового покрова и консолидированных торосистых перемычек. Особые трудности возникают при испытаниях крупногабаритных моделей плохообтекаемых морских сооружений в ледовых условиях, ввиду значительных по величине сил и моментов, действующих на модель, и недостаточной жесткости как самой экспериментальной установки, выполненной как одноопорная конструкция, так и буксируемой модели, связанной с динамометром в ограниченной области крепления штанги. При этом в процессе ломки ледового поля возникают значительные по амплитуде низкочастотные колебания модели относительно опоры крепления буксировочной штанги. Вследствие чего искажаются физические процессы ломки льда и нарушается достоверность измерительной информации.
Заявленное изобретение решает задачу расширения диапазона моделируемых процессов, частот внешних сил, воспроизводимых динамометром, повышения жесткости устройства и точности измерений в динамическом режиме разрушения ледового поля, особенно при испытаниях крупногабаритных моделей плохообтекаемых морских инженерных сооружений (в том числе ледостойких буровых платформ).
Для этого устройство дополнительно снабжено двумя штангами, двумя динамометрами, силопередающей плитой с цилиндрической втулкой, опорной платформой с буртиком и шкальным механизмом, причем буксируемая модель через силопередающую плиту, жестко закрепленную на модели, и опорную платформу связана с динамометрами, которые образуют трехопорную соизмерительную систему и через штанги, выполненные с переменной по высоте поперечной жесткостью, и раму связаны с буксировочной тележкой, при этом один из динамометров установлен так, что его продольная ось совпадает с продольной осью трехопорной силоизмерительной системы и с направлением буксировки модели, а два других динамометра расположены по поперечной оси системы симметрично относительно ее продольной оси, цилиндрическая втулка силопередающей плиты размещена коаксиально с цилиндрическим отверстием в буртике опорной платформы с возможностью поворота силоперадающей плиты вместе с моделью относительно вертикальной оси и фиксации модели в заданном угловом положении, на буртике опорной платформы нанесена сетка шкального механизма, а на цилиндрической втулке силопередающей плиты нанесен индекс, причем каждый из динамометров содержит датчики продольной, поперечной и вертикальной сил и выполнен в виде последовательно соединенных между собой двух упругих элементов, один из которых представляет собой пятистержневой упругий элемент с центральным стержнем, оснащенным тензорезисторами, и с четырьмя периферийными стержнями, расположенными между двумя фланцами и выполненными заодно целое с ними, а второй упругий элемент представляет собой обод со спицами и ступицей, при этом спицы оснащены тензорезисторами и выполнены заодно целое с ободом и ступицей, причем подвижный фланец первого упругого элемента жестко соединен со ступицей второго упругого элемента, а его обод соединен с опорной платформой, центральный стержень первого упругого элемента имеет в поперечном сечении форму преимущественно квадрата, а периферийные стержни - форму преимущественно прямоугольников, оси стержней совпадают с направлением продольной и поперечной осей канала опытового бассейна, при этом периферийные стержни, симметрично расположенные относительно центрального стержня, попарно ориентированы наименьшей поперечной жесткостью в направлении оси канала опытового бассейна, по которой они расположены, выход датчиков каждого динамометра соединены с входом электронной вычислительной машины.
Крепление буксируемой модели непосредственно на динамометрах, подвешенных в свою очередь на жестких штангах, поперечная жесткость которых увеличивается в направлении к месту ее заделки на раме буксировочной тележки, обеспечивает максимально возможную в принятых габаритах конструкции жесткость системы. Этим обеспечивается широкий диапазон частот исследования и повышается точность измерений в динамическом режиме разрушения ледового покрова.
Трехопорное устройство с тремя динамометрами позволяет проводить буксировочные испытания крупногабаритных плохообтекаемых моделей морских инженерных сооружений под различными углами буксировки в широком диапазоне моделирования физико-механических и геометрических характеристик ледового поля. Несмотря на то, что динамометры измеряют непосредственно только три составляющие сил (продольную, поперечную, вертикальную), устройство в целом обеспечивает измерение трех составляющих сил и трех моментов в ортогональных плоскостях, действующих на буксируемую модель. Важным обстоятельством является то, что действующие на буксируемую модель под различными углами буксировки значительные по величине изгибающие и скручивающие моменты преобразуются трехопорной системой в соответствующие составляющие сил в точках крепления модели.
Благодаря этому динамометры освобождены от действия изгибающих и скручивающего моментов, что повышает точность измерения ими сил. Трехопорная силоизмерительная система в сравнении с одноопорной в значительной мере повышает жесткость системы модель - динамометр - штанга - буксировочная тележка. В виду того, что изгибающие и скручивающий модель моменты преобразуются системой в силы, воспринимаемые динамометрами в трех опорах, практически отсутствуют перемещения модели от этих моментов. Благодаря этому устраняются низкочастотные колебания модели, характерные для одноопорной системы и обусловленные недостаточной жесткостью системы в звене модель - динамометр, повышается достоверность моделирования процесса ломки ледового поля и результатов измерений.
Предлагаемое устройство является универсальным: испытания малогабаритных и хорошо обтекаемых моделей ( судно, цилиндр, усеченный конус) можно проводить на одной опоре с одним динамометром, испытания моделей, у которых продольный размер значительно превышает поперечный, можно проводить на двух опорах с двумя динамометрами (при этом обе опоры устанавливаются вдоль оси буксировки модели).
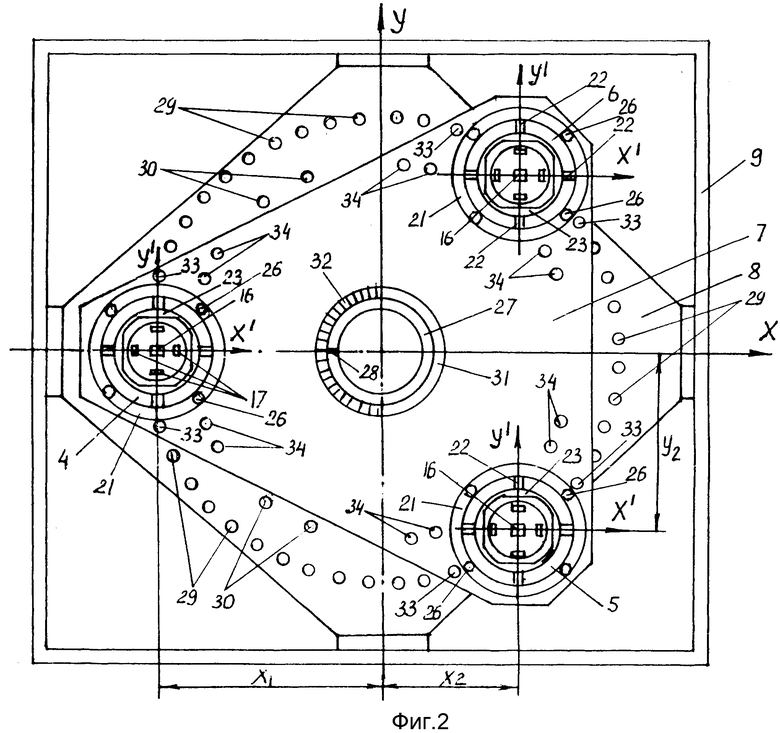
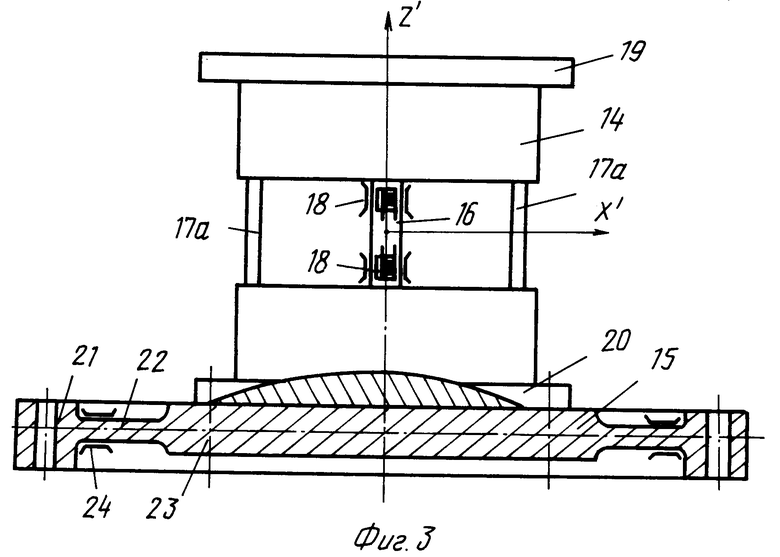
На фиг.1 показана схема устройства, вид сбоку: на фиг.2- сечение устройства по линии А-А; на фиг.3, 4 - конструкция динамометра; на фиг.5 - схема соединений измерительных датчиков с ЭВМ.
Устройство (фиг.1) содержит жестко закрепленную на буксировочной тележке 1 раму 2 со штангами 3, которые связаны через динамометр 4, 5, 6 и опорную платформу 7 с силопередающей плитой 8, закрепленной на модели инженерного сооружения 9, буксируемой в канале опытового бассейна 10, заполненного водой 11. На поверхности воды в канале опытового бассейна наморожено ледовое поле 12. Штанги 3 выполнены с переменной по высоте поперечной жесткостью, которая обеспечивается за счет ребер жесткости 13, выполненных в виде прямоугольной трапеции.
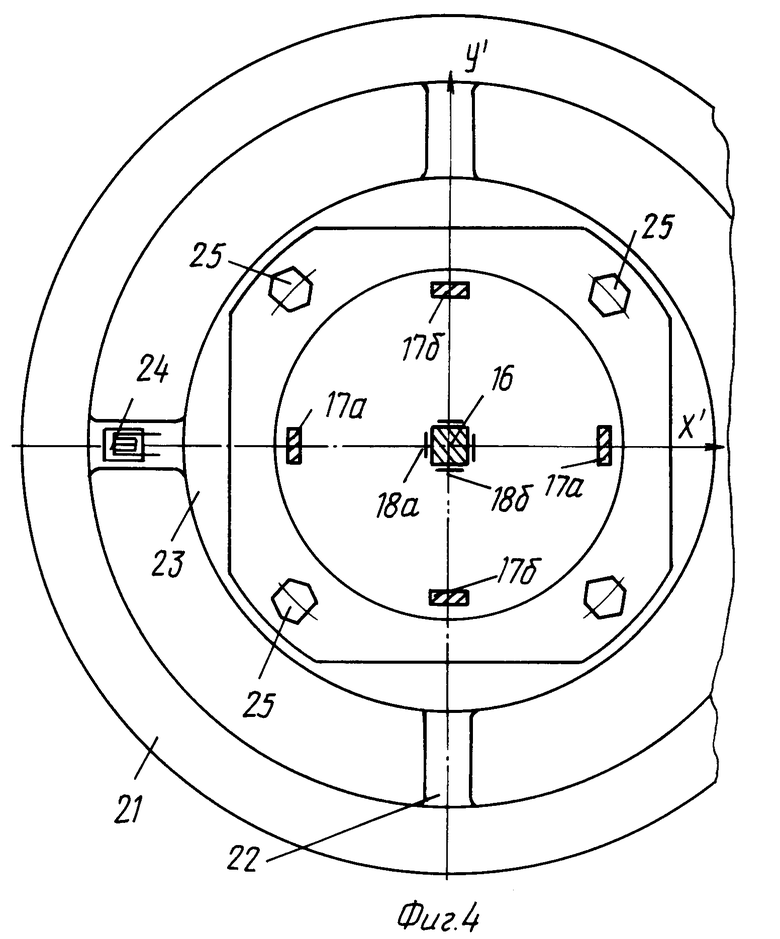
Динамометры выполнены в виде последовательно соединенных упругих элементов 14 и 15 (см. фиг. 3,4). Упругие элементы 14 представляют собой пятистержневые пружины, содержащие центральный стержень 16, четыре периферийных стержня 17 и тензорезисторные преобразователи 18, заключенные между двумя фланцами 19 и 20 и выполненные заодно целое с ними. Упругие элементы 15 представляют собой обод 21 со спицами 22 и ступицей 23. Спицы 22 оснащены тензорезисторами 24 и выполнены заодно целое с ободом 21 и ступицей 23. Подвижные фланцы 20 пятистержневых упругих элементов 14 жестко соединены со ступицей 23 упругих элементов 15 с помощью болтов 25, а ободы 21 также жестко соединены с опорной платформой 7 болтами 26 (см. фиг. 2).
Силопередающая плита 8, неподвижно соединенная с буксируемой модель 9, снабжена цилиндрической втулкой 27, на которой нанесен индекс 28, и двумя рядами отверстий 29 и 30, которые расположены на окружностях, имеющих общий центр с цилиндрической втулкой 27. Опорная платформа 7 снабжена буртиком 31 с цилиндрическим отверстием. На буртике опорной платформы нанесена сетка шкального механизма 32. Цилиндрическая втулка 27 силопередающей плиты 8 размещена коаксиально с цилиндрическим отверстием в буртике 31 опорной платформы 7, обеспечивая возможность поворота силопередающей плиты вместе с моделью относительно вертикальной оси. Опорная платформа 7 снабжена также двумя рядами отверстий 33 и 34, которые расположены на окружностях, имеющих общий центр с буртиком 31. Причем диаметры окружностей, на которых расположены отверстия в силопередающей плите и опорной платформе, и шаг между отверстиями одинаковы.
Отверстия 29, 33 и 34 выполнены с одинаковым шагом Δ (7,5o), который равен минимальному углу поворота модели при испытаниях. Отверстия 30 выполнены с шагом 2Δ. Таким образом на опорной платформе 7 вблизи крепления каждой опоры расположены по шесть отверстий, (33, 34) по 4-м из них возле каждой опоры (всего в 12 точках) силопередающая плита 8 жестко соединяется с опорной платформой 7 с помощью болтов (на фиг. не показаны) в фиксированном угловом положении модели, отсчет которого осуществляется по шкальному механизму.
Динамометры (см. фиг. 2) ориентированы таким образом, что оси стержней X', Y' пятистержневого упругого элемента совпадают с направлениями продольной X и поперечной Y осей канала опытового бассейна. При этом периферийные стержни 17а (см. фиг. 3, 4), расположенные по оси X', установлены симметрично относительно центрального стержня 16 и ориентированы наименьшей поперечной жесткостью в направлении этой же оси X'. Периферийные стержни 17б, расположенные на оси Y', также установлены симметрично относительно центрального стержня 16 и ориентированы наименьшей поперечной жесткостью в направлении оси Y'. Центральный стержень 16 имеет в поперечном сечении форму преимущественно квадрата (в случае, если одна из измеряемых сил Px или Py, значительно превышает другую, сечение центрального стержня может иметь форму прямоугольника), а периферийные стержни 17 имеют форму в поперечном сечении преимущественно прямоугольников (такая форма поперечного сечения периферийных стержней обеспечивает наибольший момент сопротивления относительно момента, скручивающего испытуемую модель, что необходимо для обеспечения целостности динамометра в случае проведения испытаний модели по одноопорной или двухопорной схеме буксировки).
Динамометры образуют трехопорную силоизмерительную систему (см. фиг. 2) и установлены таким образом, что продольная ось X' динамометра 4 совпадает с продольной осью X трехопорной силоизмерительной системы и с направлением буксировки модели (ось X также совпадает с направлением продольной оси канала опытового бассейна). Два других динамометра 5 и 6 установлены симметрично оси Х.
Тензорезисторы 18 и 24 (см. фиг. 3, 4) соединены в мостовые измерительные схемы. Причем тензорезисторы 18а, закрепленные на боковых поверхностях центрального стрежня 16, расположенных перпендикулярно оси X', соединены в мостовую схему, которая образует датчик продольной силы  , а тензорезисторы 18б, закрепленные на боковых поверхностях центрального стержня 16, расположенных перпендикулярно оси Y', соединены в мостовую схему, которая образует датчик поперечной силы
, а тензорезисторы 18б, закрепленные на боковых поверхностях центрального стержня 16, расположенных перпендикулярно оси Y', соединены в мостовую схему, которая образует датчик поперечной силы  . Тензорезисторы 24, закрепленные на спицах 22 упругого элемента 15, также соединены в мостовую схему и образуют датчик вертикальной силы
. Тензорезисторы 24, закрепленные на спицах 22 упругого элемента 15, также соединены в мостовую схему и образуют датчик вертикальной силы  . Таким образом, динамометр в каждой опоре содержит по три силоизмерительных датчика
. Таким образом, динамометр в каждой опоре содержит по три силоизмерительных датчика 
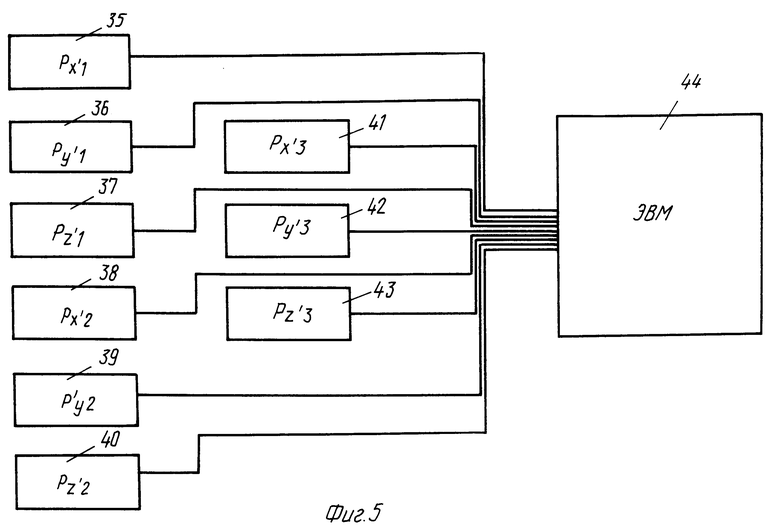
Электрические выходы датчиков 35, 36, 37 динамометра 4, датчиков 38, 39, 40 динамометра 5 и датчиков 41, 42, 43 динамометра 6 соединены с входом электронной вычислительной машины 44 (см. фиг. 5).
Устройство работает следующим образом. При движении буксировочной тележки 1 в канале опытового бассейна 10 на модели 9 морского инженерного сооружения, буксируемой в режиме "жесткой запряжки", возникают гидродинамические со стороны воды и ледовые силы и моменты от разрушения ледового поля 12. Эти силы и моменты передаются на динамометры 4, 5, 6, деформируя измерительные стержни 16, 17 и спицы 22. Деформации стержней и спиц преобразуются тензорезисторами 18 и 24 в электрические сигналы, пропорциональные действующим силам и моментам. Электрические сигналы от измерительных датчиков 35 - 43 динамометров поступают на ЭВМ 44, которая вычисляет действующие на буксируемую модель силы и моменты по следующим алгоритмам:
где Px, Py, Pz, Mx, My, Mz - силы и моменты, действующие на модель относительно осей X, Y, Z:
- измеряемые составляющие силы в направлении осей X', Y', Z' динамометрами 4, 5, 6, причем силам, измеряемым динамометрам 4, присвоен индекс 1, а силам, измеряемым динамометром 5, присвоен индекс 2, соответственно, силам, измеряемым динамометром 6, присвоен индекс 3;
Xi, Yi, Zi - координаты измерительной оси датчика i - того динамометра относительно системы координат X,Y,Z опытового бассейна.
Благодаря тому, что один из динамометров 3-х опорной силоизмерительной системы установлен так, что его продольная ось совпадает с продольной осью системы, а два других динамометра расположены по поперечной оси симметрично относительно продольной оси системы, существенно упрощается система коэффициентов в уравнениях моментов, а с ней - и сами уравнения моментов. При этом матрица коэффициентов Xi, Yi, Zi приобретает вид: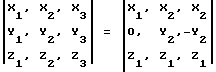
Координаты Xi, Yi, Zi показаны на фиг. 2, а координаты Z1 показана на фиг. 1.
Система уравнений моментов после замены коэффициентов Xi, Yi, Zi на соответствующие им значения X1, X2, Y2,Z1 для предложенной конструкции устройства, а также с учетом уравнений сил, приобретает вид: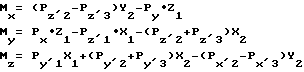
Главным преимуществом упрощения системы уравнений моментов является повышение точности определения моментов, которая достигается благодаря уменьшению слагаемых в уравнениях.
Испытания модели 9 в ледовом опытном бассейне и измерение сил и моментов, действующих на модель, проводится на нескольких режимах движения буксировочной тележки 1 по скорости. Обычно длины рабочего участка хватает для проведения испытаний на 3 - 4 скоростях движения. После этого буксировочная тележка 1 с моделью 9 возвращается в исходное положение; начинается процесс намораживания нового ледового поля и подготовки устройства к очередной серии испытаний, например, с углом дрейфа модели ϕ. Для этого снимают болты крепления опорной платформы 7 к силопередающей плите 8. Разворачивают модель 9 относительно 3-х опорной установки на заданный угол ϕ, который отсчитывают по шкальному механизму 28, 32, и закрепляют силопередающую плиту с опорной платформой болтами по отверстиям 33, 34. Устройство готово к новой серии испытаний.
Таким образом, предлагаемая конструкция устройства для буксировочных испытаний в ледовом бассейне обеспечивает высокую жесткость системы модель - буксировочное устройство - буксировочная тележка благодаря креплению модели к буксировочной тележке через три динамометра, разнесенных в плоскости X, Y модели, устраняет низкочастотные колебания модели, характерные для одноопорной схемы крепления, в особенности для крупногабаритных плохообтекаемых моделей, подверженных воздействию значительных по величине ледовых сил и моментов, обеспечивает в целом проведение испытаний моделей судов и морских инженерных сооружений в широком диапазоне моделирования физико-механических и геометрических характеристик ледового поля и надежное разделение компонент гидродинамических и ледовых нагрузок в системе координат канал бассейна и их измерение в динамическом режиме разрушения ледового поля и консолидированных торосистых перемычек.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ БУКСИРОВОЧНЫХ ИСПЫТАНИЙ МОДЕЛИ МОРСКОГО ИНЖЕНЕРНОГО СООРУЖЕНИЯ В ОПЫТОВОМ БАССЕЙНЕ | 2005 |
|
RU2308397C2 |
| ОПЫТОВЫЙ БАССЕЙН ДЛЯ ИСПЫТАНИЙ МОДЕЛЕЙ МОРСКИХ ИНЖЕНЕРНЫХ СООРУЖЕНИЙ | 1996 |
|
RU2112689C1 |
| СПОСОБ МАНЕВРЕННЫХ ИСПЫТАНИЙ МОДЕЛИ СУДНА В ОПЫТОВОМ БАССЕЙНЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2132796C1 |
| ДИНАМОМЕТР ДЛЯ ИЗМЕРЕНИЯ УСИЛИЙ НА МОДЕЛИ ГРЕБНОГО ВИНТА РЕГУЛИРУЕМОГО ШАГА | 1995 |
|
RU2104505C1 |
| УСТРОЙСТВО ДЛЯ БУКСИРОВОЧНЫХ ИСПЫТАНИЙ МОДЕЛИ БУРОВОЙ ПЛАТФОРМЫ В ОПЫТОВОМ БАССЕЙНЕ | 1999 |
|
RU2168438C2 |
| УСТРОЙСТВО ДЛЯ БУКСИРОВОЧНЫХ ИСПЫТАНИЙ МОДЕЛИ СУДНА В ОПЫТОВОМ БАССЕЙНЕ | 1994 |
|
RU2072681C1 |
| БУКСИРОВОЧНАЯ ТЕЛЕЖКА ДЛЯ ОПЫТОВОГО БАССЕЙНА | 1996 |
|
RU2110052C1 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЙ МОДЕЛЕЙ СУДОВЫХ ДВИЖИТЕЛЕЙ | 2001 |
|
RU2216476C2 |
| СПОСОБ ИСПЫТАНИЙ МОДЕЛИ МОРСКОГО ИНЖЕНЕРНОГО СООРУЖЕНИЯ В ЛЕДОВОМ ОПЫТОВОМ БАССЕЙНЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2279654C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СИЛ СЖАТИЯ ЛЬДА | 2000 |
|
RU2187084C2 |
Изобретение относится к экспериментальной гидромеханике и касается проектирования оборудования для проведения гидродинамических и ледовых исследований моделей судов в ледовом опытовом бассейне. Сущность изобретения состоит в том, что устройство для буксировочных испытаний модели судна снабжено дополнительными двумя штангами, двумя динамометрами, а также силопередающей плитой с цилиндрической втулкой, опорной платформой с бортиком и шкальным механизмом. Основной и дополнительные динамометры образуют трехопорную силоизмерительную систему. Динамометры через штанги и раму связаны с буксировочной тележкой. Цилиндрическая втулка размещена коаксиально с цилиндрическим отверстием в буртике опорной платформы. На буртике нанесена сетка шкального механизма, а на цилиндрической втулке - индекс. Каждый из динамометров содержит датчики продольной, поперечной и вертикальных сил и выполнен из двух упругих элементов, последовательно соединенных между собой. Первый упругий элемент представляет собой пятистержневой упругий элемент с центральным стержнем, преимущественно квадратным в поперечном сечении, и прямоугольными в сечении остальными стержнями. Второй упругий элемент выполнен из обода со спицами и ступицей. Центральный стержень и спицы выполнены с тензорезисторами. Спицы выполнены за одно целое с ободом и ступицей. Подвижный фланец первого упругого элемента жестко соединен со ступицей, а обод соединен с опорной платформой. Выходы датчиков каждого динамометра соединены со входом электронной вычислительной машины. Технический результат реализации изобретения состоит в расширении диапазона моделируемых процессов. 5 ил.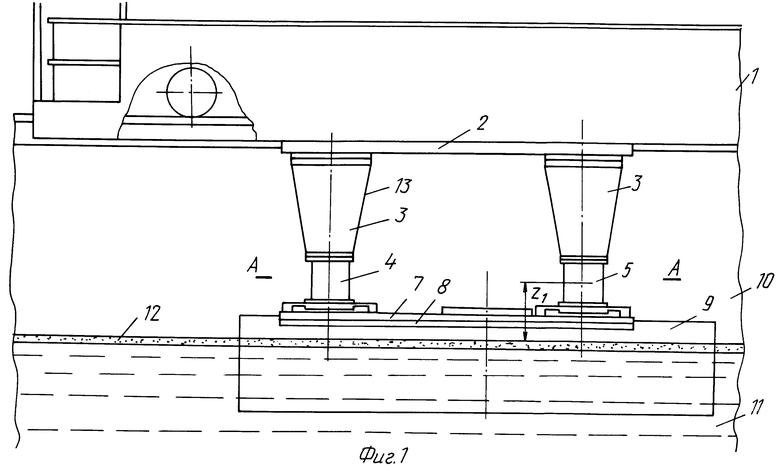
Устройство для буксировочных испытаний модели судна в опытовом бассейне, содержащее буксировочную тележку с жестко закрепленной рамой со штангой, связанной с динамометром и буксируемой в канале бассейна моделью, отличающееся тем, что устройство дополнительно снабжено двумя штангами, двумя динамометрами, силопередающей плитой с цилиндрической втулкой, опорной платформой с буртиком и шкальным механизмом, причем буксируемая модель через силопередающую плиту, жестко закрепленную на модели, и опорную платформу связана с динамометрами, которые образуют трехопорную силоизмерительную систему, и через штанги, выполненные с переменной по высоте поперечной жесткостью, и раму связаны с буксировочной тележкой, при этом один из динамометров трехпорной силоизмерительной системы установлен так, что его продольная ось совпадает с продольной осью трехопорной силоизмерительной системы и с направлением буксировки модели, а два других динамометра расположены по поперечной оси системы симметрично относительно ее продольной оси, цилиндрическая втулка силопередающей плиты размещена коаксиально с цилиндрическим отверстием в буртике опорной платформы с возможностью поворота силопередающей плиты вместе с моделью относительно вертикальной оси и фиксации модели в заданном угловом положении, на буртике опорной платформы нанесена сетка шкального механизма, а на цилиндрической втулке силопередающей плиты нанесен индекс, причем каждый из динамометров содержит датчики продольной, поперечной и вертикальной сил и выполнен в виде последовательно соединенных между собой двух упругих элементов, один из которых представляет собой пятистержневой упругий элемент с центральным стержнем, оснащенным тензорезисторами, и с четырьмя периферийными стержнями, расположенными между двумя фланцами и выполненными за одно целое с ними, а второй упругий элемент представляет собой обод со спицами и ступицей, при этом спицы оснащены тензорезисторами и выполнены за одно целое с ободом и ступицей, причем подвижный фланец первого упругого элемента жестко соединен со ступицей второго упругого элемента, а его обод соединен с опорной платформой, центральный стержень первого упругого элемента имеет в поперечном сечении форму преимущественно квадрата, а периферийные стержни - форму преимущественно прямоугольников, оси стержней совпадают с направлением продольной и поперечной осей канала опытового бассейна, при этом периферийные стержни, симметрично расположенные относительно центрального стержня, попарно ориентированы наименьшей поперечной жесткостью в направлении оси канала опытового бассейна, по которой они расположены, выходы датчиков каждого динамометра соединены со входом электронной вычислительной машины.
| SU, авторское свидетельство, 1057362, кл | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
