Изобретение относится к медицинскому приборостроению и может быть использовано в ортопедии, травматологии, протезировании, медицинской экспертизе для диагностики и коррекции опорно-двигательной функции человека, обучения правильной ходьбе, а также в космонавтике, авиации, спорте и других областях для определения способностей человека и оценки состояния его в процессе тренировки, т.е. дозирования нагрузок на его опорно-двигательный аппарат.
Для диагностики опорно-двигательной функции человека используют различные устройства и системы.
Известно устройство для определения кинематических параметров движения человека (авт. свид. N 961671, А 61 В 5/10, 1982, а также патент США N 5388591, А 61 В 5/103), которое по одновременной регистрации положения стоп по контактным датчикам под ними и траектории движения общего центра масс человека (движение характерной точки на спине, визуально наблюдаемое с помощью кинокамеры), определяет кинематику движения человека, например инвалида, что может быть использовано при протезировании.
Однако данное устройство недостаточно информативно и не позволяет коррелировать полученные данные с конструкцией и возможными дефектами обуви инвалида.
Известны также устройства, позволяющие оценивать параметры временной функции угла тазобедренного, коленного и голеностопного суставов, например, основанные на измерении функции углов перечисленных суставов во времени с помощью угловых патенциометрических датчиков, установленных на этих суставах (патент США N 537385, А 61 В 5/100).
Однако параметры временной функции угла суставов не информативны для определения нарушений опорно-двигательной функции человека, наблюдающихся при многих патологиях нижних конечностей, в частности при деформации, нейропатии или ампутации, а кроме того, эти параметры незначительно коррелируют как с особенностями конструкции обуви, ортеза или протеза, так и с возможными дефектами этих изделий, влияющих на состояние опорно-двигательной функции. Все это снижает использование подобных систем для диагностики и коррекции опорно-двигательной функции человека.
Для этих же целей используются тензометрические платформы, выполненные в виде двух плит, соединенных установленными между ними по углам четырьмя кольцами, на которых закреплены тензодатчики.
Тензодатчики соединены с регистрирующей аппаратурой (осциллографом, самописцем, ЭВМ). При наступании пациента на такие пластины во время ходьбы сопротивление тензодатчиков и соответственно ток, проходящий через них, изменяется пропорционально нагрузке, воспринимаемой платформой, которая в свою очередь зависит от структуры локомоторного акта, например, стереотипа походки. Тензодатчики соединены таким образом, что регистрирующий прибор формирует временную функцию вертикальной, продольной и поперечной составляющих реакции опоры при ходьбе или других локомоторных актах - прыжках, беге и т.п. (описание "Аппаратно-программный комплекс", "МБН-Биомеханика", научно-медицинская фирма МБН, Москва, 1995).
Однако параметры временной функции вертикальной, продольной и поперечной составляющих реакции опоры также недостаточно информативны для определения нарушений опорно-двигательной функции человека, наблюдающихся при деформации, нейропатии или ампутации, и как в первом примере, незначительно коррелируют как с особенностями конструкции обуви, ортеза или протеза, так и с возможными дефектами этих изделий, влияющих на состояние опорно-двигательной функции. Все это также снижает использование подобных систем для диагностики и коррекции опорно-двигательной функции человека.
Известны также системы, выполненные в виде матричных измерительных элементов с датчиками давления, соединенных с ПЭВМ через модули преобразования и обработки первичного сигнала. Такие системы выполняются с измерительными элементами как в виде пластин, устанавливаемых на пол, так и в виде стелек, вкладываемых в обувь обследуемого. Эти системы позволяют оценить распределение давления под стопами пациента при выполнении им локомоторных актов, например, при ходьбе. В случае использования измерительных элементов в виде пластин регистрируются распределение давления под подошвой обуви, а в виде стелек под подошвой стопы (описание системы "ОPMES" фирмы T&T medilogic, Berlin, 1995).
Параметры ходьбы, а именно параметры взаимодействия стоп с опорой, которые позволяют анализировать подобные системы (распределение давления под стопами, траектории центра давления под стопами и графики интегральной нагрузки на стопы), являются информативными для определения нарушений опорно-двигательной функции человека при большинстве патологий нижних конечностей, в том числе при их деформации, нейропатии или ампутации. Кроме того, перечисленные параметры значительно коррелируют как с особенностями конструкции обуви, ортеза или протеза, так и с возможными дефектами этих изделий, влияющими на состояние опорно-двигательной функции. Поэтому такие системы нашли применение в практике диагностики опорно-двигательной функции человека и коррекции ее обучением пациента или использования протезно-ортопедических и обувных изделий.
Однако упомянутая система не исключает методических ошибок, связанных с анализом некорректных ("случайных") шагов пациента, с учетом разницы первоначального поджатия измерительных стелек под здоровой и пораженной конечностью, с учетом индивидуальных особенностей данного пациента и особенностей его протезно-ортопедического изделия.
Наиболее близким прототипом к заявленному изобретению является разработанная в США система с измерительными стельками фирмы "Фаст-Скан" ("Fast-Scan"), которая устроена следующим образом.
Матричные измерительные элементы системы (МИС), выполненные в виде стелек с тензодатчиками (для измерения давления), соединены с ЭВМ посредством следующих модулей:
- модуля преобразования сигналов (МПС), в котором сигналы с датчиков нормируются по амплитуде и фильтруются от помех;
- модуля первичной обработки сигналов (МПОС), в котором эти сигналы преобразуются в аналоговую последовательность отсчетов с датчиков;
- модуля сопряжения (МС) с системной шиной ЭВМ, в котором сигналы превращаются в последовательность цифровых двоичных относительных значений, характеризующих давление в датчиках на момент считывания информации с них.
Эта информация поступает в ЭВМ, образуя массив данных с датчиков, который нормируется в блоке нормирования сигнала (БНС) и после этого соответствует истинному распределению давления под стопами пациента.
В ЭВМ эти сигналы посредством блока преобразования и отображения информации (БПОИ) преобразуются в графическую и табличную форму и образуют выходную информацию системы, отображающую, в частности, распределение давления под стопами пациента, траектории центра давления под стопами и графики временной функции интегральной нагрузки на каждую из стоп.
Посредством взаимодействия с блоком управления вводом информации (БУВИ) оператор вводит в произвольной форме анкетную информацию о пациенте и управляет режимами работы системы (система "FSCAN" фирмы TEKSCAN, Jnc., USA, Boston, 1996, 02, 5 p.).
Одним из недостатков такой системы является низкая точность диагностики опорно-двигательной функции человека и низкая эффективность работы при коррекции этой функции посредством использования ортезов, протезов или специального обучения. Эти недостатки системы обусловлены тем, что в системе не предусмотрена возможность исключения из анализа "некорректных" шагов, например, шагов, на которых пациент случайно пошатнулся или изменил направление движения.
Вторым недостатком системы является низкая достоверность диагностики опорно-двигательной функции. Это является следствием того, что система не позволяет учесть различие в условиях проведения исследования для правой и левой конечности, от которых зависят результаты диагностики. Например, если при исследовании ходьбы пациентов, у которых одна конечность является протезированной, не учесть разницу первоначального поджатия измерительной стельки под правой и левой конечностями ввиду различной степени "разношенности" обуви под сохранившейся и искусственной стопой, сравнение полученных результатов являются некорректными.
Кроме того, недостатком системы является низкая эргономичность, так как: во-первых, система не обладает режимом поддержки ("подсказки" оператору) трактовки результатов исследования ввиду того, что не предусматривает возможность содержания в программном блоке информации о зависимости характеристик взаимодействия стоп с опорой ни от вида нарушения нарушения опорно-двигательной функции человека, ни от особенностей конструкции или дефекта протезно-ортопедического изделия, используемого для коррекции этой функции, поэтому чтобы правильно трактовать полученные результаты, оператор вынужден либо иметь большой опыт работы с данным контингентом пациентов на системе, либо пользоваться литературными источниками, в которых описан аналогичный опыт работы других специалистов.
Во-вторых, в системе отсутствует возможность автоматического ввода информации, анкетной (о пациенте) и идентификационной (о режиме обследования); вся эта информация вводится оператором посредством набора текста с клавиатуры в произвольном неформализованном виде, что может сопровождаться как логическими, так и стилистическими или орфографическими ошибками, влияющими на удобство и корректность дальнейшего анализа результатов обследования, особенно при передаче другим специалистам.
Технический результат изобретения состоит в повышении точности и достоверности диагностики опорно-двигательной функции человека и эффективности коррекции этой функции, а также повышении эргономичности системы.
Поставленная задача достигается тем, что в систему диагностики опорно-двигательной функции человека, содержащую устройство отображения, датчики измерения давления под правой и левой стопой, последовательно соединенные через блоки фильтров с блоками формирования истинных значений давления под правой и левой стопами соответственно, блок определения коэффициента симметрии ходьбы, выход которого подключен на вход устройства определения диагностических критериев ходьбы, введены два блока вычитания, два блока запоминания степени начального поджатия датчика без нагрузки правой и левой стоп, блок выделения некорректных шагов, блок запоминания анкетных и идентификационных данных пациента, блок выбора рациональных значений диагностических критериев, блок формирования перечня патологий опорно-двигательной функции пациента, при этом выходы блоков формирования истинных значений давления и выходы блоков запоминания степени начального поджатия датчика без нагрузки под левой и правой стопами соответственно подключены к блокам вычитания, выходы которых соединены со входами блока определения коэффициента симметрии ходьбы, выход которого подключен к первому входу блока формирования перечня патологий опорно-двигательной функции пациента, ко второму входу которого подключен выход блока выбора рациональных значений у диагностических критериев, а к третьему входу - выход устройства определения диагностических критериев ходьбы, входы которого соединены соответственно с выходами блоков формирования истинных значений давления под правой и левой стопами и блока выделения некорректных шагов, входы которого связаны с выходами датчиков измерения давления под правой и левой стопами, кроме того, вход блока выбора рациональных значений диагностических критериев соединен с выходом блока анкетных и идентификационных данных пациента, а выход блока формирования перечня патологий опорно-двигательной функции пациента подключен к устройству отображения.
На чертеже отображена предлагаемая система, где 1 - датчик измерения давления под правой стопой (ДИПС), 2 - датчик измерения давления под левой стопой (ДИЛС), 3, 4 - блоки фильтров, 5, 6 - блоки формирования истинных значений давления (БФИЗД), 7, 8 - блоки вычитания, 9 - блок запоминания степени начального поджатия датчика без нагрузки правой стопы, 10 блок запоминания степени начального поджатия датчика без нагрузки левой стопы, 11 - блок определения коэффициента симметрии ходьбы (БОКСХ), 12 - блок выделения некорректных шагов (БВНШ), 13 - устройство определения диагностических критериев ходьбы (УОДКХ), 14 - блок запоминания анкетных и идентификационных данных пациента (БЗАИДП), 15 - блок выбора рациональных значений диагностических критериев (БВРЗДК), 16 - блок формирования перечня патологий опорно-двигательной функции пациента (БФПП), 17 - устройство отображения.
В предлагаемой системе выход датчика измерения давления под правой стопой (ДИПС) 1 и выход датчика измерения давления под левой стопой (ДИЛС) 2 соединены последовательно через блоки фильтров 3 и 4 со входами блоков формирования истинных значений давления (БФИЗД) 5 и 6, выходы которых подключены ко входам блоков вычитания 7 и 8, другие входы которых соединены с выходами блоков запоминания степени начального поджатия датчиков без нагрузки правой и левой стоп 8 и 9. Выходы блоков вычитания 7 и 8 соединены со входами блока определения коэффициента симметрии ходьбы (БОКСХ) 11, выходы которого подключены соответственно ко входу устройства определения диагностических критериев ходьбы (УОДКХ) 13 и ко входу блока формирования перечня патологий опорно-двигательной функции пациента (БФПП) 16 соответственно. Выходы датчиков ДИПС и ДИЛС 1, 2 подключены ко входам блока выделения некорректных шагов 12, выход которого подключен ко входу УОДКХ 13, а его выход - ко второму входу БФПП 16, к третьему входу которого подключен выход блока выбора рациональных значений диагностических критериев (БВРЗДК) 15, на вход которого подключен выход блока запоминания анкетных и идентификационных данных пациента (БЗАИДП) 14, при этом выход блока БФПП 16 связан со входом устройства отображения 17.
Система работает следующим образом.
Перед исследованием в обувь пациента вкладывают матричные измерительные элементы, например, выполненные в виде стелек с тензодатчиками для измерения давления.
Пациенту предлагается выполнить серию локомоторных актов, например пройтись. Количество шагов может быть различным. Рекомендуется 6-15 шагов (левая-правая нога). Датчики 1 и 2 воспринимают давление под стопами пациента, вырабатывая пропорциональный аналоговый сигнал. Далее сигнал поступает в блок фильтров 3 и 4, где из этого сигнала удаляются составляющие помехи, затем сигнал поступает в блоки БФИЗД 5 и 6, где аналоговый сигнал преобразуется путем его нормирования в сигнал, соответствующий истинному значению давления в датчиках 1 и 2 на момент считывания с них информации. Сигнал, соответствующий истинному значению давления, поступает на один из входов блоков вычитания 7 и 8, в котором происходит вычитание из него значений давлений, соответствующих степени начального поджатия датчиков давления (стелек) без нагрузки их весом пациента, формируемых и запомненных в блоках 9 и 10 (для левой и правой ноги в положении сидя, сняв ноги с опоры). Это позволяет учесть различие поджатия стелек от правой и левой стоп, что важно всегда, а особенно, когда одна из ног пациента является, например, протезированной (под протезированной стопой это поджатие обычно более выражено, так как обувь для нее менее разношена, чем для сохранившейся ноги, а искусственная стопа обладает меньшими амортизационными качествами, чем сохранившаяся). Это позволяет исключить влияние на результаты исследования различного поджатия измерительных датчиков (например, стелек) для корректного сопоставления параметров взаимодействия с опорой правой и левой ноги с целью определения с большей точностью коэффициента симметрии ходьбы в блоке БОКСХ 11. Одновременно сигнал с датчиков 1 и 2 поступает в БВНШ 12, где отбраковываются значения давления, соответствующие "случайным" (некорректным шагам) пациента, т. е. шагов при случайном повороте, или если пациент случайно пошатнулся. Как правило, это 1-2 шага, которые резко отличаются от всех остальных и их с целью увеличения достоверности диагностики следует исключить из последующего определения диагностических критериев ходьбы в блоке УОДКХ 13. В упомянутом блоке 13 по сигналам из блоков 5, 6, 11 и 12 определяются диагностические критерии ходьбы, т. е. например по математическим зависимостям вычисляются, например, отношения давления под пяткой к давлению под носком, и таким образом определяется распределение давления вдоль стопы, или, например, определяется траектория центра давления под каждой из стоп и т.д.
Далее в блоке БФПП 16 происходит сравнение полученных экспериментальных диагностических критериев ходьбы с рациональными значениями диагностических критериев и формируется перечень патологий опорно-двигательной функции пациента с учетом коэффициента симметрии ходьбы, поступающего из блока 11. Рациональные значения диагностических критериев формируются в блоке БВРЗДК 15 по сигналу из блока БЗАИДП 14, в котором запоминаются анкетные и идентификационные данные пациента, т.е. в результате проведения статистики исследований определяется среднестатистическая норма (норма в патологии) с учетом идентификационных признаков, что и соответствует рациональным значениям диагностических критериев для конкретного объекта исследований. Так, например, при диагностике пациента с обеими нижними конечностями целесообразно учитывать по крайней мере его пол и возраст.
При оценке опорно-двигательной функции спортсменов необходимо учитывать реализуемую спортивную задачу и использовать соответствующие ей рациональные значения диагностических критериев. Естественно, что такие критерии будут значительно отличаться от нормы, но именно к ним и необходимо будет стремиться при оценке предрасположенности к тому или иному виду спорта. При диагностике и коррекции опорно-двигательной функции пациента после ампутации нижней конечности необходимо также учитывать уровень ампутации конечности и особенности конструкции протеза - функциональность его узлов. В этом случае получаемые результаты надо сравнивать не с нормой, а с так называемой "нормой в патологии". Например, если для сохранившейся стопы хорошему состоянию опорно-двигательной функции пациента распределение давления под стопой со значительной асимметрией в виде большого давления с наружной (латеральной) стороны стопы по сравнению с внутренней (медиальной) стороной соответствует положительному состоянию опорно-двигательной функции, то для протезирования ноги это будет соответствовать чрезмерному варусу стопы, т.е. наклону ее во внутрь. Таким образом в блоке БФПП 16 формируется перечень патологий опорно-двигательной функции (перечень диагнозов) или дефектов обувного или протезно-ортопедического изделия, которым могут вероятностно соответствовать полученные результаты. Оператор использует эту таблицу, переделанную на устройство отображения 17 для постановки окончательного диагноза или принятия решения о необходимости изменения обувного или протезно-ортопедического изделия, используемого для коррекции опорно-двигательной функции. При этом безусловно учитываются результаты клинического осмотра пациента и визуального осмотра изделия.
Таким образом, введение новых блоков в систему, а именно блоков вычитания, блоков запоминания степени начального поджатия датчика без нагрузки правой и левой стоп, блока выделения некорректных шагов, блока запоминания анкетных и идентификационных данных пациента, блока выбора рациональных значений диагностических критериев, блока формирования перечня патологий опорно-двигательной функции пациента с соответствующими новыми связями позволило увеличить точность и достоверность диагностики опорно-двигательной функции человека, а также улучшить эргономические качества системы, высвечивая на мониторе или экране оператора (устройство отображения) картину перечня патологий с учетом особенностей пациента и его состояния.
Опытный образец системы прошел апробацию на Курском протезно-ортопедическом предприятии и в Санкт-Петербургском НИИ протезирования им. Г.А. Альбрехта для настройки протезов нижних конечностей.
В системе использовалось до 252 датчиков на пару стелек. Частота опроса датчиков 100 Гц (сто опросов в секунду), т.е. система может быть использована не только при исследовании ходьбы, но и бега.
В качестве датчиков давления могут быть использованы матричные датчики давления Дж. Вульвет. Датчики в цифровых системах. - М.: Энергоиздат, 1981, с. 62-88).
Блоки фильтрации могут быть выполнены на принципах, изложенных в книге Гольдберга Л.М., Матюшина Б.Д., Поляка М.Н. Цифровая обработка сигналов. М.: Радио и связь, 1985, с. 136-155.
Схемы выполнения блоков формирования истинного значения давления, например, изложены в книге "Радиотехнические системы", М.: Высшая школа, 1979, с. 192-202.
Блоки вычитания могут быть выполнены в виде обычных алгебраических сумматоров.
Блоки запоминания 9, 10, 14 могут быть выполнены в виде запоминающих устройств, например, на магнитных носителях.
Блок выделения некорректных шагов 12 реализует метод прогнозирующей инверсной свертки (Применение цифровой обработки сигналов, под ред. Опенгейма, М. : Мир, 1980, с. 488-492) и может быть выполнен в виде взаимосвязи блоков, один из которых осуществляет деление массива экспериментальных данных с датчиков 1 и 2 на интервалы - шаги как для левой, так и для правой стопы, вычислителя основных характеристик для каждого из шагов, значения которых поступают в другой вычислитель, где для них вычисляется математическое ожидание, среднеквадратическая дисперсия и доверительный интервал, определителя некорректных шагов, где значения основных характеристик каждого шага сравниваются со значением доверительного интервала соответствующей характеристики и в случае, если эти значения не входят в доверительный интервал, то шаг забраковывается, и блока, в котором из первичного массива данных, т.е. интервалов, соответствующих всем шагам эксперимента, отнимаются те периоды, которые соответствуют забракованным шагам. Оставшиеся данные поступают в блок 13, где по ним вычисляются диагностические критерии ходьбы.
Устройство определения диагностических критериев ходьбы 13 может быть выполнено в виде вычислительного блока, определяющего по соответствующим математическим выражениям диагностические критерии, например, критерий распределения давлений вдоль стопы (КСП) по формуле
КСП = Рн/Рп
где Рн - сумма давлений под носком,
Рп - сумма давлений под пяткой.
Блок определения коэффициента симметрии ходьбы может быть выполнен в виде делителя.
Блок формирования перечня патологий может быть выполнен в виде блоков сравнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АКТИВНОЙ КОРРЕКЦИИ СТОПЫ | 2015 |
|
RU2610057C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕСА ЧЕЛОВЕКА И СТЕЛЬКА, ПРЕДНАЗНАЧЕННАЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2531697C1 |
| СПОСОБ МОНИТОРИНГА ДВИГАТЕЛЬНОЙ НАГРУЗКИ ЧЕЛОВЕКА И СТЕЛЬКА, ПРЕДНАЗНАЧЕННАЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2531689C1 |
| СПОСОБ ОЦЕНКИ РЕЗУЛЬТАТОВ РЕАБИЛИТАЦИОННЫХ МЕРОПРИЯТИЙ У БОЛЬНЫХ С ПОСЛЕДСТВИЯМИ ГЕМОРРАГИЧЕСКОГО ИНСУЛЬТА ИЛИ АМПУТАЦИОННЫМИ КУЛЬТЯМИ НИЖНИХ КОНЕЧНОСТЕЙ ПОСЛЕ ПРОТЕЗИРОВАНИЯ | 2013 |
|
RU2547611C1 |
| СПОСОБ КОМПЛЕКСНОЙ ОЦЕНКИ РЕЗУЛЬТАТОВ РЕАБИЛИТАЦИОННЫХ МЕРОПРИЯТИЙ У ПАЦИЕНТОВ С АМПУТАЦИОННЫМИ КУЛЬТЯМИ БЕДРА ПОСЛЕ ПРОТЕЗИРОВАНИЯ | 2014 |
|
RU2558463C1 |
| Способ диагностики состояния стоп человека | 2023 |
|
RU2814368C1 |
| СПОСОБ ОЦЕНКИ СТЕПЕНИ РЕАБИЛИТАЦИИ С ИСПОЛЬЗОВАНИЕМ АКТИВНОГО ЭКЗОСКЕЛЕТА У ПАЦИЕНТОВ С НАРУШЕНИЯМИ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2695605C2 |
| СПОСОБ ОЦЕНКИ ЭФФЕКТИВНОСТИ ОРТОПЕДИЧЕСКОЙ КОРРЕКЦИИ СТОПЫ | 2007 |
|
RU2357705C2 |
| Устройство для контроля нагрузки на стопы | 2023 |
|
RU2816055C1 |
| Способ ранней реабилитации пациентов при остром поражении головного мозга с использованием виртуальной реальности | 2023 |
|
RU2835867C2 |
Изобретение предназначено для диагностики и коррекции опорно-двигательной функции человека, обучения правильной ходьбе, а также для определения способности человека и оценки состояния его в процессе тренировки. Система диагностики содержит устройство отображения, датчики измерения давления под правой и левой стопами, блоки фильтров, блоки формирования истинных значений давления под правой и левой стопами соответственно, блок определения коэффициента симметрии ходьбы, устройство определения диагностических критериев ходьбы. Введение в нее двух блоков вычитания, двух блоков запоминания степени начального поджатия датчика без нагрузки правой и левой стоп, блока выделения некорректных шагов, блока запоминания анкетных данных пациента, блока выбора рациональных значений диагностических критериев, блока формирования перечня патологий опорно-двигательной функции пациента с соответствующими связями между собой и другими элементами системы позволяет повысить точность и достоверность диагностики опорно-двигательной функции человека, а также улучшить эргономические и эксплуатационные ее качества. 1 ил.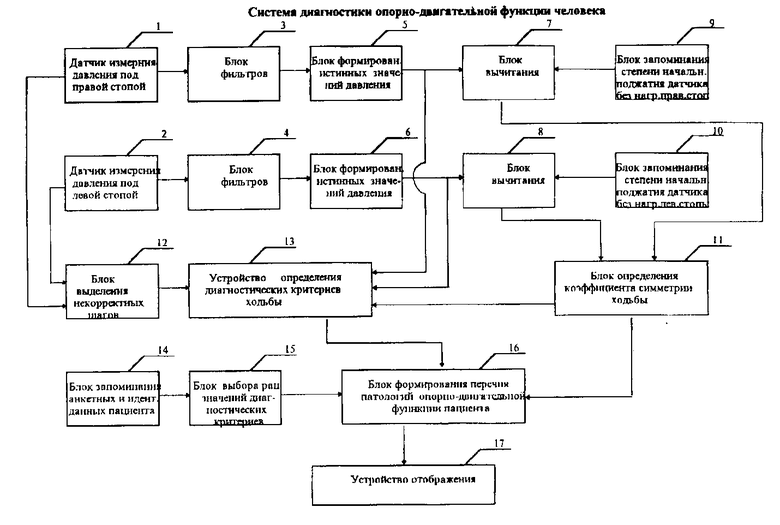
Система диагностики опорно-двигательной функции человека, содержащая устройство отображения, датчики измерения давления под правой и левой стопами, последовательно соединенные через блоки фильтров с блоками формирования истинных значений давления под правой и левой стопами соответственно, блок определения коэффициента симметрии ходьбы, выход которого подключен на вход устройства определения диагностических критериев ходьбы, отличающаяся тем, что в нее введены два блока вычитания, два блока запоминания степени начального поджатия датчика без нагрузки правой и левой стоп, блок выделения некорректных шагов, блок запоминания анкетных и идентификационных данных пациента, блок выбора рациональных значений диагностических критериев, блок формирования перечня патологий опорно-двигательной функции пациента, при этом выходы блоков формирования истинных значений давления и выходы блоков запоминания степени начального поджатия датчика без нагрузки под левой и правой стопами соответственно подключены к блокам вычитания, выходы которых соединены со входами блока определения коэффициента симметрии ходьбы, выход которого подключен к первому входу блока формирования перечня патологий опорно-двигательной функции пациента, ко второму входу которого подключен выход блока выбора рациональных значений диагностических критериев, а к третьему входу - выход устройства определения диагностических критериев ходьбы, входы которого соединены соответственно с выходами блоков формирования истинных значений давления под правой и левой стопами, и блока выделения некорректных шагов, входы которого связаны с выходами датчиков измерения давления под правой и левой стопами, причем вход блока выбора рациональных значений диагностических критериев соединен с выходом блока запоминания анкетных и идентификационных данных пациента, а выход блока формирования перечня патологий опорно-двигательной функции пациента подключен к устройству отображения.
| Описание системы " F-SCAN" фирмы TEKSCAN, Inc., USA, Boston, 1996, 02, 5c . |

