Изобретение относится к области космической техники и может быть применено при создании космических систем, предназначенных для получения видовой информации об обширных районах земной поверхности в условиях жестких ограничений на потребную ширину полосы обзора спутников (вызванных, например, ограниченными возможностями бортовой аппаратуры или необходимостью повышения разрешающей способности наблюдения).
Известен способ наблюдения земной поверхности из космоса, включающий выведение спутников на кратные геосинхронные орбиты с наклонением
i = arccos (n/m).
где
m, n - соответственно числа драконических периодов обращения каждого из спутников и эффективных периодов вращения Земли в одном периоде повторяемости трассы спутника, при этом N спутников выводят на орбиты, характеризующиеся одновременным прохождением экватора Земли всеми спутниками на расстояниях друг от друга, равных
180o/ (mN) при N = 2K;
360o/ (mN) при N = 12K+1,
где
К - натуральное число (авт. свид., SU N 333146; B 64 G 1/10; 27.03.92).
Недостатком данного способа является невозможность его реализации для наклонений, отличных от фиксированного значения (1) равного ≈ 86 градусов.
Известен также способ наблюдения заданного широтного пояса [ϕmin,ϕmax] Земли системой из N ≥ 1 спутников на орбитах произвольного наклонения, минимизирующий потребную для каждого спутника полосу обзора (Баринов К.Н. и др. Динамика и принципы построения орбитальных систем КА//М., Машиностроение, 1975, с. 51-53). В этом способе спутники выводят на орбиты, лежащие в одной плоскости, таким образом, что полосы обзора этих спутников совместно покрывают межвитковый интервал на минимальной по абсолютной величине широте ϕ*, без разрывов в течение одного оборота спутников вокруг Земли. (В частном случае одного спутника ширина его полосы обзора должна быть равна межвитковому расстоянию.) Угловое расстояние между соседними спутниками в плоскости орбиты здесь определяется из условия покрытия параллели на широте ϕ* полосами обзора спутников "стык в стык", то есть из условия, что сдвиг полосы обзора соседних спутников равен долготной ширине Δλш полосы обзора, вычисленной в угловой мере по параллели на широте ϕ*.
Данный способ позволяет обеспечить беспропускной просмотр поверхности Земли за сутки.
Анализ данного способа показал, что несмотря на его очевидные преимущества по сравнению с предыдущим аналогом, обусловленные универсальностью в плане выбора наклонения орбит, он не лишен недостатков. Основным из них является то, что для реализации данного способа при фиксированном числе спутников в системе необходимо обеспечивать большую ширину Δλш полосы обзора их бортовой аппаратуры.
Наиболее близким аналогом изобретения является способ наблюдения земной поверхности из космоса, включающий наблюдение заданного широтного пояса ([ϕmin,ϕmax]) Земли с помощью N ≥ 1 спутников, выводимых на геосинхронные орбиты некоторой кратности m/n и имеющих "совместную" полосу обзора ширины Δλш= 2π/m. Беспропускной обзор широтного пояса при этом осуществляется за время, равное периоду замыкания трасс спутников. Отличительной чертой данного способа является то, что спутники выводят на орбиты, характеризующиеся одновременным прохождением экватора Земли всеми спутниками на расстояниях друг от друга, равных 2π/(mN). Потребная ширина полосы каждого спутника, вычисленная по параллели на минимальной широте ϕ* наблюдения, при этом равна
Δλш= 2π/(mN) (2)
(Robertson R. L. , Low-Cost Earth Observation from Space // AIAA Pap., 79-0126; 1979).
Хотя необходимая для реализации способа-прототипа ширина полосы (2) является меньшей, чем в других аналогах, она может быть еще более уменьшена.
Техническим результатом изобретения служит уменьшение потребной полосы беспропускного обзора заданного широтного пояса наблюдения с помощью N ≥ 1 спутников.
Указанный технический результат достигается тем, что в способе, включающем выведение N ≥ 1 спутников на кратные геосинхронные орбиты и получение на борту этих спутников изображений наземных объектов, расположенных в их полосах обзора, изображения наземных объектов получают в полосе обзора, ширину которой (для одного из спутников) выбирают равной максимальному значению величины
П=max{min[П1(Δ1),П2(Δ2),min[П1(Δ3),П2(Δ4)]} (3)
как функции широты ϕ в заданном широтном диапазоне наблюдений, где П1(Δ); П2(Δ) - зависимости потребной полосы обзора спутника от величины покрываемой ею дуги Δ параллели на широте ϕ, соответственно справа и слева от точки пересечения параллели трассой спутника;
δ1 дуга параллели, равная остатку от деления величины
на ΔL
δ2- дуга параллели, дополняющая указанный остаток до ΔL;
В случае нескольких (N > 1) спутников решение поставленной задачи обеспечивается выведением их на орбиты, характеризующиеся одинаковыми значениями кратности m/n и наклонения i и одновременным прохождением экватора всеми спутниками на угловых расстояниях друг от друга, равных 2κ/N, а также получением изображений наземных объектов в полосах обзора спутников, ширину которых выбирают из условия захвата дуги 2κ/N параллели на широте ϕ*, где ϕ*- широта, при которой достигается максимум указанной величины П, а κ - величина Δ той из дуг Δ1,Δ2,Δ3 или Δ4 - на широте ϕ*, для которой значения соответствующей ей функции П1 или П2 равно указанному максимуму П.
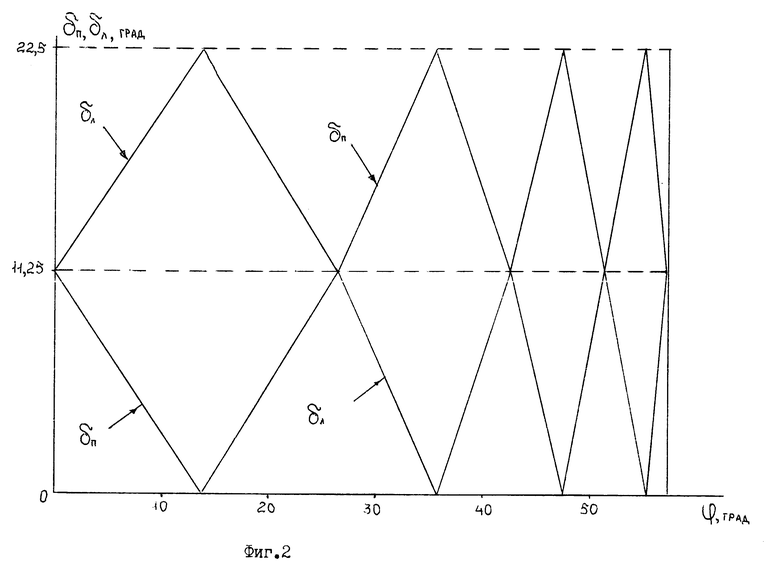
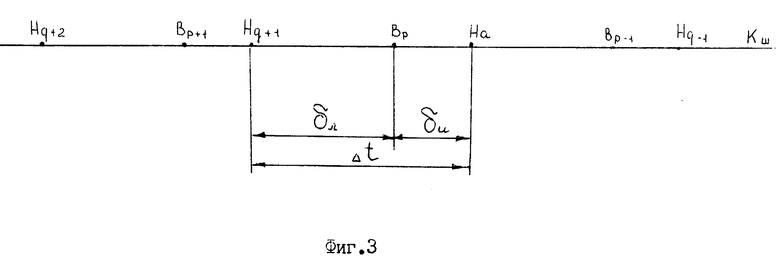
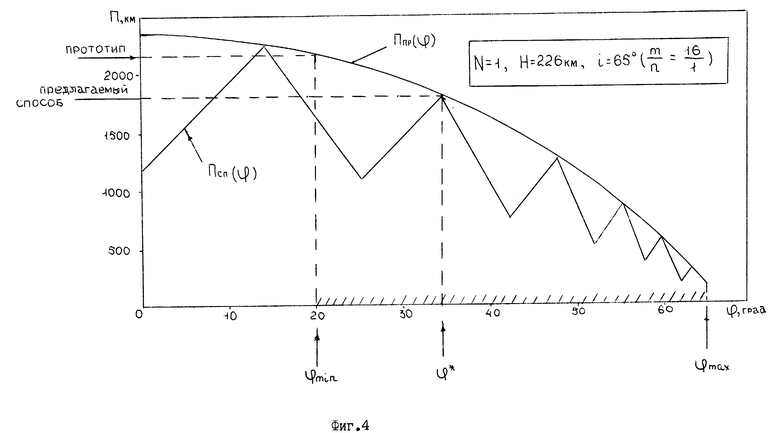
Сущность изобретения поясняется чертежами, где: на фиг. 1 представлено соотношение между восходящими (Bj) и нисходящими (Hj) широтными узлами орбит спутников (j = 1,2,..., m); на фиг. 2 даны зависимости правых (δ1≡δп) и левых (δ2≡δл) минимальных углов смещений, т.е. углов поворота системы точек B = { Bj} до совмещения с системой H {Hj} - от широты ϕ для случая m = 16; n=1; i= 65o (высота орбиты 226 км); на фиг. 3 показана структура широтных интервалов при пересечения спутником параллели Rш в течение каждых n эффективных суток; на фиг. 4 показаны графики изменения ширины П полосы, потребной для беспропускного обзора спутником фиксированной параллели, рассчитанной для способа-прототипа (Ппр) и предлагаемого способа (Псп).
Согласно предлагаемому способу за период повторяемости трассы спутника он пересекает фиксированную параллель Rш в m восходящих и m нисходящих широтных узлах. Каждая из систем узлов B и H является равномерной как для экватора, так и для любой параллели, а расстояние между соседними узлами в этих системах равно ΔL =2π/m. Объединение BUH в общем случае представляет собой неравномерное множество точек, характеризующееся правым и левым угловыми смещениями δ1 и δ2 (фиг. 1), на которые нужно повернуть систему точек B до ее совпадения с системой точек H при вращении B соответственно в направлении возрастания и убывания долгот узлов, причем δ1+ δ2= ΔL.
Для определения данных смещений введем в рассмотрение угол Δψ разворота систем узлов B и H, под которым будем понимать разность долгот широтных узлов Bk и Hk, принадлежащих любому K-му витку спутника. Из фиг. 1 и из известных соотношений сферической тригонометрии можно получить в конечном результате выражение (5) для Δψ.
Правое смещение δ1 представляет собой остаток от деления данного угла разворота системы углов B и H на угловое расстояние ΔL между узлами в этих системах.
Изменение параметров δ1 и δ2/(4) в зависимости от широты рассматриваемой параллели носит колебательный характер, зависящий от конкретных значений элементов орбиты. В качестве иллюстрации на фиг. 2 показан вид зависимостей δ1(ϕ); δ2(ϕ) для m = 16, n = I, i = 65oC (высота орбиты H=226 км).
Пусть Rп - полоса обзора спутника ширины П на поверхности вращающейся Земли. Назовем правосторонним (левосторонним) захватом этой полосы на параллели Rш длину αп(αл) участка параллели, покрытого данной полосой от ее осевой линии (трассы спутника) до правого (левого) края. Будем различать захваты в восходящих и нисходящих широтных узлах, обозначения их соответственно верхними индексами B и H. Можно показать, что в силу симметрии картины покрытия параллели полосой обзора спутника правосторонние захваты α
В соответствии с определением беспропускного покрытия минимальная обеспечивающая его ширина полосы для шарового пояса связана с величиной этой полосы для отдельных параллелей пояса формулой
Пш(R)= max Пш(Rш), Rш∈ R. (7)
То есть для решения вопроса сплошности покрытия широтного пояса достаточно это сделать для одной параллели Rш∈ R.
Анализ покрытия фиксированной параллели будем проводить при фиксированных значениях параметров m,n,i,ϕ. В этом случае можно считать, что правые и левые захваты являются функциями только ширины П полосы обзора.
Широтные узлы, в которых спутник (ИСЗ) пересекает данную параллель в течение каждых n эффективных суток, разбивают Rш на 2m дуг (интервалов), в покрытии которых полосами обзора наблюдаются повторения. В силу строгой периодичности разбиения параллели точками каждой из систем B и H (именно, с шагом ΔL), минимальным повторяющимся фрагментом на параллели Rш является интервал вида (Bj+1, Bj) или (Hj+1, Hj), где j = 1,2,..., m, а индексу m+1 соответствует 1. Для удобства дальнейшего изложения в качестве такого фрагмента параллели примем (Hq+1, Hq), а восходящий узел, расположенный внутри этого интервала, обозначим Bp (фиг. 3). Тогда в общем случае (когда восходящие и нисходящие широтные узлы не совпадают) указанный интервал состоит из двух интервалов, разделенных точкой Bp, беспропускное покрытие которых равносильно беспропускному покрытию всей параллели. Данный факт будет существенно использоваться в дальнейшем.
Назовем критической точкой беспропускного покрытия интервала (Bp, Hq) такую его точку rB, которая определяет минимальную ширину Пв полосы, обеспечивающую беспропускное покрытие этого интервала. Последнее означает, что при уменьшении ширины полосы от этого значения первой из точек интервала открывается точка rB. Аналогично определим критическую точку rH для интервала (Hq+1, Bp). Соответствующую ей ширину полосы беспропускного покрытия обозначим ПH. Критической точкой беспропускного покрытия параллели Rш назовем ту из точек rB и rH, для покрытия которой требуется большее значение ширины полосы. Величина
Пш(R) = max (ПB, ПH)
определяет искомое значение минимальной ширины полосы беспропускного покрытия параллели Rш. Затем, что на данной параллели каждой паре рассмотренных интервалов соответствует сdоя критическая точка, но все они вследствие повторяемости картины наложения захватов определяют одно и то же значение Пш (8).
Заметим, что если rB и rH - критические точки однократного покрытия соответствующих интервалов, то можно показать, что каждая из них является точкой стыковки двух разноименных захватов (правостороннего и левостороннего).
Из этого следует, что значения ПВ и ПH ширины полосы беспропускного покрытия соответствующих интервалов необходимо определять из условий стыковки разноименных захватов. Широтные узлы, к которым относятся стыкующиеся в критических точках захваты, определяются с учетом монотонного роста последних по П. Заметив, на основе несложного анализа, что в общем случае в критических точках rB и rH могут стыковаться только один правосторонний и один левосторонний захваты, можно привести условия стыковки захватов в этих точках к виду:
Поскольку функции αп(П)(п) и αл(П)(п) - монотонно возрастающие, то решения уравнений (9) имеют вид
Отсюда с учетом (8) получим искомое значение Пш (3), где для удобства функции α-1(Δ) обозначены как П(Δ).
Для беспропускного обзора не одной параллели, а широтного пояса необходимо взять максимальное из значений Пш, получающихся для отдельных параллелей данного пояса.
Рассмотрим, каким образом необходимо выбирать ширину беспропускного обзора с помощью N спутников. Заметим, что максимум величины (3) как функции широты покрываемой параллели в данном широтном диапазоне может достигаться на любой широте из диапазона. При этом значению ширины полосы беспропускного покрытия всего широтного пояса будет соответствовать (равна) одна из величин Пj(Δк), входящих в (3) - для некоторой широты ϕ*. Тот участок из Δк, (K= 1,2,3,4) (обозначим его κ), с которым связана данная величина, является критическим - для его покрытия требуется наибольшая полоса обзора. В связи с этим для уменьшения потребной полосы обзора заданного широтного пояса с помощью нескольких спутников пропорционально их общему числу представляется целесообразным размещать спутники на орбитах таким образом, чтобы они одновременно проходили экватор Земли на угловых расстояниях друг от друга, равных дуге 2κ/N.
Здесь коэффициент "2" объясняется тем, что участки Δк соответствуют односторонним захватам полосы, а покрываемый участок в два раза больше. При этом ширина полос обзора спутников, в которой производится получение изображений наземных объектов, должна выбираться из условия захвата указанной дуги параллели на широте ϕ*.
Рассмотрим практический пример использования предлагаемого способа, показывающий какое реальное значение может принимать величина выигрыша в ширине полосы по сравнению с прототипом. Пусть необходимо выбрать проектно-баллистические параметры некоторой космической системы, состоящей из одного и двух спутников (два варианта численного состава) и обеспечивающей беспропускное наблюдение наземной поверхности в широтном поясе [20o, 65o] при минимально потребной для этого ширине полос обзора бортовой аппаратуры спутников. (Исключение из числа наблюдаемых "маловажных" приэкваториальных районов Земли, лежащих в широтном поясе [0o, 20o], часто осуществляется для различных народнохозяйственных космических систем, например, метеорологического назначения.
Пусть также на наклонение и высоту орбиты спутников накладываются ограничения: первое равно 65o (наиболее "экономичное", с точки зрения затрат на выведение спутника, наклонение, реализуемое с российского полигона Плесецк), а вторая суть 226 км (высота широко используемой для космических систем народнохозяйственного назначения геосинхронной орбиты кратности m/n=16/1 - самой низкой реализуемой орбиты с суточной повторяемостью трассы).
На фиг. 4 показаны графики изменения значений ширины П полосы, необходимых для беспропускного обзора одним спутником фиксированной параллели и рассчитанных в указанных условиях соответственно для прототипа (Ппр) и предлагаемого способа (Псп), как функций широты ϕ рассматриваемой параллели. Из данных графиков видно, что минимально потребная ширина полосы для реализации предлагаемого способа составляет 1800 км, в то время как для прототипа соответствующее значение ширины полосы равно 2160 км. Имеющийся выигрыш в ширине полосы в 2160 км - 1800 км = 360 км может, например, позволить существенно улучшить линейное разрешение наблюдаемых объектов (уменьшить наихудшее значение разрешения, соответствующее точкам земной поверхности на краю полосы обзора), не говоря уже об ослаблении требований к бортовой аппаратуре, что во многих случаях определяет саму возможность создания той или иной космической системы.
Заметим, что, кроме того, указанный выигрыш в ширине полосы при других обстоятельствах может составить и много большую величину. Действительно, даже в рамках рассматриваемого примера сужение наблюдаемого широтного пояса в пределе к одной параллели на широте ϕ = 25° приводит к выигрышу 2060 км - 1100 км = 960 км, что составляет 47% от реализуемого в этом случае для прототипа значения ширины полосы (см. фиг. 4).
В рассмотренном примере беспропускной обзор осуществляется с помощью одного спутника. Для дополнительного уменьшения потребной ширины полосы при наличии большего числа спутников (в нашем примере двух спутников) в соответствии с изобретением рассчитаем на широте ϕ* (широте достижения максимума минимальной ширины полосы беспропускного обзора одним спутником) величину дуги κ. В рассматриваемых условиях данные значения, как показывают расчеты, следующие (см. фиг. 4)
ϕ*= 34,8°; κ = 10,85°.
Поэтому угловое расстояние между восходящими узлами орбит двух спутников необходимо выбрать равным
ΔΩ = 2κ/N = 2κ/2 = κ = 10,85°. (11)
Минимально потребная ширина полосы обзора двумя такими спутниками заданного широтного пояса выбирается из условия захвата дуги Δ - ΔΩ на широте ϕ* и равна
П = 995 км.
(При этом заметим, что по сравнению с полосой беспропускного обзора одним спутником, равной 1800 км, уменьшение происходит не ровно в два раза, так как функции П1(Δ) и П2(Δ) являются хотя и монотонными, но существенно нелинейными.)
Изменение расстояния ΔΩ между трассами спутников по отношению к значению (II) приводит в общем случае к увеличению потребной ширины полосы обзора по сравнению с ее величиной (12). (В небольших диапазонах данного изменения величина (12) может оставаться постоянной.)
Использование предлагаемого способа возможно при наличии того же объема средств выведения и обслуживаемых спутников, что и при реализации прототипа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАБЛЮДЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ ИЗ КОСМОСА | 1988 |
|
RU2076059C1 |
| СПОСОБ НАБЛЮДЕНИЯ ПОВЕРХНОСТИ ПЛАНЕТЫ ИЗ КОСМОСА И КОСМИЧЕСКАЯ СПУТНИКОВАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 2013 |
|
RU2535375C1 |
| Способ формирования группировки космических аппаратов для локального наблюдения заданной области планеты | 2017 |
|
RU2671601C1 |
| СПОСОБ ОРБИТАЛЬНОГО ПОСТРОЕНИЯ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ | 2004 |
|
RU2314232C2 |
| СИСТЕМА СПУТНИКОВ НАБЛЮДЕНИЯ ПЛАНЕТЫ | 2015 |
|
RU2595240C1 |
| СПОСОБ НАБЛЮДЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ ИЗ КОСМОСА | 1994 |
|
RU2075862C1 |
| СИСТЕМА СПУТНИКОВ НА ЭЛЛИПТИЧЕСКИХ ОРБИТАХ, ЭМУЛИРУЮЩАЯ ХАРАКТЕРИСТИКИ СИСТЕМЫ СПУТНИКОВ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2002 |
|
RU2223205C2 |
| СПУТНИКОВАЯ СИСТЕМА СВЯЗИ И НАБЛЮДЕНИЯ В ЗАДАННОМ ДИАПАЗОНЕ ШИРОТ | 2018 |
|
RU2689792C1 |
| СПУТНИКОВАЯ СИСТЕМА СВЯЗИ И НАБЛЮДЕНИЯ ПРИЭКВАТОРИАЛЬНЫХ ШИРОТ | 2017 |
|
RU2653063C1 |
| СПУТНИКОВАЯ СИСТЕМА НЕПРЕРЫВНОГО ГЛОБАЛЬНОГО ОБЗОРА ОКОЛОЗЕМНОГО КОСМИЧЕСКОГО ПРОСТРАНСТВА | 2017 |
|
RU2705027C2 |
Использование: в области космической техники, при создании космических систем, предназначенных для получения видовой информации об обширных районах земной поверхности в условиях жестких ограничений на потребную ширину полосы обзора искусственных спутников (ИС). Сущность изобретения: способ включает выведение ИС на кратные геосинхронные орбиты и получение на борту изображений наземных объектов, расположенных в полосах обзора ИС, причем эти изображения получают в полосках обзора, ширину которых, для одного ИС, выбирают по максимальному (по ϕ) значению некоторой величины П как функции широты ϕ в заданном диапазоне наблюдений и минимальных (по ϕ) значений параметров П1(Δ),П2(Δ), дающих зависимости потребной ширины полосы обзора ИС от покрываемой ею дуги Δ параллели на широте ϕ, соответственно справа и слева от точки пересечения параллели трассой ИС; при нескольких ИС их выводят на орбиты с одинаковыми наклонением, параметрами кратности и одновременным прохождением экватора Земли всеми ИС на определенных угловых расстояниях друг от друга, а изображения получают в полосах обзора, ширину которых выбирают из специальных условий захвата, определяемых широтой ϕ* максимума П и той из дуг Δ на широте ϕ*, для которой значение П1(Δ) или П2(Δ) равно максимому П. 4 ил., 1 з.п. ф-лы.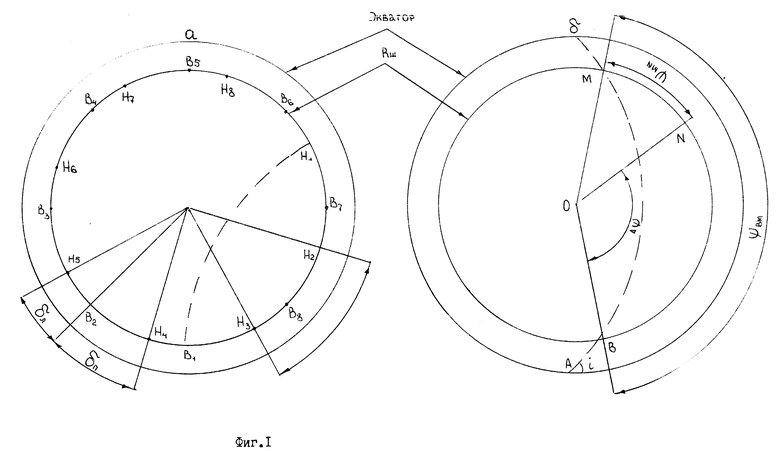
\ \\1 1. Способ наблюдения земной поверхности из космоса, включающий выведение по меньшей мере одного искусственного спутника на кратную геосинхронную орбиту и получение на борту спутника изображений наземных объектов, расположенных в полосе обзора спутника, отличающийся тем, что изображения наземных объектов получают в полосе обзора, ширину которой выбирают равной максимальному значению величины \\\6 $$$ \\\1 как функция широты $$$ в заданном широтном диапазоне наблюдений, \\\1 где $$$ зависимости потребной ширины полосы обзора спутника от величины покрываемой ею дуги $$$ параллели на широте $$$ соответственно справа и слева от точки пересечения параллели трассой спутника; \\\4 $$$ \\\4 $$$ дуга параллели, равная остатку от деления величины $$$ на $$$ \\\4 $$$ дуга параллели, дополняющая указанный остаток до $$$; \\\4 m, n - соответственно число драконических периодов обращения каждого из спутников и число эффективных периодов вращения Земли в одном периоде повторяемости трассы спутника; \ \\4 i - наклонение орбиты спутника. \ \ \ 2 2. Способ по п.1, отличающийся тем, что выводят несколько (N>>1) спутников на орбиты, характеризующиеся одинаковыми параметрами m, n, i и одновременным прохождением экватора Земли всеми спутниками на угловых расстояниях друг от друга, равных $$$ а изображения наземных объектов получают в полосах обзора спутников, ширину которых выбирают из условия захвата дуги $$$ параллели на широте $$$ где $$$ широта, при которой достигается максимум указанной величины П, а $$$ та из указанных величин $$$ дуг на широте $$$ для которой значение соответствующей ей функции $$$ равно указанному максимуму П.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство, SU N 333146, B 64 G 1/10, 27.03.92 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Баринов К.Н., Бурдаев М.Н., Мамон П.А | |||
| Динамика и принципы построения орбитальных систем КА | |||
| //М.: Машиностроение, 1975, с.51 - 53 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Robertson R.L., Low-Cost Earth Observation from Space//AIAA Paper | |||
| Цилиндрический сушильный шкаф с двойными стенками | 0 |
|
SU79A1 |
