Изобретение относится к электротехнике и может быть использовано в электрических машинах постоянного тока с дополнительными полюсами и компенсационной обмоткой.
Известна электрическая машина постоянного тока с устройством формирования коммутирующего поля [1], содержащая главные полюсы, дополнительные полюсы, наконечники которых выполнены со скосом в тангенциальном направлении, а обмотки возбуждения дополнительных полюсов получают подпитку от усилителей, управляемых специальной системой управления, датчик скорости изменения тока якоря, датчики скорости изменения коммутирующего и главного потоков и датчик частоты вращения якоря.
Устройство формирования коммутирующего поля коллекторной машины [1] позволяет, увеличивая ток, протекающий по обмоткам возбуждения группы дополнительных полюсов одной полярности (сбегающий край наконечников которых имеет меньший воздушный зазор, а набегающий край - больший воздушный зазор), и уменьшая ток, протекающий по обмоткам возбуждения группы дополнительных полюсов другой полярности (сбегающий край наконечников которых имеет больший, а набегающий край - меньший воздушный зазор), компенсировать несимметрию реактивной ЭДС относительно середины коммутационной зоны, вызванной коммутационными вихревыми токами.
Известная машина [1] имеет следующий недостаток.
Обмотки возбуждения дополнительных полюсов названной коллекторной электрической машины с устройством формирования коммутирующего поля соединены последовательно с обмоткой якоря. При этом коммутирующая ЭДС пропорциональна току якоря и частоте вращения якоря и компенсирует реактивную ЭДС, тогда как в режимах, близких к холостому ходу (ток якоря незначителен), коммутирующая ЭДС и реактивная ЭДС незначительны и характер коммутации практически полностью определяется ЭДС, наводимой полем главных полюсов. Влияние поля главных полюсов на коммутацию оказывается столь значительным, что может возникнуть необходимость уже в процессе наладки готовой машины уменьшать зону коммутации при соответствующей корректировке воздушного зазора под дополнительными полюсами [2] . Сужение коммутационной зоны ухудшает технико-экономические показатели машины (уменьшается коэффициент полюсного перекрытия, следовательно, ухудшается использование окружности якоря, при тех же геометрических размерах мощность машины уменьшается). Кроме того, корректировка воздушного зазора под дополнительными полюсами без разборки машины возможна только в случае применения специальных технических решений [3, 4].
Известны также технические решения [5-7], в основе которых лежат способы форсировки возбуждения дополнительных полюсов, в которых добавочная намагничивающая сила изменяется пропорционально скорости изменения тока якоря.
Недостатком известных технических решений [5-7] является следующее.
В машинах постоянного тока, работающих с быстро изменяющейся нагрузкой, магнитный поток дополнительных полюсов не успевает следовать за изменением тока якоря. Это отставание, являющееся причиной ухудшения коммутации, вызвано демпфирующим действием вихревых токов в массивных участках магнитной цепи. Регулирование степени возбуждения дополнительных полюсов по первой производной тока якоря не может обеспечить совпадения во времени t графиков
поскольку передний фронт кривой dI/dt при реальном дифференцировании с учетом помехоустойчивости недостаточно крут, а задний - излишне растянут. Здесь Фд и Фдн - текущее и номинальное значение потока возбуждения дополнительных полюсов, Ф
Известно также устройство форсировки возбуждения дополнительных полюсов электрических машин в динамических режимах [8], содержащее усилитель, подключенный к обмотке возбуждения дополнительных полюсов, датчик скорости изменения тока якоря, реальное дифференцирующее звено, подключенное к датчику скорости изменения тока якоря и управляемое детектором, один из входов которого соединен с выходом датчика скорости изменения тока якоря, другой - с выходом дифференцирующего звена, а выход детектора соединен с усилителем, от которого осуществляется подпитка обмотки возбуждения дополнительных полюсов.
Техническое решение [8] обеспечивает фактическое совпадение графиков Ф
Недостатки известного устройства [8] определяются наличием аналогового дифференцирующего звена, которое снижает помехоустойчивость работы любой системы, в том числе и управление форсировкой дополнительных полюсов.
Наиболее близким по технической сущности к заявляемой электрической машине постоянного тока с устройством формирования коммутирующего поля является выбранная в качестве прототипа электрическая машина постоянного тока с устройством формирования коммутирующего поля [9], содержащая главные полюсы, дополнительные полюсы, наконечники которых выполнены со скосом в тангенциальном направлении, с обмотками, подключенными к выходам усилителей, входы которых соединены с выходами блока расчета; датчик частоты вращения якоря, соединенный с первым входом блока расчета; датчик тока возбуждения, блок синхронизации и датчик наличия тока в цепи возбуждения главных полюсов, выход которого соединен со входом блока синхронизации, три выхода которого соединены со вторым, третьим и четвертым входами блока расчета, пятый и шестой входы которого соединены с выходами датчиков тока возбуждения главных полюсов и тока якоря.
Устройство формирования коммутирующего поля известной электрической машины [9] позволяет в любом режиме работы компенсировать ЭДС er, наводимую в коммутационной зоне полем главных полюсов и реактивную ЭДС ep путем создания коммутирующего поля нужной формы за счет подбора коэффициентов усиления q1 и q2 для усилителей, питающих обмотки возбуждения групп дополнительных полюсов, точечным способом наименьших квадратов, который обеспечивает оптимальную компенсацию (ep+er) в зоне коммутации.
Известная машина [9] имеет следующий недостаток. Настройка устройства формирования коммутирующего поля производится на прямолинейную коммутацию. Нелинейность изменения реактивной ЭДС в зависимости от частоты вращения якоря, связанная с демпфирующим действием вихревых токов [10, 11], реализуется на сложном функциональном преобразователе. При резком изменении параметров режима работы машины постоянного тока (скорости вращения якоря Ω, тока якоря I и тока возбуждения главных полюсов i) формирование коммутирующего поля регулированием только коэффициентов q1 и q2 происходит недостаточно быстро для получения удовлетворительного качества коммутации.
Целью изобретения является улучшение коммутации в любом динамическом режиме работы машины постоянного тока за счет настройки на оптимально ускоренную коммутацию и формирования коммутирующего поля путем подбора оптимальных значений управляющих сигналов, каждый из которых равен сумме соответствующего коэффициента усиления и составляющих, кратных его первой и второй производной.
Указанная цель достигается тем, что электрическая машина постоянного тока с устройством формирования коммутирующего поля, содержащая главные полюсы, дополнительные полюсы, наконечники которых выполнены со скосом в тангенциальном направлении, с обмотками, подключенными к выходам усилителей; датчик частоты вращения якоря; датчик тока якоря; датчик тока возбуждения; датчик наличия тока в цепи возбуждения главных полюсов, снабжена блоком синхронизации и блоком расчета, первый, второй и третий входы которого соединены с выходами датчика тока главных полюсов, датчика частоты вращения якоря, датчика тока якоря; четвертый, пятый, шестой, седьмой и восьмой входы блока расчета соединены с выходами блока синхронизации, вход которого подключен к выходу датчика наличия тока возбуждения главных полюсов; выходы блока расчета соединены с сигнальными входами усилителей, подающих питание на обмотки возбуждения дополнительных полюсов.
Сопоставительный анализ с прототипом показывает, что заявляемая электрическая машина постоянного тока с устройством формирования коммутирующего поля отличается новой реализацией блоков синхронизации и расчета.
Таким образом, заявляемая электрическая машина с устройством формирования коммутирующего поля соответствует критерию изобретения "новизна". Признаки, отличающие заявляемое техническое решение от прототипа, не выявлены в других технических решениях, следовательно, обеспечивают заявляемому решению соответствие критерию "существенные отличия".
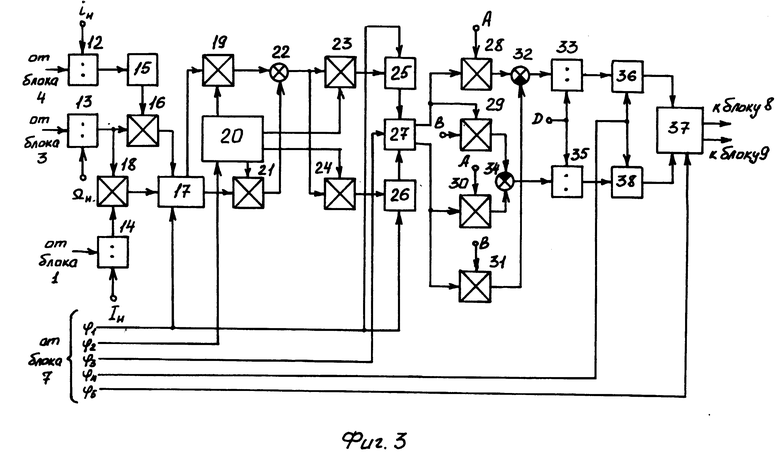
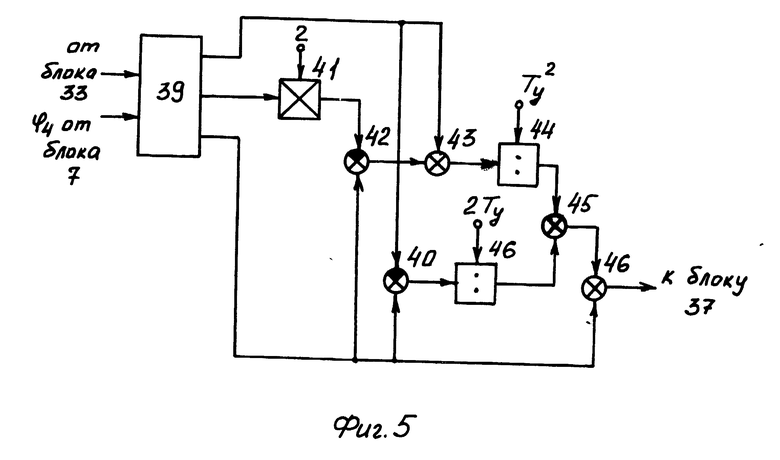
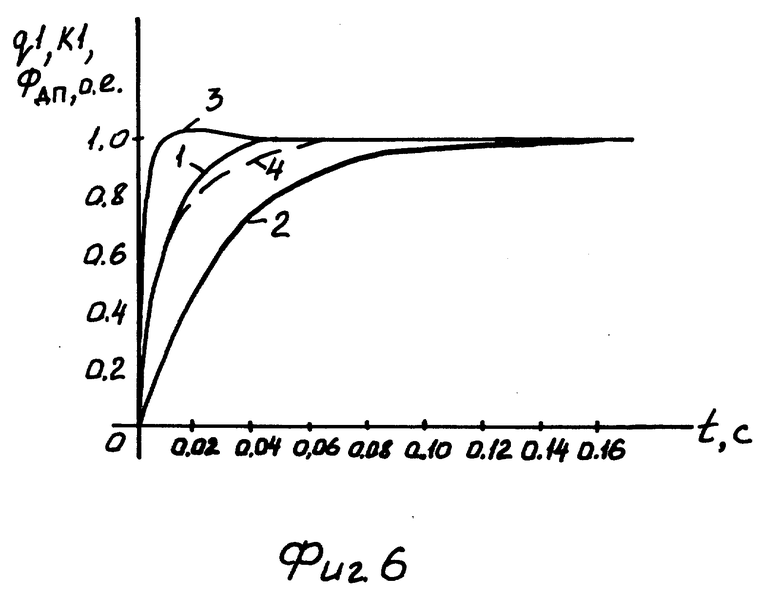
На фиг. 1 показана схема подключения машины к управляющим элементам, на фиг. 2 - базовые кривые реактивной ЭДС (1), соответствующие оптимально ускоренной коммутации, ЭДС, наводимой полем главных полюсов (2), ЭДС, наводимой под каждым дополнительным полюсом одной (3) и другой (4) полярности, результирующая коммутирующая ЭДС (5) в статическом режиме, на фиг. 3 - блок-схема блока расчета, на фиг. 4 - цикл работы устройства формирования коммутирующего поля предлагаемой машины, на фиг. 5 - блок-схема блока дифференцирования на примере блока дифференцирования коэффициента q1, на фиг. 6 - графики изменения коэффициента q1 (1), коммутирующего потока (2) прототипа, управляющего сигнала K1(t) (3) и коммутирующего потока (4) предлагаемой машины в совмещенных масштабах.
Устройство формирования коммутирующего поля предлагаемой электрической машины постоянного тока (фиг. 1) содержит датчик 1 тока якоря 2, датчик 3 частоты вращения якоря, датчик 4 тока возбуждения главных полюсов, выходы которых подключены к первому, второму и третьему входам блока 5 расчета. Кроме того, устройство содержит датчик 6 наличия тока в цепи возбуждения главных полюсов, выход которого соединен со входом блока 7 синхронизации, пять выходов которого соединены с четвертым, пятым, шестым, седьмым и восьмым входами блока 5 расчета, выходы которого соединены с сигнальными входами линейных тиристорных усилителей 8 и 9, подающих питание на независимые обмотки возбуждения дополнительных полюсов 10 и 11.
Задачей устройства формирования коммутирующего поля предлагаемой машины постоянного тока является обеспечение коэффициентов усиления q1 и q2 для усилителей 8 и 9 такой величины, чтобы коммутирующая ЭДС
ek(ωt) = K1(t)•e*k1(ωt)+K2(t)•e*k2(ωt)
как можно лучше компенсировала суммарную ЭДС [ep(ωt)+eг(ωt)].
Здесь

где
a1, b1, a2, b2 - коэффициенты, определяемые соотношением параметров обмоток возбуждения дополнительных полюсов в динамических режимах;
e
Методика расчета коэффициентов q1 и q2 предлагаемой машины аналогична соответствующей методике расчета прототипа.
Нужно рассчитать такие q1 и q2, чтобы ЭДС ek(ωt) = q1•e
Поставленная задача решается путем точечного квадратичного аппроксимирования [12] заданной функции f(ωt) = ep(ωt)+eг(ωt)] полиномом Q = q1•e
По точечному методу наименьших квадратов за меру отклонения полинома Q(ωt) от функции f(ωt) принимают величину
Равную сумме квадратов отклонений полинома Q(ωt) от функции f(ωt) на заданной системе точек. Очевидно, задача сводится к минимизации S методом подбора q1 и q2, удовлетворяющих этому условию, для чего найдем частные производные dS/dq1 и dS/dq2. Приравнивая эти частные производные нулю, получим систему уравнений с двумя неизвестными q1 и q2
Здесь e
После раскрытия скобок и перенесения свободных членов в правые части уравнений (3) преобразуется к виду: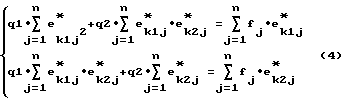
Таким образом, расчет коэффициентов усиления сводится к решению системы уравнений вида:
где

постоянные величины для данной машины, а
и
коэффициенты, зависящие от режима работы.
Главный определитель системы (5)
также является постоянной величиной для данной машины, а вспомогательные определители

это коэффициенты, зависящие от режима ее работы. Коэффициенты q1 и q2 рассчитываются по формулам
q1=D1/D, (13)
q2=D2/D. (14)
Блок 5 расчета (фиг. 3) включает в себя блоки деления 12, 13 и 14, первые входы которых соединены с выходами датчиков 4, 3 и 1 соответственно, а на вторые входы поступают сигналы, соответствующие номинальным значениям тока возбуждения главных полюсов iн, частоты вращения якоря Ωн и тока якоря Iн соответственно.
С выхода блока 12 деления сигнал, соответствующий току возбуждения главных полюсов в относительных единицах i*, поступает на вход функционального преобразователя 15, реализующего кривую намагничивания в относительных единицах, выход которого соединен с первым входом блока умножения 16, второй вход которого соединен с выходом блока 13, генерирующего сигнал, соответствующий частоте вращения якоря в относительных единицах Ω*.
С выхода блока 16 умножения сигнал, соответствующий параметру режима R1 = Ω*Ф*, поступает на вход блока 17 хранения параметров режима, второй вход которого соединен с первым выходом блока 7 синхронизации.
С выхода блока 14 сигнал, соответствующий величине тока якоря в относительных единицах I*, поступает на первый вход блока 18 умножения, второй вход которого соединен с выходом блока 13, а с выхода блока 18 сигнал, соответствующий параметру режима R2 = Ω*I*, поступает на третий вход блока 17 хранения параметров режима.
Первый выход блока 17 соединен с первым входом блока 19 умножения, на второй вход которого поступает сигнал, соответствующий базовой ЭДС e
Выходы блоков 19 и 21 соединены с первым и вторым входами сумматора 22, с выхода которого сигнал, соответствующий сумме (e
Здесь e для j-й точки из системы, состоящей из n равномерно распределенных по ширине коммутационной зоны точек.
для j-й точки из системы, состоящей из n равномерно распределенных по ширине коммутационной зоны точек.
С выходов блоков 23 и 24 умножения сигналы, соответствующие произведениям (epj+eгj)•e
Выход блока умножения 29 соединен с первым входом сумматора 34, на второй вход которого поступает сигнал с выхода блока умножения 30, а выход соединен с первым входом блока деления 35, на второй вход которого поступает сигнал, соответствующий коэффициенту D (10).
Выход блока деления 33 соединен с первым входом блока дифференцирования 36, второй вход которого подключен к четвертому выходу блока 7 синхронизации, а выход соединен с первым входом блока хранения коэффициентов усиления 37.
Выход блока деления 35 соединен с первым входом блока дифференцирования 38, второй вход которого подключен к четвертому выходу блока 7 синхронизации, а выход соединен со вторым входом блока хранения коэффициентов усиления 37.
Третий вход блока 37 соединен с пятым выходом блока 7 синхронизации. Первый выход блока 37 соединен с сигнальным входом линейного тиристорного усилителя 8 (фиг. 1); второй выход блока 37 соединен с сигнальным входом линейного тиристорного усилителя 9 (фиг. 1).
Блоки дифференцирования 36 и 38 реализуют расчет первых и вторых производных коэффициентов q1 и q2, вычисляют их суммы и производят расчет K1 и K2 по (1) и (2) соответственно.
Расчет производных осуществляется посредством численного дифференцирования для равностоящих узлов по формулам:
Здесь q1' и q2' - первые производные по времени коэффициентов усиления q1 и q2; q1'' и q2'' - вторые производные по времени коэффициентов усиления q1 и q2; q1-1, q10, q2-1, q20 - величины коэффициентов усиления q1 и q2, рассчитанные в двух предыдущих циклах работы; q1, q2 - величины коэффициентов усиления, рассчитанные в текущем цикле работы устройства;
Tу - цикл работы устройства формирования коммутирующего поля, величина которого определяется временем Tц расчета коэффициентов K1 и K2 и инерционностью силовой цепи возбуждения дополнительных полюсов Tдп (фиг. 4).
Блоки дифференцирования 36 и 38 имеют одинаковую структуру, показанную на фиг. 5 для блока 36. Выход блока деления 33, генерирующего сигнал, соответствующий коэффициенту усиления q1, соединен с первым входом блока 39 хранения трех значений коэффициента q1, обозначаемых q1-1, q10, q1.
Второй вход блока 39 соединен с четвертым выходом блока 7 синхронизации.
С первого выхода блока 39 сигнал, соответствующий q1, подается на первый вход сумматора 40, второй вход которого соединен с третьим выходом блока 39, генерирующим сигнал, соответствующий q1-1.
Со второго выхода блока 39 сигнал, соответствующий q10, поступает на первый вход блока умножения 41, на второй вход которого подается постоянный сигнал, соответствующий 2, а выход соединен с первым входом сумматора 42, второй вход которого соединен с первым выходом блока 39, а выход - с первым входом сумматора 43. Второй вход сумматора 43 соединен с третьим выходом блока 39; а выход сумматора 43 соединен с первым входом блока деления 44, на второй вход которого подается постоянный сигнал, соответствующий коэффициенту T
Выход сумматора 40 соединен с первым входом блока деления 46, на второй вход которого подается постоянный сигнал, соответствующий коэффициенту 2Tу, а выход соединен со вторым входом сумматора 45.
Выход сумматора 45 соединен с первым входом сумматора 46, второй вход которого подключен к первому выходу блока 39; а выход соединен с первым входом блока 37 хранения коэффициентов усиления.
Предлагаемая электрическая машина постоянного тока с устройством формирования коммутирующего поля работает следующим образом. При наличии тока в цепи обмотки возбуждения главных полюсов блок 7 синхронизации выдает управляющие сигналы в соответствии с временной диаграммой фиг. 4. По импульсу последовательности ϕ1, получаемой на первом выходе блока 7, параметры режима R1 и R2 фиксируются в блоке 17 (фиг. 3) до поступления следующего импульса этой последовательности, т.е. на весь цикл Tу работы устройства. По этому же импульсу последовательности ϕ1 обнуляются интеграторы 25 и 26.
С приходом j-го импульса последовательности ϕ2 на вход блока 20 на соответствующих выходах этого блока появляются сигналы, соответствующие e на выходе интегратора 26 формируется сигнал, соответствующий сумме
на выходе интегратора 26 формируется сигнал, соответствующий сумме  Если j<n, то накопление сумм на интеграторах 25 и 26 продолжается. Если j=n, то на выходах интеграторов 25 и 26 будут иметь место сигналы, соответствующие коэффициентам C1 (8) и C2 (9), которые по импульсу последовательности ϕ3 будут зафиксированы в блоке 27 хранения коэффициентов C1 и C2 до следующего импульса этой последовательности и поступят в выходную часть блока расчета. На блоках 28-35 реализуется вычисление коэффициентов D1, D2, q1 и q2. Сигнал на выходе сумматора 32 соответствует коэффициенту D1; сигнал на выходе сумматора 34 - коэффициенту D2; сигнал на выходе блока деления 33 - коэффициенту q1; сигнал на выходе блока 35 - коэффициенту q2. Расчет новых q1 и q2 завершен. По импульсу последовательности ϕ4 значения q1 и q2 фиксируются в блоках 36 и 38 дифференцирования и производится расчет коэффициентов K1 и K2, которые по импульсу последовательности ϕ5 фиксируются в блоке 37 хранения коэффициентов и поступают с его выходов на сигнальные входы линейных тиристорных усилителей 8 и 9 (фиг. 1).
Если j<n, то накопление сумм на интеграторах 25 и 26 продолжается. Если j=n, то на выходах интеграторов 25 и 26 будут иметь место сигналы, соответствующие коэффициентам C1 (8) и C2 (9), которые по импульсу последовательности ϕ3 будут зафиксированы в блоке 27 хранения коэффициентов C1 и C2 до следующего импульса этой последовательности и поступят в выходную часть блока расчета. На блоках 28-35 реализуется вычисление коэффициентов D1, D2, q1 и q2. Сигнал на выходе сумматора 32 соответствует коэффициенту D1; сигнал на выходе сумматора 34 - коэффициенту D2; сигнал на выходе блока деления 33 - коэффициенту q1; сигнал на выходе блока 35 - коэффициенту q2. Расчет новых q1 и q2 завершен. По импульсу последовательности ϕ4 значения q1 и q2 фиксируются в блоках 36 и 38 дифференцирования и производится расчет коэффициентов K1 и K2, которые по импульсу последовательности ϕ5 фиксируются в блоке 37 хранения коэффициентов и поступают с его выходов на сигнальные входы линейных тиристорных усилителей 8 и 9 (фиг. 1).
В статических режимах K1=q1, K2=q2 и устройство формирования коммутирующего поля предлагаемой машины работает так же, как в известной машине [9] .
В динамических режимах K1 и K2 рассчитываются по (1) и (2), тем самым осуществляется форсировка управляющих сигналов, поступающих на сигнальные входы усилителей, подающих питание на независимые обмотки возбуждения дополнительных полюсов. Путем подбора коэффициентов a1, b1, a2, b2, зависящих от параметров независимых обмоток возбуждения дополнительных полюсов, получают практически полное совпадение во времени графиков изменения управляющих сигналов и тока в обмотках дополнительных полюсов.
На фиг. 6 показаны в совмещенных масштабах график q1(t) (1), кривая изменения тока обмотки возбуждения соответствующего дополнительного полюса (2) при Tдп= 3Tц, а также изменение управляющего сигнала K1(t) (3), полученное при a1=0,005, b1=0,00005.
Блок 5 расчета вместе с блоком 7 синхронизации может быть реализован на базе управляющей вычислительной машины. При этом сигналы с датчиков поступают в управляющую вычислительную машину через аналого-цифровые преобразователи. Блок задания базового режима реализуется при этом в виде совокупности массивов чисел, размерностью n каждый, в памяти управляющей вычислительной машины. Там же хранятся коэффициенты iн, Ωн, Iн,A, B, D, a1, b1, a2, b2. Рассчитанные в управляющей вычислительной машине коды сигналов K1 и K2 подаются на цифро-аналоговые преобразователи. Соответствующие этим кодам аналоговые сигналы поступают на входы линейных тиристорных усилителей, подающих питание на независимые обмотки возбуждения дополнительных полюсов. При этом управляющая вычислительная машина работает только при наличии сигнала с датчика наличия тока в цепи возбуждения главных полюсов, который может быть реализован с оптронной парой.
В случае многополюсной машины тиристорные усилители, подающие питание на обмотки возбуждения дополнительных полюсов, подключаются параллельно каждой группе катушек дополнительных полюсов, соединенных последовательно друг с другом, аналогично группе катушек дополнительных полюсов прототипа.
Источники информации
1. А.с. СССР N 1506501, H 02 K 13/14, 1989, БИ, N 33.
2. Калиниченко С.П., Шофул В.К. Влияние главного поля на искрение набегающего края щеток в машине постоянного тока. - Техническая электродинамика, 1989, N 1, с. 105-106.
3. А.с. СССР N 1153375, H 02 K 1/10, 1985, БИ, N 16.
4. А.с. СССР N 1377963, H 02 K 1/10, 1988, БИ, N 8.
5. А.с. СССР N 462253, H 02 K 13/14, 1963.
6. А.c. N 584382, H 02 K 13/14, 1970.
7. ПНР N 93640, H 02 K 3/20, 1979.
8. А.с. СССР N 1026243A, H 02 K 13/14, 30.06.83.
9. А.с. СССР N 1758779A1, H 02 K 13/14, 1992, БИ, N 32.
10. Битюцкий И.Б. Новый подход к расчету реактивной ЭДС машины постоянного тока. //Электромеханика, 1987, N 7, С. 41-47 (Изв.высш.учеб. заведений).
11. Битюцкий И.Б. К расчету реактивной ЭДС коммутации. //Электромеханика, 1990, N 5, С. 34-39. (Изв.высш.учеб. заведений).
12. Демидович Б.П., Марон И.А., Шувалова Э.З. Численные методы анализа. - М.: Наука, 1967, с. 22-24.


Изобретение может быть использовано в электрических машинах постоянного тока с дополнительными полюсами и компенсационной обмоткой. Для улучшения коммутации в любом динамическом режиме работы машины постоянного тока за счет настройки на оптимально ускоренную коммутацию и устранения запаздывания коммутирующего потока по отношению к управляющим сигналам, связанного с инерционностью системы возбуждения дополнительных полюсов, устройство формирования коммутирующего поля снабжено блоком синхронизации и блоком расчета, входы которого соединены с выходами датчиков частоты вращения якоря, тока якоря и тока возбуждения главных полюсов, а также с выходами блока синхронизации, вход которого соединен с выходом датчика наличия тока возбуждения главных полюсов. Выходы блока расчета соединены с сигнальными входами усилителей, подающих питание на обмотки возбуждения дополнительных полюсов. Техническим результатом является увеличение быстродействия и улучшение качества коммутации. 6 ил.
Электрическая машина постоянного тока с устройством формирования коммутирующего поля, содержащая главные полюсы, дополнительные полюсы, наконечники которых выполнены со скосом в тангенциальном направлении с обмотками, подключенными к выходам усилителей, подающих питание на обмотки возбуждения дополнительных полюсов, датчик частоты вращения якоря, датчик тока якоря, датчик тока возбуждения главных полюсов, датчик наличия тока в цепи возбуждения главных полюсов, блок синхронизации, вход которого подключен к выходу датчика наличия тока в цепи возбуждения главных полюсов, а также блок расчета, реализующий функцию вычисления коэффициентов усиления q1 и q2 усилителей, первый, второй и третий входы которого соединены с выходами датчиков наличия тока возбуждения главных полюсов, частоты вращения якоря и тока якоря, четвертый, пятый и шестой входы блока расчета соединены с тремя выходами блока синхронизации, а выходы блока расчета соединены с сигнальными входами усилителей, отличающаяся тем, что блок расчета выполнен с возможностью реализации дополнительной функции вычисления первой и второй производных по времени коэффициентов усиления q1 и q2 усилителей и расчета управляющих сигналов K1 и K2 для усилителей по формулам

а блок синхронизации снабжен четвертым и пятым выходами, соединенными с введенными седьмым и восьмым входами блока расчета, причем четвертый выход блока синхронизации предназначен для фиксации коэффициентов усиления q1 и q2 усилителей в блоке расчета и вычисления в нем управляющих сигналов K1 и K2 для усилителей, а пятый выход блока синхронизации - для фиксации в блоке расчета управляющих сигналов K1 и K2 для усилителей и выдачи их на сигнальные входы усилителей, где q1 и q2 - коэффициенты усиления, рассчитываемые путем точечного квадратичного аппроксимирования функции
f(ωt) = ep(ωt)+eг(ωt)
полиномом
Q = q1•e
где ep(ωt) - реактивная ЭДС для текущего режима;
eг(ωt) - ЭДС, наводимая в коммутационной зоне полем главных полюсов для текущего режима;
e
ω = pΩ, p - число пар полюсов, Ω - частота вращения якоря;
a1, b1, a2, b2 - коэффициенты, определяемые соотношением параметров обмоток возбуждения дополнительных полюсов и якорной обмотки, задающие степень форсировки дополнительных полюсов в динамических режимах.
| Электрическая машина постоянного тока с устройством формирования коммутирующего поля | 1990 |
|
SU1758779A1 |
| Коллекторная электрическая машина с устройством формирования коммутирующего поля | 1987 |
|
SU1506501A1 |
| Способ улучшения коммутации коллекторных электрических машин в динамических режимах | 1985 |
|
SU1277302A1 |
| Способ получения на волокне оливково-зеленой окраски путем образования никелевого лака азокрасителя | 1920 |
|
SU57A1 |
