Изобретение относится к приборостроению, а именно к устройствам, предназначенным для измерения параметров движения летательных аппаратов и является усовершенствованием устройства, описанного в авторском свидетельстве.
Известен акселерометр, используемый для измерения скорости и ускорения подвижных объектов. Чувствительный элемент этого прибора состоит из трех кварцевых пластин: одной центральной и двух боковых. Центральная пластина представляет собой плоский диск, имеющий незамкнутую кольцевую прорезь, за счет выполнения которой в диске образуется подвижная часть (маятник), связанная с неподвижной (опорное кольцо) двумя упругими перемычками, образующими подвес. На маятнике (с двух сторон) прикреплены обмотки датчика момента и нанесено металлизированное покрытие. На боковых пластинах также имеются металлизированные покрытия, образующие в совокупности с металлизированным покрытием центральной пластины дифференциальный емкостной датчик угла (датчик положения). Зазор между подвижной и неподвижными пластинами образован тремя выступами на каждой из боковых пластин, между которыми закреплено неподвижное опорное кольцо центральной пластины.
Известно, что в любом емкостном датчике угла при подаче на него напряжения возникают силы, которые стремятся сблизить обкладки конденсатора. Величина этих усилий, в основном, зависит от величины емкости и от величины поданного напряжения в квадратичной степени. В дифференциальном же датчике положения акселерометра эти усилия направлены в разные стороны. При этом при равенстве емкостей слева и справа эти усилия одинаковы и даже при изменении напряжения питания, подаваемого на датчик положения, суммарное усилие оказывается равным нулю.
Однако при действии на маятник внешних сил, возникающих при измерении ускорения, величина которого может меняться в широких пределах, маятник отклоняется от своего первоначального положения, при котором емкости были равны. Это приводит к нарушению равенства сил и к появлению так называемой электростатической составляющей момента тяжения, т. е. к появлению дополнительного вредного уводящего момента, т.к. появляющаяся результирующая сила направлена в сторону движения маятника относительно оси подвеса. Правда, зная траекторию полета и программное значение измеряемых параметров движения, можно вносить поправки в выходную информацию с помощью бортовой вычислительной машины (БЦВМ) и таким образом в какой-то мере компенсировать появляющуюся дополнительную погрешность при появлении рассогласования в датчике положения. Однако это будет частичная компенсация систематической составляющей тяжения, а случайная составляющая зависит от величины и стабильности напряжения источника питания (квадратичная зависимость, как было указано выше). Чтобы исключить погрешность от этой составляющей, необходимо весьма точно (до тысячных долей %) стабилизировать напряжение источника питания. Оба эти пути вызывают введение дополнительных довольно сложных устройств, которые существенно увеличивают вес и габариты объекта, на котором находится акселерометр, но которые не обеспечивают полного устранения указанной погрешности.
К появлению указанной погрешности может привести также уход нуля усилителя обратной связи акселерометра после межрегламентной проверки.
Целью дополнительного изобретения является повышение точности прибора за счет исключения электростатической составляющей тяжения при отклонении маятника от среднего положения. Это достигается тем, что в акселерометр введены четыре прямоугольных пластины, две из которых закреплены на маятнике со стороны, противоположной подвесу, перпендикулярно ему и симметрично относительно продольной оси маятника, а две другие на неподвижной части прибора установлены параллельно первым двум и обращены друг к другу металлизированными поверхностями, причем металлизированная поверхность одной из неподвижных пластин разделена изолирующим слоем на две симметрично расположенные равные части.
Это позволяет использовать одну пару таких пластин (подвижную и неподвижную) в качестве дифференциального емкостного датчика положения, а другую пару, в которой неподвижная пластина без прорези, - в качестве бестокоподводного устройства подачи питания на емкостной датчик, т.е. принципиальная электрическая схема прототипа совпадает с предлагаемой электрической схемой и практически не требует переделки системы обратной связи прибора. Однако предлагаемое техническое решение месторасположения датчика положения при отклонении маятника от среднего положения не приводит к появлению дополнительного вредного уводящего момента, так как силы, возникающие в датчике положения при этом, направлены параллельно оси подвеса.
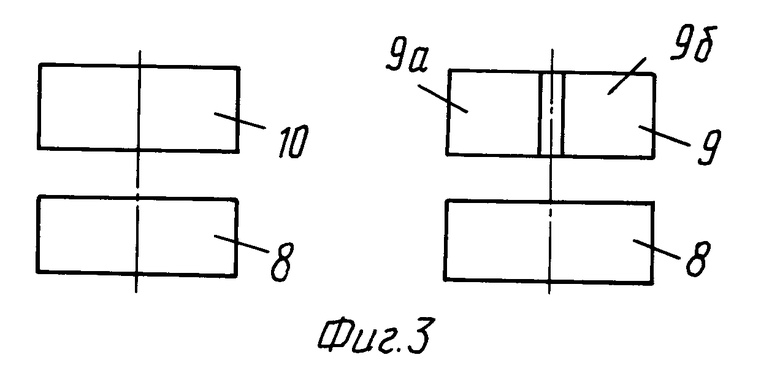
На фиг.1 изображен общий вид описываемого устройства, на фиг.2 - вид центральной пластины, а на фиг.3 - вид дополнительно вводимых пластин емкостного датчика.
Чувствительный элемент акселерометра включает в себя центральную пластину 1, которая с помощью упругого подвеса 2 образует маятник 3. На маятнике 3 укреплены катушки 4 магнитоэлектрического датчика момента, статоры 5 которого расположены на боковых пластинах 6. Зазор между центральной и боковыми пластинами образуется с помощью трех выступов (платиков) 7, расположенных на боковых пластинах под углом 120o. В верхней части маятника укреплены пластины 8, а на неподвижной части соответственно ответные пластины 9 и 10 (показаны пунктиром).
При нахождении маятника в среднем положении площадь перекрытия пластиной 8 поверхностей 9а и 9б пластины 9 одинаковы. При отклонении маятника от среднего положения равенство перекрытия площадей упомянутых пластин 8 и 9 нарушается и дифференциальный емкостной датчик положения, который образуется с помощью этих пластин, сигнализирует об этом. Через другую пару пластин 8 и 10 подается питание на вышеуказанный датчик положения и величина подаваемого напряжения через пластину 10, не имеющую прорези в средней части, не зависит от местоположения маятника. Возникающая разностная сила в предлагаемом техническом решении, как видно из приведенных фигур, будет направлена вдоль оси подвеса 2 (будет находиться в плоскости маятника) и не создает вредного уводящего момента. При этом следует иметь в виду, что жесткость упругого подвеса в поперечном направлении на 3-4 порядка выше, чем в направлении движения маятника.
Использование изобретения позволит увеличить точность прибора за счет исключения влияния электростатической составляющей тяжения. Это особенно важно, если прибор работает в условиях широкого диапазона измеряемых ускорений.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКСЕЛЕРОМЕТР | 1986 |
|
RU2085954C1 |
| АКСЕЛЕРОМЕТР | 1981 |
|
RU2120638C1 |
| АКСЕЛЕРОМЕТР | 1983 |
|
RU2046346C1 |
| АКСЕЛЕРОМЕТР | 1982 |
|
RU2120639C1 |
| АКСЕЛЕРОМЕТР | 1985 |
|
RU2045761C1 |
| АКСЕЛЕРОМЕТР | 1983 |
|
RU2120640C1 |
| СПОСОБ УМЕНЬШЕНИЯ МОМЕНТА ТЯЖЕНИЯ В МАЯТНИКОВОМ АКСЕЛЕРОМЕТРЕ | 1990 |
|
RU2112987C1 |
| АКСЕЛЕРОМЕТР | 1990 |
|
RU2120642C1 |
| АКСЕЛЕРОМЕТР | 1985 |
|
SU1840346A2 |
| АКСЕЛЕРОМЕТР | 1990 |
|
RU2063047C1 |

Использование: приборы инерциальной навигации, акселерометрия. Сущность изобретения: в акселерометре по основному авторскому свидетельству поверхности обкладок емкостного датчика располагаются перпендикулярно оси подвеса маятника 3. 3 ил.
Акселерометр, содержащий корпус, подвижную часть, подвес подвижной части, дифференциальный емкостной датчик смещения, неподвижные пластины которого размещены на корпусе по обеим сторонам подвижной части, а подвижные пластины закреплены на подвижной части на обращенных к неподвижным пластинам сторонах, токоподводы, усилительно-преобразовательный блок, выходы которого соединены с неподвижными пластинами емкостного датчика, блок питания емкостного датчика, две дополнительные электрически соединенные друг с другом неподвижные пластины, расположенные по обеим сторонам подвижной части и подключенные к блоку питания емкостного датчика, при этом подвижные пластины электрически соединены друг с другом, отличающийся тем, что, с целью повышения точности, в него введены четыре прямоугольные пластины, две из которых закреплены на маятнике перпендикулярно ему и симметрично относительно его продольной оси со стороны, противоположной подвесу, а две другие пластины закреплены на неподвижной части прибора параллельно первым двум пластинам и обращены друг к другу металлизированными поверхностями, причем металлизированная поверхность одной из неподвижных пластин разделена изолирующим слоем на две симметрично расположенные равные части.
