Изобретение относится к технике дистанционного измерения оптико-физических параметров атмосферы.
Известно устройство для счета фотонов (а.с. 1182277 СССР, МКИ4 G 01 J 1/44, - БИ 36, 1985), входящее в состав лидарной системы лазерного зондирования атмосферы. Устройство содержит последовательно соединенные фотоэлектронный умножитель (ФЭУ), амплитудный дискриминатор (АД) и счетчик, выход которого соединен со счетными входами первого и второго оперативных запоминающих устройств (ОЗУ), выходы которых подключены к первому входу сумматора, выход которого через третье ОЗУ подключен к второму входу сумматора и входу электронно-вычислительной машины (ЭВМ), которая управляет работой блока управления (БУ), состоящего из последовательно соединенных первого генератора тактовых импульсов (ГТИ) и адресного счетчика. Выход блока управления подключен к управляющим входам третьего ОЗУ и коммутатора адресов, который управляет работой первого и второго ОЗУ. Выход блока синхронизации соединен с входами блока управления, триггера и через второй ГТИ и второй адресный счетчик - с коммутатором. Выход триггера подключен к коммутатору адресов, первому и второму ОЗУ.
Признаками аналога, совпадающими с признаками заявляемого технического решения, являются амплитудный дискриминатор, счетчик, адресный счетчик, генератор тактовых импульсов и ОЗУ.
Недостатками известного устройства являются высокая избыточность собираемой информации при потребляемой системой слишком большой мощности.
Причины, препятствующие достижению требуемого технического результата, состоят в следующем.
По существу известное устройство регистрирует обратное рассеяние лазерного излучения в функции времени для формирования данных об оптико-физических параметрах атмосферы. Оптический импульс излучения, проходя через оптическую схему передатчика лидара, частично отклоняется на приемник блока синхронизации, где преобразуется в электрический импульс для запуска первого ГТИ в блоке управления, второго ГТИ и переброса триггера. Первый ГТИ работает с частотой, обеспечивающей процесс суммирования данных из первого или второго ОЗУ за время, меньшее чем период следования импульсов зондирования. Второй ГТИ обеспечивает необходимое пространственное разрешение, т.к. его частота определяется временем записи данных в одно из первых двух ОЗУ, и это время значительно меньше, чем время, требуемое для считывания, суммирования и записи для третьего ОЗУ.
Какое из первых двух ОЗУ находится в данном цикле измерения в режиме записи, а какое - в режиме считывания, определяется состоянием триггера, управляющего синхронно и направлением передачи потоков адресов в коммутатор адресов.
В первом и втором ОЗУ скорость смены адресов определяется режимом, в котором это устройство работает. Если в данный момент первое ОЗУ находится в режиме записи, то через коммутатор адресов на его адресные входы поступают адреса со второго адресного счетчика. Скорость смены последних определяется длительностью временных интервалов (пространственным разрешением). В это же время второе ОЗУ находится в режиме считывания и на его адресные входы через коммутатор адресов в первого адресного счетчика поступают адреса. Скорость смены этих адресов определяется как быстродействием третьего ОЗУ, так и процессами считывания, суммирования, записи и обмена данными между ОЗУ.
После многократного повторения циклов записи/суммирования в ячейках третьего ОЗУ накапливается информация о числе принятых ОИ, которая передается в ЭВМ.
Из приведенного описания работы известного устройства следует, что устройство измеряет количество ОИ во всех последовательных временных интервалах, длительность которых задается первым ГТИ. В то же время информацию о границе аномалий в атмосфере и ее параметрах несет ограниченное число временных элементов разложения. Такая высокая избыточность собираемой информации потребует большой емкости и быстродействия всех трех ОЗУ и, как следствие, слишком большой мощности потребления.
Известно устройство для счета фотонов с сортировкой по коротким временным интервалам, представляющее основной узел портативного лидара (Кайл Т. , Клементс В. Схема для счета фотонов с сортировкой по коротким временным интервалам //Приборы для научных исследований. 1983, N 12, c. 198-199). Устройство содержит последовательно соединенные ФЭУ, формирователь импульсов (ФИ) и регистр сдвига, выход которого соединен с ЭВМ. Вход лазерного передатчика соединен с выходом первого элемента И-НЕ, на первый вход которого заведен сигнал разрешения запуска лазера. Второй вход первого элемента И-НЕ подключен к инвертирующему выходу одновибратора, неинвертирующий выход которого соединен в первым входом триггера-фиксатора, второй вход которого подключен к выходу адресного счетчика, вход которого объединен с выходом третьего элемента И-НЕ и первым входом четвертого элемента И-НЕ, на второй вход которого заведены импульсы сдвига.
Выход четвертого элемента И-НЕ соединен с управляющим входом регистра сдвига. Выход триггера-фиксатора подключен к первому входу третьего элемента И-НЕ, второй вход которого объединен с выходом ГТИ и вторым входом второго элемента И-НЕ, выход которого подключен к входу одновибратора, а первый вход является входом запуска устройства.
Триггер-фиксатор состоит из пятого и шестого элементов И-НЕ, причем выход пятого элемента И-НЕ подключен к первому входу шестого элемента И-НЕ, второй вход которого является вторым входом триггера-фиксатора, первым входом которого является первый вход пятого элемента И-НЕ, второй вход которого объединен с выходом шестого элемента И-НЕ и является выходом триггера-фиксатора.
Каждый импульс лидара запускается микропроцессором, который посылает соответствующий командный импульс на вход запуска. В момент, когда на второй вход второго элемента И-НЕ воздействует импульс с ГТИ, одновибратор сбрасывает триггер-фиксатор и посылает поджигающий импульс на лазер. Отсутствие сигнала разрешения запуска лазера на первом входе первого элемента И-НЕ блокирует запуск лазера, позволяя контролировать работу всей остальной схемы.
Поступающие с ФЭУ импульсы подаются на формирователь импульсов, который удлиняет их до длительности измерительного интервала. Этот ФИ позволяет регистрировать импульсы, поступившие в течение двух последовательных интервалов, поскольку второй из поступивших импульсов перезапускает его так, как если бы первого импульса не было.
На этапе регистрации данных сдвигами в регистре сдвига управляет ГТИ, период следования импульсов которого регистрирует адресный счетчик. Когда содержимое адресного счетчика достигает числа временных каналов, срабатывает триггер-фиксатор. При этом третий элемент И-НЕ блокирует поступление тактовых импульсов на адресный счетчик и регистр сдвига.
К моменту, когда адресный счетчик взводит триггер-фиксатор, данные уже занесены в регистр сдвига. Импульсы сдвига от микропроцессора через четвертый элемент И-НЕ списывают содержимое регистра сдвига в ЭВМ. При этом каждый бит, переносимый из регистра сдвига, добавляется к содержимому соответствующего временного канала в памяти ЭВМ.
Микропроцессор контролирует окончание цикла измерения, вырабатываемого триггером-фиксатором. По окончании считывания содержимого регистра сдвига выдается команда на сброс адресного счетчика и, как следствие, на сброс триггера-фиксатора.
Признаками этого аналога, совпадающими с признаками заявляемого технического решения являются лазерный передатчик, адресный счетчик, одновибратор, формирователь импульсов, ГТИ, четыре элемента И (элементы И-НЕ).
Недостатками известного устройства являются низкое отношение сигнал/шум и высокая погрешность измерения оптико-физических параметров атмосферы.
Причины, препятствующие достижению требуемого технического результата, состоят в регистрации в любом временном (пространственном) канале всего одного фотона. Благодаря этому упрощается структура лидара и уменьшается потребляемая им мощность. Исключение же возможности регистрации во временном канале более одного фотона, естественно, приводит к росту погрешности измерения с увеличением концентрации вредных примесей в атмосфере.
Из известных технических решений наиболее близким по технической сущности к заявляемому объекту является система с регистрацией временной информации (Витерби М., Адриани А. Система детектирования отдельных фотонов с регистрацией временной информации для применения в лидаре //Приборы для научных исследований. 1987, N10, с. 46-52), содержащая ФЭУ, усилитель, амплитудный дискриминатор (АД), формирователь импульсов (ФИ), первый и второй ГТИ, датчик режима работы, коммутатор, счетчик, хронометр, ОЗУ, адресный счетчик, генератор импульса сброса и блок команд записи, линию задержки (ЛЗ), переключатель, буферное запоминающее устройство (БЗУ) и ЭВМ.
Выход ФЭУ через усилитель и АД подключен к ФИ, выход которого соединен со счетными входами коммутатора и блока команд записи, а также со вторым выходом переключателя, первый вход которого соединен с выходом второго ГТИ. Первый выход коммутатора через счетчик соединен с первым входом ОЗУ, выход которого через БЗУ подключен к ЭВМ. Второй выход коммутатора через хронометр соединен с вторым входом ОЗУ, третий вход которого подключен к выходу блока команд записи, а четвертый - к выходу адресного счетчика, вход которого соединен с выходом генератора импульсов сброса. Выход переключателя подключен к управляющему входу адресного счетчика и через линию задержки - к управляющему входу БЗУ. Выход первого ГТИ соединен с управляющими входами блока команд записи, хронометра, счетчика и ФИ. На вход датчика режима работы заводится синхроимпульс, а выход датчика объединен с управляющими входами коммутатора, генератора импульсов сброса и переключателя.
Работает известное устройство следующим образом (Витерби М., Адриани А. Система детектирования отдельных фотонов с регистрацией временной информации для применения в лидаре //Приборы для научных исследований. 1987, N10, c. 46-52, рис.1).
Одноэлектронные импульсы (ОИ) от ФЭУ после усиления передаются в АД. Сбор данных запускается синхроимпульсом, соответствующим моменту излучения лазера. Вся работа устройства с режиме сбора данных синхронизируется тактовыми сигналами кварцевого первого ГТИ.
В режиме сбора данных поступающие с АД импульсы повторно формируются в ФИ для доведения их длительности до одного тактового периода. Счетчик начинает счет тактовых импульсов. Импульс от следующего фотона останавливает счет и разрешает работу хронометра. После прекращения счета содержимое хронометра заносится в ОЗУ, а затем обнуляется. Информация заносится по адресу, задаваемому адресным счетчиком, по получении команды записи. Адрес увеличивается на единицу при поступлении каждого ОИ.
По окончании режима сбора начинается режим передачи данных. Работа системы в режиме передачи синхронизируется вторым ГТИ. В режиме передачи ОИ не пропускаются на входы счетчика и хронометра. Адресный счетчик сбрасывается и начинает счет тактовых импульсов второго ГТИ.
Каждый тактовый импульс второго ГТИ вызывает обращение к соответствующему адресу ОЗУ и после задержки содержимое адреса ОЗУ фиксируется в БЗУ и выводится в ЭВМ. После фиксации слова в БЗУ содержимое соответствующей ячейки ОЗУ очищается.
Признаки прототипа, совпадающие с признаками заявляемого технического решения, следующие: усилитель, АД, счетчик, адресный счетчик, ФИ, БЗУ и ЭВМ.
Недостатками известного устройства являются:
- невысокая помехозащищенность (устойчивость к фоновому излучению). Применение ФЭУ позволяет получить интегральную оценку об оптико-физических свойствах атмосферы, поскольку выходной сигнал фотоприемника (поток ОИ) определяется засветкой всего фотокатода, на который проецируется изображение значительного участка пространства;
- высокая избыточность получаемой информации. Из всей собранной информации полезными в ряде случаев являются лишь данные о координатах неоднородности оптико-физических свойств атмосферы и уровне принятого сигнала, отражаемого от этой неоднородности;
- большие временные затраты для предварительной обработки данных перед проведением анализа.
Причины, препятствующие достижению требуемого технического результата, заключаются в следующем. В атмосфере выделяются ряд одинаковых слоев, число и толщина которых задаются заранее. Измерение относительной доли фотонов, претерпевших упругое обратное рассеяние на аэрозольных частицах и молекулах атмосферных газов, дает информацию об оптико-физических параметрах атмосферы: содержание аэрозолей в атмосфере, концентрация молекул и температурный профиль. Описанная система подсчитывает общее количество рассеянных обратно фотонов во всех исследуемых слоях в счетчике и формирует в хронометре массив данных об интервалах времени между моментами появления фотонов в исследуемых слоях. Хронометр обеспечивает занесение в ОЗУ выделенных АД событий, зарегистрированных в течение времени измерения. При этом, число заполненных адресов представляет количество зарегистрированных фотонов, а содержание адресов дает информацию о временном распределении эхо-сигналов лидара. Обработка же полученных данных производится в ЭВМ программным способом.
При измерении интервалов между импульсами для двух соседних фотонов важно, чтобы ошибки были минимальны. Поэтому необходимо иметь возможность обрабатывать импульсы с ФИ, поступающие с частотой до 100 МГц. В реальных условиях работа системы синхронизируется тактовым сигналом первого ГТИ с частотой 75 МГц. При этом максимальная скорость счета хронометром достигает 25 МГц. При проведении измерений с высоким разрешением получаются большие объемы данных, поступающих с высокими скоростями.
Заметим, что в режиме передачи данных в ЭВМ применяется второй ГТИ с частотой следования импульсов, обеспечивающей прямой доступ к памяти ЭВМ. В реальной системе эта частота составляет 200 кГц и обеспечивает передачу 4096 слов.
Таким образом, для минимизации погрешностей измерений емкость ОЗУ должна быть велика, предполагая тем самым значительные временные затраты для считывания информации в ЭВМ.
Задача, на решение которой направлено изобретение, заключается в повышении пространственного разрешения пограничного слоя атмосферы при снижении избыточности собираемой информации на этапе предварительной обработки данных.
Технический результат, достигаемый при осуществлении изобретения, позволяет перейти к более мелкомасштабным исследованиям пограничного слоя атмосферы. В частности, тот же участок атмосферы, что и в прототипе, может быть спроектирован на фотокатод диссектора и затем дискретно просмотрен элементом разложения (определяющим пространственное разрешение). Благодаря чему удается в 1000 и более раз повысить пространственное разрешение системы.
Реализация в изобретении пространственно-временного алгоритма поиска пограничного слоя атмосферы позволяет анализировать и накапливать данные о "подозрительном" подслое, в котором произошла регистрация хотя бы одного фотона. Это резко сокращает объем данных, обрабатываемых в устройстве и передаваемых в ЭВМ. Емкость ОЗУ может быть сокращена минимум в Nп раз, где Nп - количество анализируемых подслоев атмосферы.
Помимо этого избыточность получаемой информации невелика, поскольку весь пространственно-временной поиск ориентирован на сбор данных только о нижней границе аномалий в атмосфере.
Технический результат достигается тем, что в устройство лазерного зондирования атмосферы, содержащее последовательно соединенные усилитель, амплитудный дискриминатор и формирователь импульсов, а также счетчик, адресный счетчик и БЗУ, выход которого подключен к ЭВМ, введены лазерный передатчик, диссектор с фокусирующе-отклоняющей системой (ФОС) и блоком стробирования питания, блок управления (БУ), блок развертки, счетчик циклов, пороговое устройство, схема совпадения, датчик адреса, одновибратор, элемент НЕ и шесть элементов И, причем вход лазерного передатчика соединен с выходом первого элемента И, на первый вход которого заведен сигнал разрешения запуска лазера, первый выход БУ объединен с вторыми входами первого и шестого элементов И и первым входом БЗУ, второй вход которого объединен с выходом датчика адреса и вторым входом схемы совпадения, первый вход которой подключен к выходу адресного счетчика, вход которого объединен с третьим входом БУ и вторым входом пятого элемента И, выход которого соединен со счетным входом датчика адреса, управляющий вход которого объединен с управляющими входами порогового устройства, счетчика и выходом счетчика циклов, вход которого подключен к выходу третьего элемента И, первый вход которого объединен с выходом ФИ и через элемент НЕ - с первыми входами пятого и шестого элементов И, второй выход БУ подключен к первому входу второго элемента И, выход которого соединен с блоком стробирования питания диссектора, вход ФИ подключен к первому входу четвертого элемента И, выход которого соединен со счетным входом счетчика, выход которого объединен с четвертым входом БЗУ и счетным входом порогового устройства, выход которого объединен с третьим входом БЗУ и входом одновибратора, инвертирующий выход которого подключен к второму входу второго элемента И, выход схемы совпадения объединен с вторыми входами третьего и четвертого элементов И, выход шестого элемента И подключен к входу блока развертки, выход которого соединен с ФОС диссектора, выход которого подключен к усилителю.
Анализ существующих признаков прототипа и заявляемого объекта выявил следующие новые существенные признаки для заявляемого объекта:
- диссектор с ФОС и блоком развертки, выход которого соединен с ФОС; благодаря этому удается производить пространственный (угловой) просмотр атмосферы без изменения углового положения как приемной, так и передающей аппаратуры: при этом применение диссектора позволяет по сравнению с ФЭУ на несколько порядков уменьшить уровень шумов, повысив отношение сигнал/шум;
БУ с тремя выходами; импульсы запуска лазерного передатчика формируются на первом выходе БУ; на втором выходе БУ с задержкой t0 относительно момента генерации зондирующего импульса формируется видеосигнал прямоугольной формы с длительностью NпTт.и, определяющей время приема рассеянного излучения от анализируемого слоя атмосферы; где Nп - количество подслоев внутри анализируемого слоя атмосферы, а Tт.и - период следования тактовых импульсов; на третьем выходе БУ формируется серия тактовых импульсов, соответствующих временным меткам начала и конца подслоев;
- блок стробирования питания диссектора, что обеспечивает чувствительность диссектора к потоку фотонов только в определенный временной интервал, соответствующий приему обратного рассеяния лазерного излучения от заданного слоя атмосферы:
- выход ФИ соединен через элемент НЕ с первым входом пятого элемента И, второй вход которого подключен к третьему выходу БУ, а выход подключен к счетному входу датчика адреса; благодаря этому при регистрации первого ОИ формирователь генерирует импульс длительностью (Nц-1)Tсл, где Nц - число циклов проверки выявленного подслоя атмосферы, Tсл - период следования импульсов зондирования лазера; сформированный сигнал запрещает поступление импульсов с третьего выхода БУ на счетный вход датчика адреса, в котором на время проверок фиксируется номер анализируемого подслоя атмосферы;
- элемент НЕ, вход которого подключен к ФИ, а выход - к первому входу шестого элемента И, второй вход которого соединен с первым выходом БУ, а выход подключен к входу блока развертки; это исключает перевод диссектора к обзору нового пространственного элемента разрешения при регистрации ОИ в анализируемом слое атмосферы;
- схема сравнения и четвертый элемент И обеспечивают подсчет ОИ в течение Nц циклов проверок только во временном интервале, соответствующем анализируемому подслою атмосферы;
- третий элемент И и счетчик циклов; появление импульса на выходе счетчика циклов проверок сигнализирует об окончании заданного количества Nц циклов проверок анализируемого подслоя атмосферы;
- пороговое устройство позволяет вынести решение о наличии аномалий в оптико-физических свойствах атмосферы и тем самым сократить объем передаваемой в ЭВМ информации;
- одновибратор и второй элемент И позволяют при обнаружении аномалии в оптико-физических свойствах атмосферы в i-ом подслое исключить анализ в остальных (i+1)... Nп подслоях.
Теоретическое доказательство наличия причинно-следственной связи совокупности заявляемых существенных признаков с указанным техническим результатом заключается в следующем.
В основу изобретения положен пространственно-временной поиск границы неоднородности атмосферы, который основан на том, что согласно фиг.4 каждой высоте соответствует ряд точек во временной области, располагающихся с периодичностью Tсл, равной периоду следования зондирующих импульсов лазерного передатчика. В течение времени t∈[T0,T0+T] фиксируется подслой k, в котором произошла регистрация хотя бы одного ОИ. По временной оси k-му подслою соответствует временной интервал.
[T0 + (k-1)•Tт.и, T0 + k•Tт.и].
Анализ выделенного k-го подслоя (и только его) производится в последующие циклы, количеством Nц - 1. Следовательно, решение об обнаружении границы неоднородности производится на основании подсчета количества ОИ за Nц циклов.
Регистрация N ≥ 1 ОИ в момент обзора k-го подслоя во временном интервале [T0 + (k-1)•Tт.и, Т0 + k•Тт.и] переводит систему в ждущий режим, при котором канал не реагирует на поток ОИ в течение временного интервала [T0 + k•Tт.и, T0 + (k-1)•Tт.и + Tсл.].
Пусть во время j-го цикла проверок k-го подслоя зафиксировано Nj, j=2, Nц импульсов. Суммарное число ОИ за все циклы проверок k-го подслоя
со счетчика 13 (фиг.1) сравнивается с пороговым уровнем Nпор в пороговом устройстве 16.
При выполнении условия
NОИ > Nпор
выносится решение о наличии неоднородности в анализируемом подслое атмосферы.
В дальнейшем будем полагать, что каждый фотоэлектрон полезного и фонового излучений вызывает превышение уровня дискриминации, выбор оптимальной величины которого обеспечивает полную дискриминацию ОИ темнового тока. Последнее предположение может быть снято посредством увеличения интенсивности потока фотоэлектронов фонового излучения на среднюю скорость поступления импульсов темнового тока с выхода АД 7.
Определим вероятность ложных срабатываний при обследовании 1-го подслоя атмосферы (k=1)
где
P{ n=Nф, k=1} - вероятность, определяющая возможность зарегистрировать в первом подслое ровно Nф фоновых ОИ во временном интервале [T0, T0+Tт.и]; P{n > Nпор-Nф, j=  вероятность, характеризующая возможность зарегистрировать в течение последующих Nц-1 проверок не менее Nпор - N0+1 фоновых ОИ для срабатывания порогового устройства 16. Наконец, первое слагаемое - вероятность P{ n > Nпор, k=1} - определяет возможность принятия ложного решения вне зависимости от итогов последующих проверок.
вероятность, характеризующая возможность зарегистрировать в течение последующих Nц-1 проверок не менее Nпор - N0+1 фоновых ОИ для срабатывания порогового устройства 16. Наконец, первое слагаемое - вероятность P{ n > Nпор, k=1} - определяет возможность принятия ложного решения вне зависимости от итогов последующих проверок.
В случае пуассоновского потока ОИ фонового излучения с интенсивностью Sф выражение (1) преобразуется к виду (2)
(2) - среднее количество фоновых ОИ, принимаемых за время одной проверки подслоя;
- среднее количество фоновых ОИ, принимаемых за время одной проверки подслоя; - среднее количество фоновых ОИ, регистрируемых за последующие (Nц-1) проверки подслоя.
- среднее количество фоновых ОИ, регистрируемых за последующие (Nц-1) проверки подслоя.
Вероятность принятия ложного решения о наличии неоднородности во втором подслое
преобразуем к виду
PЛТ{k=2} = (1-Pп)•Pп
Используя метод математической индукции, легко доказать, что в общем случае вероятность принятия ложного решения о неоднородности в k-м подслое равна:
PЛТ{k} = (1-Pп)k-1•Pп
Откуда результирующая вероятность ложной тревоги
Поскольку на практике необходимо, чтобы Pп << 1, то
(1 - Pп)Nп ≈ 1 - Nп • Pп
Откуда
PЛТ = Nп•Pп (4)
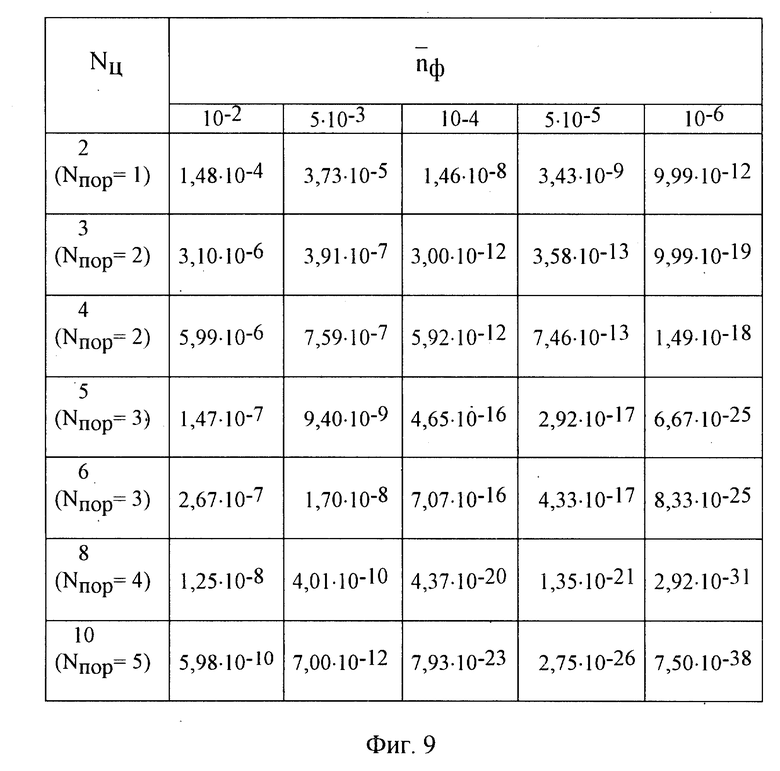
В таблице на фиг. 9 приведены значения вероятности Pп, рассчитанные по формуле (2).
Для описанного алгоритма пространственно-временного поиска границы неоднородности при приеме фонового излучения среднее время наблюдения пространственного (временного) элемента разложения может быть оценено по приближенной формуле
Для пуассоновского потока ОИ
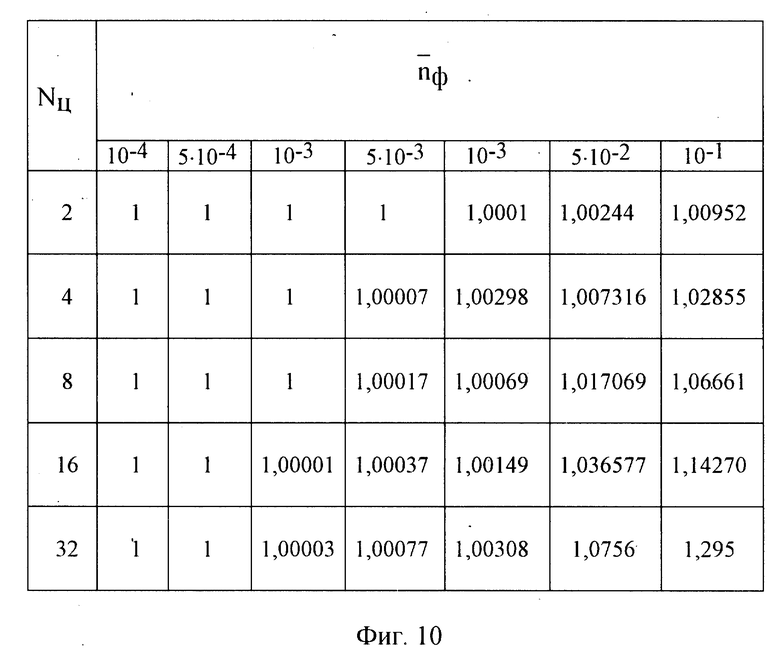
Результаты расчета по формуле (5) сведены в таблицу на фиг.10.
При  << 1 имеем
<< 1 имеем
Расчеты показывают правомочность использования приближенной формулы (6).
Пусть в обследуемом пространстве неоднородность присутствует в K-м подслое. Условная вероятность правильного обнаружения неоднородности
где
P{n=N, k} - вероятность, определяющая возможность зарегистрировать в K-м подслое ровно N сигнальных и фоновых ОИ во временном интервале
[T0 + (k-1)Tт.и., T0 + kTт.и]
Полагая распределение чисел ОИ, обязанных приему полезного излучения, подчиненным закону Пуассона со средним числом ОИ nс за длительность светового импульса, находим

 - количество ОИ, зарегистрированных за последующие (Nц-1) проверки подслоя.
- количество ОИ, зарегистрированных за последующие (Nц-1) проверки подслоя.
Обозначим выражение в  скобках
скобках
Тогда
Pобн{K} = (1-Pп)K-1•Pсф.
Вероятность правильного обнаружения неоднородности находится усреднением Pобн{K} по закону распределения p(K) появления сигнала в K-м подслое
При равномерном распределении случайной величины k имеем
Заметим, что при условии Nп•Pп<<1 справедливы предположения
Pобн ≈ Pсф
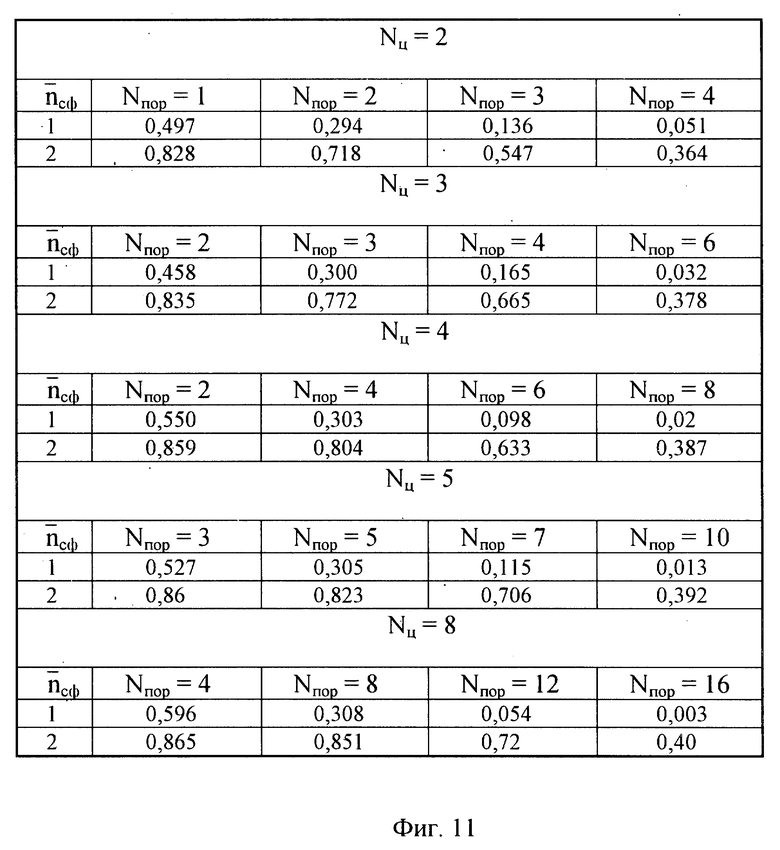
На фиг. 11 представлены результаты расчета вероятности правильного обнаруживания Pсф в элементе разложения по формуле (9).
Сущность предлагаемого технического решения поясняется чертежами.
На фиг. 1 представлена структурная схема устройства лазерного зондирования атмосферы.
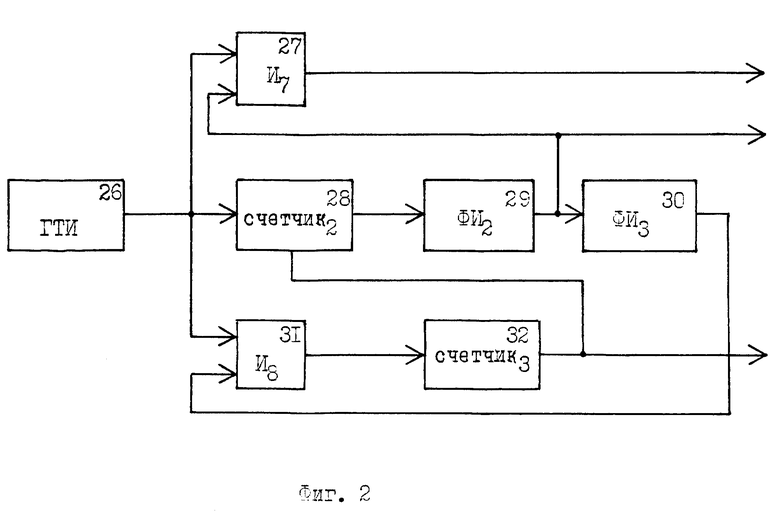
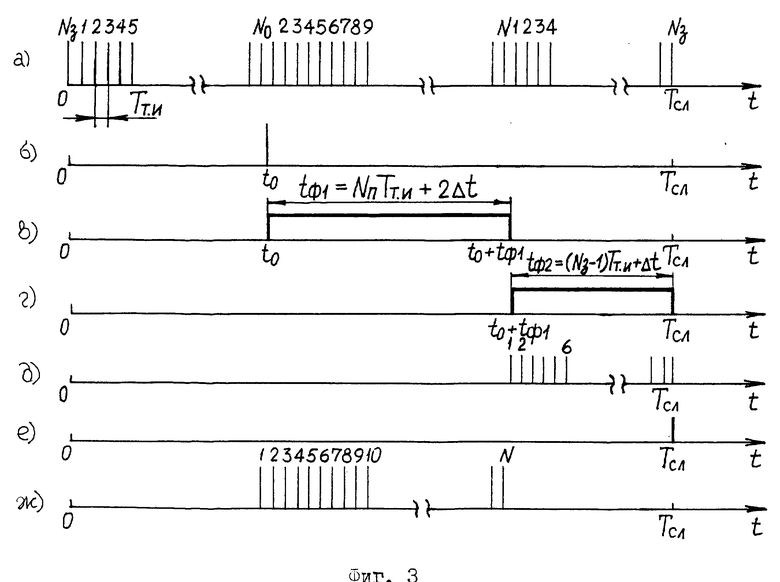
Вариант структурной схемы БУ показан на фиг. 2, а эпюры, поясняющие ее работу - на фиг. 3. Эпюры напряжений показаны на выходах ГТИ 26 (а), счетчики 28 (б), ФИ 29 (в), ФИ 30 (г), элемента И 31 (д), счетчика 32 (е) и элемента И 27 (ж).
На фиг. 4 представлен высотный профиль атмосферы (а) и сопоставимая ей временная функция регистрации рассеянного назад эхо-сигнала (б).
Конструкция диссектора представлена на фиг. 5, где ФК - фотокатод, УК - ускоряющее кольцо, ФОС - фокусирующе-отклоняющая система, Д - диафрагма, ВЭУ - вторично-электронный умножитель, К - коллектор.
Стратегия пространственно-временного поиска показана на фиг. 6. Диссектор осуществляет последовательное дискретное сканирования контролируемого кадра размером l x r строками, а строки элементами разложения размером a x b.
На фиг. 7 представлены эпюры напряжений в устройстве для случая отсутствия аномалий в анализируемом пространственном элементе разложения. Эпюры показаны в наиболее характерных точках схемы: первый (а), второй (б) и третий (в) выходы БУ 3, выходы адресного счетчика 17 (г), датчика 23 адреса (д), схемы 18 совпадения (е) и шестого элемента И 22 (ж).
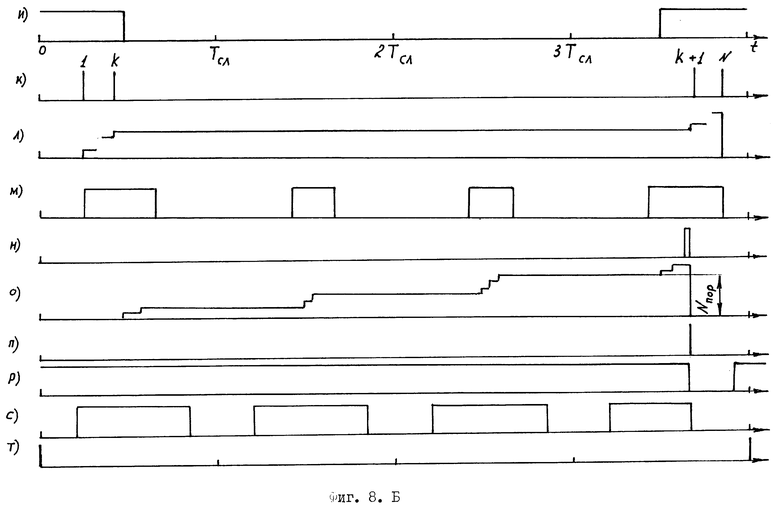
На фиг. 8 представлены эпюры напряжений в устройстве для ситуации, при которой аномалия присутствует в k-м подслое атмосферы, т.е. ОИ принят во временном интервале между k-м и (k+1)-м тактовыми импульсами с третьего выхода БУ 3. Эпюры показаны на первом (а), втором (б) и третьем (в) выходах БУ 3, а также на выходах АД 7 (г), ФИ 6 (д), четвертого элемента И 12 (е), третьего элемента И 11 (ж), адресного счетчика 17 (з), датчика 23 адреса (л), схемы 18 совпадения (м), счетчика 15 циклов (н), счетчика 13 (о), порогового устройства 16 (п), одновибратора 19 (р), второго элемента И 4 (с) и шестого элемента И 22 (т).
На фиг. 9 в таблицу сведены значения вероятности Pп ложных срабатываний при обследовании первого подслоя атмосферы, рассчитанные для ряда значений среднего количества фоновых ОИ  принимаемых за время одной проверки подслоя. Результаты расчета среднего времени наблюдения пространственного (углового) элемента разложения сведены в таблицу на фиг. 10.
принимаемых за время одной проверки подслоя. Результаты расчета среднего времени наблюдения пространственного (углового) элемента разложения сведены в таблицу на фиг. 10.
На фиг. 11 представлены зависимости вероятности правильного обнаружения Pсф в элементе разложения устройства от среднего числа принимаемых ОИ сигнала и фона  для числа циклов проверки Nц равном 4 (а), 8 (б), 16 (в) и 32 (г).
для числа циклов проверки Nц равном 4 (а), 8 (б), 16 (в) и 32 (г).
Устройство содержит (см. фиг. 1) первый элемент И 1, лазерный передатчик 2, БУ 3, второй элемент И 4, блок 5 стробирования, ФИ 6, АД 7, усилитель 8, диссектор 9 с ФОС 10, третий 11 и четвертый 12 элементы И, счетчик 13, блок 14 развертки, счетчик 15 циклов, пороговое устройство 16, адресный счетчик 17, схему 18 совпадения, одновибратор 19, элемент НЕ 20, пятый 21 и шестой 22 элементы И, датчик 23 адреса, БЗУ 24 и ЭВМ 25.
Сигнал разрешения запуска лазера подается на первый вход первого элемента И 1, выход которого подключен к лазерному передатчику 2. Первый выход БУ 3 объединен с вторыми входами первого 1 и шестого 22 элементов И и первым входом БЗУ 24, выход которого подключен к ЭВМ 25, второй выход БУ 3 подключен к первому входу второго элемента И 4, выход которого соединен с входом блока 5 стробирования питания диссектора 9 с ФОС 10. Третий выход БУ 3 объединен с входом адресного счетчика 17 и вторым входом пятого элемента И 21, первый вход которого объединен с первым входом шестого элемента И 22 и выходом элемента НЕ 20, вход которого подключен к выходу ФИ 6 и первому входу третьего элемента И 11, выход которого через счетчик циклов 15 подключен к управляющим входам счетчика 13, порогового устройства 16 и датчика 23 адреса, выход которого объединен с вторыми входами БЗУ 24 и схемы 18 совпадения. Выход диссектора 9 через усилитель 8 и АД 7 подключен к входу ФИ 6 и первому входу четвертого элемента И 12, выход которого соединен со счетным входом счетчика 13, выход которого объединен со счетным входом порогового устройства 16 и четвертым входом БЗУ 24, третий вход которого объединен с выходом порогового устройства 16 и входом одновибратора 19, инвертирующий выход которого соединен с вторым входом второго элемента И 4. Выход шестого элемента И 22 через блок 14 развертки подключен к ФОС 10 диссектора 9. Выход адресного счетчика 17 соединен с первым входом схемы 18 совпадения, выход которой объединен с вторыми входами третьего 11 и четвертого 12 элементов И. Выход пятого элемента И 21 подключен ко входу датчика 23 адреса.
БУ 3 содержит (см. фиг. 2) ГТИ 26, элемент И 27, счетчик 28, ФИ 29 и 30, элемент И 31 и счетчик 32. Выход ГТИ 26 объединен с первыми входами элементов И 27 и 31 и счетным входом счетчика 28, выход которого через ФИ 29 и 30 подключен к второму входу элемента И 31, выход которого через счетчик 32 соединен с управляющим входом счетчика 28 и является вторым выходом БУ. Выход элемента И 27 является третьим выходом БУ.
Принцип работы устройства основан на активном лазерном зондировании атмосферы, пространственно-временном поиске рассеянного атмосферного излучения и использовании диссектора.
Лазерный передатчик посылает импульсы и регистрирует рассеянное назад лазерное излучение в функции времени для формирования данных об оптико-физических параметрах атмосферы. Применение счетной аппаратуры позволяет при вертикальном зондировании анализировать атмосферу выше аэрозольного слоя (более 35 км).
Пусть предусматривается проанализировать слой атмосферы толщиной H на высоте H0 ... H0+H от поверхности Земли (фиг. 4, а). Если лазерный передатчик излучает импульсы с периодом следования Tсл, то временной интервал T0 .. . T0+T будет соответствовать приему эхо-сигнала от анализируемого слоя (фиг. 4, б). Здесь T0=2H0/c соответствует моменту начала анализа нижней границе слоя, T = 2H/c - временному интервалу анализа выделенного слоя, c = 3•108 м/с - скорость света. Выбор величины периода Tсл обычно должен удовлетворять условию
Hв=cTсл/2>H0+H
При этом Hз=Hв-(H0+H) представляет толщину некоторого защитного слоя атмосферы.
Для повышения точности определения высотных координат аномалии оптико-физических свойств атмосферы анализируемый слой разбивается на Nп подслоев толщиной h. На временной оси (фиг. 4, б) анализу обратного рассеяния с подслоя соответствует временной интервал длительностью Tт.и=2h/c.
Обеспечение необходимой временной привязки к высотному профилю атмосферы осуществляется БУ 3 (фиг. 1), вариант структурной схемы которого представлен на фиг. 2.
Генератор 26 формирует непрерывную последовательность тактовых импульсов с частотой следования fт.и=1/Tт.и (фиг. 3, а). Работа счетчика 28 начинается с момента появления на первом выходе БУ импульса запуска лазера (фиг. 3, е). После подсчета первых N0 тактовых импульсов содержание счетчика 28 обнуляется, одновременно генерируя импульс (фиг. 3, б) и запускающий ФИ 29 и формирующий сигнал временного окна (фиг. 3, в) длительностью
tф1 = NпTт.и + 2Δt.
Задним фронтом импульса с ФИ 29 запускается ФИ 30, формирующий импульс (фиг. 3, г) длительностью
tф2 = (N3-1)Tт.и + Δt.
Начинается счет тактовых импульсов с ГТИ 26 счетчиком 32, который заканчивается при подсчете Nз импульсов (фиг. 3, д).
Момент генерации зондирующего излучения задается появлением импульса на первом выходе БУ (фиг. 3, е). Серия их N импульсов на третьем выходе БУ (фиг. 3, ж) определяет границы Nп подслоев. Для упрощения конструкции адресного счетчика 17 (см. фиг. 1) выбор количества подслоев Nп = N - 1 должен удовлетворять условию
Nп = 2k - 1
где
k - целое число.
На втором выходе БУ формируется прямоугольный импульс длительностью tф1 = NпTт.и + 2Δt (фиг. 3, в). Начало импульса на Δt опережает момент появления первого, а окончание импульса на Δt запаздывает относительно N-го тактового импульса на третьем выходе БУ (фиг. 3, ж). Величина Δt выбирается из условия завершения переходного процесса к моменту прихода тактового импульса. Обычно
Δt < Tт.и/2.
Формируемый на втором выходе БУ импульс (см. фиг. 3, в) определяет временное окно, в течение которого необходимо осуществлять прием эхо-сигналов.
Диссектор - передающая телевизионная трубка мгновенного действия без накопления заряда - является почти идеальным прибором для работы в системах пространственного поиска. Работа диссектора (фиг. 5) основана на отклонении электронного потока, образованного фотоэлектронами, число которых в каждой точке фотокатода (ФК) пропорционально потоку фотонов в этих точках. Электронный поток фокусируется ФОС и, проходя через ускоряющее кольцо (УК), отклоняется (сканируется) относительно диафрагмы (Д) с вырезающим отверстием, в которое в каждый момент времени попадает некоторое число фотоэлектронов, несущих информацию об изображении с определенного участка фотокатода. Фотоэлектроны, прошедшие через вырезающее отверстие (апертуру), умножаются во вторично-электронном умножителе (ВЭУ) и поступают на нагрузочное сопротивление Rн коллектора (К), образуя поток ОИ.
Вариант стратегии пространственного сканирования спроектированного на фотокатод диссектора пространства, показан на фиг. 6. Диссектор осуществляет последовательное дискретное сканирование контролируемого кадра (пространства) размером l x r строками, а строки - элементами разложения размером a x b. Форма и размеры апертуры диафрагмы определяют требуемую форму и размеры мгновенного поля зрения элемента разложения, а размеры рабочей области фотокатода - угол поля зрения системы поиска.
Работает устройство лазерного зондирования атмосферы следующим образом.
Отсутствие сигнала разрешения запуска лазера на первом входе элемента И 1 (фиг. 1) позволяет испытать всю электронную часть схемы, блокировав запуск лазерного передатчика 2. Подача на первый вход первого элемента И 1 извне сигнала разрешения обеспечивает передачу сигнала с первого выхода БУ 3 на лазерный передатчик 2 и генерацию им зондирующего импульса.
Пусть в момент времени t = 0 сгенерирован зондирующий импульс (фиг. 7, а). Во временном интервале [0, T0] на выходе второго элемента И 4 действует напряжение низкого уровня (логического нуля). Блок 5 стробирования устанавливает напряжение питания диссектора 9 такой величины, что фотоприемник нечувствителен к принимаемому потоку фотонов. При появлении на втором выходе БУ 3 в момент t = T0 импульса временного окна (фиг. 7, б) блок 5 стробирования переводит диссектор 9 в нормальное рабочее состояние посредством подачи необходимого напряжения питания на диссектор 9 (фиг. 7, б).
Проанализируем работу устройства лазерного зондирования атмосферы для случая отсутствия аномалий в анализируемом пространственном элементе разложения (фиг. 7), т.е. в предположении, что в анализируемый временной интервал [T0, T0+T] не зарегистрировано ни одного ОИ.
Ввиду отсутствия ОИ выходное напряжение ФИ 6 соответствует уровню логического нуля, на первых входах пятого 21 и шестого 22 элементов И действует напряжение логической единицы. Появление тактового импульса (фиг. 7, в) с третьего выхода БУ 3 синхронно изменяет на единицу состояние адресного счетчика 17 (фиг. 7, г) и датчика 23 адреса (фиг. 7, д). При равенстве кодовых комбинаций адресного счетчика 17 и датчика 23 адреса на выходе схемы 18 совпадения появляется напряжение логической единицы. Таким образом, в рассматриваемом случае во всем временном интервале [T0, T0+T] на выходе схемы 18 совпадения действует напряжение высокого уровня (фиг. 7, е). Несмотря на воздействие на второй вход четвертого элемента И 12 напряжения высокого уровня, ввиду отсутствия приема фотонов, накопления ОИ в счетчике 13 не происходит (Nои = 0). Как следствие этого, команды на запись информации в БЗУ 24 с порогового устройства 16 не поступает.
В момент поступления последнего N = 2k тактового импульса с третьего выхода БУ 3 (фиг. 7, в) происходит самообнуление счетчика 17 адреса и датчика 23 адреса.
Во временном интервале [T0+T, Tсл] диссектор 9 нечувствителен к потоку фотонов, что, естественно, не изменяет состояния узлов устройства. В момент t = Tсл на первом выходе БУ 3 появляется импульс (фиг. 7, а), который формирует новый зондирующий сигнал. Одновременно, через шестой элемент И 22 этот импульс поступает на блок 14 развертки (фиг. 7, ж), переводя устройство к анализу нового углового элемента разложения (съем информации с нового участка фотокатода диссектора).
Теперь рассмотрим ситуацию, при которой во время просмотра k-го подслоя (во временной интервал между k-м и (k+1)-м тактовыми импульсами с третьего выхода БУ 3) принят ОИ.
В момент регистрации АД 7 (фиг. 1) первого ОИ (фиг. 8, г) срабатывает ФИ 6, генерирующий импульс длительностью (Nц-1)Tсл, где Nц - число циклов проверки (накопления ОИ). Срабатывание ФИ 6 переводит устройство в режим проверки (накопления ОИ). Срабатывание ФИ 6 переводит устройство в режим проверки для приема решения о наличии неоднородности в k-м подслое атмосферы. В этом режиме система подсчитывает количество ОИ Nои счетчиком (фиг. 8, о), принятых с k-го подслоя атмосферы за четыре цикла проверки (Nц = 4), и сравнивает его с пороговым уровнем порогового устройства 16 (Nпор = 7). При выполнении условия Nои>Nпор в момент прихода (k+1)-го тактового импульса (во время последнего цикла проверки) пороговое устройство 16 генерирует импульс (фиг. 8, г), который, воздействуя на третий вход БЗУ 24, обеспечивает запись в него информации с выходов датчика 23 адреса (номер подслоя) и счетчика 13 (количество ОИ).
Проанализируем более подробно режим накопления. К моменту начала анализа k-го подслоя адресный счетчик 17 (фиг. 8, з), и датчик 23 адреса (фиг. 8, л) работают синхронно и на выходе схемы 18 совпадения поддерживается напряжение высокого уровня (фиг. 8, м). Прием первого ОИ приводит к появлению напряжения логической единицы на выходе третьего элемента И 11 (фиг. 8, ж).
В момент прихода (k+1)-го тактового импульса с третьего выхода БУ 3 (фиг. 8, в) состояние адресного счетчика 17 изменяется на единицу (фиг. 8, з). Состояние же датчика 23 адреса (фиг. 8, л) зафиксировано на k-м уровне до момента окончания импульса с ФИ 6 (фиг. 8, д). В оставшиеся (Nц-1) циклов проверки на выходе третьего элемента И 11 (фиг. 8, ж) появляются сигналы с длительностью Tт.и во временные интервалы между k-м и (k+1)-м тактовыми импульсами, когда кодовые комбинации адресного счетчика 17 (фиг. 8, з) и датчика 23 адреса (фиг. 8, л) совпадают.
В момент принятия решения о наличии неоднородности в анализируемом подслое импульс с выхода порогового устройства 16 (фиг. 8, п) запускает одновибратор 19, который генерирует импульс длительностью Tз ≥ T(Hз ≥ H). После инверсии этот импульс, воздействуя на второй вход второго элемента И 4, делает нечувствительным диссектор 9 к потоку фотонов до момента T0 + Nц•Tсл.
В момент t = Nц•Tсл очередной запускающий импульс с первого выхода БУ 3 (фиг. 8, а) через шестой элемент И 22 поступает на вход блока 14 развертки, обеспечивая переход устройства к анализу углового (пространственного) элемента разложения. Применение цифровой техники при построении блока 14 развертки позволяет добиться высокой стабильности и точности.
Функциональные элементы устройства лазерного зондирования атмосферы удовлетворяют критерию промышленного применения, так как могут быть выполнены, например, с использованием следующих компонентов.
Отечественный диссектор ЛИ 610 специально разработан для применения в режиме счета фотонов. Эффективность счета фотонов здесь достигает 80 - 90%. Полоса пропускания прибора достигает 50 МГц.
Из диссекторов с высокими временными параметрами можно привести F4077 и F4087 фирмы ITT с полосой пропускания 745 МГц.
Описание конкретных схем блоков стробирования питания ФЭУ и диссекторов дается в статьях журнала "Приборы и техника эксперимента (ПТЭ)". Так, применение биполярных управляющих сигналов позволяет за время 100 нс изменить коэффициент умножения диссектора на два порядка. (ПТЭ. 1977, N 2, с. 174 - 175 или ПТЭ. 1975, N 3, c. 196 - 198).
Схема стробирования, описанная в [ПТЭ. 1978, N 1, с. 163 - 164] основана на переключении двух соседних динодов из встречного включения в нормальное. Описанная в [ПТЭ. 1983, N 11, с. 1473] схема обеспечивала изменение усиления ФЭУ в 10.000 раз при времени запирания 20 нс и времени отпирания 50 нс.
Реализацию блока развертки в цифровой форме можно найти в [ПТЭ. 1981, N 2, с. 135 - 136].
Буферное запоминающее устройство 24, датчик 23 адреса, адресный счетчик 17, счетчик 13, АД 7 могут быть реализованы с учетом рекомендаций и конкретных схем, приведенных в [Приборы для научных исследований. 1987, N 10, с. 46 - 52].
Пусть, как и в прототипе, Tп.и = 50 нс и Nп = 63 (N = 64 = 2k). Высота подслоя при вертикальном зондировании (фиг. 4) h = c Tт.и/2 = 7,5 м, а высота слоя H = Nп h = 472,5 м. Выбор N0 = 212 = 4096 гарантирует высоту H0 = (N0 + 1)h = 30727,5 м. Исходя из условия Nз≥ N, выбираем Nз = N = 64 = 26 и Hз = Nз h = 470 м. Таким образом, Hв = H0 + H + Hз = 31670 м.
При угле расхождения лазерного передатчика Θпер = = 5,0 мрад (лидар CEDAR, США) на высоте Hср = 31 км облучается круг радиусом R = ΘперHср/2 = 77,5 м.
Предположим, что приемная антенна (телескоп) имеет диаметр Dпр = 0,5 м (лидар CEDAR, имеет Dпр = 1,22 м). Дифракционный предел угла зрения приемной оптики Θпред = 1,03λс/Dпр, для эксимерного лазера (XeCl) с длиной волны излучения λс = 500 нм составляет Θпред = 1,03 мкрад. Этому углу на высоте Hср = 31 км будет соответствовать пятно с радиусом R = Θпер• Hср/2 = 16 мм. Следовательно, приемная оптика, обычно применяемая в лидарных системах, позволяет потенциально осуществить съем информации о параметрах атмосферы с пространственного (углового) элемента разложения, составляющего лишь часть облучаемого пространства.
Применение в изобретении диссектора позволяет использовать потенциальные возможности приемной оптики. Например, для диссектора ЛИ 610, предназначенного для работы в режиме счета фотонов, неравномерность чувствительности фотокатода в центральной части диссектора радиусом 5 мм не превышает 10%. Обследуемый участок пространства проецируется в кадр на фотокатод квадратной формы со стороной l = 6,4 мм. Квадратная апертура диафрагмы диссектора ЛИ 610 со стороной d = 200 мкм определяет элемент разложения, которым сканируется кадр. В пределах кадра обзор осуществляется построчно. Строка сканируется дискретно элементом разложения.
В рассматриваемом случае число строк в кадре zстр = 32, как и число элементов разложения в строке zэл = 32.
Пусть приемная оптика проецирует пространство в кадр с линейными углами β×β, где β = 4,8 мрад. Тогда угловые размеры элемента разложения α = β/zэл = 150 мкрад. Таким образом, использование изобретения с диссектором ЛИ 610 обеспечивает повышение пространственного разрешения устройства лазерного зондирования атмосферы в (β/α)2 = 1024 раз.
Каждый единичный фотоэлектрон генерирует заряд в q = G • e, который на аноде с емкостью C производит импульс напряжения
U = eG/C,
где
e = 1,6 • 10-19 Кл - заряд электрона;
G = 106 ... 108 - коэффициент умножения ВЭУ одноэлектронного диссектора.
При G = 106 и C = 15 пФ находим U = 10 мВ.
Эти импульсы с временным разрешением в 1 нс запускают быстродействующий АД 7, который формирует ТТЛ - нормированный импульс.
Вариант принципиальной схемы управления и обработки информации устройства лазерного зондирования атмосферы реализован на интегральных микросхемах (ИМС) серии К155 и К555 с ТТЛ - логикой и предназначен для считывания данных с АД 7, сравнения числа ОИ с пороговым уровнем, выдачи номера подслоя, содержащего неоднородность, и передачи собранной информации через БЗУ 24 в ЭВМ 25.
Схема составлена таким образом, чтобы удовлетворить следующим параметрам:
- число циклов проверки одного подслоя Nц = 4;
- максимальное число ОИ с АД 7 за 4 цикла полагаем равным 15. Поэтому для подсчета ОИ был выбран четырехразрядный счетчик 13. При возрастании максимального числа ОИ (например, при увеличении числа циклов проверки или изменении условий приема фотонов) возможно дополнительное каскадирование счетчиков;
- число подслоев Nп = 64, поэтому адресный счетчик 17 и датчик 23 адреса построены на основе сдвоенных четырехразрядных счетчиков. Схема совпадения адресов построена из двух каскадированных четырехразрядных компараторах.
Первый элемент И 1 (D1.1) и второй элемент И 4 (D1.2) собраны на ИМС К155ЛИ5 (D1). При замыкании ключа Кл1 на вход 1 элемента D1.1 подается напряжение +3 В высокого уровня, которое является сигналом разрешения запуска лазера. Вход 13 ИМС D1 соединен с инвертирующим выходом одновибратора 19 (выход 1 ИМС D7), собранного на ИМС К155АГ1. Длительность формируемого импульса τОВ≈ ≈ 0,7RC = 6,4 мкс задается RC-цепью, подключенной ко входам 10 и 11 ИМС D7.
Третий элемент И 11 (D2.1) и четвертый элемент И 12 (D2.2) собраны на ИМС К155ЛИ5 (D2). К входу 1 ИМС D2 подключен выход ФИ 6 (выход 6 ИМС D3). Входы 2 и 12 ИМС D2 соединены с выходом схемы 18 совпадения (выход 16 ИМС D13). Вход 13 ИМС D2 объединен с входом ФИ 6 (вход 5 ИМС D3) и выходом АД 7. Выход 5 ИМС D2 подключен к счетному входу счетчика 15 циклов на базе ИМС D4, а выход 10 ИМС D2 соединен со счетным входом счетчика 13 (вход 14 ИМС D5).
На ИМС К155АГ1 (D3) реализован ФИ 6, представляющий одновибратор без перезапуска с триггером Шмитта на входе. Внешние времязадающие элементы R = 10 кОм и C = 3 нФ подключены к входам 10 и 11 ИМС D3. При таком подключении длительность формируемого импульса τфи= 0,7RC = 19,2 мкс, что соответствует (Nц - 1)Tсл при Nц = 4 и Tсл = 6,4 мкс. Установка на входах ИМС D3 напряжения логического нуля обеспечивает запуск ФИ 6 положительным фронтом импульса на входе 5 ИМС.
Счетчик 15 циклов собран на ИМС К155ИЕ5 (D4), представляющей четырехразрядный асинхронный счетчик. Счетный вход 14 ИМС D4 подключен к выходу 5 ИМС D2 (третий элемент И 11). Для создания счетчика на 15 счетный вход 1 ИМС D4 соединен с выходом 12 (разрядным входом 20). При числе циклов проверок Nц = 4 разрядные входы 21 и 23 (выходы 9 и 11 ИМС D4) не задействованы. Разрядный вход 22 (выход 8 ИМС D4) объединен с входами 2 и 3 ИМС D5 (счетчик 13), входами 2 и 12 ИМС D10 (датчик адреса) и для обнуления с собственными входами 2 и 3.
Счетчик 13 собран на ИМС К155ИЕ5 (D5), представляющей четырехразрядный асинхронный счетчик, позволяющий за 4 цикла проверки подсчитывать до 15 ОИ. Для создания счетчика на 15 счетный вход 1 ИМС D5 подключен к выходу 12 (разрядный выход 20). Счетный вход 14 ИМС D5 подключен к выходу 10 ИМС D2 (четвертый элемент И 12). Входы 2 и 3 ИМС D5 сброса подключены к выходу 8 ИМС D4 (счетчик 15 циклов). Выходы 12, 9, 8 и 11 ИМС D5 (разрядные выходы 20, 21, 22, 23 соответственно) подключены к входу порогового устройства 16 (D6).
Пороговое устройство 16 реализовано на ИМС К155СП1 (D6), являющейся четырехразрядным компаратором двоичных кодов (D6). Из входов кода I задействован вход 3 ("X = Y"), при подаче логической единицы на который появляется напряжение высокого уровня на выходе 6 в момент равенства кодов X и Y. Входы 10 и 12 кода X объединены (разрядные входы 20 и 21) и на них подано напряжение +3 В высокого уровня, что устанавливает на входе порогового устройства 16 порог равный 3. На входы 9, 11, 14 и 1 кода Y ИМС D6 подаются напряжения с выходов 12, 9, 8 и 11 ИМС D5 (счетчик 13). Выходы 6 (X = Y) и 7 (X < Y) ИМС D6 соединены с входами 6 и 7 элемента ИЛИ, собранного на ИМС К155ЛЛ2 (D14), выход 5 которого подключен к входу одновибратора 19 (вход 5 ИМС D7).
Одновибратор 19 собран на ИМС К155АГ1 (D7), инвертирующий выход 1 которого подключен к второму входу второго И 4 (вход ИМС D1).
Элемент НЕ 20 собран на ИМС К155ЛН2, представляющей шесть элементов НЕ с открытым коллекторным входом (D8). На вход 5 подаются импульсы с ФИ 6 (D3), а выход 6 подключен к входам пятого элемента И 21 (D9.1) и шестого элемента И 22 (D9.2).
Пятый 21 и шестой 22 элементы И собраны на ИМС К155ЛИ5 (D9). Вход 1 соединен с третьим выходом БУ 3, входы 2 и 12 соединены с выходом 6 ИМС D8 (элемент НЕ 20). Вход 13 ИМС D9.2 соединен с первым выходом БУ 3. Выход 5 ИМС D9.1 подключен к счетному входу датчика 23 адреса, а выход 10 - к блоку 14 развертки.
Датчик 23 адреса собран на ИМС К155ИЕ19 (D10), представляющего два четырехразрядных асинхронных счетчика. Счетный вход 1 ИМС D10 подключен к выходу пятого элемента И 21 (D9). Второй счетный вход 13 ИМС D10 объединен с выходом 6 для создания одного счетчика на 128; входы 2 и 12 ИМС D10 ("сброс") подключены к выходу счетчика циклов 15 (D4). Выходы 3, 4, 5 и 6 ИМС D10 подключены соответственно к входам 10, 12, 13 и 15 схемы 18 совпадения (D11). Выходы 11, 10, 9 и 8 ИМС D10 подключены соответственно к входам 10, 12, 13 и 15 схемы 18 совпадения (D13).
Адресный счетчик 17 собран на ИМС К555ИЕ19 (D12). Счетный вход 1 подключен к третьему выходу БУ 3, второй счетный вход 13 объединен с выходом 6 для создания одного счетчика на 128. Входы 2 и 12 ("сброс") подключены к выходу 9 (26 = 64) этой же ИМС. Входы 3, 4, 5 и 6 ИМС D12 соединены с входами 9, 11, 14 и 1, соответственно схемы 18 совпадения (D11). Выходы 11, 10, 9, 8 ИМС D12 соединены соответственно со входами 9, 11, 14 и 1 схемы 18 совпадения (D13).
Схема 18 совпадения собрана на двух ИМС К555СП1 (D11 и D13), для организации сравнения двух чисел, каждое из которых не больше 64, т.е. нужно 7 разрядов вместо 4. Эти ИМС объединены в один восьмиразрядный компаратор, путем соединения выходов 5, 6 и 7 ИМС D11 с входами 4, 3 и 2 ИМС D13. Таким образом, младшие 4 разряда сравниваемых адресов подаются на ИМС D11, а старшие - на ИМС D13. На входе 3 кода I ИМС D11 поддерживается напряжение логической единицы. Входы 10, 12, 13 и 15 кода X ИМС D11 соединены соответственно с выходами 3, 4, 5 и 6 датчика 23 адреса (D10); входы 9, 11, 14 и 1 кода Y ИМС D11 соединены соответственно с выходами 3, 4, 5 и 6 адресного счетчика 17 (D12).
Входы 10, 12, 13 и 15 ИМС D13 соединены соответственно с выходами 11, 10, 9 и 8 датчика 23 адреса (D10). Входы 9, 11, 14 и 1 ИМС D13 соединены соответственно с выходами адресного счетчика 17. Выход 6 (X = Y) ИМС D13 соединен с входами 2 и 12 ИМС D2 (третьего 11 и четвертого 12 элементов И).
Элемент ИЛИ (D14) собран на ИМС К155ЛЛ2 (два логических элемента 2 ИЛИ с открытым коллекторным входом и повышенной нагрузочной способностью) и служит для развязки выходов ИМС D6. Входы 6 и 7 соединены с выходами 6 и 7 порогового устройства 16. Выход 5 подключен к входу одновибратора 19 (вход 5 ИМС D7).
Сигнал разрешения записи в БЗУ 24 подается с выхода 5 ИМС D14, а сигнал обнуления - с первого выхода БУ 3. Данные заносятся с выходов 12, 9, 8 и 11 ИМС D5 (счетчик 13); 3, 4, 5, 6 и 8, 9, 10, 11 ИМС D10 (датчик 23 адреса).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГИСТРАЦИИ СЛАБЫХ СВЕТОВЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2190196C1 |
| РЕГИСТРАТОР СВЕТОВЫХ СИГНАЛОВ | 1997 |
|
RU2117263C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ДЛИНЫ | 1998 |
|
RU2148789C1 |
| СПОСОБ АСИНХРОННОЙ АДРЕСНОЙ СВЯЗИ | 2000 |
|
RU2182403C1 |
| ДИНАМИЧЕСКОЕ ЗАПОМИНАЮЩЕЕ УСТРОЙСТВО РАДИОСИГНАЛОВ | 1999 |
|
RU2149464C1 |
| ОДНОФОТОННЫЙ ПРИЕМНИК ДЛЯ ПРОСТРАНСТВЕННО-ВРЕМЕННОГО ПОИСКА ОПТИЧЕСКИХ ИМПУЛЬСНЫХ СИГНАЛОВ | 2014 |
|
RU2568939C2 |
| МНОГОКАНАЛЬНЫЙ ПАНОРАМНЫЙ ПРИЕМНИК | 1996 |
|
RU2115997C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЗАКОНА ПЕРЕСТРОЙКИ НЕСУЩЕЙ ЧАСТОТЫ РАДИОИМПУЛЬСОВ С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 1998 |
|
RU2133476C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АДАПТИВНЫМ МОБИЛЬНЫМ РОБОТОМ | 2000 |
|
RU2187832C2 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ЛИНЕЙНОГО РАЗМЕЩЕНИЯ ЭЛЕМЕНТОВ | 1999 |
|
RU2163028C2 |

Использование: в технике дистанционного измерения оптико-физических параметров атмосферы. Сущность изобретения: устройство лазерного зондирования атмосферы содержит последовательно соединенные усилитель, амплитудный дискриминатор и формирователь импульсов (ФИ), а также счетчик, адресный счетчик и буферное запоминающее устройство, выход которого подключен к ЭВМ. Особенность устройства состоит в том, что в него введены лазерный передатчик, диссектор с фокусирующе-отклоняющей системой (ФОС) и блоком стробирования питания, блок управления (БУ), блок развертки, счетчик циклов, пороговое устройство, схема совпадения, датчик адреса, одновибратор, элемент НЕ и шесть элементов И. Вход лазерного передатчика соединен с выходом первого элемента И, на первый вход которого заведен сигнал разрешения запуска лазера. Первый выход БУ объединен с вторыми входами первого и шестого элементов И и первым входом буферного запоминающего устройства. Второй вход последнего объединен с выходом датчика адреса и вторым входом схемы совпадения, первый вход которой подключен к выходу адресного счетчика, вход которого объединен с третьим входом БУ и вторым входом пятого элемента И, выход которого соединен со счетным входом датчика адреса, управляющий вход которого объединен с управляющими входами порогового устройства, счетчика и выходом счетчика циклов, вход которого подключен к выходу третьего элемента И, первый вход которого объединен с выходом ФИ и через элемент НЕ - с первыми входами пятого и шестого элементов И. Второй выход БУ подключен к первому входу второго элемента И, выход которого соединен с блоком стробирования питания диссектора. Вход ФИ подключен к первому входу четвертого элемента И, выход которого соединен со счетным входом счетчика, выход которого объединен с третьим входом буферного запоминающего устройства и счетным входом порогового устройства, выход которого объединен с третьим входом буферного запоминающего устройства и входом одновибратора, инвертирующий выход которого подключен к второму входу третьего элемента И. Выход схемы совпадения объединен с вторыми входами третьего и четвертого элементов И, выход шестого элемента И подключен к входу блока развертки, выход которого соединен с ФОС диссектора, выход которого подключен к усилителю. Благодаря такому техническому решению, повышается информативность собираемых данных и снижается мощность, потребляемая системой. 11 ил.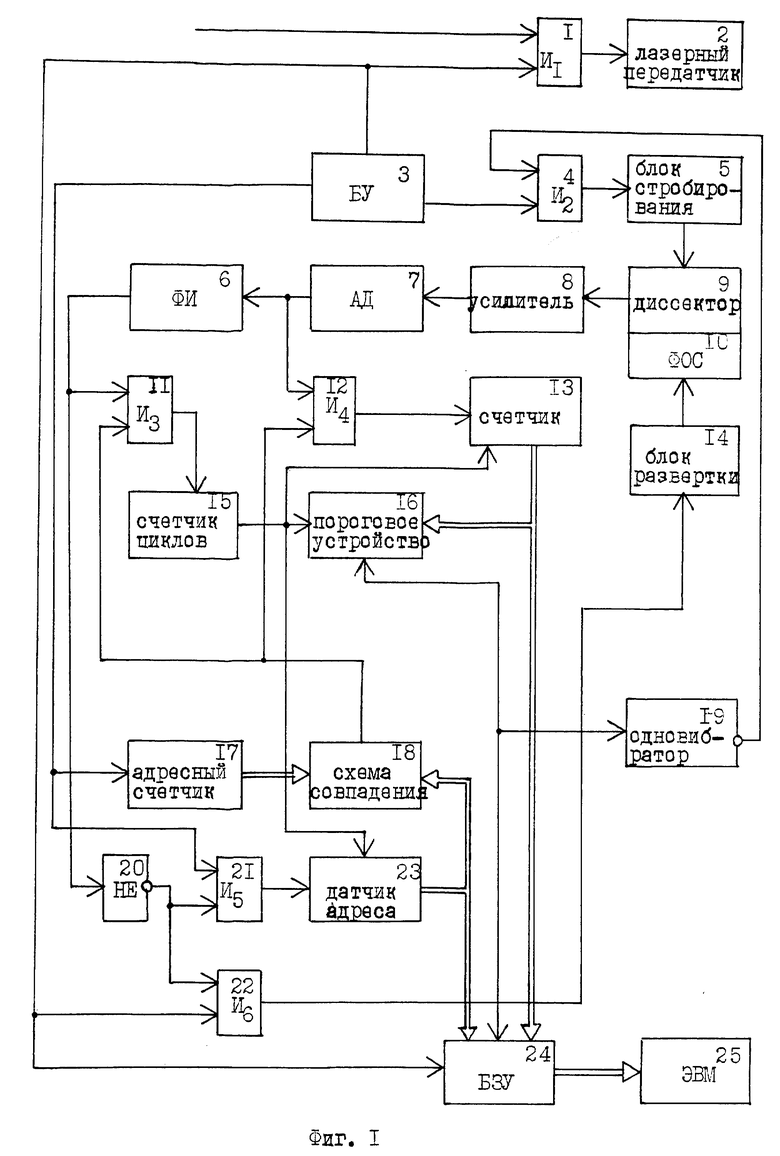
Устройство лазерного зондирования атмосферы, содержащее последовательно соединенные усилитель, амплитудный дискриминатор и формирователь импульсов (ФИ), а также счетчик, адресный счетчик и буферное запоминающее устройство, выход которого подключен к электронно-вычислительной машине (ЭВМ), отличающееся тем, что в него дополнительно введены лазерный передатчик, диссектор с фокусирующе-отклоняющей системой (ФОС) и блоком стробирования питания, блок управления (БУ), блок развертки, счетчик циклов, пороговое устройство, схема совпадения, датчик адреса, одновибратор, элемент НЕ и шесть элементов И, причем вход лазерного передатчика соединен с выходом первого элемента И, на первый вход которого заведен сигнал разрешения запуска лазера, первый выход БУ объединен со вторыми входами первого и шестого элементов И и первым входом буферного запоминающего устройства, второй вход которого объединен с выходом датчика адреса и вторым входом схемы совпадения, первый вход которой подключен к выходу адресного счетчика, вход которого объединен с третьим входом БУ и вторым входом пятого элемента И, выход которого соединен со счетным входом датчика адреса, управляющий вход которого объединен с управляющими входами порогового устройства, счетчика и выходом счетчика циклов, вход которого подключен к выходу третьего элемента И, первый вход которого объединен с выходом ФИ и через элемент НЕ с первыми входами пятого и шестого элементов И, второй выход БУ подключен к первому входу второго элемента И, выход которого соединен с блоком стробирования питания диссектора, вход ФИ подключен к первому входу четвертого элемента И, выход которого соединен со счетным входом счетчика, выход которого объединен с третьим входом буферного запоминающего устройства и счетным входом порогового устройства, выход которого объединен с третьим входом буферного запоминающего устройства и входом одновибратора, инвертирующий выход которого подключен ко второму входу третьего элемента И, выход схемы совпадения объединен со вторыми входами третьего и четвертого элементов И, выход шестого элемента И подключен ко входу блока развертки, выход которого соединен с ФОС диссектора, выход которого подключен к усилителю.
| Витерби М., Адриани А | |||
| Система детектирования отдельных фотонов с регистрацией временной информации для применения в лидаре//Приборы для научных исследований, 1987, N 10, с.46-52. |
